Изобретение относится к способам адаптивной коррекции комбинаторной зависимости и может быть использовано в гидроэнергетике для оптимального регулирования поворотно-лопастной гидротурбины в условиях эксплуатации.
Известен способ определения комбинаторной зависимости поворотно-лопастной гидротурбины, заключающийся в корректировании положения лопастей рабочего колеса и открытия направляющего аппарата путем подачи пробных периодических воздействий на приводы управления лопастями рабочего колеса и направляющего аппарата при заданном напоре и мощности (см. описание к авторскому свидетельству РФ №1078119, МПК F03В 15/12 от 19.02.82 г.).
Известный способ заключается в выявлении режимов максимального коэффициента полезного действия (к.п.д.) путем формирования двух противофазных индикаторных сигналов, подаваемых на привод лопаток направляющего аппарата и привод лопастей рабочего колеса до достижения средними значениями индикаторных сигналов нулевого значения.
В качестве исходных данных для расчета к.п.д. используют результат измерений перепада давления в расходомерном створе гидроагрегата, т.е. к.п.д. определяют косвенным методом с фиксацией мощности, положений лопаток направляющего аппарата и лопастей рабочего колеса при неизменном напоре.
Недостатком способа является сложность и ограниченность применения только в условиях проведения специальных испытаний.
В качестве прототипа принят способ оптимизации комбинаторной зависимости поворотно-лопастной гидротурбины, заключающийся в корректировании положения лопастей рабочего колеса и открытия направляющего аппарата путем подачи воздействий на приводы управления лопастями рабочего колеса и направляющего аппарата при заданном напоре и мощности (см. описание к авторскому свидетельству РФ №446676, МПК F03В 15/12 от 06.12.72 г.).
В известном способе после достижения мощностью гидротурбины заданного значения по комбинаторной зависимости отводят ролик комбинатора от кулачка, ступенями изменяют открывание направляющего аппарата и расчетным путем определяют коэффициент полезного действия (к.п.д.) до тех пор, пока к.п.д. при двух соседних открытиях не станут достаточно близкими.
К.п.д. вычисляют косвенным методом по перепаду давления в водо-водном тракте гидротурбины, а при коррекции воздействуют только на изменение положения лопаток направляющего аппарата, что недостаточно, поскольку каждому новому их положению требуется поиск соответствующего оптимального угла разворота лопастей рабочего колеса.
Способ сложен и не может применяться на поворотно-лопастной гидротурбине в процессе ее эксплуатации. Кроме того, ненадежны измерения исходных данных для расчета к.п.д.
На практике для регулирования мощности гидротурбин многоагрегатных гидроэлектростанций используют одинаковые для всех агрегатов, заранее рассчитанные комбинаторные зависимости, реализуемые с помощью механических или электрических преобразователей.
Суть (смысл) коррекции заключается в определении открытия направляющего аппарата и угла разворота лопастей, соответствующих максимальному к.п.д. агрегата.
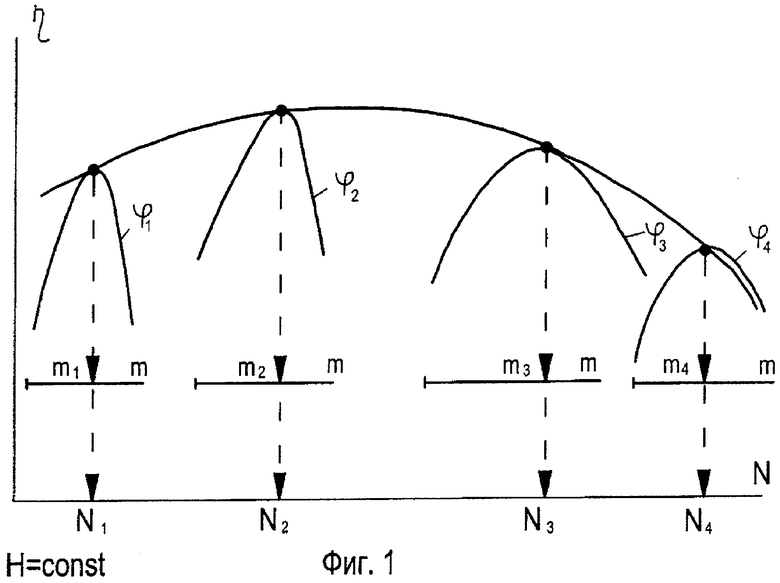
Комбинаторная зависимость изображается кривой m=f(ϕ), огибающей максимальные к.п.д. при постоянном напоре (Н=const), где m - открытие направляющего аппарата, а ϕ - угол разворота лопастей.
Заданной мощности (Nзад) соответствуют открытие направляющего аппарата (m1) и угол разворота (ϕ1). По кривой определяют точку максимального к.п.д. (η1), соответствующего заданной мощности Nзад и напору Н.
Однако каждый агрегат имеет отличительные особенности, влияющие как на саму величину к.п.д., так и на выбор оптимальных параметров регулирования (открытие направляющего аппарата и угол разворота лопастей рабочего колеса).
К отличительным особенностям относятся:
- существенные отклонения от проектных размеров водоводного тракта, даже если они находятся в относительных единицах в пределах допуска строительных норм;
- различия в зазорах между лопастями рабочего колеса и камерой;
- наличие расхождения между расчетными и фактическими значениями открытия направляющего аппарата и угла разворота лопастей рабочего колеса;
- разброс в открытии лопаток направляющего аппарата;
- различия по профилю и размерам лопастей рабочего колеса и т.д.
Фактическое наличие «мертвых» ходов в прямой и обратной связях также влияет на точность выбора параметров регулирования.
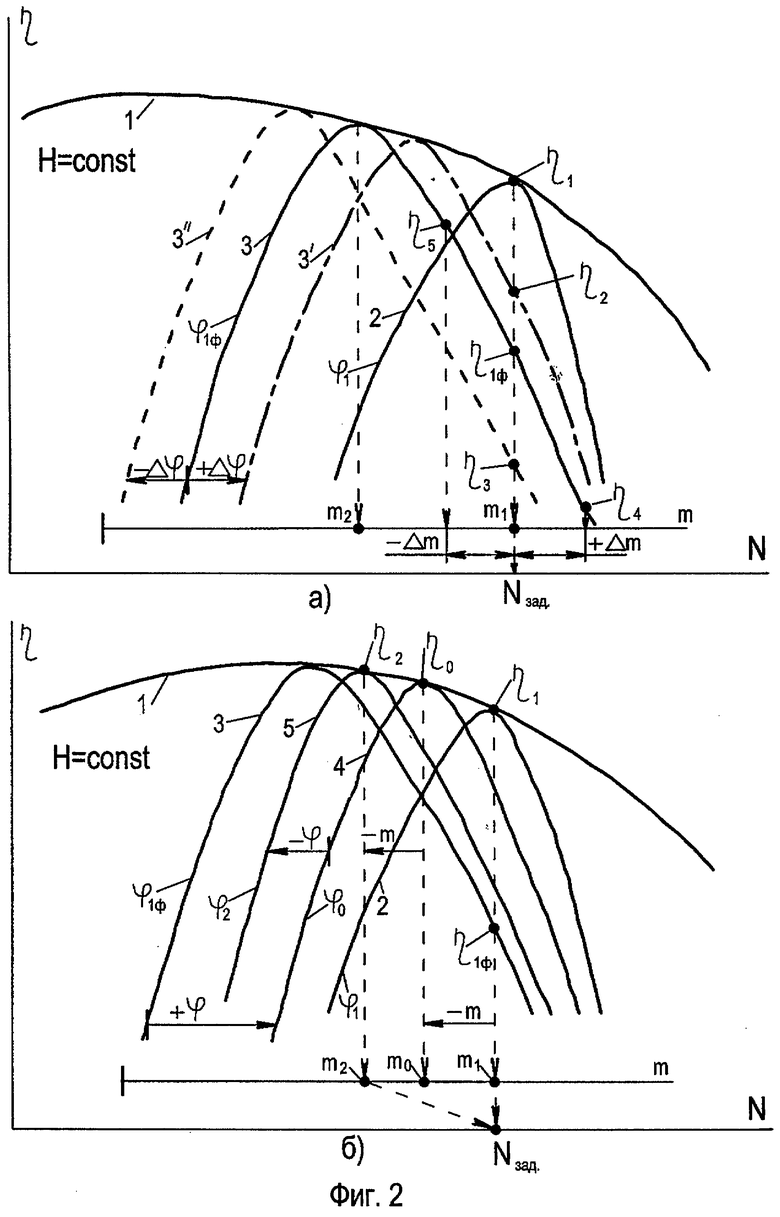
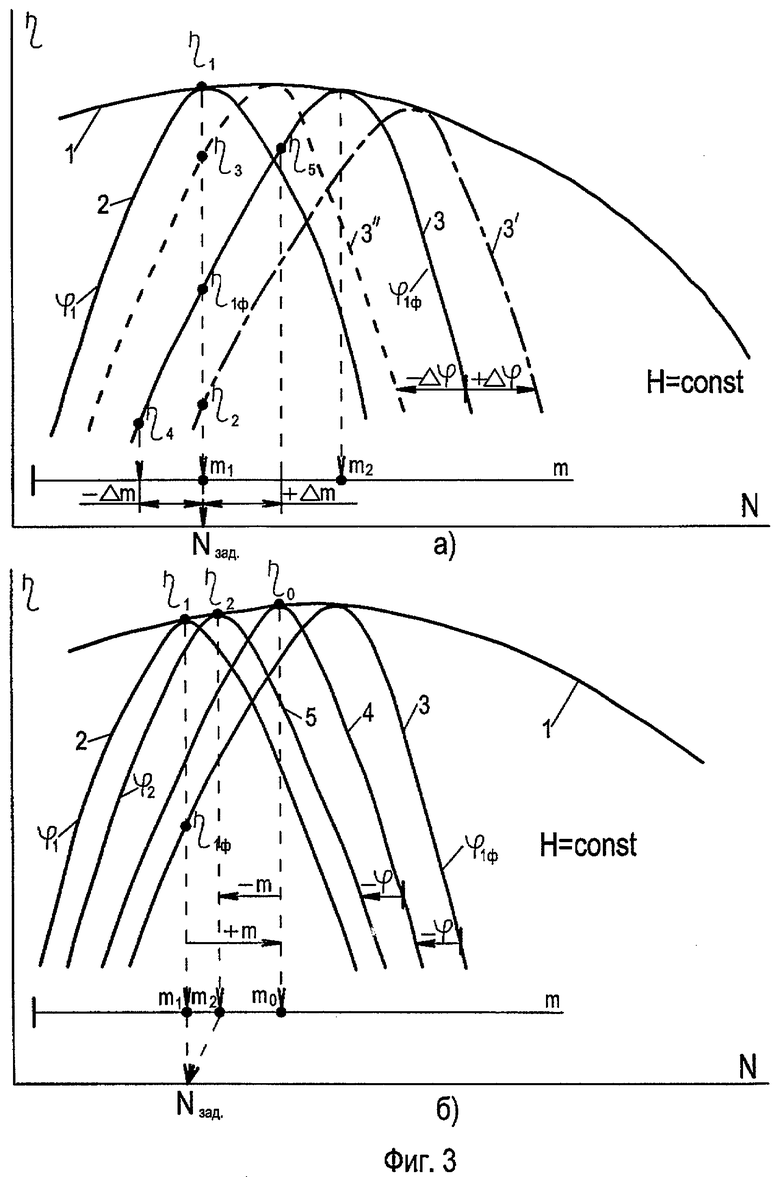
В силу отличительных особенностей каждого агрегата кривая для определения максимального к.п.д. фактически не совпадает с кривой, соответствующей комбинаторной зависимости. Она может быть смещена «влево» от нее, «вправо» и только в редком случае совпадать с кривой комбинаторной зависимости. В последнем случае параметры регулирования (m1, ϕ1), полученные по комбинаторной зависимости, соответствуют оптимальным.
Смещение же кривых означает, что углу разворота лопастей (ϕ1) оптимально соответствует другое открытие направляющего аппарата не (m1), a (m2), и, как следствие, другая мощность. Агрегат при этом фактически работает с пониженным к.п.д. не (η1), а (η1ф) и несет заданную мощность с повышенным расходом воды.
С учетом вышесказанного следует, что параметры регулирования, полученные по рассчитанной комбинаторной зависимости, одинаковой для всех агрегатов, оптимальными для каждого агрегата не являются.
Проведенные эксперименты подтверждают, что при переходе на ручное регулирование на поворотно-лопастной гидротурбине за счет индивидуальной оптимизации параметров можно получить 5-10% дополнительной мощности.
Технической задачей предлагаемого изобретения является обеспечение коррекции с возможностью оптимизации параметров регулирования мощности (получения максимально возможного к.п.д.) при минимальном расходе воды и с учетом индивидуальных отличительных особенностей поворотно-лопастной гидротурбины.
Техническая задача решается тем, что в предлагаемом способе вначале выявляют наличие несоответствия оптимальным параметрам регулирования турбины, полученным по комбинаторной зависимости, затем выводят комбинаторную зависимость из работы, определяют направление коррекции и производят поиск оптимальных параметров, при котором прирост расхода воды с изменением положения лопастей рабочего колеса был бы равен приросту расхода воды при изменении открытия направляющего аппарата, для чего формируют пробные импульсные воздействия, производя их одновременно, но в противоположных направлениях, группируя их по парам и ступенчато подают их на приводы управления лопастями рабочего колеса и направляющего аппарата, измеряя приращение электрической мощности агрегатарчередной ступени и фиксируя знаки изменения электрической мощности агрегата, при этом в качестве признака для выбора корректирующей пары импульсов используют положительный прирост электрической мощности, причем коррекцию продолжают до момента, когда приращение мощности агрегата станет равным нулю, при этом результирующие параметры накапливают в блоке памяти для последующего их использования в качестве оптимальных при возникновении режима агрегата, соответствующего по напору и мощности.
Предлагаемый способ позволяет оптимизировать коррекцию параметров регулирования с учетом индивидуальных отличительных особенностей поворотно-лопастной гидротурбины.
Благодаря более точному определению оптимальных параметров регулирования поворотно-лопастной гидротурбины экономится расход воды при неизменной мощности, что позволяет произвести дополнительную электроэнергию. Кроме того, при повышении к.п.д. поворотно-лопастной гидротурбины уменьшается доля разрушительного воздействия энергии воды, что снижает затраты на ремонтно-восстановительные работы.
Способ адаптивной коррекции комбинаторной зависимости поворотно-лопастной гидротурбины иллюстрируется чертежами, где
на фиг.1 представлена кривая, изображающая комбинаторную зависимость;
на фиг.2 - то же, смещение кривой влево;
на фиг.3 - то же, смещение кривой вправо;
на фиг.4 - представлена блок-схема для реализации предлагаемого способа.
Суть предлагаемого изобретения в определении направления коррекции и выстраивании соответствующей ему логики поиска оптимальных параметров, для чего необходимо иметь информацию, которая позволит установить смещение фактической кривой 3 относительно кривой 2 комбинаторной зависимости.
После завершения установки режима заданной мощности (Nзад) по комбинаторной зависимости, подают команду на вывод ее из работы, формируют единичные пробные импульсные воздействия на привод управления лопастями рабочего колеса в сторону их свертывания (-Δϕ) и в сторону разворота (+Δϕ), на привод управления направляющим аппаратом в сторону открытия (+Δm) и закрытия (-Δm). При воздействии замеряют изменение электрической мощности агрегата
ΔN=Nф-Nзад,
где Nф - фактическая мощность агрегата.
Мощность гидротурбины рассчитывают по формуле
N=HQη,
где Q - расход воды через поворотно-лопастную гидротурбину. Мощность турбины инвариантна относительно расхода воды при изменении положения лопастей рабочего колеса и направляющего аппарата и зависит только от к.п.д. при условии, если импульсные пробные воздействия выбраны таким образом, чтобы прирост расхода воды был одинаковым
[ΔQϕ]=[ΔQm]
т.е. воздействия необходимо производить одновременно, но в противоположных направлениях: на открытие направляющего аппарата (+Δm) и на свертывание лопастей (-Δϕ) и/или на закрытие направляющего аппарата (-Δm) и на разворот лопастей (+Δϕ). При таких воздействиях изменение расхода воды отсутствует (приросты расхода воды имеют равное значение и противоположны по знаку).
При этом реакция поворотно-лопастной гидротурбины на воздействие пробных импульсов определяется положением кривой: «слева», «справа» или совпадает. Это условие может быть выбрано с достаточной точностью путем физического или математического моделирования турбины.
Условие определяет не только положение кривой, но и направление коррекции параметров регулирования в сторону оптимума.
Если кривая расположена «слева», то для поиска оптимума необходимо подавать ступенчато импульсные воздействия (+Δϕ) (в сторону разворота лопастей) и (-Δm) (в сторону закрытия направляющего аппарата), если кривая расположена «справа» - то, наоборот, (-Δϕ) (в сторону разворота лопастей) и (+Δm) (в сторону открытия направляющего аппарата).
В рассматриваемом случае электрическая мощность является функцией двух аргументов
N=f(ϕ, m)
Условием достижения оптимума (максимума к.п.д.) является равенство нулю полного приращения электрической мощности:

т.е. регулирование необходимо производить до момента выполнения вышеуказанного условия (1), при этом шаг ступенчатого воздействия следует минимизировать для повышения точности корректировки, а импульсы подавать до момента, при котором разница между фактической и заданной мощностями гидротурбины станет равной нулю
N=Nф-Nзад=0
На фиг.1 представлена блок-схема для реализации предлагаемого способа.
Блоки 1-8 упрощенно изображают схему регулирования поворотно-лопастной турбины с использованием комбинатора, где блок 1 формирует команду на установку заданной мощности, блок 2 управляет приводом направляющего аппарата 3 и комбинатора 5, с выхода которого подается сигнал на блок 6, формирующий соответствующий сигнал на привод управления лопастями 7; 4 и 8 - индикаторы соответственно положения направляющего аппарата и угла разворота лопастей. Запуск схемы коррекции комбинаторной зависимости производят с помощью блока 9.
Блок 9 отключает комбинатор 5 и запускает блок 10, формирующий пробные импульсные воздействия. Блок 14 вычисляет величину и знак изменения мощности при очередном воздействии пробных импульсов на агрегат через блоки 2 и 6. Данные для расчета на блок 14 поступают от блока 1 (заданная мощность) и датчика мощности 13 гидрогенератора (фактическая мощность). Сигналы о пробных импульсах и соответствующие изменения мощности от блоков 10 и 14 поступают на блок логики 11, который определяет логику регулирования по трем возможным вариантам: кривая «слева», кривая «справа», кривая совпадает с кривой комбинаторной зависимости.
В зависимости от результатов пробных импульсных воздействий с выхода блока 11 подают сигналы на блок 12, формирующий корректирующие воздействия или команду на запрет коррекции, если параметры регулирования по комбинаторной зависимости оказались оптимальными. Если требуется дополнительная коррекция, то сформированные соответствующие импульсные воздействия встречного направления подают на блоки 2, 6 управления приводами направляющего аппарата и разворота лопастей.
Блок 15 производит вычисление по условию (1), при выполнении которого в нем формируют сигнал на остановку (запрет) регулирования. Сигнал запрета подают на блок 12.
В результате корректирующего регулирования мощность агрегата возрастает, в блоке 14 формируют сигнал, подаваемый на блок 16, который дает импульсные команды на закрытие направляющего аппарата и свертывание лопастей.
Окончание процесса регулирования осуществляют путем подачи команд запрета на блок 16 от блоков 14, 15. Оба воздействия блока 16 снижают расход воды.
Регулирование заканчивают при условии равенства заданной и фактической мощности, полученной при снижении расхода воды.
Скорректированные параметры регулирования подают в блок памяти 17 и при возникновении в процессе эксплуатации режима (по напору и мощности), который уже был оптимизирован, выполнение коррекции не требуется.
До начала коррекции от блока 9 вначале производят запрос в блок памяти 17 и при наличии в нем соответствующих режиму оптимизированных параметров они подаются в блоки 2 и 6.
Изобретение относится к способам адаптивной коррекции комбинаторной зависимости и может быть использовано для оптимального регулирования поворотно-лопастной гидротурбины. Вначале выявляют наличие несоответствия оптимальным параметрам регулирования турбины, полученным по комбинаторной зависимости. Затем отключают комбинатор, определяют направление коррекции и производят поиск оптимальных параметров, при котором прирост расхода воды с изменением положения лопастей рабочего колеса был бы равен приросту расхода воды при изменении открытия направляющего аппарата, для чего формируют пробные импульсные воздействия, производя их одновременно, но в противоположных направлениях, группируя их по парам, и ступенчато подают их на приводы управления лопастями рабочего колеса и направляющего аппарата, измеряя приращение электрической мощности агрегата очередной ступени и фиксируя знаки изменения электрической мощности агрегата. При этом в качестве признака для выбора корректирующей пары импульсов используют положительный прирост электрической мощности, причем коррекцию продолжают до момента, когда приращение мощности агрегата станет равным нулю, при этом результирующие параметры накапливают в блоке памяти для последующего их использования в качестве оптимальных при возникновении режима агрегата, соответствующего по напору и мощности. Способ позволяет обеспечить получение максимального к.п.д. агрегата. 4 ил.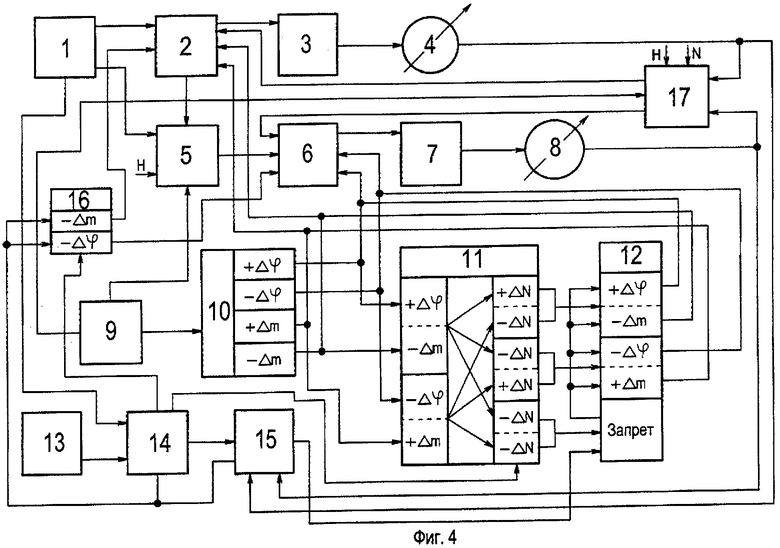
Способ адаптивной коррекции комбинаторной зависимости поворотно-лопастной гидротурбины, заключающийся в изменении положения лопастей рабочего колеса и открытия направляющего аппарата путем подачи пробных воздействий на приводы управления лопастями рабочего колеса и направляющего аппарата при заданном напоре и мощности, отличающийся тем, что вначале выявляют наличие несоответствия оптимальным параметрам регулирования турбины, полученным по комбинаторной зависимости, затем отключают комбинатор, определяют направление коррекции и производят поиск оптимальных параметров, при котором прирост расхода воды с изменением положения лопастей рабочего колеса был бы равен приросту расхода воды при изменении открытия направляющего аппарата, для чего формируют пробные импульсные воздействия, производя их одновременно, но в противоположных направлениях, группируя их по парам, и ступенчато подают их на приводы управления лопастями рабочего колеса и направляющего аппарата, измеряя приращение электрической мощности агрегата очередной ступени и фиксируя знаки изменения электрической мощности агрегата, при этом в качестве признака для выбора корректирующей пары импульсов используют положительный прирост электрической мощности, причем коррекцию продолжают до момента, когда приращение мощности агрегата станет равным нулю, при этом параметры регулирования накапливают в блоке памяти для последующего их использования в качестве оптимальных при возникновении режима агрегата, соответствующего по напору и мощности.
| Способ оптимизации комбинаторной зависимости поворотно-лопастной гидротурбины | 1972 |
|
SU446676A1 |
| Способ определения комбинаторной зависимости поворотно-лопастной гидротурбины | 1982 |
|
SU1078119A1 |
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ СТОЛА С БОКОВОЙ СТЕНКОЙ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2542817C2 |
| ОПТИЧЕСКИЙ ПАРАМЕТРИЧЕСКИЙ ГЕНЕРАТОР | 1999 |
|
RU2165635C2 |
| Футляр для пломбировочных тисков | 1941 |
|
SU67453A1 |

