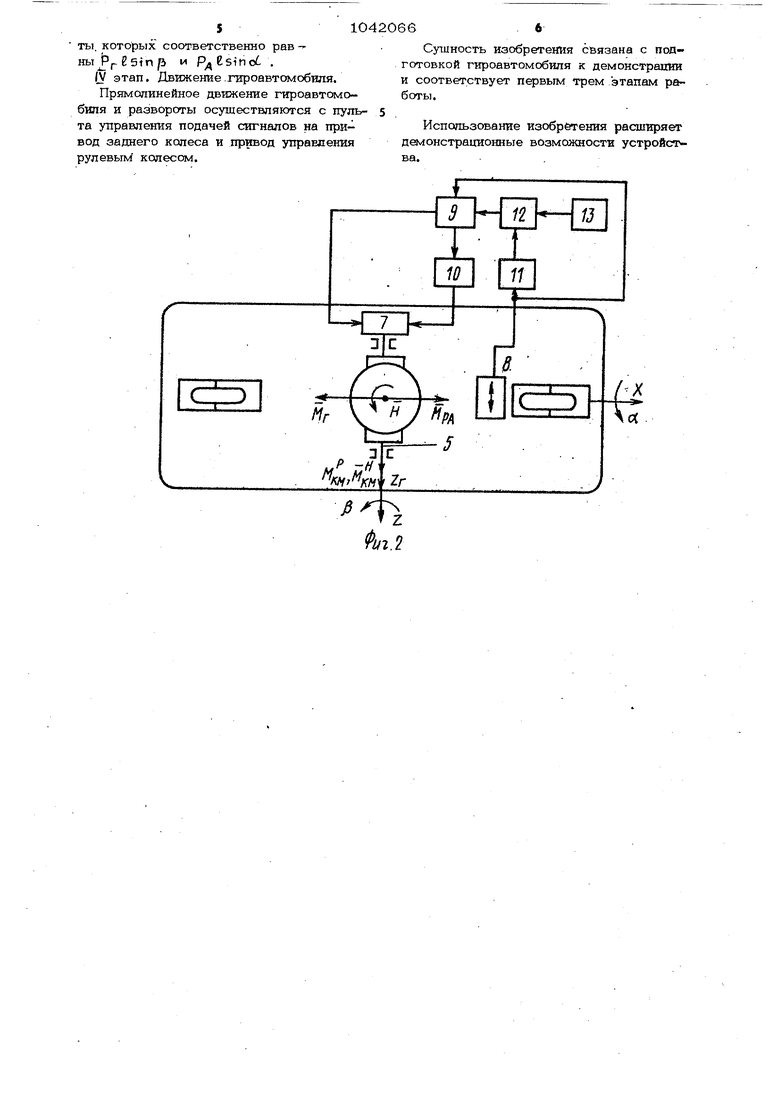
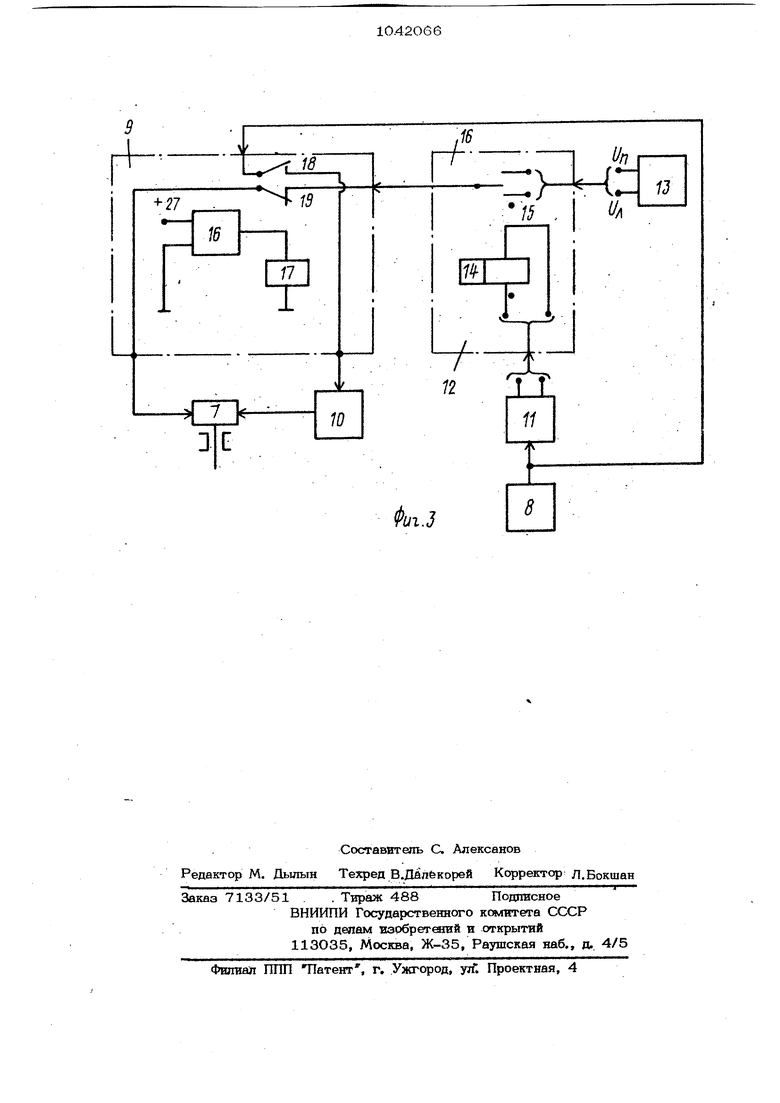
.Мзобретение относится к наглядным пособиям и может быть использовано для . демострании гироавтомобиля. Известно устройство для демонстраци гироавтомобиля, содержащее платформу с укрепленными-на ней передними и ведущими заднимиколесами ирасположенные на ней маятниковый чувствительный элемент и узел двухстепенного вертикального гироскопа, кинематически соеди ненный с коррекционным мотором, электрически подключенный к усилителю Cll. Недостаток известного устройства низкие демонстрационные -возможности. Цепью изобретения является расширение демонстрационных возможностей. Поставленная цель достигается тем, что устройство для демонстрации гироавтомобиля, содержащее платформу с укреп ленными на ней передними и ведущими задними колесами и расположенные на и ей м аятниковы и чу вствит ельны и элем ент и узел двухстепенного вертикального ги- роскопа, кинематически соединенный с электрически по коррекционным мотором ключенный к усилителю, имеет реле времени, коммутатор, задатчик начального положения гироскопа и фазочувствительный выпрямитель , вход которого электри чески соединен с выходом маятникового чувствительного элемента и первым входом реле времени, второй вход которого связан с выходом коммутатора, подключенного первым входом к выходу задатчика начального положения гироскопа, а вторым входом - к выходу фазочувстви тельного выпрямителя, причем первый выход реле времени соединен с входом усилителя, а второй выход - с управляющим входом коррекционного мотора. На фиг. 1 показана упрощенная кине матическая схема модели гироавтомобиля на фиг. 2 - структурная схема систегйы ко| рекции, на фиг. 3 - развёрнутая част структурной схемы, поясняющая ее работу. Модель гироавтомобиля (фиг. 1) содержит платформу 1, на которой установ лены заднее колесо 2 {ведущее) и перед нее колесо 3( рулевое). На платформе модели гироавтомобиля установлен двухстепенный вертикальный гироскоп 4, ось 5 которого параллельна поперечной оси автомобиля. Верхняя маятяиковость гироскопа создается грузом 6, центр масс которого относительно оси подвеса смещен на величину. КоррекционныЙ мо тор 7, закрепленнь й на оси 5, соединен с маятниковым чувствительным элементом (МЧЭ) 8, установленным на платфор- ме, через реле времени 9 и усилш ель 10. Кроме того, МЧЭ через фазочувствительный выпрямитель (ФЧВ) 11 упра.вляет состоянием коммутатора 12, через цото- рый на коррекционный мотор 7 на время разгона гиромотора поступает -сигнал начальной установки с задатчика 13 начального положения гироскопа. МЧЭ долЖен иметь зону линейности 15-20°. В связи i с этим в качестве МЧЭ 8 применен индуктивный датчик-маятник, обмотка возбуждения которого запитывается двумя фазами переменного напряжения. Коррекционный мотор имеет две обмот к и управления. Обмотка с входом один. , функционирует после срабатывания реле времени, а с входом два - до срабатыва.НИИ реле времени. На фиг. 3 представлен один из вариантов выполнения коммутатора 12 и реле времени 9. Управляемый коммутатор представляет собой поляризованное трехпози- ционное реле 14, обмотка которого подключена к выходу ФЧВ. Через контак- .... ты 15 и 16 этого реле на-второй вход реле времени поступает сигнал начального положения с задатчика 13. Реле времени 9 состоит из элемента блока задержки 16 (настроенного на время разггона гидромотора) и исполнительного реле 17, контакты 18 которого включены между первБ1м входом и выходом реле времени, а контакты 19 - между вто-. рым входом и выходом. , Кроме того, приняты следующие буквенные обозначения; Н - кинетический момент гироскопа, ОХ - продольная ось Ёгвтомобиля, OZ - поперечная ось автомобшш, ось вращения гироскопа, вертикаль; вес автомобиля; координата центра тяжести О автомобиля, Рр- вес груза 6; i - координата центра тяжести О., груза;угол отклонения автомобиля относительно линии колес; УГ.ОП отклонения гироскопа относительно плоскоети кузова; момент начальной выставки гироскопа;КИ рээвиваемый коррекционн ным мотором в рабочем состоянии;:: |-° ° °1П1ческий моменте; Мр - маятт1ковый момент гироавтомобипя относительно mimw колесной пары; и |U - сигналы сигнальной выставки, натфимер, переменного тока различной фазы, но одинаковые по амплитуде, которые переводят гироскоп на левый ( /3 ) или правый ( fb -/5 упоры. Гироавтомобиль имеет дистанционное управление, которое состоит из пульта управления и гибкого жгута. Пульт упрйвления содержит тумблер Питание, по которому подается переменное трехфа ное напряжение 36 В, f 400 Гц и постоянное напряжение + 27 В.-Кроме того, пульт управления содержит тумблер приво .да заднего колеса Вперед - назад и тумблер управления .рулевого колеса Влево - вправо. Если же гироавтомо- биль сделать достаточно больших разме ров, то блок питания можно установить на В кузове, а управлять Движением автомобиля можно по радиокомандам . Всё эти элементы не показаны, так. как в такой детализации нет необходимости, а их реализация может быть самой разнообразной и не вызывает принципиальных за- тру нений. . Узел двухстепенного вертикального гироскопа содержит вертикальный гиро- . скоп 4 с осью подвеса 5. После включения устройство работает следующим образом. I этап. Разгон гиромотора и приведение гироскопа в исходное состояние. . Этот этап начинается с момента подачи питания на Гироавтомобиль. При этом приводы заднего колеса и рулевого коле,са не должны рабог.ать.Основное назначение этого этапа -привести гироскоп в положение, соответствующее наклону кузова гироавтомо биля.Если ot -tii,,To , и наоборот.ес ли . то ict , (Ьр, - углы отклонения кузова и гироскопа до упора). Если такого соответствия между углами ofrn и РГЛ автоматика схёвгы в начала разгона гиромотора приводит гироскоп в положение , соответст вуютдее знаку ,. Допустим, что oi -botj, а , тогда МЧЭ, 8 выдает сигнал переменного тока, фаза которого определена знаком угла о Этот сигнал подается на вход ФЧВ, на выходе которого формируется напряженне, попярноси. которого определяется фазой МЧЭ. Это напряжение поступает на nejH вый вход коммутатора 12 (на обмотку поляризованного реле 14). Реле 14 сра10664 батывает и замыкается контакт 15 (если бы с 5 fTi ТО замкнулся бы контакт 16). Теперь по цепи, составле1шой этим контактом , на второй вход реле време1Ш подается напряжение начальной выставки и., , которое через контакт 19 исполнительного реле 17 поступает на второй вход коррекционного мотора 7. Под действием этого напряжется коррекционный мотор 7 развивает мо мент Л 1 пР РSinfbf , где n 2-3 коэффициент запаса, и гироскоп с правого упора переходит на левый Упор(. Одновременно начинает наби-: рать обороты гиромотор и запускается реле времени (элемент задержки 16) при подаче на него +27 В. П этап. Снятие Гироавтомобиля с упора. После набора гиромотором рабочих оборотов срабатывает реле времени : 9 (оно настраивается на время разгона ги-ромотора), т.е. подается на плюс на выход элемента задержки 16 (фиг. 2). При этом срабатывает реле 17 и производит следующие переключения: контактом ,19 отключает коммутатор, а следовательно задатчик 13 от второго входа коррекционного мотора 7 ( М 0), контактом 18 подключаеч АЧЭ 8 на вход усилителя Ю (первый вход - выход реле времени), через который усиленный сигнал поступает на первый коррекционного мотора 7. Коррекционный мотор начинает созда-. вать момент М ) - Kct , где К коэффициент крутизны контура коррекции (в конструкции принято Эт)« Под действием этого момента гироузел начинает ускоренно вращаться с угловой скоростью ( - р), развивая при этом гироскопический момент М Н-созр-р . Как только М,- превысит маятниковый момент Гироавтомобиля Mp. f Lsincst , Гироавтомобиль снимает с упора и превращается в трехстепенный гироскоп. Ш этап. Приведение Гироавтомобиля в рабочее состояние. В дальнейшем на коррекционный мотор оступает сигнал только с МЧЭ 8 по цеи, составленной контактом 18, а Гировтомобиль ведет себя как трехстепенный ироскоп. Окончательное приведение гиро втомобиля в вертикальное положение оризонтальное положение рамы кузова существляется коррекционным мотором момент КоС) и грузами Рр и P; , моменты. которых соответственно рав Hbi pgSin/i и p Ksino , (У этап. Движение .гироавтомобиля. Прямолинейное движение гироавтомобипя и развороты осуществляются с пульта управления подачей сигналов на привод заднего колеса и привод управления рулевым колесом. 10 66 Сушность изобретения связана с подготовкой гироавтомобиля к демонстрации и соответствует первым трем этапам работы. Использование изобретения расширяет демонстрационные возможности устройства.
+ 27
,16
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для демонстрации гироавтомобиля | 1987 |
|
SU1462398A1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| Тренажер для изучения гирополукомпаса | 2021 |
|
RU2761381C1 |
| Тренажер для изучения авиагоризонта | 2017 |
|
RU2658554C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |
| УСТРОЙСТВО КОРРЕКЦИИ ГИРОВЕРТИКАЛИ | 1998 |
|
RU2145057C1 |
| Имитатор успокоителя качки корабля | 1983 |
|
SU1080190A1 |
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК КРЕНА | 2007 |
|
RU2337314C1 |
УСТРОЙСТВО ДЛЯ ДЕМОНгСТРАШИ гаРОАВТОМОБИЛЯ, содержа щее платформу с укрепленными на ней передними и ведущими задними колесами и расположенньге на ней маятниковый чувствительный элемент и узел двухсте пенного вертикального гироскопа, кинем тически . соединенный с крррекционным .мотором, электрически подключенный к усилителю, .ющееся тем, что, С целью расширения демонстрацион- ных возможностей, оно имеет реле времени, коммутатор, задатчик начального пол ожешш гироскопа и фазочувствительный выпрямитель, вход которого электрически соединен с выходом маятникового чувствительного элемента и первым входом реле времени, второй вход которого связан с выходом коммутатора, подключенного первым входом к выходу задатчика начального положения гироскопа, а вто рым входом - к выходу фазочувствительного выпрямителя, причем первый выход реле времени соединен с входом усилителя, а второй выход - с управляющим входом коррекционного мотора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Павлов В.А | |||
| Гироскопический эффект, его проявление и использование Л., Судостроение, 1967, с | |||
| Водяные лыжи | 1919 |
|
SU181A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
