Изобретение относится к peryлированию поворотно-лопастных гидротурбин.
Известны способы оптимизации комбинаторной зависимости поворотно-лопастной гидротурбины с кулачком и роликом комбинатора путем корректирования положения лопастей рабочего колеса и открытия направляющего аппарата до получения максимального к.п.д. Однако реализация этих способов затруднена необходимостью иметь высокоточные датчики и сложную аппаратуру,
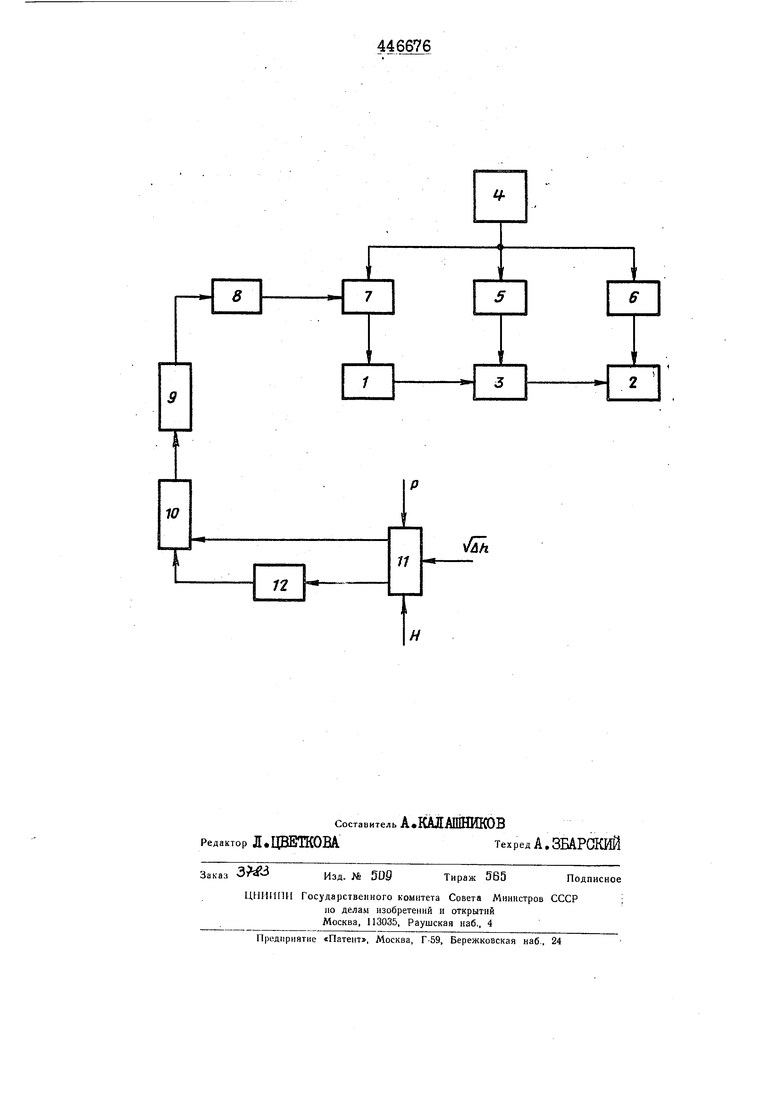
С целью упрощения реализации после достижения мощностью гидротурбины очередного заданного значения отводят ролик комбинатора от кулачка с фиксацией положения лопастей рабочего колеса и ступенями изменяют открывание направляющего аппарата до тех пор, пока к.п.д, при двух соседних открываниях не станут достаточно близкими На чертеже показана схема peализации предлагаемого способа.
При изменении режима гидроагрегата открывание направляющего аппарата I и разворот лопастей рабочего колеса 2 устанавливаются первоначально в положение, соответствующее профилю кулачка комбинатора 3. После установки режима сигналы от датчика мощности 4, определящего, что отработка нового задания мощности завершена, поступают на блок 5 отвода ролика комбинатора от кулачка, на блок 6 фиксации положения лопастей рабочего колеса и с некоторой выдержкой времени, необходимой для выполнения этих операций, - на блок 7, производящий дополнительное изменение открывания направляющего аппарата 1. Управление блоком 7 осуществляется от задатчика 8, формирующего сигнал на изменение открывания направляющего аппарата турбины.
Блоком 7 может служить механизм изменения числа оборотов агрегата, воздействующий на изменение уставки регулятора скорости, а следовательно, и на открывание направляющего аппарата турбины.
Задатчик 8 управляет блоком 7 по разрешающему импульсу от логического элемента 9, на который подают сигналы от сравнивающего устройства 10, где сопоставляются к.п.д, гидроагрегата, на каждом шаге изменения открывания направляющего аппарата, задаваемом задатчиком.
К.п.д. изменяется в блоке И, воспроизводящем функциональную зависимость:
ШГ
где А - ПОСТОЯН1ШЙ множитель;
Р - мощность генератора; л/t- перепад давления в расходомерном створе гидроагрегата;
Н - напор гидроагрегата.
Измерение Р, Н,лЛ производится с помощью датчиков мощности, напора и перепада давления соответственно. В блоке памяти 12 хранится значение КоП.Де гидроагрегата при открывании направляющего аппарата, предшествовавшем изменению его на один шаг.
Если при увеличении открывания направляющего аппарата 1 происходит увеличение к,п.д, то логический элемент 9 формирует импульс на дальнейшее открывание направляющего аппарата. И, наоборот, если при увеличении открывания направляющего аппарата произойдет снижение к.п.д. блока, то формируется импульс на уменьшение открывания направляющего аппарата. Процесс корректирования происходит до тех пор, пока при очередном изменении положения направляющего аппарата к.п.д. практически не изменится, то есть не достигнет своего максимально возможного значения. Соответствующим выбором величины
управляющего сигнала, формируемого
задатчиком 8, точность корректирования положения направляющего аппарата можно сделать сколь угодно высокой.
ПРЕдагТ ИЗОБРЕТЕНИЯ
Способ оптимизации комбинаторной зависимости поворотно-лопастной гидротурбины с кулачком и ро25 ликом комбинатора путем корректирования положения лопастей рабочего колеса и открытия направляющего аппарата до получения максимального к.п.д., отличающийся
30 тем, что, с целью упрощения реализации, после достижения мощностью .гидротурбины очередного заданного значения отводят ролик комбинатора от кулачка с фиксацией положения
35 .лопастей рабочего колеса и ступенями изменяют открывание направляющего аппарата дотех пор, пока , к.ПоД, при двух соседних открвданиях не станут достаточно близкими.
-Ч 2

/Гн.
11
