Изобретение относится к навигации, а именно к системам определения положения объекта без использования отражения или вторичного излучения, и может быть использовано для коррекции инерциальных навигационных систем летательных аппаратов, систем прицеливания и предупреждения столкновений.
Оптические устройства дистанционного измерения координат подвижных относительно летательного аппарата (ЛА) объектов содержат размещаемые на ЛА оптико-локационные блоки (ОЛБ). Оптико-локационные блоки определяют направления на отдельные подвижные объекты, используя которые определяют координаты подвижных объектов. В ОЛБ широко используются двумерные анализаторы плоских изображений, например, на основе матричных фотодетекторов в сочетании с дальномерным устройством [1].
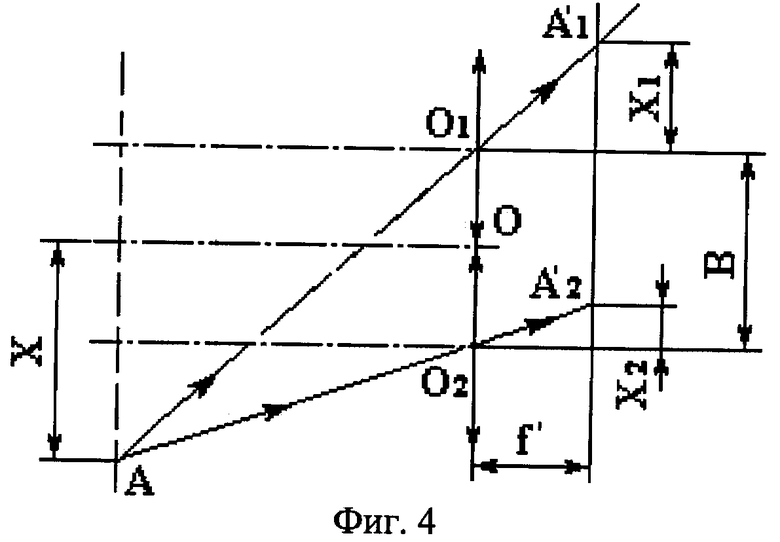
Известен способ определения положения контролируемого объекта или отдельных его точек в трехмерном пространстве, основанный на стереоскопической схеме геометрического типа, состоящей из двух одинаковых объективов 01 и 02 с параллельными оптическими осями, разнесенных на известное расстояние. Главные точки объективов (см. ГОСТ 7427-76) расположены на одной линии (линии базы), перпендикулярной к оптическим осям (фиг.4). Если выбрать начало координат О в середине линии базы длиной В, то, измеряя координаты изображений x1 и x2 произвольной точки Л и их разность p=x1-x2, называемую линейным параллаксом, можно определить координату  точки А. Две другие координаты на фиг.4 не показаны, определяются в соответствии с выражениями
точки А. Две другие координаты на фиг.4 не показаны, определяются в соответствии с выражениями
 ;
;  ,
,
где у=у1-у2 - координата изображений точки по оси у, перпендикулярной к плоскости чертежа; Z - ось системы координат, направленная от середины базы О к плоскости предметов.
Недостатком описанного аналога является фиксированное расположение ОЛБ на летательном аппарате, что сужает область пространства, в которой возможно измерение координат подвижных объектов.
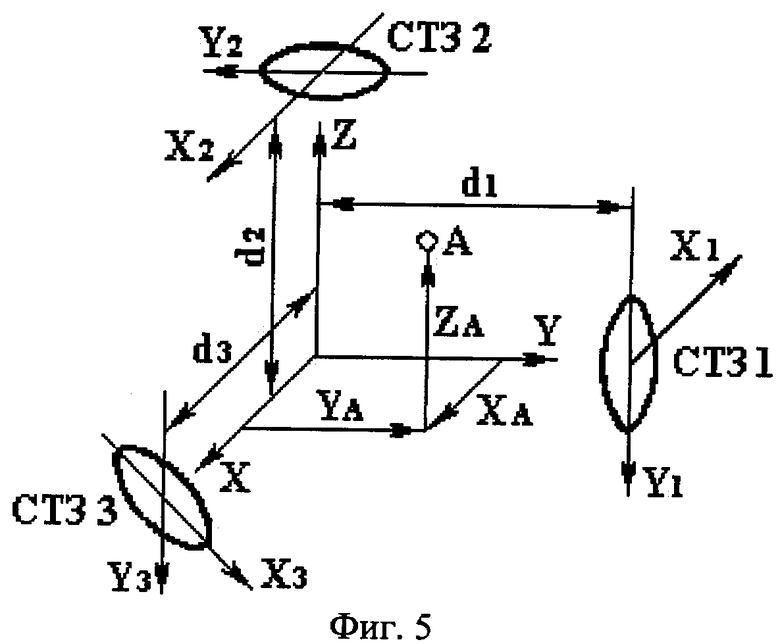
Известны наиболее близкие к заявляемому изобретению способ и устройство, описанные в [1] и относящиеся к системам дистанционного определения координат подвижных объектов. Способ основан на трехмерной локации точки с помощью трех или двух измерительных систем, оптические оси которых направлены вдоль осей ортогональной системы координат (X, Y, Z) и пересекаются в ее начале (фиг.5).
Используя, например, два ОЛБ с системами отсчета координат внутри каждого, можно определить координаты точки А путем решения следующей системы уравнений [1]:



 ,
,
где αxj - угловая координата точки А, отсчитанная от оси х в j-м ОЛБ; αyj - угловая координата точки А, отсчитанная от оси у в j-м ОЛБ; dj - расстояние до начала координат от передней узловой точки объектива j-го ОЛБ.
Недостатком является применение трех или двух ОЛБ, размещенных неподвижно на ЛА, при этом область пространства, в которой возможно измерение координат подвижных объектов, ограничена.
Технической задачей изобретения является расширение области пространства, в которой возможно измерение координат подвижных объектов.
Сущность изобретения состоит в том, что в способе измерения координат объекта, основанном на трехмерной локации точки объекта, расположенного в области пространства, доступной для измерения координат этого объекта, с помощью оптико-локационных блоков, расположенных на летательном аппарате, регистрируют изображения объекта посредством двух оптико-локационных блоков, установленных на внутренних рамах своих кардановых подвесов, каждый из которых имеет внешнюю и внутреннюю рамы, на осях которых установлены датчики углов их поворотов, осуществляют программную обработку оцифрованных изображений объекта, снимаемых с фотоматрицы первого оптико-локационного блока для определения координат Y1, Z1 и фотоматрицы второго оптико-локационного блока для определения координат Y2, Z2 изображений идентичной точки на объекте, снимают сигналы ψ1, υ1 c датчиков углов поворота внешней и внутренней рам первого карданова подвеса, по которым вычисляют матрицу A1,
где ψ1, υ1 - произвольные углы поворота фотоматрицы первого оптико-локационного блока в последовательности - O1Y1, O1Z1 соответственно, описывающую положение оптической оси первого оптико-локационного блока, связанного с внутренней рамой первого карданова подвеса, снимают сигналы ψ2, υ2 c датчиков углов поворота внешней и внутренней рам второго карданова подвеса, по которым вычисляют матрицу А2,

где ψ2, υ2 - произвольные углы поворота фотоматрицы второго оптико-локационного блока в последовательности - O2Y2, O2Z2 соответственно, описывающую положение оптической оси второго оптико-локационного блока, связанного с внутренней рамой второго карданова подвеса, определяют координаты X, Y, Z идентичной точки объекта в связанной системе координат,



где фокусные расстояния объективов F1, F2;
В - расстояние между центрами фотоматриц;
 - элементы матриц An (n=1, 2 - номер матрицы),
- элементы матриц An (n=1, 2 - номер матрицы),
на основании полученных координат XYZ идентичной точки объекта измеряют координаты объекта.
Заявляемый способ осуществляется при помощи устройства для измерения координат объекта, включающего разнесенные оптико-локационные блоки, расположенные на летательном аппарате, содержащие каждый фотообъектив и чувствительную фотоматрицу, оптические оси которых направлены вдоль осей ортогональной системы координат и пересекаются в ее начале, которое содержит два разнесенных оптико-локационных блока, два карданова подвеса, каждый из которых имеет внешнюю и внутреннюю рамы, на осях которых установлены датчик угла поворота внешней рамы первого карданова подвеса, датчик угла поворота внутренней рамы первого карданова подвеса, датчик угла поворота внешней рамы второго карданова подвеса, датчик угла поворота внутренней рамы второго карданова подвеса, цифровой вычислитель, включающий модуль вычисления матрицы A1, описывающей положение оптической оси первого оптико-локационного блока, модуль вычисления матрицы А2, описывающей положение оптической оси второго оптико-локационного блока, модуль программной обработки изображений и модуль вычисления координат объекта, при этом оптико-локационные блоки установлены на внутренних рамах своих кардановых подвесов, модуль программной обработки изображений, в котором определяют координаты изображений идентичной точки объекта, расположенного в области пространства, доступной для измерения координат этого объекта, своими первым и вторым входами связан с фотоматрицей второго и фотоматрицей первого оптико-локационных блоков, на которых с помощью объектива второго и первого оптико-локационных блоков формируются изображения объекта, а своим выходом связан с третьим входом модуля вычисления координат объекта, модуль вычисления матрицы A1 своим первым и вторым входами связан с датчиками угла поворота внешней и внутренней рамы первого карданова подвеса, а своим выходом соединен с первым входом модуля вычисления координат объекта, модуль вычисления матрицы А2 своими первым и вторым входами связан с датчиками угла поворота внешней и внутренней рам второго карданова подвеса, а своим выходом соединен с вторым входом модуля вычисления координат объекта, где определяют координаты объекта - X, Y, Z.
Существенными отличительными признаками от прототипа по способу является следующая совокупность действий:
программная обработка изображений, снимаемых с фотоматриц;
определение координат изображений идентичной точки объекта на первой и второй фоточувствительных матрицах; вычисление матрицы A1; вычисление матрицы А2; вычисление координат объекта.
По устройству - наличие следующих элементов:
первого карданова подвеса; второго карданова подвеса; модуля программной обработки изображений; модуля вычисления матрицы A1;
модуль вычисления матрицы Аз; модуль вычисления координат.
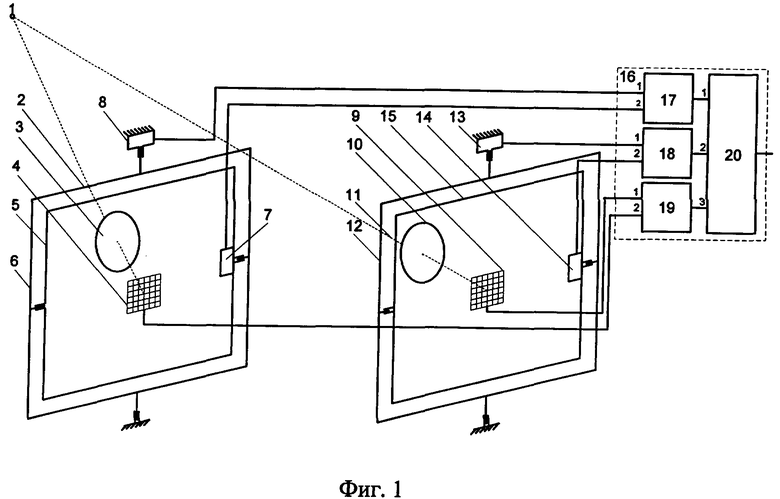
На фиг.1 изображено устройство для измерения координат объекта.
На фиг.2 показана геометрическая связь между изображениями идентичной точки объекта Р на фотоматрицах и точки Р, используемые при выводе выражений для координат X, Y, Z точки Р.
Область пространства, доступная для измерений координат объекта предлагаемым способом показана на фиг.3.
На фиг.4 изображена стереоскопическая схема геометрического типа (аналог).
На фиг.5 приведена схема трехмерной локации точки с помощью трех или двух измерительных систем, оптические оси которых направлены вдоль осей ортогональной системы координат (прототип).
Описание устройства для измерения координат объекта.
Два разнесенных оптико-локационных блока (фиг.1), каждый из которых установлен на внутренней раме (5, 15) своего карданова подвеса. Карданов подвес содержит внешнюю (6, 12) и внутреннюю рамы (5, 15), на осях которых установлены датчики угла поворота рам подвеса (7, 8, 13, 14), и предназначен для обеспечения необходимой ориентации оптической оси (2, 11) оптико-локационного блока с целью расширения области пространства, в которой возможно измерение координат подвижных объектов. Цифровой вычислитель (16), физически выполненный на микропроцессоре, включающий в себя следующие программные модули:
модуль (17) вычисления матрицы A1; модуль (18) вычисления матрицы A2; модуль (19) программной обработки изображений; модуль (20) вычисления координат объекта.
Описание работы устройства для измерения координат объекта
Посредством фотообъективов ОЛБ на фотоматрицах получают изображения объекта, подлежащего измерению координат.
Путем программной обработки изображения, формируемого на фотоматрицах ОЛБ, регистрируют координаты идентичной точки объекта (1). Эти действия осуществляются методами, описанными в [1], например, с использованием оконтуривания изображения и дальнейшего выделения в нем точек излома контура.
Рассмотрим процесс измерения координат объекта посредством двух разнесенных оптико-локационных блоков (ОЛБ), оптические оси которых произвольно ориентированы в пространстве (фиг.2). В общем случае отклонения от идеального положения определяются поворотом вектора OnFn, который опишем матрицей направляющих косинусов Аn

где ψn, υn - произвольные углы поворота n-й фотоматрицы в последовательности - Оnyn, Onzn соответственно (n=1, 2).
Расстояние между центрами фотоматриц (смещения центра 2-й фотоматрицы относительно точки О) обозначим В. Кроме этого, фокусные расстояния объективов F1≠F2.
Связь между единичными ортами системы координат OXYZ и ОnХnYnZn выразим следующим образом:
 или
или 
где  - элементы матрицы направляющих косинусов An,
- элементы матрицы направляющих косинусов An,
i,j, k и in, jn, kn - единичные орты системы координат OXYZ, связанной с ЛА и развернутой вместе с n-й фотоматрицей и объективом системы координат O2X2Y2Z2.
Выразим вектора F1P и F2Р в системах координат O1X1Y1Z1 и O2X2Y2Z2 соответственно, при этом координаты изображений точки Р на фотоматрицах - точек S1 и S2 будем считать известными Y1, Z1 и Y2, Z2. Поскольку точка Р является точкой пересечения векторов F1S1 F2S2, то ее координаты в системе OXYZ найдем в результате совместного решения уравнений прямых F1S1 и F2S2. Вектор F1S1 в системе  . Вектор F2S2 в системе
. Вектор F2S2 в системе  . Подставим в полученные соотношения выражения (2), получим
. Подставим в полученные соотношения выражения (2), получим


Найдем координаты точек F1 и F2 в системе координат OXYZ
Тогда уравнения прямых, определяемых векторами F1S1 и F2S2, будут иметь следующий вид


Решение этих уравнений как системы позволяет найти координаты точки Р, представляющей собой точку пересечения прямых. Выразим из левых частей двойных равенств (6) и (7) значения Y, получим


Приравнивая эти выражения, получим соотношение для вычисления координаты X, которая выражается следующим образом:

Теперь из двойного равенства (6) выразим координату Z

Соотношения (10), (9) и (11) позволяют вычислить три координаты объекта в системе OXYZ. Произвольное расположение ОЛБ относительно друг друга позволяет решать измерительные задачи для объектов с любым расположением (исключение составляют объекты, расположенные вблизи оси OZ).
В связи с уменьшением измерительной базы по мере приближения объекта к оси OZ увеличивается погрешность измерений, кроме этого, вблизи оси OZ измерение становится невозможным, поскольку один из ОЛБ предотвращает видимость объекта другому. Поэтому область пространства, доступная для измерений координат объекта предлагаемым способом, показана на фиг.3 (без учета конструкции летательного аппарата, который эту область также сужает).
Источник информации
1. Техническое зрение роботов./ Под общ. ред. Ю.Г.Якушенкова. - М.: Машиностроение, 1990. - c.l68-176.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2438142C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378664C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МЕРЦАЮЩЕЙ ПОДВИЖНОЙ ТОЧКИ ЗЕМНОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2368920C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРОВНОСТЕЙ ПОВЕРХНОСТИ АВТОДОРОГИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2402037C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МЕРЦАЮЩЕЙ ТОЧКИ ЗЕМНОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2383032C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КАЧКИ АВИАНОСЦА И МЕСТОПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2408848C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ ВЕРТОЛЕТА НА ПОСАДКЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334945C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И УГЛОВ ОТКЛОНЕНИЯ УПРАВЛЯЮЩИХ ПОВЕРХНОСТЕЙ ВЕДУЩЕГО САМОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2349931C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ОТНОСИТЕЛЬНО ЛИНИИ ДОРОЖНОЙ РАЗМЕТКИ | 2010 |
|
RU2422772C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ОТ ЛЕТАТЕЛЬНОГО АППАРАТА ДО ВЕКТОРА ОТНОСИТЕЛЬНОЙ СКОРОСТИ ПРЕПЯТСТВИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326406C1 |


Изобретение относится к навигации и может быть использовано для коррекции инерциальных навигационных систем летательных аппаратов, систем прицеливания и предупреждения столкновений. Достигаемым техническим результатом изобретения является расширение области пространства, в которой возможно измерение координат подвижных объектов. Способ заключается в регистрации изображений объекта посредством двух оптико-локационных блоков, программной обработке оцифрованных изображений, снимаемых с фотоматриц для определения координат изображений идентичной точки на объекте, вычислении матриц, описывающих положения оптических осей оптико-локационных блоков по сигналам с датчиков углов поворота внешней и внутренней рам кардановых подвесов и вычислении координат идентичной точки объекта в связанной системе координат. Устройство, реализующее способ, содержит два разнесенных оптико-локационных блока, каждый из которых установлен на внутренней раме своего карданова подвеса, который содержит внешнюю и внутреннюю рамы, на осях которых установлены датчики угла поворота рам подвеса, и предназначен для обеспечения необходимой ориентации оптической оси оптико-локационного блока с целью расширения области пространства, в которой возможно измерение координат подвижных объектов. Устройство также содержит цифровой вычислитель, включающий в себя модули вычисления матрицы, модуль программной обработки изображений и модуль вычисления координат объекта, определенным образом соединенные между собой. 2 н.п. ф-лы, 5 ил.
1. Способ измерения координат объекта, заключающийся в трехмерной локации точки объекта, расположенного в области пространства, доступной для измерения координат этого объекта, с помощью оптико-локационных блоков, расположенных на летательном аппарате, отличающийся тем, что регистрируют изображения объекта посредством двух оптико-локационных блоков, установленных на внутренних рамах своих кардановых подвесов, каждый из которых имеет внешнюю и внутреннюю рамы, на осях которых установлены датчики углов их поворотов, осуществляют программную обработку оцифрованных изображений объекта, снимаемых с фотоматрицы первого оптико-локационного блока для определения координат Y1, Z1 и фотоматрицы второго оптико-локационного блока для определения координат Y2, Z2 изображений идентичной точки на объекте, снимают сигналы ψ1, υ1 с датчиков углов поворота внешней и внутренней рам первого карданова подвеса, по которым вычисляют матрицу A1
 ,
,
где ψ1, υ1 - произвольные углы поворота фотоматрицы первого оптико-локационного блока в последовательности - O1Y1, O1Z1 соответственно, описывающую положение оптической оси первого оптико-локационного блока, связанного с внутренней рамой первого карданова подвеса, снимают сигналы ψ2, υ2 c датчиков углов поворота внешней и внутренней рам второго карданова подвеса, по которым вычисляют матрицу А2
,
где ψ2, υ2 - произвольные углы поворота фотоматрицы первого оптико-локационного блока в последовательности - O2Y2, O2Z2 соответственно, описывающую положение оптической оси второго оптико-локационного блока, связанного с внутренней рамой второго карданова подвеса, определяют координаты X, Y, Z идентичной точки объекта в связанной системе координат



где фокусные расстояния объективов F1, F2,
В - расстояния между центрами фотоматриц,
aij n - элементы фотоматриц Аn (n=1, 2 - номер матрицы),
на основании полученных координат XYZ идентичной точки объекта измеряют координаты объекта.
2. Устройство для измерения координат объекта, включающее разнесенные оптико-локационные блоки, расположенные на летательном аппарате, содержащие каждый фотообъектив и чувствительную фотоматрицу, оптические оси которых направлены вдоль осей ортогональной системы координат и пересекаются в ее начале, отличающееся тем, что содержит два разнесенных оптико-локационных блока, два карданова подвеса, каждый из которых имеет внешнюю и внутреннюю рамы, на осях которых установлены датчик угла поворота внешней рамы первого карданова подвеса, датчик угла поворота внутренней рамы первого карданова подвеса, датчик угла поворота внешней рамы второго карданова подвеса, датчик угла поворота внутренней рамы второго карданова подвеса, цифровой вычислитель, включающий модуль вычисления матрицы A1, описывающей положение оптической оси первого оптико-локационного блока, модуль вычисления матрицы A2, описывающей положение оптической оси второго оптико-локационного блока, модуль программной обработки изображений и модуль вычисления координат объекта, при этом оптико-локационные блоки установлены на внутренних рамах своих кардановых подвесов, модуль программной обработки изображений, в котором определяют координаты изображений идентичной точки объекта, расположенного в области пространства, доступной для измерения координат этого объекта, своими первым и вторым входами связан с фотоматрицей второго и фотоматрицей первого оптико-локационных блоков, на которых с помощью объектива второго и первого оптико-локационных блоков формируются изображения объекта, а своим выходом связан с третьим входом модуля вычисления координат объекта, модуль вычисления матрицы A1 своим первым и вторым входами связан с датчиками угла поворота внешней и внутренней рамы первого карданова подвеса, а своим выходом соединен с первым входом модуля вычисления координат объекта, модуль вычисления матрицы A2 своими первым и вторым входами связан с датчиками угла поворота внешней и внутренней рам второго карданова подвеса, а своим выходом соединен с вторым входом модуля вычисления координат объекта, где определяют координаты объекта X, Y, Z.
| Техническое зрение роботов | |||
| Под общей ред | |||
| ЯКУШЕНКОВА Ю.Г | |||
| - М.: Машиностроение, 1990, с.168-176 | |||
| ОПТИКО-ЭЛЕКТРОННЫЙ УГЛОМЕР | 1996 |
|
RU2171968C2 |
| СПОСОБ ЛОКАЦИИ ИСТОЧНИКА ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2275652C2 |
| RU 2003108536 A, 27.10.2004 | |||
| US 2006227014 A1, 12.10.2006 | |||
| US 5638162 A, 10.06.1997 | |||
| US 2005285774 A1, 29.12.2005 | |||
| WO 2006135916 A1, 21.12.2006. | |||

