Изобретение относится к способам адаптивного управления скоростью вращения ротора гидротурбин гидроэлектростанций (ГЭС) и может быть использовано в гидроэнергетике для создания автоматизированных цифровых систем оптимального управления гидроагрегатами с поворотно-лопастной гидротурбиной.
Известен способ управления скоростью вращения ротора поворотно-лопастной гидротурбины, заключающийся в изменении степени открытия направляющего аппарата и положения лопастей рабочего колеса турбины путем формирования и подачи управляющих воздействий на приводы управления направляющим аппаратом и лопастями рабочего колеса (панель электрооборудования ЭГР-МП-2-1-220-220/50-1-0-ОЗУХЛ4. Руководство по эксплуатации 2266999 РЭ ОАО «Ленинградский металлический завод» 2003).
В известном способе управляющее воздействие на привод управления направляющим аппаратом формируют с помощью регулятора с постоянными параметрами, которые настраивают заранее в процессе пусконаладочных работ с применением линейной модели гидротурбины.
Управляющее воздействие на привод управления лопастями рабочего колеса турбины формируют с помощью комбинатора по заранее определенной комбинаторной зависимости, одинаковой для всех гидротурбин одного типа, установленных на многоагрегатной ГЭС. Комбинаторную зависимость определяют по результатам экспериментальных исследований макета поворотно-лопастной гидротурбины и уточняют при натурных испытаниях головного образца в условиях эксплуатации на данной ГЭС. Этот способ управления скоростью вращения ротора гидротурбины используют в существующих системах автоматического управления гидроагрегатами ГЭС России.
Но при этом данный способ не учитывает то, что каждая гидротурбина имеет индивидуальные отличительные особенности, влияющие на выбор оптимальных управляющих воздействий. К этим отличительным особенностям относятся:
- нелинейная зависимость скорости вращения ротора гидротурбины от управляющих воздействий и напора воды;
- существенные отличия размеров водоводных трактов различных гидроагрегатов, даже если они находятся в пределах допуска строительных норм, заданных в относительных единицах;
- различия в зазорах между лопастями рабочего колеса и камерой;
- наличие расхождений между расчетными и фактическими значениями степени открытия направляющего аппарата и положения лопастей рабочего колеса;
- различия по профилю и размерам лопастей рабочего колеса.
Поэтому каждая гидротурбина поддерживает заданную скорость вращения ротора с большими значениями статической и динамической погрешностей регулирования.
В качестве прототипа принят способ адаптивной коррекции комбинаторной зависимости поворотно-лопастной гидротурбины (патент на изобретение RU 2302551 С2, МПК F03B 15/00, опубликовано 10.07.2007, бюл. №19).
В этом способе вначале выявляют наличие несоответствия оптимальным параметрам регулирования турбины, полученным по комбинаторной зависимости, а затем выводят комбинаторную зависимость из работы, определяют направление коррекции и производят поиск оптимальных параметров, при котором прирост расхода воды с изменением положения лопастей рабочего колеса был бы равен приросту расхода воды при изменении открытия направляющего аппарата, для чего формируют пробные импульсные воздействия, производя их одновременно, но в противоположных направлениях, группируя их по парам, и ступенчато подают их на приводы управления лопастями рабочего колеса и направляющего аппарата, измеряя приращение электрической мощности агрегата, при этом в качестве признака для выбора корректирующей пары импульсов используют положительный прирост электрической мощности, причем коррекцию продолжают до момента, когда приращение мощности агрегата станет равным нулю, при этом параметры регулирования накапливают в блоке памяти для последующего использования их в качестве оптимальных при возникновении режима агрегата, соответствующего по напору и мощности.
Прототип имеет следующие недостатки.
Оптимальные параметры комбинаторной зависимости определяют в специальном режиме работы гидротурбины с выведенной из работы комбинаторной зависимостью, в котором на приводы управления подают пробные импульсные воздействия.
Кроме того, в процессе коррекции комбинаторной зависимости на приводы управления подают пробные импульсные воздействия, направленные вначале на увеличение, а затем на уменьшение управляющих воздействий (или наоборот), из-за чего происходит повышенный уровень вибрации и износ подвижных узлов турбины и приводов управления, при коррекции комбинаторной зависимости не учитывают уровень вибрации гидротурбины, что приводит к уменьшению периода работы гидротурбины между ремонтами и периода эксплуатации гидротурбины в целом.
Изобретение решает задачу автоматизированного оптимального управления скоростью вращения ротора поворотно-лопастной гидротурбины с заданным быстродействием при минимальной вибрации, с учетом допустимых отклонений, предусмотренных заводскими характеристиками.
Техническим результатом является оптимальное управление скоростью вращения ротора гидротурбины с заданными быстродействием и точностью и с учетом влияния возмущающих воздействий, при минимальной вибрации, а в результате - увеличение межремонтных интервалов и повышение срока службы гидротурбины в целом за счет снижения уровня вибрации.
Поставленный технический результат достигается в способе адаптивного управления скоростью вращения ротора поворотно-лопастной гидротурбины, заключающемся в формировании воздействий на приводы управления лопастями рабочего колеса и направляющим аппаратом с использованием комбинаторной зависимости, в изменении положения лопастей рабочего колеса и открытия направляющего аппарата путем подачи воздействий на приводы управления лопастями рабочего колеса и направляющим аппаратом при заданных параметрах регулирования турбины, в коррекции комбинаторной зависимости от наличия несоответствия между требуемыми и измеренными параметрами регулирования, при этом вначале на первом шаге формируют в адаптивном регуляторе с первоначально настроенными параметрами и комбинаторе управляющие воздействия и подают их на приводы управления лопастями рабочего колеса и направляющим аппаратом, а также в обучаемую модель гидротурбины, состоящую из математических моделей объекта управления, комбинатора и адаптивного регулятора, после этого изменяют положения лопастей рабочего колеса и степень открытия направляющего аппарата при заданных параметрах регулирования гидротурбины, а именно: скорости вращения ротора гидротурбины, уровня вибрации и напора воды, далее измеряют значения положения лопастей рабочего колеса, степени открытия направляющего аппарата, скорости вращения ротора гидротурбины, уровня вибрации и напора воды и определяют сигнал рассогласования между измеренными и требуемыми значениями параметров регулирования, который используют в адаптивном регуляторе, одновременно измеренные значения параметров регулирования подают в обучаемую модель гидротурбины, с помощью обучаемой модели рассчитывают по управляющим воздействиям прогнозируемые значения параметров регулирования и определяют сигнал рассогласования между прогнозируемыми и измеренными значениями параметров регулирования, далее с помощью этого сигнала рассогласования по рекуррентному алгоритму оптимального управления, минимизируя функционал обобщенной работы с помощью принципа максимума находят уточненные значения параметров обучаемой модели, которые используют для коррекции комбинаторной зависимости, а также в качестве настраиваемых параметров адаптивного регулятора на следующем шаге процесса управления.
Сущность изобретения состоит в уточнении на каждом шаге процесса управления параметров адаптивного регулятора и коррекции комбинаторной зависимости с помощью найденных на предыдущем шаге процесса управления параметров обучаемой модели, состоящей из математических моделей объекта управления, комбинатора и адаптивного регулятора. Параметры обучаемой модели, а именно: скорость вращения ротора гидротурбины, уровень вибрации, степень открытия направляющего аппарата, положение лопастей рабочего колеса, находят с помощью сигнала рассогласования между измеренными и прогнозируемыми моделью значениями параметров регулирования по рекуррентному алгоритму оптимального управления путем минимизации функционала обобщенной работы с помощью принципа максимума. Уточненные параметры адаптивного регулятора и откорректированная комбинаторная зависимость обеспечивают оптимальное управление гидротурбиной при минимальном уровне вибрации с учетом допустимых отклонений, предусмотренных заводскими характеристиками, что позволяет увеличить межремонтные интервалы и срок эксплуатации гидротурбины в целом.
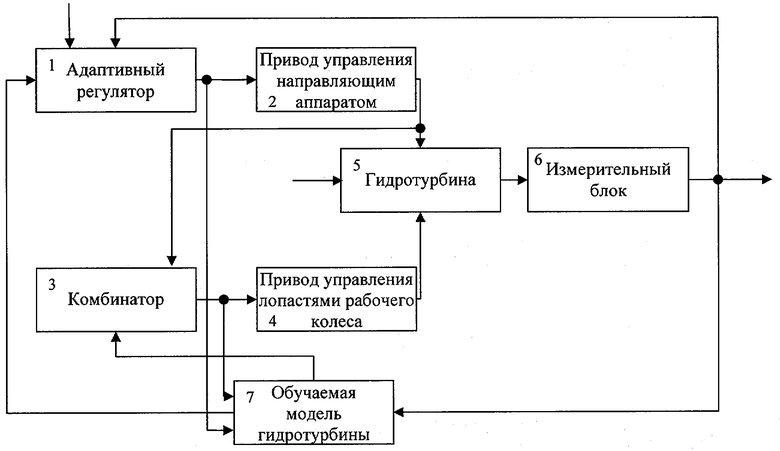
На чертеже показана блок-схема адаптивной системы управления скоростью вращения ротора поворотно-лопастной гидротурбины, объясняющая принцип действия способа управления, состоящая из адаптивного регулятора 1 с настраиваемыми параметрами для формирования управляющего воздействия на привод управления направляющим аппаратом 2, комбинатора 3 для формирования управляющего воздействия на привод управления лопастями рабочего колеса 4 по комбинаторной зависимости, привода управления направляющим аппаратом 2, привода управления лопатками рабочего колеса 4, гидротурбины 5, измерительного блока 6 для измерения параметров регулирования гидротурбиной 5, обучаемой модели 7 для расчета значений параметров адаптивного регулятора 1 и коррекции комбинаторной зависимости.
Способ осуществляется следующим образом. Все время управления разделяется на отдельные интервалы - шаги квантования по времени. На первом шаге в адаптивном регуляторе 1 с первоначально настроенными параметрами формируют и подают управляющее воздействие на привод управления направляющим аппаратом 2 - Uy(t). Далее, используя комбинаторную зависимость, заранее определенную (например, полученную при испытаниях головного образца партии), формируют и подают управляющее воздействие на привод управления лопастями рабочего колеса 4 - Uφ(t). Сформированные управляющие воздействия также подают в обучаемую модель 7 гидротурбины 5.
После этого измеряют значения положения лопастей рабочего колеса, степени открытия направляющего аппарата, уровня вибрации, скорости вращения ротора гидротурбины 5, напора воды. На измеренные значения этих параметров регулирования оказывают влияние внешние неконтролируемые возмущающие воздействия, обозначенные как w(t). После этого измеренные значения параметров регулирования подают в адаптивный регулятор 1, куда также подают требуемые значения параметров регулирования, заданные в виде опорных траекторий. Далее находят сигнал рассогласования между измеренными и требуемыми значениями параметров регулирования, которые используют в адаптивном регуляторе 1.
Настройку адаптивного регулятора 1 осуществляют с помощью обучаемой модели 7 гидротурбины 5. В обучаемой модели 7 с начальными параметрами, куда поданы управляющие воздействия, вычисляют прогнозируемые значения параметров гидротурбины 5, такие как: положение лопастей рабочего колеса, открытие лопаток направляющего аппарата, уровень вибрации, скорость вращения ротора гидротурбины 5. После этого находят сигнал рассогласования между прогнозируемыми и измеренными параметрами. Далее этот сигнал рассогласования используют для нахождения уточненных параметров обучаемой модели 7 в рекуррентном алгоритме оптимального управления, в котором минимизируют функционал обобщенной работы (Красовский А.А. Оптимальные алгоритмы в задачах идентификации с адаптивной моделью // АиТ. 1975 №12 с.75-82.):

с помощью принципа максимума (Фомин В.Н., Фрадков А.Л., Якубович В.А. Адаптивное управление динамическими объектами. М.: Наука, 1981, 384 с.), с учетом уравнений обучаемой модели 7 и ограничений, предусмотренных заводскими характеристиками,
где N(t) - скорость вращения ротора гидротурбины 5;
nпр(t) - прогнозируемая скорость вращения ротора гидротурбины 5;
y(t) - степень открытия направляющего аппарата;
yпр(t) - прогнозируемая степень открытия направляющего аппарата;
φ(t) - положение лопастей рабочего колеса;
φпр(t) - прогнозируемое положение лопастей рабочего колеса;
z(t) - уровень вибрации;
zпр(t) - прогнозируемый уровень вибрации;
w(t) - вектор возмущающих воздействий;
σN, σφ, σу, σz, σw - нормирующие множители;
α - параметр регуляризации 0<α<1.
Уточненные значения параметров обученной модели 7, которые учитывают внешние возмущающие воздействия, обеспечивают оптимальное управление гидротурбиной 5, при минимальной вибрации. Далее параметры обученной математической модели 7 используют в качестве настраиваемых параметров адаптивного регулятора 1 и с помощью их же корректируют комбинаторную зависимость, которую используют в комбинаторе 3.
После этого процесс управления переводят на следующий шаг и повторяют.
За счет этого предложенный способ позволяет обеспечивать оптимальное управление скоростью вращения ротора гидротурбины с заданными быстродействием и точностью, учесть влияние возмущающих воздействий, уменьшить уровень вибрации гидротурбины с учетом допустимых отклонений, предусмотренных заводскими характеристиками.
Изобретение относится к способам адаптивного управления скоростью вращения ротора гидротурбин гидроэлектростанций (ГЭС) и может быть использовано в гидроэнергетике. Сущность изобретения состоит в уточнении на каждом шаге процесса управления параметров адаптивного регулятора и коррекции комбинаторной зависимости с помощью найденных на предыдущем шаге процесса управления параметров обучаемой модели, состоящей из математических моделей объекта управления, комбинатора и адаптивного регулятора. Скорость вращения ротора гидротурбины, уровень вибрации, степень открытия направляющего аппарата, положение лопастей рабочего колеса находят с помощью сигнала рассогласования между измеренными и прогнозируемыми моделью значениями параметров регулирования по рекуррентному алгоритму оптимального управления путем минимизации функционала обобщенной работы с помощью принципа максимума. Уточненные параметры адаптивного регулятора и откорректированная комбинаторная зависимость обеспечивают оптимальное управление гидротурбиной при минимальном уровне вибрации с учетом допустимых отклонений, предусмотренных заводскими характеристиками. Изобретение направлено на оптимальное управление скоростью вращения ротора гидротурбины с заданными быстродействием и точностью и с учетом влияния возмущающих воздействий, при минимальной вибрации, а в результате - увеличение межремонтных интервалов и повышение срока службы гидротурбины в целом за счет снижения уровня вибрации. 1 ил.
Способ адаптивного управления скоростью вращения ротора поворотно-лопастной гидротурбины, заключающийся в формировании воздействий на приводы управления лопастями рабочего колеса и направляющим аппаратом с использованием комбинаторной зависимости, в изменении положения лопастей рабочего колеса и открытия направляющего аппарата путем подачи воздействий на приводы управления лопастями рабочего колеса и направляющим аппаратом при заданных параметрах регулирования турбины, в коррекции комбинаторной зависимости от наличия несоответствия между требуемыми и измеренными параметрами регулирования, отличающийся тем, что вначале на первом шаге формируют в адаптивном регуляторе с первоначально настроенными параметрами и комбинаторе управляющие воздействия и подают их на приводы управления лопастями рабочего колеса и направляющим аппаратом, а также в обучаемую модель гидротурбины, состоящую из математических моделей объекта управления, комбинатора и адаптивного регулятора, после этого изменяют положения лопастей рабочего колеса и степень открытия направляющего аппарата при заданных параметрах регулирования гидротурбины, а именно скорости вращения ротора гидротурбины, уровня вибрации и напора воды, далее измеряют значения положения лопастей рабочего колеса, степени открытия направляющего аппарата, скорости вращения ротора гидротурбины, уровня вибрации и напора воды и определяют сигнал рассогласования между измеренными и требуемыми значениями параметров регулирования, который используют в адаптивном регуляторе, одновременно измеренные значения параметров регулирования подают в обучаемую модель гидротурбины, с помощью обучаемой модели рассчитывают по управляющим воздействиям прогнозируемые значения параметров регулирования и определяют сигнал рассогласования между прогнозируемыми и измеренными значениями параметров регулирования, далее с помощью этого сигнала рассогласования по рекуррентному алгоритму оптимального управления, минимизируя функционал обобщенной работы с помощью принципа максимума находят уточненные значения параметров обучаемой модели, которые используют для коррекции комбинаторной зависимости, а также в качестве настраиваемых параметров адаптивного регулятора на следующем шаге процесса управления.
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "ПОДЖАРКА С ТУШЕНОЙ КАПУСТОЙ" СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ (ВАРИАНТЫ) | 2005 |
|
RU2301551C1 |
| Способ управления режимом работы энергоагрегата | 1983 |
|
SU1208300A2 |
| Способ определения комбинаторной зависимости поворотно-лопастной гидротурбины | 1982 |
|
SU1078119A1 |
| Способ оптимизации комбинаторной зависимости поворотно-лопастной гидротурбины | 1972 |
|
SU446676A1 |
| US 4754156 А, 28.06.1988 | |||
| JP 60240880 А, 29.11.1985. | |||

