Изобретение относится к спутниковой навигации и может использоваться для контроля целостности навигационного поля глобальной навигационной спутниковой системы (ГНСС). Под контролем целостности навигационного поля ГНСС понимают способность системы обеспечить своевременное предупреждение о тех моментах времени, когда система в целом или отдельные космические аппараты (КА) системы не должны использоваться для навигационных определений [1, с. 440].
Известен способ контроля целостности навигационного поля ГНСС, при котором на космических аппаратах ГНСС осуществляется непрерывный автономный контроль (самоконтроль) функционирования основных бортовых систем [1, с. 337]. Способ автономного контроля предусматривает, что при обнаружении непарируемых нарушений нормального функционирования основных бортовых систем, влияющих на качество излучаемого КА навигационного сигнала и достоверность передаваемого навигационного сообщения, на КА формируется признак его неисправности, который передается потребителю системы в составе оперативной информации навигационного сообщения [1, с. 337].
Недостатком этого способа контроля является его неполнота. Так средства самоконтроля рассчитаны на обнаружение не всех возможных нарушений в работе бортовых систем, неисправности самих средств контроля не обнаруживаются и не сопровождаются передачей соответствующего сообщения потребителям, искажение эфемерид не может быть обнаружено на самом КА ГНСС [1, с. 338].
Известен способ контроля целостности навигационного поля ГНСС, при котором качество навигационного поля анализируется наземной контрольно-корректирующей станцией (ККС), имеющей в составе опорные измерительные станции с известными координатами и передающие средства [1, с. 355-359]. При этом на опорных измерительных станциях принимают навигационные сообщения видимых КА ГНСС. На ККС рассчитывают и передают потребителям дифференциальные поправки для корректной обработки навигационных сообщений при навигационных определениях.
Недостатками описанного способа являются:
- локальная зона обслуживания потребителей, так как дальность обслуживания одной ККС составляет около 300 км [1, с. 357];
- влияние ионосферы на распространение радиосигнала навигационного сообщения, принятого ККС, способное привести к его искажению сообщения и в результате некорректному результату анализа качества функционирования КА ГНСС;
- затраты ресурсов на создание и эксплуатацию ККС.
Известен способ контроля целостности навигационного поля ГНСС, при котором качество навигационного поля контролируется специальной аппаратурой, входящей в состав наземной подсистемы контроля и управления, - аппаратурой контроля поля (АКП) [1, с. 338]. После обнаружения нарушения функционирования бортовой аппаратуры некоторого КА ГНСС аппаратура контроля поля обеспечивает формирование признака неисправности этого КА и передачу признака в альманах всех КА ГНСС.
Недостатками такого способа являются:
- низкая оперативность оповещения потребителей при обнаружении нарушения функционирования КА ГНСС, так как от момента обнаружения нарушения до включения признака неисправности в состав навигационного сообщения КА допускается значительная продолжительность времени (включение признака в альманах всех КА системы должно быть обеспечено не позднее чем через 16 часов [1, с. 338]);
- влияние ионосферы на распространение радиосигнала навигационного сообщения, способное привести к его искажению и в результате некорректному результату анализа качества функционирования КА ГНСС;
- затраты ресурсов на создание и эксплуатацию АКП.
Известен способ-прототип контроля целостности навигационного поля ГНСС, при котором анализ навигационных сигналов осуществляется потребителем путем использования избыточной навигационной информации, получаемой в навигационной аппаратуре потребителей (НАП) от различных видимых КА ГНСС [1, с. 339]. Так, принимая сигналы более чем от четырех видимых КА ГНСС, выполняют навигационные определения по навигационным сообщениям только четырех КА. Выбирают различные комбинации четырех КА из всех видимых КА, получают несколько наборов координат потребителя. Например, приняв сигналы от пяти КА, можно получить пять наборов координат потребителя. Проводят анализ полученных наборов и подтверждают корректность принятых навигационных сообщений или выявляют КА ГНСС, навигационные сообщения которого не должны использоваться для навигационных определений [1, с. 339]. Описанный способ может быть реализован в случае, если НАП принимает навигационные сообщения не менее пяти различных КА ГНСС.
Существенным достоинством способа является возможность оперативного выявления непосредственно в навигационной аппаратуре потребителя космического аппарата ГНСС, транслирующего некорректные навигационные сообщения, которые не должны использоваться в НАП для навигационных определений.
Недостатком описанного способа является невозможность контроля целостности навигационного поля в случае, если в зоне радиовидимости НАП находится меньше пяти КА ГНСС. Необходимость решения задачи контроля целостности навигационного поля при обработке менее пяти навигационных сообщений может быть острой в случаях уменьшения количества KA группировки ГНСС, снижения возможности приема навигационных сообщений в горной или лесной местности, условиях городской застройки.
Задача, на решение которой направлено заявленное изобретение, состоит в обеспечении возможности контроля целостности навигационного поля в случае, если количество КА ГНСС в зоне радиовидимости НАП больше трех КА ГНСС.
Основной технический результат, достигаемый заявленным изобретением, заключается в оперативном обнаружении нарушения функционирования некоторого КА ГНСС, передающего некорректный навигационный сигнал, в случае, если количество КА ГНСС в зоне радиовидимости НАП не менее четырех КА ГНСС.
Сущность изобретения состоит в том, что для контроля целостности навигационного поля глобальной навигационной спутниковой системы применяют навигационную аппаратуру потребителя, осуществляют прием навигационных сообщений космических аппаратов, находящихся в зоне радиовидимости, выполняют навигационные определения, при этом используют часть принятых навигационных сообщений, получают несколько наборов координат потребителя, проводят анализ полученных наборов, подтверждают корректность принятых навигационных сообщений или выявляют космический аппарат, навигационные сообщения которого не должны использоваться для навигационных определений, согласно изобретению совместно с навигационной аппаратурой потребителя размещают аппаратуру хранения шкалы времени потребителя и аппаратуру высокоточных сличений шкалы времени потребителя с системной шкалой времени глобальной навигационной спутниковой системы, перед проведением навигационных определений осуществляют синхронизацию шкалы времени потребителя с системной шкалой времени глобальной навигационной спутниковой системы, при проведении навигационных определений регистрируют время приема навигационного сообщения каждого космического аппарата глобальной навигационной спутниковой системы по шкале времени потребителя, используя которое определяют псевдодальность между каждым космическим аппаратом и аппаратурой потребителя, принимают навигационные сообщения не менее четырех космических аппаратов, определяют один набор координат потребителя по трем значениям псевдодальности.
В соответствии с заявленным способом при приеме четырех навигационных сообщений получают четыре набора координат потребителя. Используя полученные наборы, подтверждают корректность принятых навигационных сообщений или выявляют космический аппарат глобальной навигационной спутниковой системы, навигационные сообщения которого не должны использоваться для навигационных определений.
В основу изобретения положена возможность определения координат потребителя по навигационным сообщениям, полученным от трех КА ГНСС, в случае если шкала времени потребителя совпадает с системной шкалой времени ГНСС.
Следует отметить, что принципы проведения навигационных определений, реализованные в современных ГНСС, не предусматривают необходимости совпадения шкалы времени НАП с системной шкалой времени ГНСС. Применение сигналов ГНСС позволяет определить координаты потребителя навигационной информации после одномоментного приема навигационных сообщений, переданных четырьмя КА ГНСС. Для определения трех координат потребителя и величины отклонения шкалы времени НАП от системной шкалы времени ГНСС используют систему, состоящую из четырех уравнений
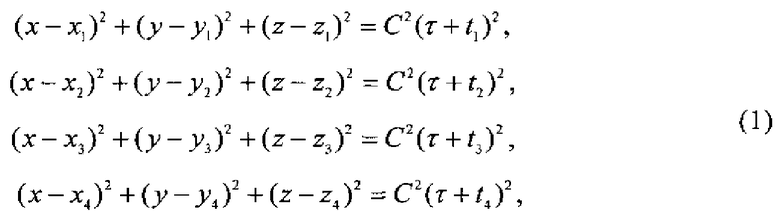
где х, y, z - искомые координаты потребителя; xj, yj, zj - координаты КА ГНСС j=1(1)4, переданные в составе навигационных сообщений; С - скорость света; tj - время распространения сигнала навигационного сообщения от j-ого КА ГНСС до НАП; τ - отклонение шкалы времени НАП от системной шкалы времени ГНСС.
Заявленным способом предусмотрено, что шкала времени НАП совпадает с системной шкалой времени ГНСС. Тогда при условии

из (1) получим

Из системы уравнений (3) следует, что при условии (2) координаты потребителя могут быть определены по навигационным сообщениям трех КА ГНСС.
Существенные признаки, характеризующие изобретение.
1. Размещение совместно с навигационной аппаратурой потребителя ГНСС аппаратуры хранения шкалы времени потребителя и аппаратуры высокоточных сличений шкалы времени потребителя с системной шкалой времени ГНСС.
2. Определение одного набора координат потребителя по трем значениям псевдодальности между космическим аппаратом и аппаратурой потребителя в отличие от способа-прототипа, в котором для определения одного набора координат потребителя требуется не менее четырех навигационных сообщений, полученных от разных КА ГНСС.
3. Проведение синхронизации шкалы времени потребителя с системной шкалой времени ГНСС при подготовке к проведению навигационных определений и контролю целостности навигационного поля.
В способе-прототипе синхронизация шкалы времени потребителя с системной шкалой времени не требуется, так как величину отклонения шкалы времени потребителя от системной шкалы времени определяют при обработке навигационных сообщений путем включения отклонения в состав искомых параметров. Однако для определения такого отклонения требуется получить не менее четырех навигационных сообщений, переданных разными космическими аппаратами ГНСС. И при решении системы уравнений (1) искомыми величинами являются x, y, z, τ. Поэтому по четырем значениям псевдодальности рассчитывают только один набор координат потребителя и контроль целостности навигационного поля при приеме навигационных сообщений от четырех КА ГНСС невозможен.
4. Выполнение следующей совокупности последовательных действий для контроля целостности навигационного поля:
- синхронизация шкалы времени потребителя с системной шкалой времени ГНСС перед проведением навигационных определений;
- определение псевдодальности между космическим аппаратом ГНСС и аппаратурой потребителя;
- определение одного набора координат потребителя по трем значениям псевдодальности;
- выявление КА ГНСС, навигационные сообщения которого не должны использоваться для навигационных определений, путем анализа нескольких наборов координат потребителя, при этом каждый из таких наборов рассчитан по трем значениям псевдодальности.
Основные признаки, отличающие заявленный способ от способа-прототипа.
1. Для измерения псевдодальности между аппаратурой потребителя и космическим аппаратом ГНСС применяют шкалу времени потребителя, которая совпадает с системной шкалой времени ГНСС.
Сличение шкалы времени потребителя с системной шкалой времени позволяет исключить при последующих расчетах погрешность псевдодальности, вызванную отличием шкалы времени потребителя от системной шкалы времени, в отличие от способа-прототипа, в котором такое отличие необходимо учитывать при определении координат потребителя.
2. Отсутствие погрешности определения псевдодальности, вызванной отличием шкалы времени потребителя и системной шкалы времени, позволяет рассчитать координаты потребителя по трем значениям псевдодальности в отличие от способа-прототипа, в котором при расчете координат потребителя определяют поправки к шкале времени и используют для этого не менее четырех значений псевдодальности до разных КА ГНСС.
Следует подчеркнуть, что совпадение шкалы времени потребителя и системной шкалы времени означает единство начала отсчета и равенство размеров единиц времени и частоты таких шкал времени.
При сравнении со способом-прототипом заявленный способ отличается следующим достоинством.
При наличии в зоне радиовидимости НАП только четырех КА ГНСС координаты потребителя могут быть определены по переданным ими четырем навигационным сообщениям. Однако применение способа-прототипа не позволяет выполнить контроль целостности навигационного поля по навигационным сообщениям четырех КА ГНСС. При отсутствии контроля целостности навигационного поля координаты потребителя могут быть рассчитаны неверно. Достоинством заявленного способа является возможность проведения анализа целостности навигационного поля при приеме навигационных сообщений меньшего количества КА ГНСС, чем в способе-прототипе.
Следует подчеркнуть, что при полностью развернутой орбитальной группировке ГНСС, на открытой местности в зоне радиовидимости потребителя находится, как правило, более четырех КА ГНСС, поэтому применение способа-прототипа возможно. Однако в условиях ограниченной видимости, например в горной или лесной местности, существуют препятствия по распространению навигационных сигналов. Поэтому достоинством заявленного способа является возможность контроля целостности навигационного поля по навигационным сообщениям только четырех КА ГНСС.
Применение заявленного способа предусматривает проведение сличения шкалы времени потребителя с системной шкалой времени ГНСС. Очевидно, требования к периодичности проведения сличений зависят от стабильности стандарта частоты эталона времени потребителя. Если в эталоне времени потребителя использовать стандарт с характеристиками, близкими к эталону времени, установленному на КА ГНСС, интервал между сличениями шкал должен составлять около 12 часов.
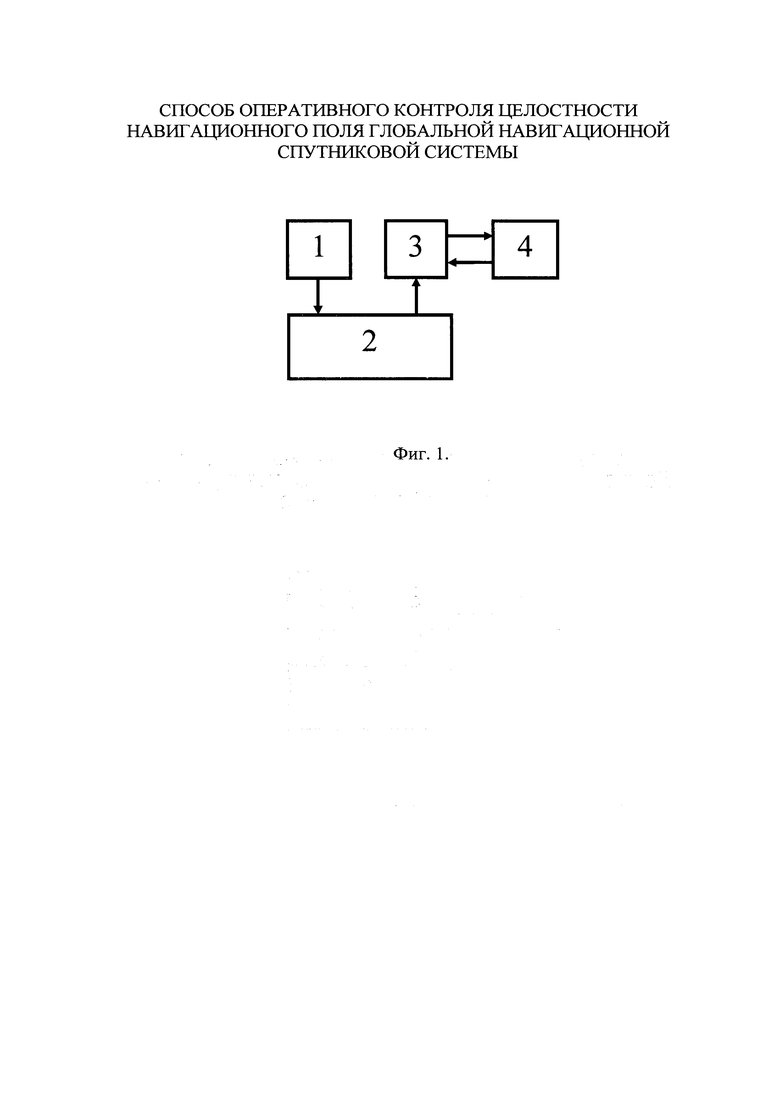
Блок-схема устройства, предназначенного для осуществления предлагаемого способа, представлена на фиг. 1.
Устройство содержит навигационную аппаратуру потребителя 1, аппаратуру хранения шкалы времени потребителя 2, аппаратуру высокоточных сличений шкалы времени потребителя с системной шкалой времени ГНСС 3, бортовую цифровую вычислительную машину (БЦВМ) 4.
При этом выход НАП 1 соединен с первым входом БЦВМ 4, второй выход аппаратуры хранения шкалы времени потребителя 2 соединен со вторым входом БЦВМ 4, первый выход аппаратуры хранения шкалы времени потребителя 2 соединен со входом аппаратуры сличений шкалы времени потребителя 3, выход аппаратуры высокоточных сличений 3 соединен со входом аппаратуры хранения шкалы времени потребителя 2.
Устройство работает следующим образом.
Аппаратура сличений шкалы времени потребителя 3 принимает навигационные сообщения КА ГНСС, принимает от аппаратуры хранения шкалы времени потребителя 2 значения начала отсчета, размеры единиц времени и частоты и осуществляет синхронизацию шкалы времени потребителя с системной шкалой времени ГНСС. НАП 1 принимает навигационные сообщения, переданные КА ГНСС, затем параметры, содержащиеся в навигационных сообщениях, поступают в БЦВМ 4. От аппаратуры 2 в БЦВМ 4 поступают данные шкалы времени потребителя.
БЦВМ 4 определяет псевдодальность между каждым космическим аппаратом и аппаратурой потребителя, определяет один набор координат потребителя по трем значениям псевдодальности, получает несколько наборов координат потребителей, выявляет КА ГНСС, навигационные сообщения которого не должны использоваться для навигационных определений.
Основной технический результат, достигаемый заявленным изобретением, заключается в оперативном обнаружении непосредственно в НАП нарушения функционирования КА ГНСС, передающего некорректный навигационный сигнал, при наличии в зоне радиовидимости НАП более трех КА ГНСС. Результат достигается за счет согласования шкалы времени потребителя с системной шкалой времени ГНСС. Для проведения сличения двух шкал времени совместно с НАП размещают аппаратуру хранения шкалы времени потребителя и аппаратуру высокоточных сличений шкалы времени потребителя с системной шкалой времени ГНСС.
Из последовательности действий, необходимой для осуществления способа, следует, что заявленный способ может быть использован для анализа целостности навигационного поля ГНСС по навигационным сообщениям, переданным более чем тремя КА ГНСС, и многократно воспроизведен.
Литература
1. ГЛОНАСС. Принципы построения и функционирования. / Под ред. А.И. Петрова, В.Н. Харисова. - М.: Радиотехника, 2005.
Изобретение относится к спутниковой навигации и может использоваться для оперативного контроля целостности навигационного поля глобальной навигационной спутниковой системы (ГНСС). Технический результат - расширение функциональных возможностей. Для этого совместно с навигационной аппаратурой потребителя (НАП) размещают аппаратуру хранения шкалы времени потребителя и аппаратуру высокоточных сличений шкалы времени потребителя с системной шкалой времени ГНСС, осуществляют синхронизацию шкалы времени потребителя с системной шкалой времени ГНСС, регистрируют время приема навигационного сообщения космического аппарата (КА) ГНСС по шкале времени потребителя, определяют псевдодальность между каждым КА и аппаратурой потребителя, определяют один набор координат потребителя по трем значениям псевдодальности. Проводят анализ полученных наборов, получают несколько наборов координат потребителя, выявляют КА ГНСС, навигационные сообщения которого не должны использоваться для навигационных определений. 1 ил.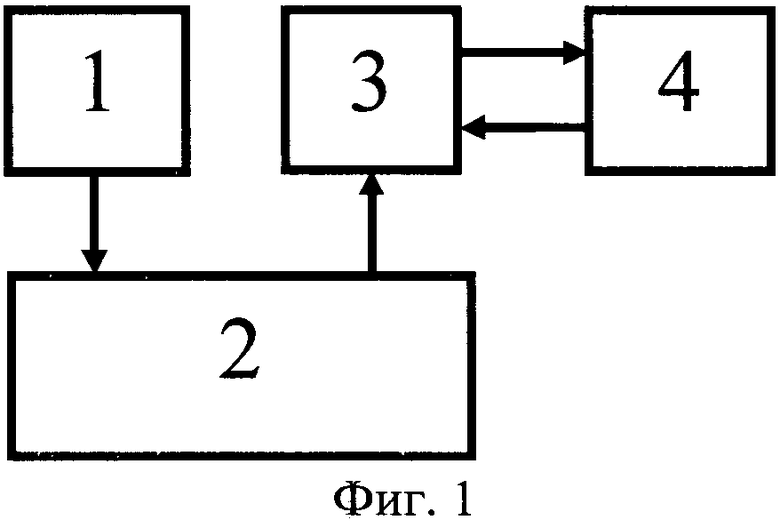
Способ оперативного контроля целостности навигационного поля глобальной навигационной спутниковой системы, в котором применяют навигационную аппаратуру потребителя, осуществляют прием навигационных сообщений космических аппаратов, находящихся в зоне радиовидимости, выполняют навигационные определения, при этом используют часть принятых навигационных сообщений, проводят анализ полученных наборов, получают несколько наборов координат потребителя, выявляют космический аппарат, навигационные сообщения которого не должны использоваться для навигационных определений, отличающийся тем, что совместно с навигационной аппаратурой потребителя размещают аппаратуру хранения шкалы времени потребителя и аппаратуру высокоточных сличений шкалы времени потребителя с системной шкалой времени глобальной навигационной спутниковой системы, перед проведением навигационных определений осуществляют синхронизацию шкалы времени потребителя с системной шкалой времени глобальной навигационной спутниковой системы, при проведении навигационных определений регистрируют время приема навигационного сообщения каждого космического аппарата глобальной навигационной спутниковой системы по шкале времени потребителя, используя которое определяют псевдодальность между каждым космическим аппаратом и аппаратурой потребителя, определяют один набор координат потребителя по трем значениям псевдодальности.
| ГЛОНАСС | |||
| Принципы построения и функционирования | |||
| / Под ред | |||
| А.И | |||
| Петрова, В.Н | |||
| Харисова | |||
| - М: Радиотехника, 2005 | |||
| с | |||
| Ручной ткацкий станок | 1922 |
|
SU339A1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ЦЕЛОСТНОСТИ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2411533C1 |
| СОЛОВЬЕВ Ю.А | |||
| Системы спутниковой навигации | |||
| - М.: КТЦ-"Эко-Трендз", 2000, с.368 | |||
| СПОСОБ ПОВЫШЕНИЯ ЦЕЛОСТНОСТИ ИСПОЛЬЗУЕМЫХ СИГНАЛОВ НАВИГАЦИОННЫХ СПУТНИКОВ С ПОМОЩЬЮ ЛОКАЛЬНОЙ КОНТРОЛЬНО-КОРРЕКТИРУЮЩЕЙ СТАНЦИИ (ЛККС) С УЧЕТОМ ВЛИЯНИЯ АНОМАЛЬНОЙ ИОНОСФЕРЫ | 2013 |
|
RU2542326C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ НАВИГАЦИОННО-ТОПОГЕОДЕЗИЧЕСКИХ ПАРАМЕТРОВ | 2010 |
|
RU2431803C1 |
| WO 60420 A1, 12.10.2000. | |||

