Изобретение относится к устройствам для передачи и преобразования движения и сил, в частности к механизмам с несколькими выходными звеньями, скрепленными с исполнительными органами.
Известен рычажный механизм, включающий стойку с тремя вершинами, три кривошипа с пристоечной и нестоечной вершинами, введенные каждый своей пристоечной вершиной в подвижное шарнирное соединение с одной из стоечных вершин, и трехвершинный шатун с промежуточной и двумя крайними вершинами, введенными в подвижное шарнирное соединение с нестоечными вершинами кривошипов, образуя два параллелограммных замкнутых на стойку контура; контуры эти последовательные (Кожевников С.Н. Теория механизмов и машин. - Киев: Машгиз, 1954. - С.109, 110, фиг.21). Здесь и далее вершиной звена называется сопрягаемый элемент звена - совокупность поверхностей звена, по которым оно может соприкасаться с соответствующими поверхностями на другом звене, образуя подвижное соединение - кинематическую пару, сопряжение. Другими словами, вершина - это место на звене, подготовленное для введения в подвижное соединение с соответствующим местом на другом звене. Пристоечным звеном называется звено, входящее в подвижное соединение, кинематическую пару, сопряжение со стойкой. Стоечными и нестоечными вершинами называются вершины звена, образующие подвижные соединения, кинематические пары, сопряжения соответственно со стойкой и с подвижным звеном.
Указанный механизм - механизм спарника - обладает недостатками, заключающимися в том, что он передает движение и силы с первого кривошипа только на два других кривошипа с исполнительным органом на каждом при расположении осей их вращения на прямой линии. Общий для трех кривошипов шатун напряжен при работе в зонах нестоечных шарниров и попеременно работает то в тянущем, то в толкающем режиме. Это не оптимально с точки зрения изменения при работе направления сил, а главное - знаков зазоров в шарнирах, т.е. перекладки зазоров. Рабочая зона - место возможных положений точек звеньев - у этого механизма только прямоугольник со скругленными двумя противоположными сторонами. Для сборки этого механизма без затруднений и его нормальной работы требуется, кроме параллельности и неперекошенности осей шарниров и неперекошенности звеньев, реализовать обязательное равенство длин всех трех кривошипов и одинаковость расстояний между шарнирами соединения шатуна и кривошипов и расстояний между соответствующими стоечными шарнирами. Переход механизма через крайние положения здесь затруднен. Все это усложняет и удорожает механизм и сужает область его применения.
Наиболее близким к заявляемому устройству (прототипом) является рычажный механизм, включающий стойку с двумя вершинами, два одинаковых кривошипа, каждый из которых выполнен с пристоечной вершиной и двумя нестоечными вершинами и введен пристоечной вершиной в подвижное шарнирное соединение с одной из стоечных вершин, и два двухвершинных шатуна, введенных вершинами в подвижные шарнирные соединения с нестоечными вершинами кривошипов, образуя два параллелограммных замкнутых на стойку контура; контуры эти зеркально симметричны относительно линии, проходящей через центры стоечных шарниров, потому что нестоечные вершины кривошипов выполнены, в частности, разнесенными, а сами кривошипы имеют форму прямолинейных двуплечих рычагов, на концах которых эти нестоечные вершины и размещены (Добровольский В.В. Теория механизмов. - М.: Машгиз, 1953. - С.61, рис.46).
Такое выполнение механизма - механизма спарника - лучше обеспечивает переход им крайних положений. Оба шатуна здесь толкающе-тянущие, что обеспечивает лучшую передачу сил и отсутствие перекладки зазоров. Однако и у этого механизма имеются недостатки. Движение и силы здесь, в лучшем случае, передаются лишь на один кривошип с исполнительным органом. Рабочая зона и у этого механизма является прямоугольником со скругленными сторонами, оси вращения кривошипов с исполнительными органами располагаются на прямой линии. Для сборки этого механизма без затруднений и его нормальной работы, кроме всего прочего, требуется обеспечивать обязательное равенство длин обоих шатунов и равенство длины шатунов и расстояния между стоечными шарнирами. Эти условия сужают область применения этого механизма из-за ограниченности рабочей зоны и количества исполнительных органов.
Задачей, на решение которой направлено изобретение, является расширение области применения механизма за счет обеспечения возможности передачи движения и сил по толкающе-тянущему принципу с одного входного звена одновременно на более чем два выходных звена с исполнительным органом на каждом, оси которых расположены в вершинах различных многоугольников.
Технический результат достигается за счет того, что рычажный механизм, включающий стойку с двумя вершинами, два одинаковых кривошипа, каждый из которых выполнен с пристоечной и двумя нестоечными вершинами и введен пристоечной вершиной в подвижное шарнирное соединение с одной из стоечных вершин, и два двухвершинных шатуна, введенных вершинами в подвижные шарнирные соединения с нестоечными вершинами кривошипов, образуя два параллелограммных замкнутых на стойку контура, снабжен дополнительными стоечными вершинами, которые размещены в вершинах многоугольника, а также дополнительными трехвершинными кривошипами, введенными пристоечными вершинами в дополнительные подвижные шарнирные соединения с дополнительными стоечными вершинами, и дополнительными двухвершинными шатунами, своими вершинами введенными в дополнительные подвижные шарнирные соединения с одноименными нестоечными вершинами на предыдущих и последующих кривошипах так, что дополнительные шарнирно соединенные звенья образуют дополнительные последовательные параллелограммные двухкривошипные замкнутые на стойку контуры в количестве, равном количеству сторон многоугольника, равном же количеству и кривошипов, и шатунов, причем длина каждого шатуна выполнена равной длине соответствующей стороны многоугольника, равной же расстоянию между соответствующими соседними стоечными шарнирами, при этом основные и дополнительные кривошипы и шатуны закольцованы так, что второй кривошип последнего дополнительного замкнутого на стойку контура совпадает с первым кривошипом первого замкнутого на стойку контура.
Новым по сравнению с прототипом в предложенном устройстве являются:
- новые конструктивные элементы:
- дополнительные стоечные вершины;
- дополнительные кривошипы; дополнительные шатуны;
- новые связи между элементами:
дополнительные кривошипы введены пристоечными вершинами в дополнительные подвижные шарнирные соединения с дополнительными стоечными вершинами;
дополнительные шатуны своими вершинами введены в дополнительные подвижные шарнирные соединения с нестоечными вершинами на предыдущих и последующих кривошипах так, что образуют дополнительные последовательные параллелограммные двухкривошипные замкнутые на стойку контуры;
- новое взаимное расположение элементов:
основные и дополнительные стоечные вершины размещены в вершинах многоугольника;
основные и дополнительные кривошипы и шатуны закольцованы так, что второй кривошип последнего дополнительного замкнутого на стойку контура совпадает с первым кривошипом первого замкнутого на стойку контура;
- новые параметры и другие характеристики элементов и их взаимосвязь:
количество дополнительных последовательных параллелограммных замкнутых на стойку контуров равно количеству сторон многоугольника, равному же количеству и кривошипов, и шатунов;
каждый шатун выполнен с длиной, равной длине соответствующей стороны многоугольника, равной же расстоянию между соответствующими соседними стоечными шарнирами.
Таким образом, по мнению авторов, предложение является новым по сравнению с прототипом, так как оно неизвестно из уровня техники.
Предложение, по мнению авторов, имеет изобретательский уровень, так как оно для специалистов явным образом не следует из уровня техники и не может быть разработано с использованием известных методов, методик, правил и приемов расчета, проектирования и конструирования машин и их механизмов.
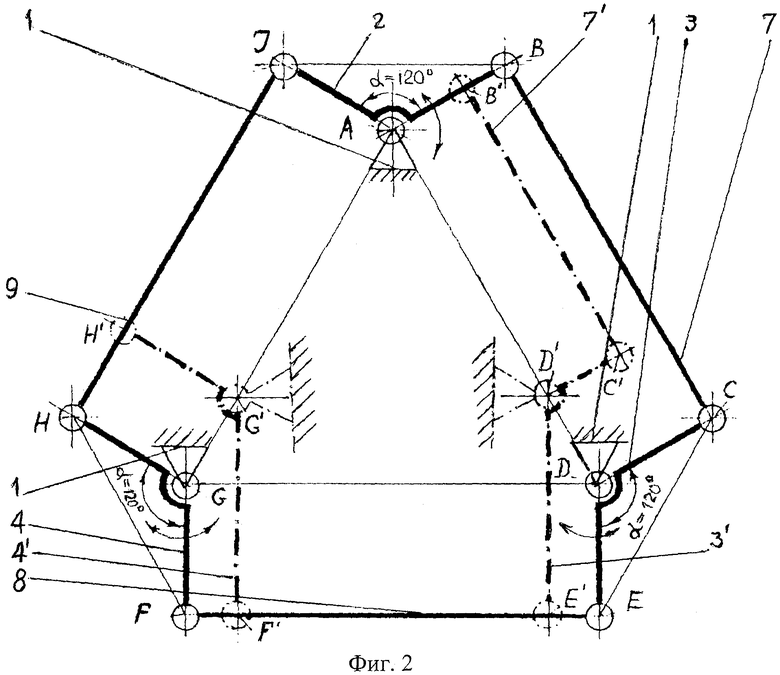
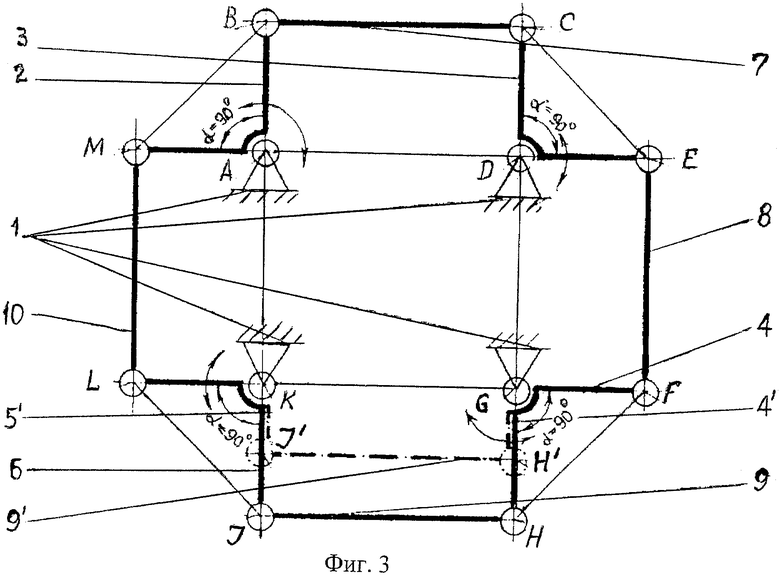
Предложенное техническое решение иллюстрируется схемами, где на фиг.1 представлена структурная схема общего случая рычажного механизма с разнесенными по вершинам треугольника нестоечными вершинами на двуплечих кривошипах; на фиг.2 - то же, со стоечными шарнирами, размещенными в вершинах треугольника; на фиг.3 - то же, в вершинах четырехугольника.
Согласно предложению (фиг.1-3) рычажный механизм включает стойку 1, единственную в механизме, с вершинами в точках A, D, G, К, N. Все стоечные вершины размещены в вершинах многоугольника: на фиг.1 - с нефиксированным количеством сторон, на фиг.2 - треугольника, на фиг.3 - четырехугольника. Многоугольник, в частности, может быть равносторонним или неравносторонним. Стойка в соответствии со стандартами обозначена только в местах ее вершин и образованных с их помощью подвижных соединений стойки с другими звеньями. В состав механизма входят также одинаковые кривошипы 2, 3, 4, 5, 6, каждый из которых выполнен с тремя вершинами. Пристоечными вершинами A, D, G, К, N кривошипы введены в подвижные шарнирные соединения со стойкой. Центры этих шарниров расположены в точках A, D, G, К, N (на фиг.1 количество дополнительных кривошипов нефиксированное, на фиг.2 - один дополнительный кривошип 4, на фиг.3 - два дополнительных кривошипа 4 и 5). Кроме того, механизм включает двухвершинные шатуны 7, 8, 9, 10, которые введены своими вершинами в подвижные шарнирные соединения с нестоечными вершинами на плечах кривошипов так, что образуют замкнутые на стойку 1 параллелограммные контуры ABCDA, DEFGD, GHJKG, KLMNK (на фиг.1 количество дополнительных шатунов нефиксированное, на фиг.2 - один дополнительный шатун 9, на фиг.3 - два дополнительных шатуна 9 и 10). Центры шарниров соединения шатунов с кривошипами расположены в точках В, С, Е, F, H, J, L, М. Дополнительные двухвершинные шатуны 9 и 10 своими вершинами введены в дополнительные подвижные шарнирные соединения с одноименными нестоечными вершинами H, L на предыдущих кривошипах 4, 5 и J, М на последующих кривошипах 5, 6 так, что эти дополнительные шарнирно соединенные звенья образуют дополнительные последовательные параллелограммные двухкривошипные замкнутые на стойку 1 контуры GHJKG, KLMNK (дополнительным на фиг.2 является контур GHJAG, на фиг.3 - GHJKG и KLMAK). Общее количество контуров механизма равно количеству сторон многоугольника, равному и количеству кривошипов, и количеству шатунов. Каждый шатун выполнен с длиной, равной длине соответствующей стороны многоугольника, равной же расстоянию между соседними стоечными шарнирами А и D, D и G, G и К, К и N. При этом все основные и дополнительные кривошипы и шатуны закольцованы так, что второй кривошип последнего дополнительного замкнутого на стойку контура (на фиг.2 контура GHJAG, на фиг.3 контура KLMAK) совпадает с первым кривошипом 2 первого замкнутого на стойку контура ABCDA. Штрихпунктирными линиями на фиг.2 и 3 показаны возможные выполнения механизма с разнесенными нестоечными вершинами на кривошипах и неодинаковыми размерами расстояний от них до пристоечной вершины: на фиг.2 AB=CD≠АВ′=С′D′, DE=FG≠D′E′=F′G′, причем GH=JA=G′H′, фиг.3 GH=JK≠GH′=J′K.
Предложенный рычажный механизм работает следующим образом. Вначале в соответствии с количеством обрабатываемых механизмом машины объектов или количеством обрабатываемых мест на одном или нескольких объектах, в соответствии с их размерами и местами расположения назначают количество сторон многоугольника и их размеры, формируя требуемую рабочую зону. В вершинах этого многоугольника, на стойке 1 соответственно координатам осей поворота пристоечных звеньев выполняют стоечные вершины и в каждой их них вводят в шарнирное соединение промежуточные вершины соответствующего количества кривошипов 2, 3, 4, 5, 6 с исполнительными органами на них. Затем нестоечными вершинами эти кривошипы вводят в подвижные шарнирные соединения с вершинами шатунов 7, 8, 9, 10, согласуя их длину с длиной соответствующей стороны многоугольника, равной расстоянию между соответствующими стоечными шарнирами механизма. При этом формируют последовательные параллелограммные двухкривошипные замкнутые на стойку контуры в количестве, равном количеству сторон многоугольника, а также количеству кривошипов и шатунов. В результате формируют кольцо из указанных кривошипов и шатунов, в котором второй по обходу, например, по часовой стрелке кривошип последнего двухкривошипного параллелограммного замкнутого на стойку контура совпадает с первым кривошипом такого же первого контура. Исполнительные органы, в частности, скрепляют со всеми шатунами или некоторыми из них. После этого с помощью источника движения приводят в движение входной кривошип 2 механизма, приводят в действие весь механизм и через шатуны 7, 8, 9, 10 передают движение и силы на кривошипы 3, 4, 5, 6 с исполнительными органами, перемещающимися одинаково и выполняющими требуемое воздействие на несколько объектов окружающей среды или на один объект в нескольких его местах. При скреплении исполнительных органов с шатунами движение и силы передают на них, преобразуя вращение кривошипа 2 в поступательно-поворотное движение этих шатунов, также выполняющих указанные требуемые действия. При размещении стоечных шарниров A, D, G, K, N в вершинах многоугольника, как уже упоминалось, осуществляют работу механизма с требуемой конфигурацией рабочей зоны, определяемой количеством сторон многоугольника и их длинами (на фиг.1 - многоугольной, на фиг.2 - треугольной равносторонней или неравносторонней, на фиг.3 - четырехугольной). В случае неодинакового расположения нестоечных вершин на кривошипах 2, 3, 4, 5, 6, т.е. неодинаковых расстояний от пристоечных до нестоечных вершин, реализуют уточненную конфигурацию и размеры рабочей зоны и разные требуемые скорости исполнительных органов на кривошипах (окружные скорости) и шатунах (линейные и угловые скорости). В случае разнесенных нестоечных вершин, расположенных, например, в вершинах треугольников, как показано на фиг.1-3, реализуется работа механизма с меньшей статической неопределенностью и лучшей передачей сил.
Таким образом, предложение расширяет область применения механизма за счет обеспечения возможности передачи одинакового движения и сил по толкающе-тянущему принципу с одного входного звена одновременно на более чем два выходных звена с исполнительным органом на каждом, а также за счет реализации при снятии некоторых ограничений на соотношения размеров звеньев разных по форме и размерам рабочих зон, у которых стоечные шарниры располагаются не на прямой линии.
Предложенный рычажный механизм выполнен организацией-заявителем. При испытаниях он продемонстрировал свою работоспособность и возможность достижения технического результата. Таким образом, предложение, по мнению авторов, имеет промышленную применимость.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| ПОЛЗУННО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2009 |
|
RU2398990C1 |
| СКЛАДЫВАЮЩИЙСЯ ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2021 |
|
RU2780824C1 |
| СПОСОБ И МЕХАНИЗМ В.И. ПОЖБЕЛКО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВРАЩЕНИЯ С ОСТАНОВКАМИ | 2003 |
|
RU2249133C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| ШАРНИРНЫЙ КРИВОШИПНЫЙ МЕХАНИЗМ | 2020 |
|
RU2740526C1 |
| СКЛАДЫВАЮЩИЙСЯ МНОГОКРАТНЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ | 2023 |
|
RU2810882C1 |
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2011 |
|
RU2478473C1 |
Изобретение относится к устройствам для передачи движения и сил на несколько исполнительных органов. В вершинах многоугольника расположены стойки, с которыми шарнирно соединены кривошипы, а кривошипы шарнирно соединены шатунами. Указанная конструкция образует замкнутые на стойку параллелограммные контуры в количестве, равном количеству сторон многоугольника. Все звенья закольцованы так, что второй кривошип последнего контура совпадает с первым кривошипом первого контура. Решение позволяет расширить область применения механизма за счет обеспечения возможности передачи движения с одного входного звена на несколько выходных звеньев. 3 ил.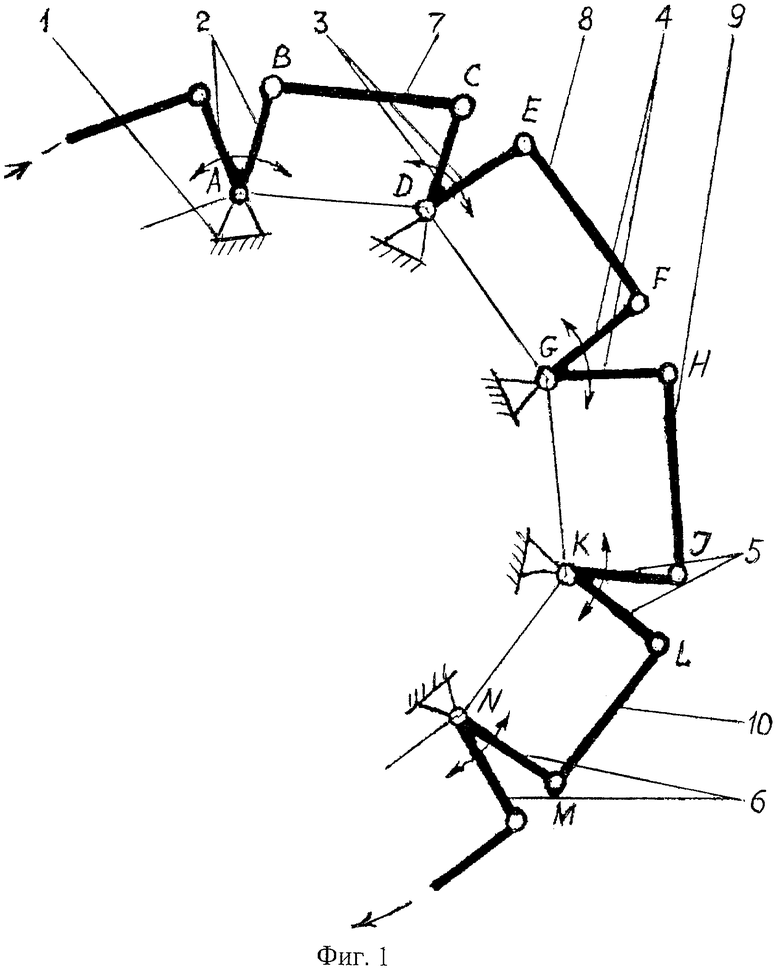
Рычажный механизм, включающий стойку с двумя вершинами, два одинаковых кривошипа, каждый из которых выполнен с пристоечной и двумя нестоечными вершинами и введен пристоечной вершиной в подвижное шарнирное соединение с одной из стоечных вершин, и два шатуна, введенных вершинами в подвижные шарнирные соединения с нестоечными вершинами кривошипов, образуя два параллелограммных замкнутых на стойку контура, отличающийся тем, что он снабжен дополнительными стоечными вершинами, которые размещены в вершинах многоугольника, а также дополнительными кривошипами, введенными пристоечными вершинами в дополнительные подвижные шарнирные соединения с дополнительными стоечными вершинами, и дополнительными шатунами, своими вершинами введенными в дополнительные подвижные шарнирные соединения с одноименными нестоечными вершинами на предыдущих и последующих кривошипах так, что дополнительные шарнирно соединенные звенья образуют дополнительные последовательные параллелограммные двухкривошипные замкнутые на стойку контуры в количестве, равном количеству сторон многоугольника, равном же количеству и кривошипов, и шатунов, причем длина каждого шатуна выполнена равной длине соответствующей стороны многоугольника, равной же расстоянию между соответствующими соседними стоечными шарнирами, при этом основные и дополнительные кривошипы и шатуны закольцованы так, что второй кривошип последнего дополнительного замкнутого на стойку контура совпадает с первым кривошипом первого замкнутого на стойку контура.
| Добровольский В.В | |||
| Теория механизмов | |||
| - М.: Машгиз, 1953, с.61, рис.46 | |||
| Кожевников С.Н | |||
| Теория механизмов и машин | |||
| - Киев: Машгиз, 1954, с.109, 110, фиг.21 | |||
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО | 2003 |
|
RU2246056C1 |

