Изобретение относится к системам управления беспилотными объектами и может быть использовано в системах управления движением объекта в вертикальной плоскости.
Известно устройство управления [1], содержащее до трех локационных высотомеров, до трех инерциальных датчиков вертикального ускорения, блок исключения помех, устройство коррекции высоты. При этом выходы локационных высотомеров и инерциальных датчиков подключены к соответствующим входам блока исключения помех, выход которого соединен с входом устройства коррекции высоты. В выходы устройства коррекции высоты соединены с третьим входом блока исключения помех и входом внешней системы управления.
Недостатком известного устройства является дороговизна построенной на его основе системы управления. Данный недостаток вызван тем, что в указанном устройстве исключение помех в канале высоты достигается за счет избыточности измерителей, что удорожает техническую реализацию.
Известно устройство управления [2], принятое за прототип и содержащее измеритель координат управляемого объекта, радиовысотомер /РВ/, блок сравнения, устройство коррекции высоты. Причем выход РВ соединен с входом блока сравнения, выход которого подключен к первому входу устройства коррекции высоты, второй вход которого соединен с выходом измерителя координат управляемого объекта. Выход устройства коррекции высоты подключен к входу внешнего устройства управления.
Недостатком устройства, принятого за прототип, является недостаточная надежность системы управления, т.к. контроль измерений РВ производится по текущим измерениям, что позволяет идентифицировать только грубые ошибки в измерениях РВ и исключать их из дальнейшего использования. Другие негрубые ошибки РВ проходят в дальнейшую обработку в устройстве коррекции и влияют на работу системы управления.
Задачей, на решение которой направлено изобретение, является повышение надежности системы управления полетом над водной поверхностью за счет улучшенной идентификации отказов и ложной информации в измерениях геометрической высоты без дополнительных измерителей.
Поставленная задача для первого варианта устройства для управления полетом над водной поверхностью, включающего измеритель геометрической высоты и измеритель координат, решается за счет того, что согласно изобретению в него дополнительно введены блок памяти, блок исключения помех и блок динамического оценивания, причем выход измерителя геометрической высоты и выход измерителя координат соединены с первым и вторым входами блока памяти, третий вход которого соединен с выходом блока исключения помех, вход которого соединен с первым выходом блока памяти, второй выход блока памяти соединен с входом блока динамического оценивания, выход блока динамического оценивания соединен с четвертым входом блока памяти, третий выход блока памяти соединен с входом внешней системы управления. Таким образом, первый вариант, в котором выход блока динамического оценивания замкнут на вход блока памяти, выполнен по разомкнутой схеме. Второй вариант, выполненный по замкнутой схеме, отличается от первого тем, что выход блока динамического оценивания соединен с входом измерителя координат.
К существенным отличиям заявленного устройства от известного относится то, что оно дополнительно содержит блок памяти, блок исключения помех и блок динамического оценивания. Заявленное устройство за счет работы блока памяти и блока исключения помех улучшает идентификацию отказов и ложной информации в измерениях геометрической высоты без введения дополнительных измерителей, при этом улучшены условия работы блока динамического оценивания и тем самым повышена надежность системы управления полетом над водной поверхностью. Поэтому предлагаемый способ имеет существенное практическое значение.
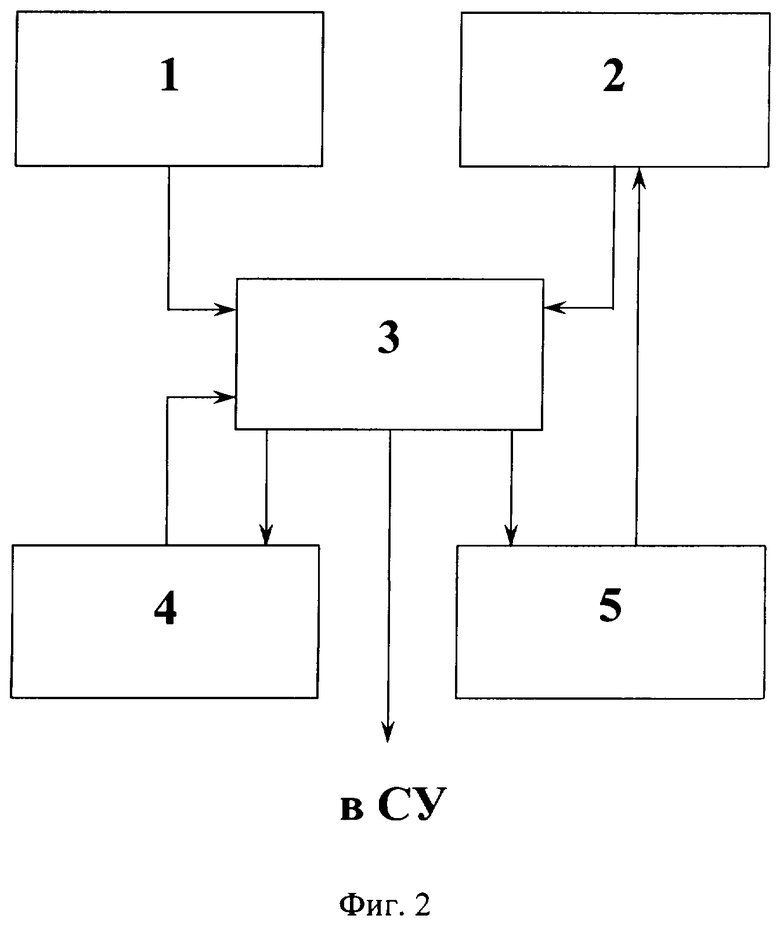
На фиг.1 приведена блок-схема первого варианта предложенного устройства для управления полетом над водной поверхностью, на фиг.2 представлена блок-схема второго варианта устройства для управления полетом над водной поверхностью.
Устройство для управления полетом над водной поверхностью по первому варианту содержит измеритель 1 геометрической высоты, измеритель 2 координат, блок 3 памяти, блок 4 исключения помех, блок 5 динамического оценивания. Выход измерителя 1 геометрической высоты и выход измерителя 2 координат соединены с первым и вторым входами блока 3 памяти, третий вход блока 3 памяти соединен с выходом блока 4 исключения помех, вход которого соединен с первым выходом блока 3 памяти, второй выход блока 3 памяти соединен с входом блока 5 динамического оценивания, выход блока 5 динамического оценивания соединен с четвертым входом блока 3 памяти, третий выход блока 3 памяти соединен с входом внешней системы управления.
В качестве измерителя 1 геометрической высоты может быть использован радиовысотомер, а в качестве измерителя 2 абсолютной высоты - инерциальная навигационная система /ИНС/. В качестве блока 3 памяти может быть использован микроконтроллер, вычислительно-логические блоки 4 исключения помех и 5 динамического оценивания могут быть выполнены, например, в виде однопроцессорных вычислителей, информационный обмен между входами-выходами блоков осуществляется по линиям связи, показанным на блок-схеме тонкой сплошной линией. Линии связи представляют собой известные линии связи и информационного обмена, например, по последовательному коду, по параллельному коду, мультиплексные и др.
Устройство работает следующим образом.
Измерения измерителя 1 геометрической высоты и измерителя 2 абсолютной высоты поступают в блок 3 памяти, в котором образуется непрерывно обновляющаяся последовательность задержанных измерений, обладающая свойством FILO списка. Измерения из блока 3 памяти поступают на вход блока 4 исключения помех, в котором осуществляется пороговый контроль, контроль на достоверность и исключение ложных данных из последовательности задержанных измерений измерителя 1 геометрической высоты, образованной в блоке 3 памяти. Информация о достоверности измерений возвращается в блок 3 памяти, достоверные измерения измерителя 1 геометрической высоты смешиваются с данными измерителя 2 координат на один и тот же момент времени и подаются на вход блока 5 динамического оценивания. Оценки ошибок определения высоты измерителем 2 координат, полученные в блоке 5 динамического оценивания, поступают на вход блока 3 памяти, где производится коррекция высоты и вертикальной скорости измерителя 2 координат по результатам работы блока 5 динамического оценивания, а затем экстраполяция этой высоты и вертикальной скорости на текущий момент времени с использованием измерений измерителя 2 координат. Из блока 3 памяти оценки геометрической высоты в виде экстраполированной на текущий момент времени высоты и вертикальной скорости подаются на вход внешней системы управления.
Во втором варианте устройства управления полетом объекта над водной поверхностью выход блока 5 динамического оценивания соединен с входом измерителя 2 координат. Оценки ошибок определения высоты измерителем 2 координат из блока 5 динамического оценивания поступают на вход измерителя 2 координат. На вход блока 3 памяти подаются скорректированные данные измерителя 2 координат. Из блока 3 памяти оценки геометрической высоты в виде экстраполированной высоты подаются на вход внешней системы управления.
Пояснение сущности изобретения
Проблема идентификации ложной информации обычно решается пороговыми испытаниями текущих измерений для исключения грубых сбоев [2] или динамической фильтрацией для снижения влияния пропущенных помех. Другой известный способ идентификации ложных измерений - сопоставление однотипных измерений от разных источников [1].
Первый способ не обеспечивает достаточную надежность исключения ложной информации. В систему после фильтра проходит ложная информация, что снижает потенциальные возможности системы управления.
Второй способ обеспечивает более высокое качество исключения ложных измерений. Однако это качество обеспечивается аппаратной избыточностью, что во многих случаях является недопустимой ценой.
Известно, что в полете над водной поверхностью РВ используют в качестве корректора ИНС, а управление осуществляют по информации ИНС.
Заявленное техническое решение основано на следующем.
1. Достоверность оценки ложных измерений РВ по одиночным измерениям ниже, чем по измерениям на интервале времени (последовательной группе измерений).
2. Качество коррекции вертикального канала ИНС по измерениям РВ тем выше, чем меньше в измерениях РВ ложной информации.
3. Чем надежнее коррекция ИНС, тем продолжительнее интервал времени безопасного полета над водной поверхностью по информации ИНС.
В блоке памяти в соответствии с предложенным решением образуют последовательность из N измерений РВ и ИНС на некотором интервале времени. Организация последовательности измерений осуществлена по принципу FILO (первый пришел - первый ушел). Каждое измерение проходит последовательность от начала до конца и выталкивается текущим измерением из конца очереди в блок динамического оценивания.
Блок динамического оценивания работает по задержанным в блоке памяти и очищенным от помех в блоке исключения помех измерениям. Блок динамического оценивания построен по методу динамической фильтрации Калмана и предназначен для коррекции вертикального канала ИНС. Фильтрацию Калмана обычно осуществляют по текущим измерениям. В предложенном устройстве фильтрация производится по отложенным измерениям, прошедшим исключение помех в измерениях РВ. В разомкнутой схеме оценки вектора состояния, полученные по измерениям с запаздыванием, возвращаются в блок памяти, где производится экстраполяция на текущий момент времени. В замкнутой схеме возможность отсроченной фильтрации основана на использовании в системе управления измерений ИНС, прошедших коррекцию по ранее выполненным измерениям.
Действия, осуществляемые в блоках памяти, исключения помех и динамического оценивания могут осуществляться, например, приведенным ниже образом.
Блок памяти непрерывно формирует выходную высоту  на вход системы управления. Эта же высота
на вход системы управления. Эта же высота  и текущая измеренная РВ высота hPB поступают из блока памяти на вход блока исключения помех. Блок исключения помех находит невязку
и текущая измеренная РВ высота hPB поступают из блока памяти на вход блока исключения помех. Блок исключения помех находит невязку
 .
.
 используется для исключения помех, например, по следующей схеме.
используется для исключения помех, например, по следующей схеме.
1. На скользящем интервале длительностью m шагов подсчитывается число s измерений, удовлетворяющих условию
 .
.
2. Если s>0.7 m, то измерения на интервале считаются ложными и исключаются из дальнейшей обработки.
Числа m и ΔДОП выбираются из следующих условий:
- частота принятия хороших измерений за ложные должна быть допустимой и не оказывать влияния на процесс коррекции ИНС;
- пропуск нераспознанных ложных измерений не должен искажать коррекцию ИНС и оказывать влияния на процессы и безопасность управления.
В необходимых случаях реализуют многоуровневую схему исключения помех на интервалах различной длительности.
Из блока исключения помех в блок памяти поступают признаки достоверности измерений РВ.
Если измерение РВ ложное, то такое измерение не проходит в блок динамического оценивания. Блок динамического оценивания на шаге ложного измерения РВ не работает и свое состояние не изменяет.
Если измерение РВ правильное, то формируется измерение
 ,
,
где  и
и  - измерения РВ и ИНС с прошлого момента времени.
- измерения РВ и ИНС с прошлого момента времени.
Измерение поступает на вход блока динамического оценивания.
Вектор состояния фильтра обычно  , где Δh - ошибка по высоте, ΔVy - ошибка по скорости, ΔaY - ошибка по ускорению ИНС.
, где Δh - ошибка по высоте, ΔVy - ошибка по скорости, ΔaY - ошибка по ускорению ИНС.
Оценки ошибок в замкнутой схеме оценивания (вариант 2) поступают в ИНС. В замкнутой схеме оценивания в качестве высоты на вход системы управления  используется текущая hИНС.
используется текущая hИНС.
Оценки ошибок в разомкнутой схеме оценивания (вариант 1) поступают в блок памяти. В блоке памяти осуществляется экстраполяция измерений ИНС с использованием полученных оценок ошибок, например, по схеме
 ,
,
где τ - интервал экстраполяции.
Таким образом, приведено физическое обоснование заявленного технического решения и вариант его реализации. Показана техническая осуществимость заявленного решения, его новизна и достижимость заявленного технического результата без использования дополнительных измерителей.
Литература.
1. «Измерение параметров полета вблизи морской поверхности», А.В.Небылов, СПБГААП. СПб, 1994 г., стр.234.
2. Патент РФ №2062503, МПК G05D 1/04, опубликован 1996.06.20 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОРРЕКЦИИ ОШИБОК ИНС ЛЕТАТЕЛЬНОГО АППАРАТА ПО ДОРОЖНОЙ КАРТЕ МЕСТНОСТИ | 2018 |
|
RU2684710C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы беспилотного летательного аппарата малой дальности с использованием интеллектуальной системы геопространственной информации | 2019 |
|
RU2722599C1 |
| УНИФИЦИРОВАННЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ЛА | 2015 |
|
RU2590934C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБКИ ИЗМЕРЕНИЯ СКОРОСТИ ЛА ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ И БОРТОВОЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2411538C2 |
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ АБСОЛЮТНОЙ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2346242C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| Способ выявления неисправностей и отказов бортовых измерителей параметров движения и спутниковых навигационных систем движущихся объектов | 2017 |
|
RU2668597C1 |
| ИНЕРЦИАЛЬНО-РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2539846C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2590935C1 |
Изобретение относится к системам управления беспилотными объектами и может быть использовано в системах управления движением объекта в вертикальной плоскости. В первом варианте исполнения в устройство, включающее измеритель геометрической высоты и измеритель координат, дополнительно введены блок памяти, блок исключения помех и блок динамического оценивания, причем блок памяти первым и вторым входами соединен с выходом измерителя геометрической высоты и выходом измерителя координат, третий вход блока памяти соединен с выходом блока исключения помех, вход которого соединен с первым выходом блока памяти, второй выход блока памяти соединен с входом блока динамического оценивания, выход блока динамического оценивания соединен с четвертым входом блока памяти, третий выход блока памяти соединен с входом внешней системы управления. Второй вариант устройства отличается от первого тем, что выход блока динамического оценивания соединен с входом измерителя координат. Технический результат заключается в повышении надежности системы управления полетом над водной поверхностью. 2 н.п. ф-лы, 2 ил.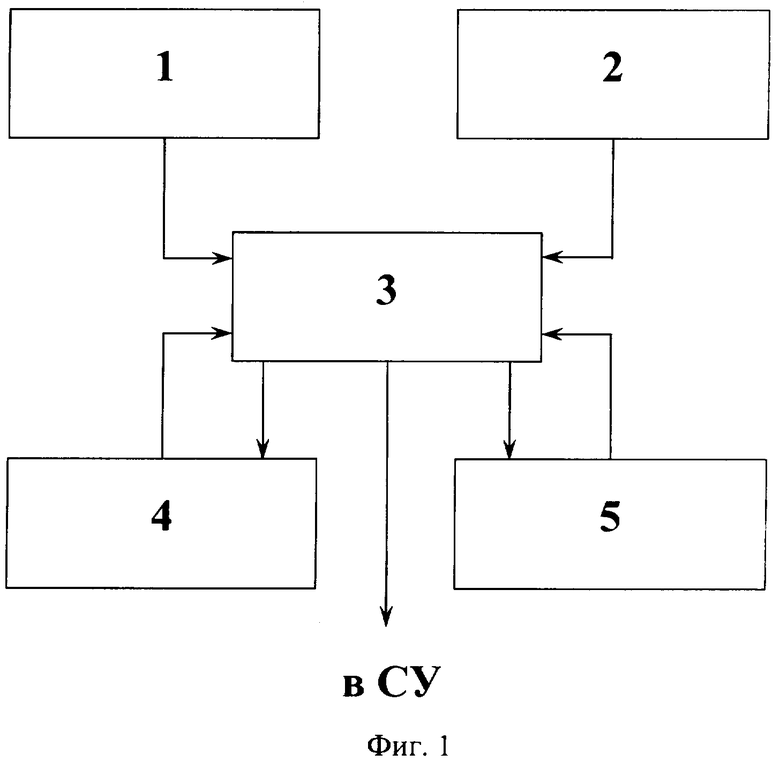
1. Устройство для управления полетом над водной поверхностью, включающее измеритель геометрической высоты и измеритель координат, отличающееся тем, что в него дополнительно введены блок памяти, блок исключения помех и блок динамического оценивания, причем выход измерителя высоты и выход измерителя координат соединены с первым и вторым входами блока памяти, третий вход которого соединен с выходом блока исключения помех, вход которого соединен с первым выходом блока памяти, второй выход блока памяти соединен с входом блока динамического оценивания, выход блока динамического оценивания соединен с четвертым входом блока памяти, третий выход блока памяти соединен с входом внешней системы управления.
2. Устройство для управления полетом над водной поверхностью, включающее измеритель геометрической высоты и измеритель координат, отличающееся тем, что в него дополнительно введены блок памяти, блокисключения помех и блок динамического оценивания, причем выход измерителя высоты и выход измерителя координат соединены с первым и вторым входами блока памяти, третий вход которого соединен с выходом блока исключения помех, вход которого соединен с первым выходом блока памяти, второй выход блока памяти соединен с входом блока динамического оценивания, выход блока динамического оценивания соединен с входом измерителя координат, третий выход блока памяти соединен с входом внешней системы управления.
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2062503C1 |
| УСТРОЙСТВО ПРЕДУПРЕЖДЕНИЯ ОБ ОПАСНОМ УГЛЕ ТАНГАЖА ДЛЯ УЛУЧШЕННОЙ СИСТЕМЫ ПРЕДУПРЕЖДЕНИЯ ОПАСНОГО СБЛИЖЕНИЯ С ЗЕМЛЕЙ (УСПОС) | 2002 |
|
RU2282157C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 2003 |
|
RU2234739C1 |
| УСТРОЙСТВО БЕЗВОЗДУШНОГО РАСПЫЛЕНИЯ КРАСКИ | 1991 |
|
RU2031742C1 |
| Измерение параметров полета вблизи морской поверхности», А.В.Небылов, СПБГААП | |||
| СПб, 1994, стр.234. | |||

