Изобретение относится к области гидроэнергетики и может быть использовано в системах управления гидроагрегатов, установленных на равнинных реках при малых перепадах уровней, а именно поворотно-лопастных, капсульных и диагональных гидроагрегатов для увеличения годовой выработки энергии и повышения надежности.
Для использования энергетических ресурсов равнинных рек, несущих большое количество воды при малых напорах (перепадах уровней), применяются поворотно-лопастные и капсульные агрегаты. Характерной особенностью турбин этих типов является наличие двух регулирующих органов: лопаток направляющего аппарата, предназначенных для регулирования расхода и закрутки потока перед входом на рабочее колесо (ротор) и расположенных на рабочем колесе лопастей, угол установки которых может изменяться для обеспечения плавного (безударного) входа потока на них и (безвихревого) выхода потока из турбины с минимальной окружной составляющей скорости. Даже незначительные отклонения потока воды в турбине от идеальной траектории и связанные с этим потери в скорости, а следовательно, и напора, могут составлять ощутимую долю от низкого, действующего на ГЭС напора, и приводить к существенному снижению коэффициента полезного действия. Поэтому геометрической организации (взаимному положению лопаток направляющего аппарата и углу установки лопастей) потока при эксплуатации поворотно-лопастных и капсульных турбин уделяется большое внимание. Оптимальное сочетание величины открытия направляющего аппарата и угла установки лопастей рабочего колеса зависит от основного параметра: действующего на агрегат напора нетто, под которым понимается разность полных удельных энергий воды на входе в турбину и выходе из нее [Кривченко Г.И. Гидравлические машины: Турбины и насосы. Изд-во «Энергия», Москва, 1978 г., стр.16]. Обеспечивающая достижение максимального КПД турбины зависимость угла разворота лопастей от открытия направляющего аппарата и напора называется комбинаторной зависимостью. Эта зависимость входит в проектную документацию на турбину и снимается на гидравлическом стенде завода-изготовителя турбины при испытаниях модели турбины [Кривченко Г.И. Гидравлические машины: Турбины и насосы. Изд-во «Энергия», Москва, 1978 г., стр.29, 120-123].
В состав документации по комбинаторной зависимости завод включает также величины мощности, развиваемые турбиной в комбинаторных точках, найденных во время испытаний модели.
Таким образом, существует две исходных зависимости, каждая из которых может быть положена в основу создания, реализующего их комбинаторного механизма.
Во-первых, зависимость угла установки лопастей от величины открытия направляющего аппарата и напора нетто. Эта характеристика задается заводом как однопараметрическое семейство зависимостей угла установки лопастей от открытия при постоянном напоре, который и является параметром.
Известны способы управления лопастями рабочего колеса гидротурбины, при котором угол установки лопастей рабочего колеса определяют как значение нелинейной функции двух переменных от аргументов: величины открытия направляющего аппарата (или положения сервомотора привода лопаток направляющего аппарата) и действующего на турбину напора воды. Этот наиболее распространенный способ управления лопастями рабочего колеса описан во всех учебниках по регулированию гидравлических турбин [Кривченко Г.И. Гидравлические машины: Турбины и насосы. Изд-во «Энергия», Москва, 1978 г., стр.164].
Способ отличается простотой реализации: угол разворота лопастей определяется положением копира, перемещающегося перпендикулярно поверхности конического пространственного кулачка, угол поворота которого задается открытием направляющего аппарата, а перемещение кулачка перпендикулярно плоскости копира осуществляется электродвигателем следящей системы, задающим сигналом для положения вала которой служит электрический сигнал датчика напора. Так как один из параметров настройки – напор не зависит от режима работы турбины, то угол поворота лопастей в динамике определяется только движением направляющего аппарата и настройки привода лопастей, т.е. проектировщиком системы. Особенности динамических характеристик турбины не влияют на поведение комбинаторного механизма, а он, в свою очередь, и не вносит изменений в динамические характеристики турбины как объекта управления мощностью. К недостаткам описанного комбинаторного механизма относится низкая точность установки лопастей, что связано, прежде всего, со сложностями измерения напора нетто на низконапорных станциях. Суммарная погрешность, может составить для низконапорных (напор от 3-25 м) гидроэлектростанций – (-3.8 ± 7.8)%, или в среднем (-5.8)%. [СО 34.21.564-00 (РД 153-34.2-21.564-00) - см., например, http://www.law.rufox.ru/view/energetika/101200032464.htm]
Указанные погрешности измерения напора нетто приводят к нарушению строгого соответствия между открытием направляющего аппарата и углом установки лопастей. Как известно, неточность установки лопастей рабочего колеса сопряжена со снижением коэффициента полезного действия турбины и при приведенной средней величине ошибки это снижение может составить от 0,6% (мощность больше 80% от номинальной) до 1% (мощность 30% - 80% от номинальной).
Подавляющее большинство патентов и авторских свидетельств защищают различные способы электронного формирования комбинаторных зависимостей, использующих задание их как однопараметрическое семейство функциональных зависимостей угла установки лопастей от открытия с параметром «напор нетто».
Во вторых, в основу разработки комбинаторного механизма может быть положена зависимость мощности турбины от открытия направляющего аппарата, при постоянных углах установки лопастей при условии, что регулирующие органы установлены в соответствии с комбинаторной зависимостью, т.е. их взаимное положение обеспечивает достижение максимального КПД. Эта зависимость может быть построена аналогично предыдущей по данным завода как однопараметрическое семейство зависимостей мощности от открытия при постоянном угле установки лопастей, который является параметром. Значение мощности, соответствующее находящимся в комбинаторной связи открытию направляющего аппарата и углу установки лопастей в дальнейшем называется комбинаторной или эталонной мощностью.
Известно техническое решение, описанное в [АС СССР №291583, кл. F03B 15/06, 1977]. В соответствии с описанным способом установку угла лопастей осуществляют по суммарному импульсу от мощности гидроагрегата и открытия направляющего аппарата.
Управление по открытию направляющего аппарата происходит с помощью передачи импульса от сервомотора направляющего аппарата к валу пространственного конического кулачка комбинатора, а управление по мощности - с помощью устройства, замеряющего мощность на шинах генератора и преобразующего электрический сигнал в механическое перемещение кулачка, перпендикулярно его оси вращения.
Серьезными недостатками этого способа управления лопастями по открытию направляющего аппарата и активной мощности генератора являются наличие положительной обратной связи в контуре комбинаторного механизма, обусловленной тем, что мгновенная мощность агрегата зависит от положения лопастей, а их положение, в свою очередь, определяется текущей мощностью, а также потеря устойчивости системы регулирования при отработке больших возмущений. Эти свойства делают применение упомянутого способа управления неприемлемым для практического использования, несмотря на гарантированный выигрыш в годовой выработке энергии агрегатом.
Задачей предлагаемого изобретения является создание способа коррекции характеристики комбинаторного механизма, управляющего углом установки лопастей рабочего колеса и осуществляющего его установку на основе использования сигналов, пропорциональных открытию направляющего аппарата и величине напора нетто, путем корректировки сигнала измеренного напора с целью повышения точности установки угла лопастей рабочего колеса и увеличения тем самым КПД турбины и повышения надежности системы управления.
Другой задачей предлагаемого изобретения является создание устройства, обеспечивающего повышения точности управления углом установки лопастей рабочего колеса регуляторами поворотно-лопастных турбин с комбинаторными механизмами, управляющими углом установки лопастей по величине открытия направляющего аппарата и напору нетто, путем корректировки сигнала напора в зависимости от эталонной мощности турбины и активной электрической мощности генератора.
Поставленная задача решается тем, что в способе управления углом установки лопастей рабочего колеса поворотно-лопастной турбины, включающем использование сигналов датчиков напора и открытия направляющего аппарата, а также использующее эти сигналы средство формирования на основе заводской комбинаторной характеристики задания угла установки лопастей дополнительно используются сигналы датчиков электрической активной мощности генератора и угла установки лопастей, средство формирования сигнала эталонной (комбинаторной) мощности на основе сигналов открытия направляющего аппарата и угла установки лопастей в соответствии с заводской характеристикой, и, если сигнал эталонной мощности отличается от сигнала активной мощности, корректируют измеренный сигнал напора, поступающий на формирователь комбинаторной зависимости, до тех пора, пока мощность турбины не станет равной эталонной мощности.
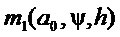
Вторая задача решается тем, что в состав комбинаторного механизма с входами, соединенными с выходами датчика (или устройством задания) открытия направляющего аппарата и датчика напора, и подключенного выходом к входу привода изменения угла установки лопастей, дополнительно включено устройство коррекции угла установки лопастей рабочего колеса, содержащее датчик угла установки лопастей рабочего колеса, датчик активной мощности генератора, преобразователь, формирующий сигнал эталонной мощности, элемент сравнения, интегратор с системой управления интегрированием, сумматор и двухпозиционный перекидной переключатель, при этом выходы датчика (или устройства задания) открытия направляющего аппарата и датчика угла установки лопастей связаны с входами преобразователя, формирующего сигнал эталонной мощности, а его выход и выход датчика активной мощности подключены на входы элемента сравнения, выход которого через интегратор связан с одним из входов сумматора, на второй вход которого подключен выход датчика напора, а выход сумматора связан с контактом перекидного переключателя, другой контакт которого соединен с датчиком напора, а общий контакт подключен к входу комбинаторного механизма вместо выхода датчика напора.
Ниже изобретение иллюстрируется чертежами, на которых:
Фиг.1 изображает структурную схему устройства, реализующего предлагаемый способ повышения точности управления углом установки лопастей рабочего колеса путем коррекции сигнала датчика напора, в соответствии с изобретением;
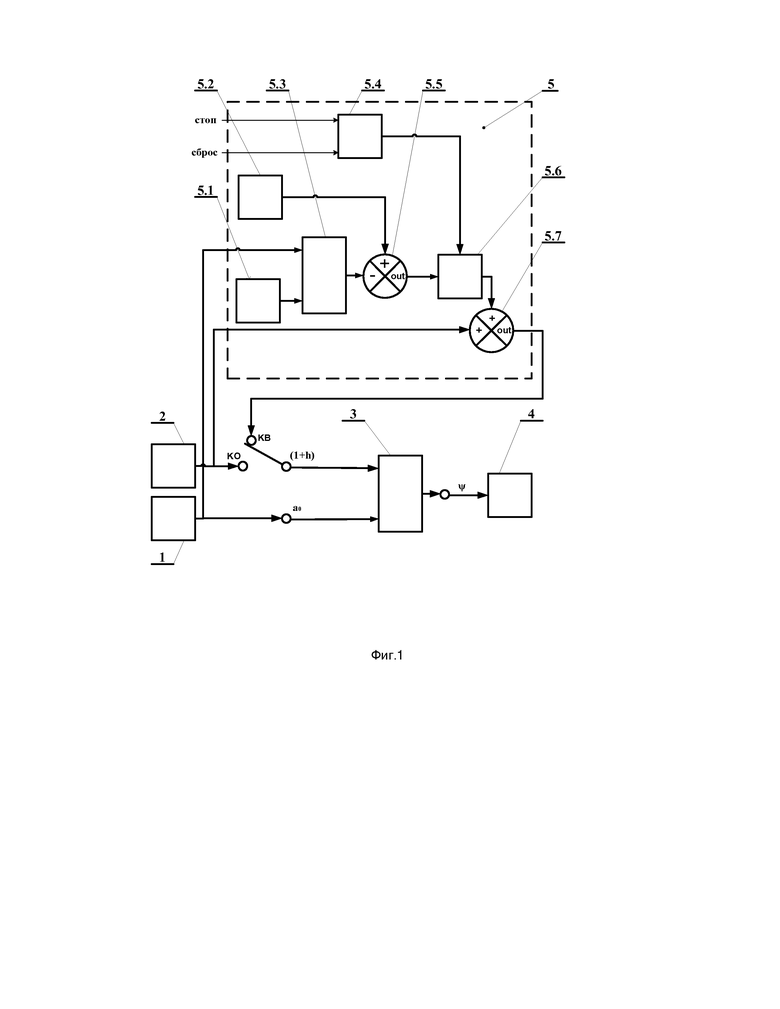
Фиг.2. изображает комбинаторные зависимости, используемые в регуляторах гидравлических турбин;
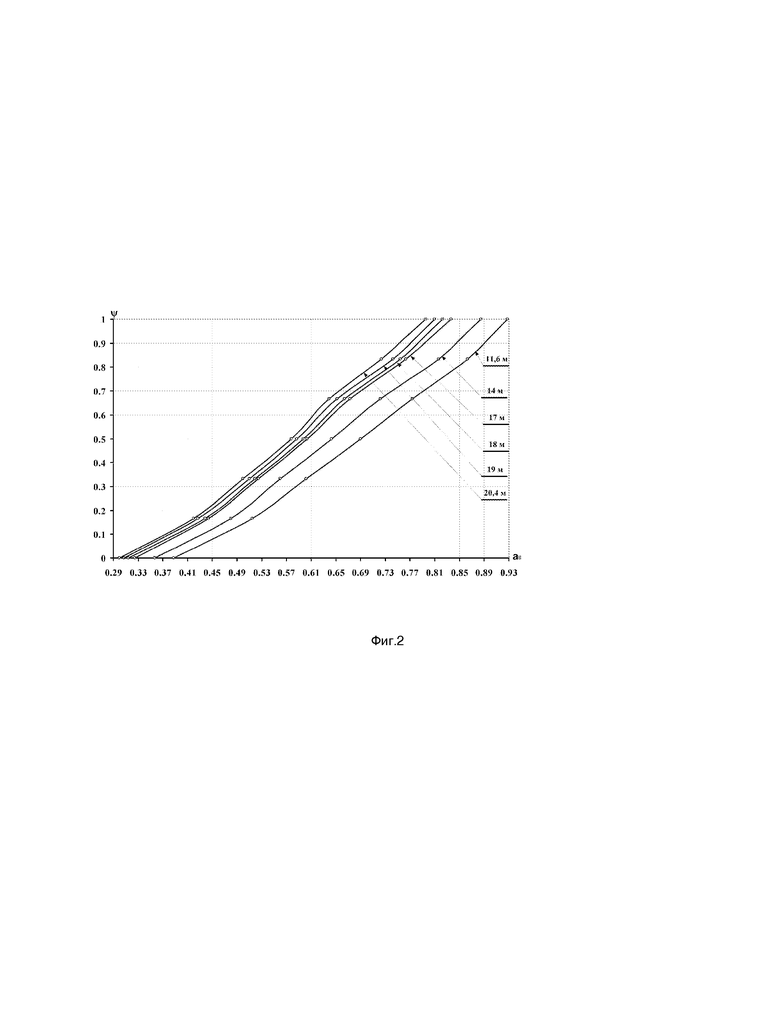
Фиг.3. изображает графики зависимости эталонной мощности 


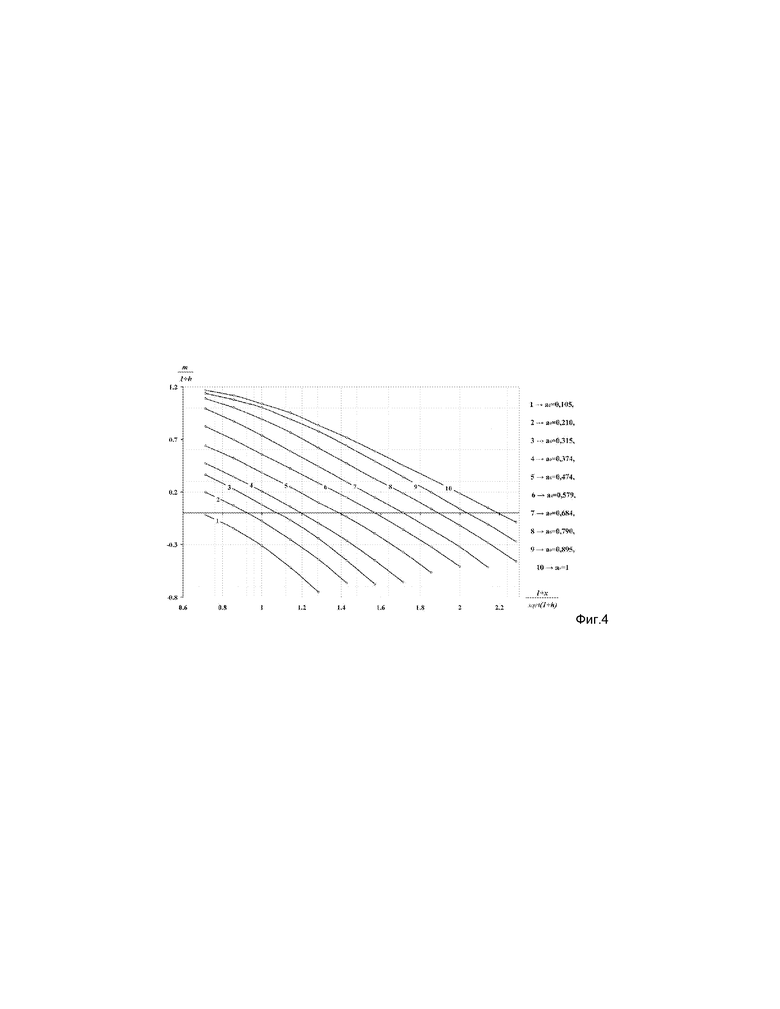
Фиг.4. изображает графики зависимости относительного приведенного момента 

Как показано на чертеже, комбинаторный механизм 3, формирующий величину угла установки лопастей рабочего колеса поворотно-лопастной турбины по величине открытия направляющего аппарата и напору, состоит из датчика (или задатчика) 1 величины открытия направляющего аппарата, датчика 2 напора и собственно формирователя 3 комбинаторной зависимости, выход его подключен к входу привода 4 изменения угла установки лопастей. Выход датчика 2 напора может быть подключен к входу 
В дальнейшем изложении и на представленных рисунках обозначены:
максимальная величина открытия направляющего аппарата 
максимальное изменение угла установки лопастей 
номинальный напор нетто 
Если 


Работа устройства, реализующего предлагаемый способ, описана ниже. Для пояснения механизма действия способа используются типичные характеристики, представляемые заводом изготовителем турбины.
На фиг.2 показаны комбинаторные зависимости, характерные для поворотно-лопастных гидравлических турбин. По оси абцисс откладывается величина открытия направляющего аппарата в относительных единицах 
На фиг.3 представлены графики эталонной мощности 




На фиг.4 представлены графики зависимости относительного приведенного момента 






Следует обратить внимание на тот факт, что при 



Пусть, для определенности, сигнал датчика 5.2 активной мощности генератора больше, чем величина эталонной мощности, сформированная преобразователем 5.3 по величине открытия направляющего аппарата и углу установки лопастей с учетом экспериментальной характеристики заводских исследований.
Это означает, что действующий на агрегат напор выше, чем показывает датчик 2 напора, и комбинатор 3 неправильно установил угол разворота лопастей. Известно, что с ростом напора при одном и том же открытии для получения оптимального значения КПД угол установки лопастей 


Строгое соблюдение комбинаторной зависимости уменьшает пульсации давления в вихревом шнуре на выходе из турбины и ведет к уменьшению амплитуды вибрации агрегата, что уменьшает износ его узлов и повышает надежность работы. Временный отказ системы измерения напора не влияет на точность работы комбинаторного механизма, так как предлагаемое устройство выполняет функции коррекции напора и может выполнить ее не только при ошибках датчика, но и при ручном задании величины напора. Т.е. устройство обладает свойством резервирования системы измерения напора, что повышает надежность системы управления в целом.
Благодаря тому, что способ и реализующее его устройство учитывают как заводские характеристики для выработки сигнала эталонной мощности, так и значение активной мощности, обеспечивается корректировка значения напора до полного совпадения измеренного значения мощности (активной мощности) и эталонной мощности, что гарантирует достижение сочетания режимных параметров, обеспечивающих максимальный КПД.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления лопастями рабочего колеса поворотно-лопастной гидротурбины | 2017 |
|
RU2674375C2 |
| СПОСОБ УПРАВЛЕНИЯ МОЩНОСТЬЮ РЕАКТИВНЫХ ГИДРАВЛИЧЕСКИХ ТУРБИН | 2017 |
|
RU2636603C1 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ АКТИВНОЙ МОЩНОСТЬЮ ГИДРОАГРЕГАТА С ПОВОРОТНО-ЛОПАСТНОЙ ТУРБИНОЙ | 2009 |
|
RU2468246C2 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ АКТИВНОЙ МОЩНОСТЬЮ И ЧАСТОТОЙ ГИДРОАГРЕГАТА С ПОВОРОТНО-ЛОПАСТНОЙ ТУРБИНОЙ | 2013 |
|
RU2531068C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТОЧКИ КОМБИНАТОРНОЙ ЗАВИСИМОСТИ ПОВОРОТНО-ЛОПАСТНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ | 2020 |
|
RU2743704C1 |
| СПОСОБ АДАПТИВНОЙ КОРРЕКЦИИ КОМБИНАТОРНОЙ ЗАВИСИМОСТИ ПОВОРОТНО-ЛОПАСТНОЙ ГИДРОТУРБИНЫ | 2005 |
|
RU2302551C2 |
| Способ определения комбинаторной зависимости поворотно-лопастной гидротурбины | 1982 |
|
SU1078119A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ АКТИВНОЙ МОЩНОСТЬЮ ГИДРОАГРЕГАТА С ПОВОРОТНО- ЛОПАСТНОЙ ТУРБИНОЙ | 1972 |
|
SU420801A1 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ РОТОРА ПОВОРОТНО-ЛОПАСТНОЙ ГИДРОТУРБИНЫ | 2009 |
|
RU2399787C1 |
| Устройство для регулирования поворотно-лопастной гидротурбины | 1980 |
|
SU868099A1 |
Изобретение относится к области гидроэнергетики и может быть использовано в системах управления гидроагрегатов для коррекции угла установки лопастей рабочего колеса путем корректировки сигнала измеренного напора. Способ коррекции угла установки лопастей рабочего колеса поворотно-лопастной турбины, сформированного на основе сигналов датчика 1 открытия направляющего аппарата и комбинаторного механизма датчика 2 напора, включает измерение сигналов датчиков угла установки лопастей и активной мощности генератора 5.1 и 5.2. По сигналам датчиков открытия направляющего аппарата и угла установки лопастей 1 и 5.1 на основе заводской характеристики формируют сигнал эталонной мощности, который сравнивают с сигналом активной мощности генератора. Если результат сравнения отличен от нуля, то корректируют сигнал датчика напора, поступающий на комбинаторный механизм для изменения угла установки 2 лопастей до тех пор, пока активная мощность генератора не станет равной эталонной мощности. Изобретение направлено на повышение точности установки угла лопастей рабочего колеса, увеличение КПД турбины и повышение надежности системы управления. 2 н.п. ф-лы, 4 ил.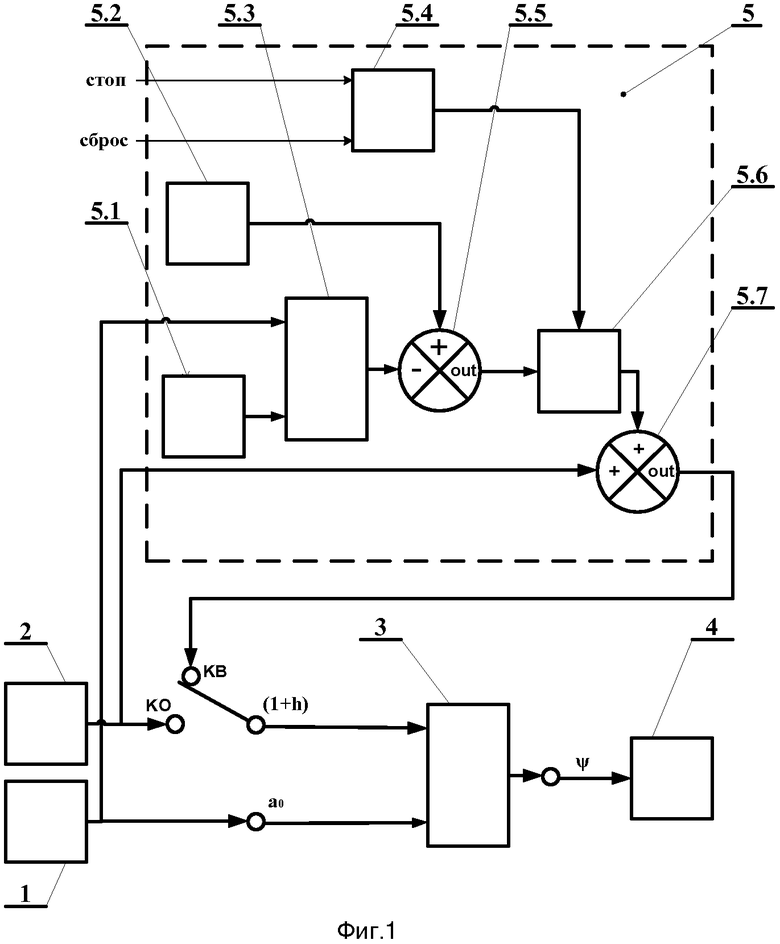
1. Способ повышения точности управления углом установки лопастей поворотно-лопастной турбины, формируемым на основе сигналов датчика открытия направляющего аппарата и комбинаторного механизма датчика напора, отличающийся тем, что дополнительно измеряют сигналы датчиков угла установки лопастей и активной мощности генератора, по сигналам датчиков открытия направляющего аппарата и угла установки лопастей на основе заводской характеристики формируют сигнал эталонной мощности, который сравнивают с сигналом активной мощности генератора и, если результат сравнения отличен от нуля, то корректируют сигнал датчика напора, поступающий на комбинаторный механизм для изменения угла установки лопастей до тех пор, пока активная мощность генератора не станет равной эталонной мощности.
2. Устройство повышения точности управления углом установки лопастей поворотно-лопастной турбины, формируемым на основе сигналов датчика открытия направляющего аппарата и комбинаторного механизма датчика напора с входами, соединенными с выходами датчика открытия направляющего аппарата и датчика напора, и подключенного выходом к входу привода изменения угла установки лопастей, отличающееся тем, что указанное устройство содержит датчик угла установки лопастей рабочего колеса, датчик активной мощности генератора, преобразователь, формирующий сигнал эталонной мощности, элемент сравнения, интегратор с системой управления интегрированием, сумматор и двухпозиционный перекидной переключатель (КО-КВ), при этом выходы датчика открытия направляющего аппарата и датчика угла установки лопастей связаны с входами преобразователя, формирующего сигнал эталонной мощности, а его выход и выход датчика активной мощности подключены на входы элемента сравнения, выход которого через интегратор связан с одним из входов сумматора, на второй вход которого подключен выход датчика напора, а выход сумматора связан с одним из контактов переключателя, другой контакт КО которого соединен с датчиком напора, а общий контакт подключен к входу комбинаторного механизма.
| Способ управления лопастями рабочего колеса гидротурбин | 1969 |
|
SU291583A1 |
| Способ регулирования поворотнолопастной гидротурбины | 1976 |
|
SU589456A1 |
| Способ регулирования поворотнолопастной гидротурбины | 1977 |
|
SU659780A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |

