Изобретение относится к области станкостроения, а именно к металлообрабатывающим станкам с программным управлением для обработки корпусных деталей малой жесткости, используемых, например, для фрезерования вафельного фона в обечайках и днищах, а также для фрезерования каналов пролива в стенках камер сгорания ракетных двигателей.
Известен фрезерный станок, содержащий станину с опорами для установки обрабатываемой детали и фрезерной головкой. Подлежащую обработке деталь заформовывают в упругую оболочку, на которой выполняют следящие поверхности и в таком виде устанавливают на базовые поверхности станины. Фрезерная головка оснащена двумя следящими опорами, установленными на фрезерной головке с двух сторон относительно фрезы. В процессе обработки детали следящие опоры контактируют со следящими поверхностями упругой оболочки и задают закон перемещения фрезе, что позволяет получить обрабатываемую поверхность эквидистантной базовым поверхностям оболочки (см. патент РФ №2256536, кл. B23C 3/00, 2005 г.).
В результате анализа конструкции станка необходимо отметить, что упругая оболочка гасит вибрации, возникающие в процессе обработки, что позволяет повысить чистоту обработки, однако вследствие того, что оболочка является упругой, при изменении усилия поджима фрезерной головки к оболочке изменяется положение следящих элементов и фрезы относительно обрабатываемой детали, что снижает точность обработки. Кроме того, выполнение следящими элементами функции поджима детали к базовым поверхностям станины значительно ухудшают условия копирования, что также отрицательно сказывается на точности обработки.
Известна следящая система фрезерного станка, выполненная в виде скобы. шарнирно установленной на станке, на одном плече которой закреплен щуп, выполненный в виде шаровой опоры, а на другом установлена фрезерная головка (см. патент РФ N2235004, кл. В23С 3/00, 2003 г.).
При работе станка обрабатываемая деталь располагается между щупом и фрезерной головкой. В процессе обработки обрабатываемая деталь совершает формообразующие перемещения, а щуп контактирует с ее поверхностью, отслеживая ее и задавая управляющие перемещения фрезерной головке и, естественно, фрезе, которая осуществляет обработку детали. Данная система слежения подвержена вибрациям, возникающим при работе оборудования, что отрицательно сказывается на точности обработки и не позволяет вести обработку на высоких режимах резания с высокой точностью обработки.
Известен многошпиндельный фрезерный станок, содержащий основание с кольцевым столом для установки обрабатываемой детали, стойки для фрезерных головок и следящих систем, установленные по периметру стола, виброгасители, предназначенные для взаимодействия с кольцевым столом, причем стойки расположены попарно, одна стойка каждой пары несет фрезерную головку, а другая - следящую опору, одна стойка, расположенная с внешней стороны стола, несет следящие опоры, а с внутренней - фрезерную головку, следящие опоры, и фрезерные головки установлены на стойках с возможностью независимого вертикального перемещения, причем на стойках размещены дополнительные виброгасители, выполненные в виде роликов с механизмами их поджима к детали (см. а.с. СССР №1566600, кл. В23С 3/00, 1988 г.) - наиболее близкий аналог.
В результате анализа известного станка необходимо отметить, что его следящая система обеспечивает слежение за контуром обрабатываемой поверхности, однако применение большого количества виброгасителей значительно усложняет конструкцию станка и в то же время не позволяет проводить обработку с высокой производительностью, так как обеспечивающие гашение вибраций ролики с упругими опорами и поджимающими гидроцилиндрами неэффективны при работе на больших скоростях резания. Все это снижает производительность и точность обработки.
Задачей настоящего изобретения является разработка конструкции металлообрабатывающего станка, на точность работы которого не оказывают влияние вибрации, что позволяет вести обработку на высоких скоростях резания, обеспечивая высокие точность и чистоту обработки.
Поставленная задача обеспечивается тем, что в металлообрабатывающем станке, содержащем основание со столом для установки обрабатываемой детали, на котором напротив друг друга установлена с возможностью согласованного возвратно-поступательного перемещения посредством приводов по меньшей мере одна пара кареток, на одой из которых размещена инструментальная головка, а на другой - следящий элемент, новым является то, что станок снабжен блоком управления, связанным с приводами кареток, выполненными регулируемыми и оснащенными датчиками обратной связи, следящий элемент выполнен в виде сопла, связанного магистралью с системой подачи воздуха и параллельно соединенного с бесштоковой полостью камеры, разделенной на две полости упругой мембраной, на которой закреплен шток, соединенный с подвижным элементом преобразователя линейных перемещений, который связан с блоком управления.
В конструкции системы использованы известные узлы и агрегаты. Так в качестве преобразователя линейных перемещений возможно использование преобразователя ЛИР-14.
Сущность изобретения поясняется чертежом, на котором представлена схема металлообрабатывающего станка.
Металлообрабатывающий станок содержит следящий элемент, выполненный в виде сопла 1, связанный магистралью 2 с системой подачи сжатого воздуха.
Станок содержит камеру 3 с установленной в ней мембраной 4, к которой присоединен шток 5, образующий штоковую полость камеры. Бесштоковая полость камеры 3 соединена с магистралью 2 параллельно соплу. Шток 5 соединен (скреплен) с подвижным элементом (штоком) 6 преобразователя 7 линейных перемещений.
Магистраль 2 соединена со станцией 8 подготовки воздуха, подаваемого в сопло 1, состоящей из последовательно соединенных влагоотделителя 9 и регулятора давления 10, значение которого отслеживается манометром 11.
Сопло 1 смонтировано в корпусе 12, размещенном на каретке 13 станка, оснащенной механизмом 14 осевого перемещения, выполненным, например, в виде ходового винта. Привод 15 осевого перемещения выполнен регулируемым и оснащен датчиком 16 обратной связи.
Инструментальная головка 17 (например, фрезерная) с инструментом (фрезой) - позицией не обозначена - установлена на каретке 18 с возможностью осевого возвратно-поступательного перемещения. Привод 19 возвратно-поступательного перемещения является регулируемым и содержит датчик 20 обратной связи.
Обрабатываемая деталь обозначена позицией 21.
Естественно, что элементы станка установлены на основании (не показано). Обрабатываемая деталь устанавливается на столе (не показан) станка.
Исполнение всех блоков и модулей системы является известным и не составляет предмета патентной охраны настоящей заявки.
Металлообрабатывающий станок работает следующим образом. Функционирование станка рассмотрим на примере управления обработкой карманов крупногабаритной детали на фрезерном станке. По условиям обработки на детали необходимо обеспечить постоянный (в пределах 0,05 мм) размет дна кармана (t).
Естественно, что для других видов станков следящая система функционирует аналогично.
Работу рассмотрим на примере одной фрезерной головки и одного следящего элемента. Естественно, что если станок содержит несколько инструментальных и следящих кареток, то их работа аналогична описанному ниже.
Подлежащую обработке деталь 21 фиксируют в приспособлениях фрезерного станка, в результате чего деталь располагается между установленными напротив друг друга каретками 13 и 18.
Включают работу станка и подачу воздуха в сопло 1. По команде с блока управления 22 включают привод 15, посредством которого каретка 13 получает перемещение в направлении к обрабатываемой детали, скорость такого перемещения весьма мала. Перемещение отслеживается датчиком 16.
При подводе сопла к обрабатываемой детали 21 зазор между торном сопла и поверхностью детали постепенно уменьшается. По мере уменьшения зазора сопротивление истечению воздуха из сопла постепенно увеличивается, что приводит к постепенному увеличению давления в магистрали 2. При увеличении давления воздуха в магистрали 2 постепенно увеличивается давление в бесштоковой полости камеры 3, в результате чего мембрана 4 упруго деформируется и перемещает шток 5. Шток 5 перемещает шток 6 преобразователя 7 линейных перемещений. Сигнал с преобразователя 7 поступает в блок управления 22, который в заданный момент (при достижении заданного давления на торце сопла и, следовательно, в бесштоковой полости камеры (в пневматической системе), дает команду на останов привода 15.
По завершении данного цикла (выставка сопла в заданное положение относительно поверхности обрабатываемой детали) блок управления 22 дает команду на включение привода 19 перемещения каретки 18 с инструментальной головкой 17 в положение обработки делали. Обработка делали может производиться формообразующими перемещениями детали или согласованными перемещениями инструмента и детали (кареток 13 и 18).
Наиболее целесообразно формообразующие перемещения сообщать обрабатываемой детали, а инструменту сообщать лишь осевую подачу и вращение.
Если обрабатываемая деталь абсолютно жесткая и не имеет геометрических отклонений, процесс обработки протекает штатно, формируется, например, карман или обечайка с заданной точностью по полотну (t). В случае отклонения геометрической формы обрабатываемой детали от заданной, например наличие овальности, изменяется величина зазора (s) между торцом сопла 1 и поверхностью обрабатываемой детали (не становится больше или меньше).
В случае увеличения зазора (s) давление в магистрали 2 снижается, степень деформации мембраны 4 уменьшается и шток 5 совершает перемещение вправо (в плоскости чертежа), перемещая на определенное расстояние (пропорциональное уменьшению давления) шток 6 преобразователя 7, который передает информацию о величине перемещения в блок управления 22, который включает на подвод сопла привод 15. Перемещение каретки 13. Перемещение будет продолжаться до тех пор, пока расстояние между соплом 2 и поверхностью детали не достигнет заданного значения (определяется по изменению давления, истекающего из сопла 2 воздуха), после чего блок управления дает команду на отключение привода 15. Одновременно с подводом каретки 13 с соплом 2 к поверхности обрабатываемой детали обеспечивается отвод (по команде блока управления) фрезерной головки от обрабатываемой детали на величину перемещения сопла 2, то есть расстояние между торцом сопла и фрезой остается неизменным, что позволяет обеспечить постоянство толщины (t) обрабатываемой детали.
В случае, когда зазор (s) начинает уменьшаться, например, при некруглости обрабатываемой детали, давление магистрали 2 начинает повышаться, что приводит к повышению давления в бесштоковой полости камеры 3 и дополнительной деформации мембраны 4, которая перемещает шток 5 влево (в плоскости чертежа), срабатывает преобразователь 7 линейных перемещений, на основании сигналов с которого в блок управления, последний дает команду на включение привода 15 на отвод каретки, а следовательно, и сопла от поверхности обрабатываемой детали. Перемещение сопла происходит до тех пор, пока давление на выходе сопла не составит заданного значения. Одновременно с отводом сопла блок управления дает команду на подвод головки 17 с фрезой на это же расстояние по направлению к обрабатываемой детали, обеспечивая тем самым, заданное расстояние между торцами сопла и фрезы, что позволяет обеспечить получение постоянной толщины (t) обрабатываемой детали.
Использование данной системы слежения позволяет отказаться от применения контактного щупа, повысив тем самым виброустойчивость системы СПИД, благодаря чему возможно вести обработку на режимах в 3-4 раза выше по сравнению со станками, оснащенными контактными следящими элементами без ущерба для точности и чистоты обработки.
Общая производительность, например, при обработке обечаек (образование вафельного фона) возрастает не менее чем в три раза.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНОК ФРЕЗЕРНЫЙ МНОГОШПИНДЕЛЬНЫЙ | 2011 |
|
RU2461450C1 |
| УНИВЕРСАЛЬНЫЙ ДЕРЕВООБРАБАТЫВАЮЩИЙ ТОКАРНО-ФРЕЗЕРНЫЙ СТАНОК | 1996 |
|
RU2109625C1 |
| МНОГОШПИНДЕЛЬНЫЙ ФРЕЗЕРНЫЙ СТАНОК | 2003 |
|
RU2235004C1 |
| Установка для зачистки проката | 1985 |
|
SU1424989A1 |
| МЕТАЛЛОРЕЖУЩИЙ СТАНОК | 1992 |
|
RU2033914C1 |
| Продольно-строгально-фрезерный станок | 1991 |
|
SU1797526A3 |
| СТАНОК ГОРИЗОНТАЛЬНЫЙ ФРЕЗЕРНЫЙ МНОГОШПИНДЕЛЬНЫЙ | 2011 |
|
RU2465104C1 |
| ФРЕЗЕРНЫЙ СТАНОК | 2019 |
|
RU2705482C1 |
| МЕТАЛЛОРЕЖУЩИЙ ОБРАБАТЫВАЮЩИЙ ЦЕНТР С ЗАГРУЗОЧНЫМ УСТРОЙСТВОМ | 2004 |
|
RU2257287C1 |
| СПОСОБ И МЕТАЛЛООБРАБАТЫВАЮЩИЙ СТАНОК ДЛЯ ОБРАБОТКИ РЕЗАНИЕМ КОМПЛЕКСНЫХ КОНТУРОВ АСИММЕТРИЧНЫХ ДЕТАЛЕЙ | 2009 |
|
RU2397844C1 |
Станок содержит основание со столом для установки обрабатываемой детали, на котором напротив друг друга установлена с возможностью согласованного возвратно-поступательного перемещения посредством приводов по меньшей мере одна пара кареток, на одной из которых размещена инструментальная головка, а на другой - следящий элемент. Для повышения точности и чистоты обработки станок снабжен блоком управления, связанным с приводами кареток, выполненными регулируемыми и оснащенными датчиками обратной связи. Следящий элемент выполнен в виде сопла, связанного магистралью с системой подачи воздуха и параллельно соединенного с бесштоковой полостью камеры, разделенной на две полости упругой мембраной, на которой закреплен шток, соединенный с подвижным элементом преобразователя линейных перемещений, который связан с блоком управления. 1 ил.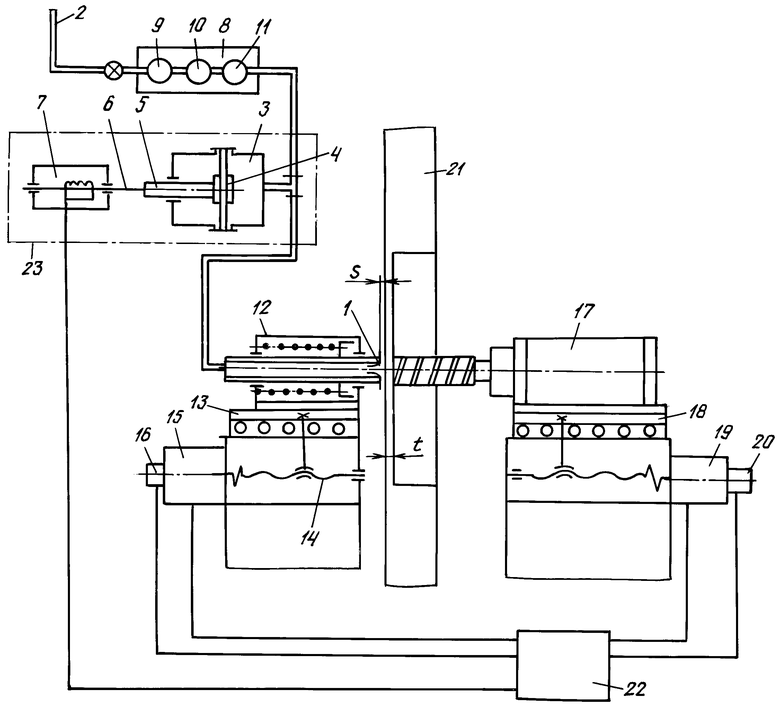
Металлообрабатывающий станок, содержащий основание со столом для установки обрабатываемой детали, на котором напротив друг друга установлена с возможностью согласованного возвратно-поступательного перемещения посредством приводов по меньшей мере одна пара кареток, на одной из которых размещена инструментальная головка, а на другой - следящий элемент, отличающийся тем, что станок снабжен блоком управления, связанным с приводами кареток, выполненными регулируемыми и оснащенными датчиками обратной связи, следящий элемент выполнен в виде сопла, связанного магистралью с системой подачи воздуха и параллельно соединенного с бесштоковой полостью камеры, разделенной на две полости упругой мембраной, на которой закреплен шток, соединенный с подвижным элементом преобразователя линейных перемещений, который связан с блоком управления.
| МНОГОШПИНДЕЛЬНЫЙ ФРЕЗЕРНЫЙ СТАНОК | 1988 |
|
SU1566600A1 |
| SU 1630144 A1, 27.01.1996 | |||
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ КОНТРОЛЬНЫХ ЛИНИЙ НА ЛЕКАЛА | 1991 |
|
RU2011546C1 |
| МНОГОШПИНДЕЛЬНЫЙ ФРЕЗЕРНЫЙ СТАНОК | 2003 |
|
RU2235004C1 |
| ПЕДЬ Е.И | |||
| и др | |||
| Активный контроль в машиностроении | |||
| -М.: Машиностроение, 1978. | |||

