Изобретение относится к многоконтурным механизмам для передачи одинакового движения и сил на несколько исполнительных органов, в частности к реверсивным механизмам с несколькими выходными поступательно перемещающимися на ограниченные расстояния звеньями, скрепленными с исполнительными органами.
Известен ползунно-рычажный механизм, включающий стойку с двумя направляющими, с каждой из которых введен в подвижное поступательное соединение ползун, с помощью шатуна и шарниров соединенный с другим ползуном (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1981. - С.420, механизм эллипсографа). Механизм состоит из стойки и трех подвижных звеньев: двух ползунов и шатуна.
Недостатки этого механизма следующие. Передача движения и сил с входного ползуна происходит только на один выходной ползун с исполнительным органом на нем. Рабочая зона - место возможных положений исполнительного органа - представляет собой отрезок прямой линии. Шатун при движении первого ползуна в одном направлении работает в тянущем, в другом направлении - в толкающем режиме, что не оптимально с точки зрения изменения при работе направления сил, а, главное, знаков зазоров в шарнирах, т.е. "перекладки" зазоров. Эти недостатки ухудшают работу механизма и сужают область его применения.
Наиболее близким к заявляемому устройству является ползунно-рычажный механизм, включающий стойку с направляющими, с каждой из которых введен в подвижное поступательное соединение ползун, последовательно с помощью шатунов и шарниров соединенный с предыдущим и последующим ползунами (Коловский М.З., Евграфов А.Н., Семенов Ю.А., Слоущ А.В. Теория механизмов и машин. - М.: Издательский центр «Академия», 2006. - С.23, рис.1.16в). Указанный механизм образован из механизма эллипсографа путем последовательного присоединения нескольких шатунно-ползунных структурных групп Л.В.Ассура - таким способом образована открытая кинематическая цепь «ползун - шатун - ползун - шатун - ползун - и т.д.».
Такое выполнение механизма - механизма с шестью, восемью и т.д. звеньями - имеет два, три и т.д. выходных звена с исполнительными органами. Недостатки этого механизма следующие. Передача движения и сил с входного ползуна на остальные ползуны в кинематической цепи, скрепленные с исполнительными органами, происходит с постепенным уменьшением силы на каждом последующем исполнительном органе. Отрезки прямой, представляющие собой рабочие зоны исполнительных органов, не связаны между собой поворотной симметрией. Кроме того, у этого механизма не устранен недостаток, заключающийся в неблагоприятном или толкающем, или тянущем режиме передачи сил через шатуны. Эти недостатки ухудшают работу механизма и сужают область его применения.
Задачей заявляемого изобретения является расширение области применения механизма благодаря соединению всех звеньев механизма в виде замкнутой кинематической цепи.
Решение указанной задачи достигается тем, что в ползунно-рычажном механизме, включающем стойку с направляющими, с каждой из которых введен в подвижное поступательное соединение ползун, последовательно с помощью шатунов и шарниров соединенный с предыдущим и последующим ползунами, направляющие расположены так, что образуют многоугольник, а ползуны с шатунами - замкнутую кинематическую цепь, при этом каждый шатун выполнен состоящим из двух подпружиненных частей, введенных друг с другом в подвижное поступательное соединение с регулируемым ограничителем на одной из них.
Новым по сравнению с прототипом в предложенном устройстве являются:
- новые конструктивные элементы:
пружины, подпружинивающие одну часть каждого шатуна относительно другой;
- новое выполнение конструктивных элементов:
каждый шатун выполнен состоящим из двух подпружиненных частей, введенных друг с другом в подвижное поступательное соединение с регулируемым ограничителем на одной из них;
- новое взаимное расположение элементов:
направляющие расположены так, что образуют многоугольник;
ползуны с шатунами расположены так, что образуют замкнутую кинематическую цепь.
Таким образом, по мнению авторов, предложение является новым по сравнению с прототипом, так как оно не известно из уровня техники. Предложение, по мнению авторов, имеет изобретательский уровень, так как оно для специалистов явным образом не следует из уровня техники и не может быть разработано с использованием известных методов, методик, правил и приемов расчета, проектирования и конструирования машин и их механизмов.
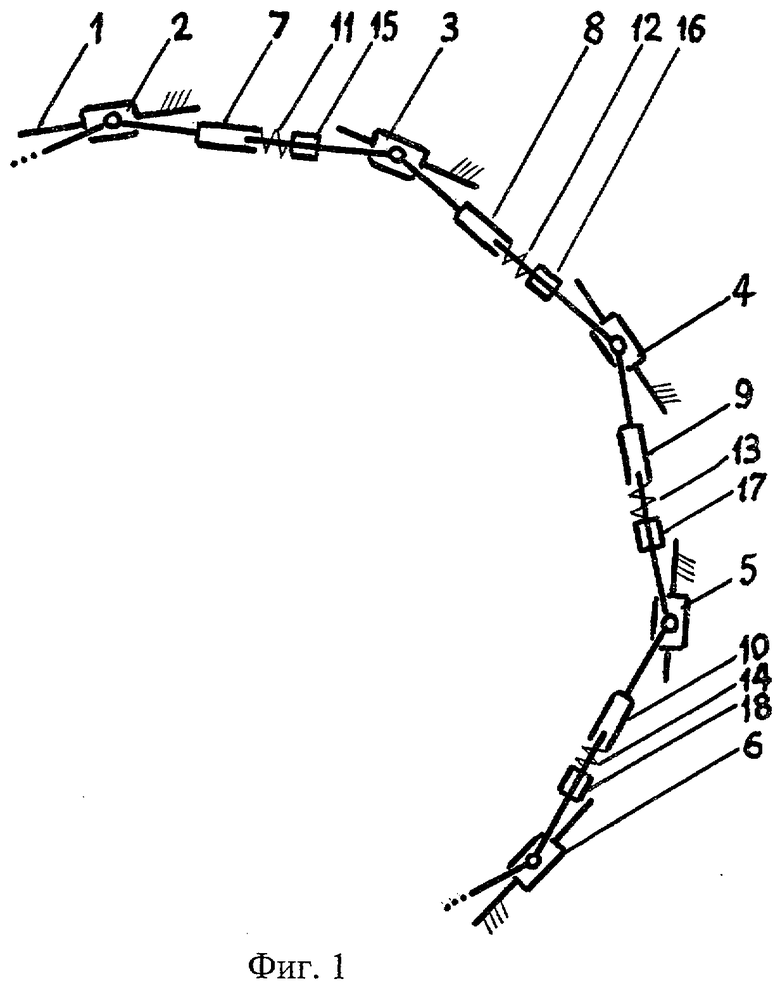
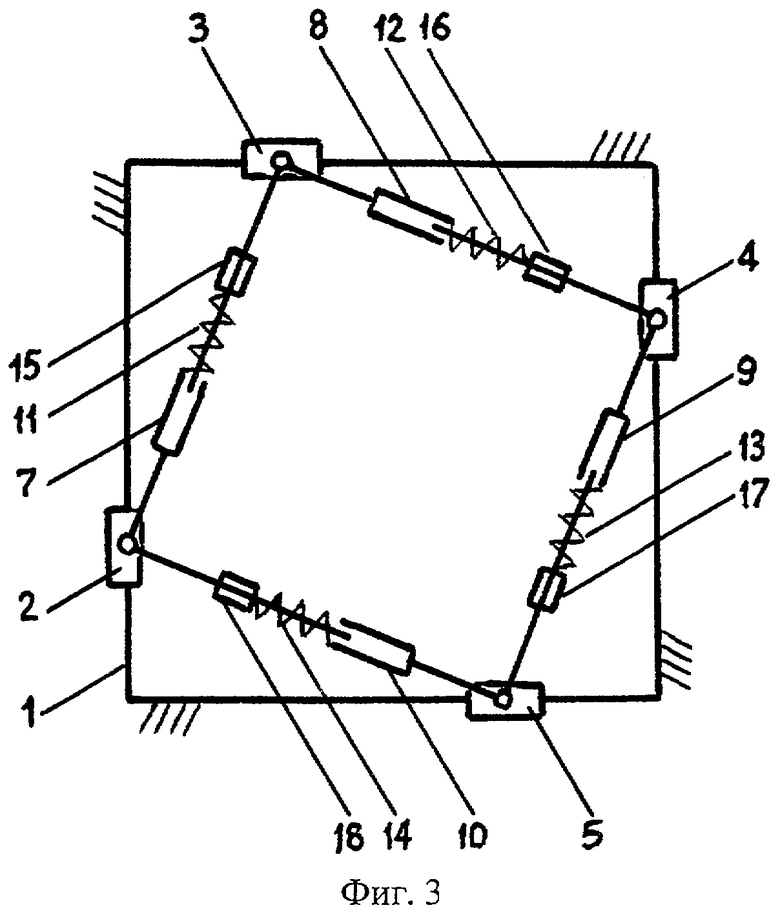
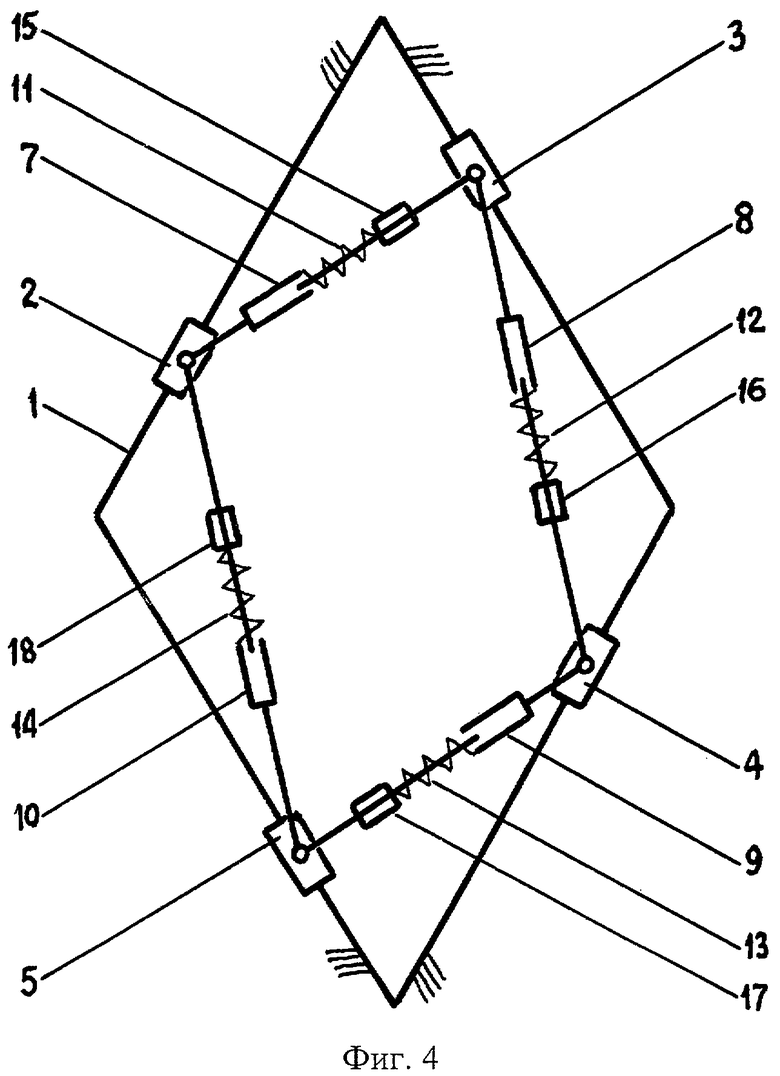
Предложенное техническое решение иллюстрируется схемами, где на фиг.1 представлена структурная схема общего случая ползунно-рычажного механизма, на фиг.2 - то же, с направляющими, образующими треугольник, на фиг.3 - то же, с направляющими, образующими квадрат, на фиг.4 - то же, с направляющими, образующими ромб.
Согласно предложению (фиг.1…4) ползунно-рычажный механизм содержит стойку 1 с направляющими, единственную в механизме. Направляющие образуют: на фиг.1 - многоугольник с нефиксированным количеством сторон, на фиг.2 - треугольник, на фиг.3 - квадрат, на фиг.4 - ромб. Многоугольник, в частности, может быть равносторонним или неравносторонним. В состав механизма входят также ползуны 2, 3, 4, 5, 6, поступательно перемещающиеся по направляющим, двухвершинные шатуны 7, 8, 9, 10, которые введены своими вершинами в подвижные соединения с ползунами 2, 3, 4, 5, 6, пружины 11, 12, 13, 14 и регулируемые ограничители 15, 16, 17, 18. Каждый шатун 7, 8, 9, 10 выполнен из двух частей, введенных в поступательное подвижное соединение друг с другом вдоль своих продольных осей, причем одна из частей подпружинена с помощью пружины 11, 12, 13, 14 относительно другой. Регулируемые ограничители 15, 16, 17, 18 выполнены одной из известных конструкций, например, как гайки, навернутые на резьбу на соответствующих частях шатунов 7, 8, 9, 10. Ползуны 2, 3, 4, 5, 6 и шатуны 7, 8, 9, 10 образуют замкнутую кинематическую цепь.
Предложенный механизм работает следующим образом. Вначале в соответствии с количеством обрабатываемых механизмом объектов или количеством обрабатываемых мест на одном или нескольких объектах, в соответствии с их размерами и местами расположения назначают количество сторон многоугольника и его размеры, формируя требуемую рабочую зону механизма. На сторонах многоугольника размещают направляющие, которые в совокупности образуют стойку 1. В подвижные поступательные соединения с направляющими вводят ползуны 2, 3, 4, 5, 6 с исполнительными органами на них, устанавливая каждый ползун 2, 3, 4, 5, 6 на направляющих, например посередине их. Затем, поставив регулируемые ограничители 15, 16, 17, 18 в положение, при котором пружины 11, 12, 13, 14 не сжаты, подбирают одинаковые размеры шатунов 7, 8, 9, 10, обеспечивающие указанное требуемое положение ползунов 2, 3, 4, 5, 6 на направляющих. Соседние ползуны 2, 3, 4, 5, 6 попарно соединяются шатунами 7, 8, 9, 10 с помощью подвижных шарнирных соединений - в результате формируется замкнутая кинематическая цепь из ползунов 2, 3, 4, 5, 6 и шатунов 7, 8, 9, 10. С помощью регулируемых ограничителей 15, 16, 17, 18, исходя из требуемых расчетных или экспериментально найденных величин хода ползунов 2, 3, 4, 5, 6 и силы сопротивления их перемещению, осуществляют расчетные или экспериментально найденные величины предварительного сжатия пружин 11, 12, 13, 14. После этого с помощью источника движения приводят в движение входной ползун 2 и через шатуны 7, 8, 9, 10 передают движение и силы на ползуны 3, 4, 5, 6 с исполнительными органами, перемещающимися одинаково и выполняющими требуемое воздействие на несколько объектов или на один объект в нескольких его местах. При этом деформируются пружины 11, 12, 13, 14, смещаются подвижные части шатунов 7, 8, 9, 10 относительно друг друга, изменяя длины шатунов 7, 8, 9, 10, и обеспечивается замкнутость кинематической цепи механизма. После этого осуществляют реверсирование. Указанную передачу движения и сил в связи с замкнутостью кинематической цепи механизма осуществляют в толкающе-тянущем режиме, что улучшает работу механизма. При размещении направляющих на сторонах многоугольника, как уже упоминалось, обеспечивается требуемая конфигурация рабочей зоны механизма, определяемая количеством сторон многоугольника и их длинами (на фиг.1 - многоугольная конфигурация, на фиг.2 - треугольная равносторонняя конфигурация, на фиг.3 - квадратная конфигурация, на фиг.4 - ромбовидная конфигурация), причем рабочие зоны отдельных исполнительных органов представляют собой отрезки прямой одинаковой длины, лежащие на сторонах многоугольника с соблюдением принципа поворотной симметрии. Необходимо отметить также, что при реализации ползунно-рычажного механизма по предлагаемой схеме в виде замкнутой кинематической цепи обеспечивается лучшая передача сил на исполнительные органы.
Таким образом, заявляемое изобретение расширяет область применения ползунно-рычажного механизма, обеспечивая передачу движения и сил по толкающе-тянущему принципу с одного входного звена одновременно на несколько выходных звеньев.
Изготовлен опытный образец ползунно-рычажного механизма, при испытаниях он показал свою работоспособность и возможность достижения технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЫЧАЖНЫЙ МЕХАНИЗМ | 2009 |
|
RU2390673C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| ШАРНИРНЫЙ ВИБРОУДАРНЫЙ МЕХАНИЗМ | 2022 |
|
RU2783900C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2011 |
|
RU2478473C1 |
| Шарнирно-рычажный механизм с регулируемой длиной звеньев | 2017 |
|
RU2655120C1 |
| РЫЧАЖНЫЙ ПЯТИЗВЕННЫЙ МЕХАНИЗМ | 2020 |
|
RU2751011C1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2760516C1 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1803654A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2013 |
|
RU2548087C1 |
| СКЛАДЫВАЮЩИЙСЯ МНОГОКРАТНЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ | 2023 |
|
RU2810882C1 |
Изобретение относится к многоконтурным механизмам для передачи одинакового движения и сил на несколько исполнительных органов. Ползунно-рычажный механизм содержит стойку с направляющими, расположенными так, что образуется многоугольник. С каждой из направляющих в подвижное поступательное соединение введен ползун. Каждый предыдущий и последующий ползун соединены при помощи шарниров и шатунов, образуя замкнутую кинематическую цепь. При этом каждый шатун выполнен состоящим из двух подпружиненных частей, введенных друг с другом в подвижное поступательное соединение, с регулируемым ограничителем на одной из них. Решение направлено на расширение области применения механизма путем передачи движения с одного входного звена на несколько выходных звеньев. 4 ил.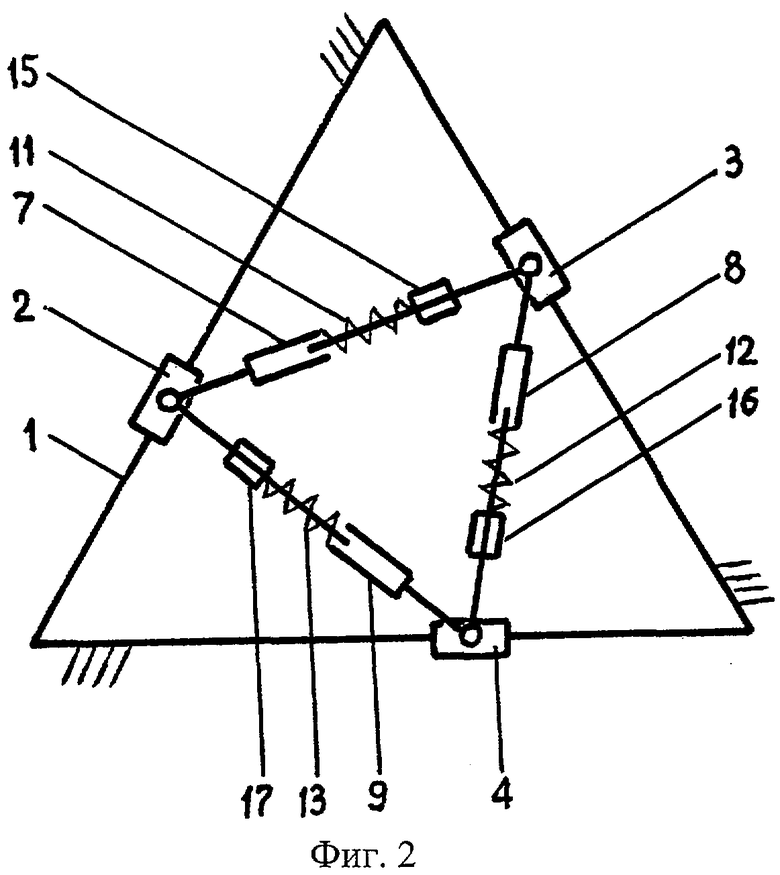
Ползунно-рычажный механизм, включающий стойку с направляющими, с каждой из которых введен в подвижное поступательное соединение ползун, последовательно с помощью шатунов и шарниров соединенный с предыдущим и последующим ползунами, отличающийся тем, что направляющие расположены так, что образуют многоугольник, а ползуны с шатунами - замкнутую кинематическую цепь, при этом каждый шатун выполнен состоящим из двух подпружиненных частей, введенных друг с другом в подвижное поступательное соединение с регулируемым ограничителем на одной из них.
| WO 2004096905 А2, 11.11.2004 | |||
| РЫЧАЖНЫЙ МЕХАНИЗМ ПРЕССА | 2008 |
|
RU2378118C1 |
| RU 2003110380 A, 10.11.2004 | |||
| СПОСОБ ПОЛУЧЕНИЯ НИЗКООСНОВНЫХ АНИОНИТОВ | 0 |
|
SU328136A1 |

