Область применения изобретения
Настоящее изобретение в общем имеет отношение к системам возврата (поиска) угнанного транспортного средства (автомобиля), а в частности, к входящему в такую систему блоку определения местоположения транспортного средства с улучшенным управлением режимом электропитания.
Предпосылки к созданию изобретения
Удачная и популярная система возврата автомобиля заявителя, которая продается под торговой маркой LoJack®, содержит небольшой электронный блок определения местоположения транспортного средства (VLU) с ответчиком, спрятанным в автомобиле, частную сеть мачт связи, каждая из которых содержит выносной передающий блок (RTU), один или несколько автомобилей правоохранительных органов, оборудованных блоками определения местоположения транспортного средства (VTU), и сетевой центр с базой данных потребителей, которые купили VLU. Сетевой центр взаимодействует с Национальным криминальным информационным центром США. Для входа в эту базу данных необходимо ввести регистрационный (VIN) номер автомобиля потребителя и код идентификации, связанный с VLU заказчика (потребителя).
Когда изделие LoJack® потребителя сообщает, что автомобиль был угнан, номер регистрации автомобиля сообщают в центр правоохранительных органов для ввода в базу данных угнанных автомобилей. Сетевой центр содержит программное обеспечение, которое взаимодействует с базой данных центра правоохранительных органов, чтобы сравнивать номер регистрации угнанного автомобиля с базой данных сетевого центра, которая содержит номера регистрации, соответствующие кодам идентификации VLU. При наличии совпадения между номером регистрации угнанного автомобиля и кодом идентификации VLU, что будет в том случае, когда угнанный автомобиль оборудован VLU и когда центр сообщил, что автомобиль был угнан, сетевой центр устанавливает связь с дистанционными терминалами различных мачт связи (в настоящее время в США имеется 130 мачт связи), и каждая мачта передает сообщение, чтобы активировать ответчик специфического VLU, имеющего код идентификации.
Таким образом, активируется ответчик VLU в угнанном автомобиле и начинает передавать однозначно определяемый код идентификации VLU. VTU любого из автомобилей правоохранительных органов, находящегося поблизости от угнанного автомобиля, получает этот код ответчика VLU и на основании уровня сигнала и информации о направлении соответствующий автомобиль правоохранительных органов может начинать операции возврата (поиска) угнанного автомобиля. Смотри, например, патенты CШA Nos. 4,177,466; 4,818,988; 4,908,609; 5,704,008; 5,917,423; 6,229,988; 6,522,698 и 6,665,613.
Так как блок VLU получает питание от автомобильной батареи в VLU необходимо использовать средство управления электропитанием, чтобы VLU не разряжал автомобильную батарею. Предложенное ранее заявителем известное средство предусматривает программирование режима запуска VLU и проверку сообщений от мачт связи только периодически, например, каждые 8 секунд в течение 0.2 секунды. Переключение дежурного режима и режима запуска синхронизировано с расписанием передач одной мачты связи (см. патент США No.6,229,988).
Однако, если автомобиль, снабженный запрограммированным таким образом VLU, при движении выходит из диапазона передачи такой мачты, когда VLU запускается, от этой мачты не будут получать сигнала. Поэтому в соответствии с известной методикой VLU должен находиться в режиме запуска в течение более длительного времени, чтобы надежно принимать сигнал от мачты, так как VLU не имеет памяти о том, в каком временном интервале мачта будет производить возможную передачу. Это приводит к повышению энергопотребления.
Сущность изобретения
Задачей настоящего изобретения является создание блока определения местоположения транспортного средства с улучшенным управлением режимом электропитания.
Другой задачей настоящего изобретения является создание такого блока определения местоположения транспортного средства, в котором режим запуска и дежурный режим синхронизированы с источником связи, передающим самый мощный сигнал.
Еще одной задачей настоящего изобретения является создание такого блока определения местоположения транспортного средства, который непрерывно производит обновление своей памяти, чтобы запоминать идентичность одной или нескольких мачт связи с самыми мощными сигналами.
В соответствии с настоящим изобретением используют более эффективную подсистему управления режимом электропитания для VLU, которая скомпонована так, чтобы поочередно вводить (задавать) дежурный режим и режим запуска, чтобы синхронизировать режим запуска с источником связи (например, с мачтой связи), передающим самый мощный сигнал, и чтобы проверять уровень сигнала по меньшей мере одного дополнительного источника связи в последовательности.
Однако в соответствии с другими вариантами настоящее изобретение для осуществления всех этих задач не ограничено в выборе структур и способов, позволяющих осуществить эти задачи.
В соответствии с настоящим изобретением предлагается блок определения местоположения транспортного средства с улучшенным управлением режимом электропитания. Приемник принимает сигнал от сети источников связи, а подсистема управления уровнем сигнала определяет, какой из источников связи передает самые мощные сигналы. Подсистема управления режимом электропитания является зависимой от подсистемы управления уровнем сигнала и скомпонована так, чтобы: поочередно вводить дежурный режим и режим запуска, синхронизировать режим запуска с источником связи, передающим самый мощный сигнал, и проверять уровень сигнала по меньшей мере одного дополнительного источника связи в соответствии с предопределенной последовательностью.
Обычно подсистема управления режимом электропитания скомпонована так, чтобы проверять и запоминать идентичность двух источников связи с двумя самыми мощными сигналами, переключаться на синхронизацию от любого источника связи, который имеет более мощный сигнал, чем самый мощный сигнал двух запомненных источников связи, и запоминать идентичность любого источника связи, имеющего более мощный сигнал, чем сигнал любого ранее запомненного источника связи.
В соответствии с одним из вариантов имеется n (например, восемь) источников связи, каждый из которых передает сигнал в разное время каждые n секунд. Преимущественно система управления режимом электропитания скомпонована так, чтобы включать режим запуска (пусковой режим), в котором проверяют все источники связи. В соответствии с предпочтительным вариантом подсистема управления режимом электропитания выполнена в виде микроконтроллера, который скомпонован так, чтобы выключать питание приемника во время дежурного режима и подавать питание на приемник во время режима запуска. Одна примерная подсистема управления уровнем сигнала содержит схему демодуляции, встроенную в приемопередатчик.
Способ проверки сообщений от сети источников связи в соответствии с настоящим изобретением предусматривает первоначальную проверку уровня сигнала множества источников связи, запоминание идентичности источников связи с двумя самыми мощными сигналами, поочередное введение дежурного режима и режима запуска, причем режим запуска синхронизирован с источником связи, имеющим самый мощный сигнал, проверку уровня сигнала одного дополнительного источника связи, переключение на синхронизацию от дополнительного источника связи, если указанный источник имеет сигнал мощнее, чем сигнал запомненного источника связи с самым мощным сигналом, и замену идентичности любого запомненного источника связи, если дополнительный источник связи, проверенный в последовательности, имеет более мощный сигнал, чем сигнал указанного запомненного источника связи.
Для блоков VLU и других электронных приемников, которые принимают сигнал от сети источников связи, подсистема управления уровнем сигнала определяет, какой из источников связи передает самые мощные сигналы. Подсистема управления режимом электропитания является зависимой от подсистемы управления уровнем сигнала и скомпонована так, чтобы: поочередно вводить дежурный режим и режим запуска, синхронизировать режим запуска с источником связи, передающим самый мощный сигнал, и проверять уровень сигнала по меньшей мере одного дополнительного источника связи, для обеспечения того, чтобы режим запуска был синхронизирован с источником связи, передающим самый мощный сигнал.
Один вариант системы управления режимом электропитания блока определения местоположения транспортного средства содержит память и контроллер, сконфигурированный так, чтобы поочередно выдавать сигналы дежурного режима и режима запуска, запоминать в указанной памяти идентичность по меньшей мере первого источника связи, имеющего самый мощный сигнал, проверять уровень сигнала по меньшей мере одного другого источника связи во время режима запуска, синхронизировать режим запуска с источником связи, идентифицированным в указанной памяти, и обновлять память, чтобы запоминать идентичность другого источника связи, имеющего более мощный сигнал, чем первый источник связи.
Указанные ранее и другие задачи, характеристики и преимущества изобретения будут более ясны из последующего детального описания, данного в качестве примера, не имеющего ограничительного характера и приведенного со ссылкой на сопроводительные чертежи.
Краткое описание чертежей
На фиг.1 показана блок-схема, где можно видеть первичные компоненты системы возврата (поиска) автомобиля в соответствии с настоящим изобретением.
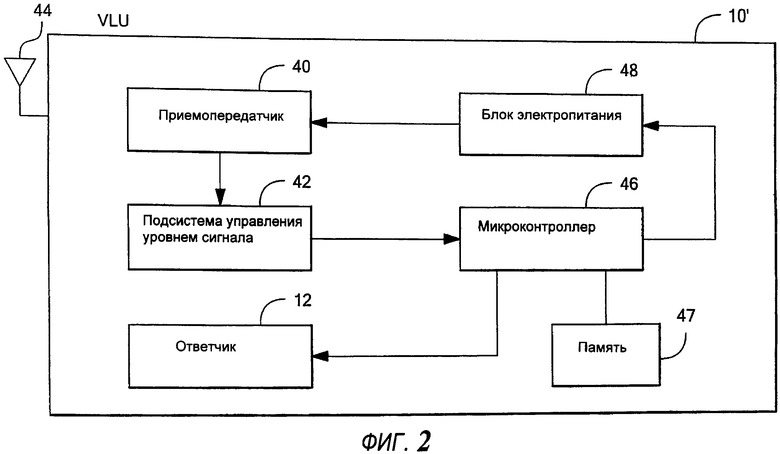
На фиг.2 показана блок-схема, где можно видеть первичные компоненты блока определения местоположения транспортного средства в соответствии с настоящим изобретением.
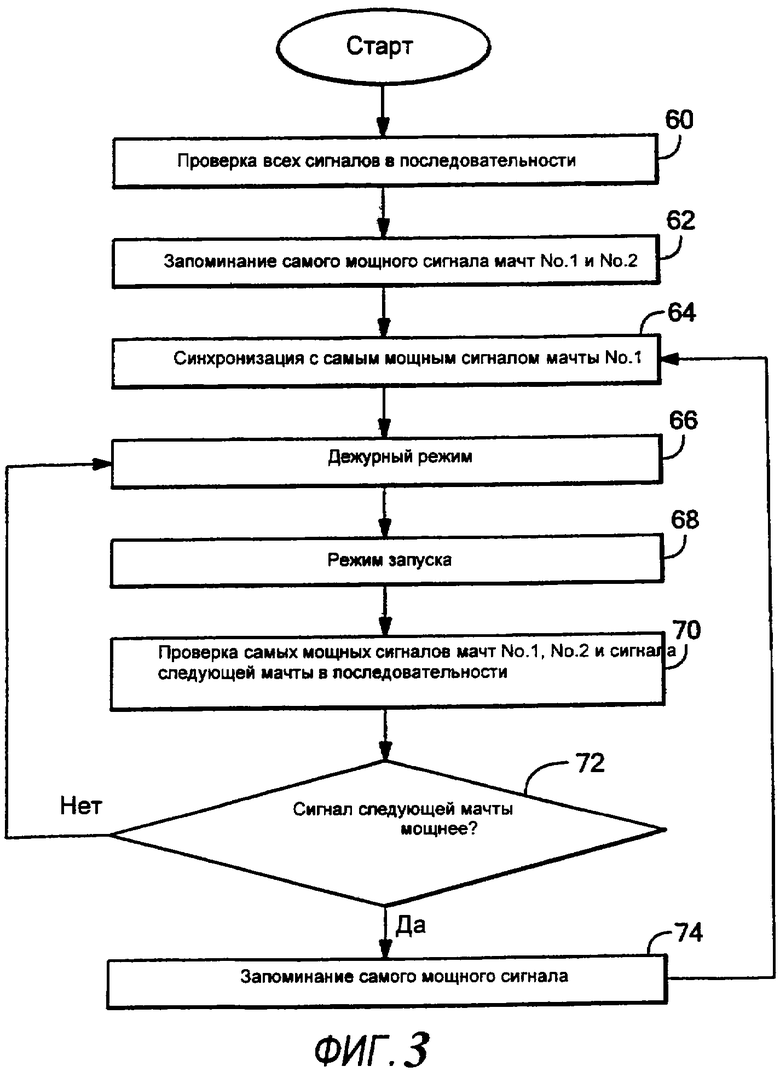
На фиг.3 показана схема последовательности операций, где можно видеть первичные операции одного примера программирования микроконтроллера блока определения местоположения транспортного средства, показанного на фиг.2, связанного с управлением режимом электропитания.
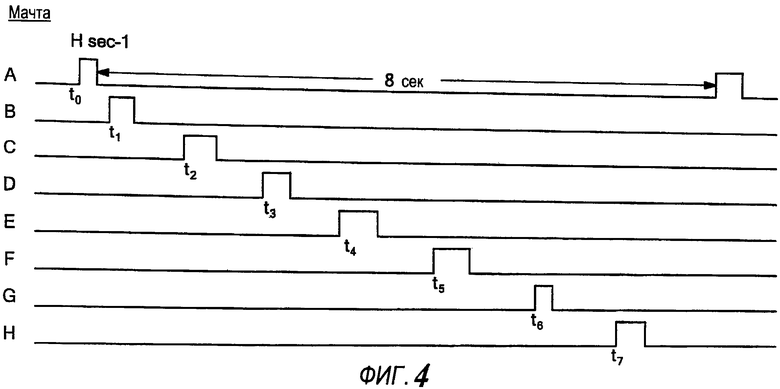
На фиг.4 схематично показана временная диаграмма, где можно видеть временной интервал синхронизации для примера сети связи, которая содержит восемь мачт связи.
Подробное описание изобретения
Следует иметь в виду, что кроме описанных далее предпочтительного варианта или вариантов возможны и другие варианты настоящего изобретения, реализованные или осуществленные различным образом. Таким образом, следует иметь в виду, что настоящее изобретение не ограничивается в его применении деталями конструкции и компоновками компонентов, указанными в последующем описании или показанными на чертежах. Хотя здесь описан только один вариант, изобретение не ограничивается только этим вариантом.
Как это обсуждалось в приведенном здесь выше разделе «Предпосылки к созданию изобретения», удачная и популярная система возврата автомобилей, которая продается под торговой маркой LoJack®, содержит небольшой электронный блок 10 определения местоположения транспортного средства (VLU), показанный на фиг.1, с ответчиком 12, спрятанным в автомобиле 14, сеть мачт 16 связи, каждая из которых имеет дистанционный терминал (RTU) 18, один или несколько автомобилей 20 правоохранительных органов, снабженных блоком 22 определения местоположения транспортного средства (VTU), и сетевой центр 24.
Когда изделие LoJack® потребителя сообщает, что автомобиль был угнан, номер регистрации автомобиля сообщают в центр 26 правоохранительных органов для ввода в базу 28 данных угнанных автомобилей. Сетевой центр 24 содержит программное обеспечение, которое взаимодействует с базой 28 данных центра 26 правоохранительных органов, чтобы сравнивать номер регистрации угнанного автомобиля с базой 30 данных сетевого центра 24, которая содержит номера регистрации, соответствующие кодам идентификации VLU. При наличии совпадения между номером регистрации угнанного автомобиля и кодом идентификации VLU, что будет в том случае, когда угнанный автомобиль 14 оборудован VLU 10 и когда центр 24 сообщил, что автомобиль 14 был угнан, сетевой центр 24 устанавливает связь с дистанционными терминалами 18 различных мачт 16 связи, и каждая мачта передает сообщение, чтобы активировать ответчик 12 специфического VLU 10, имеющего код идентификации.
Ответчик 12 VLU 10 в угнанном автомобиле 14 после активации начинает передавать однозначно определяемый код идентификации VLU. VTU 22 автомобиля 20 правоохранительных органов, находящегося поблизости от угнанного автомобиля 14, получает этот код ответчика VLU и на основании уровня сигнала и информации о направлении соответствующий автомобиль правоохранительных органов может начинать операции возврата (поиска) угнанного автомобиля 14.
Показанный на фиг.2 VLU 10′ в соответствии с настоящим изобретением содержит приемопередатчик 40 или в соответствии с другим примером приемник, не обладающим возможностями передачи. Подсистема 42 управления уровнем сигнала в соответствии с одним из вариантов представляет собой схему демодулятора, выполненную в виде микросхемы внутри приемопередатчика 40, которая выдает сигнал, идентифицирующий и характеризующий уровень сигнала для всех сигналов, принятых приемопередатчиком 40 при помощи антенны 44, от сети связи и одной или нескольких мачт 16 связи, показанных на фиг.1.
Микроконтроллер 46, показанный на фиг.2, (например, микроконтроллер модель No. MSP430 фирмы Texas Instrument), который принимает выходной сигнал подсистемы 42, запрограммирован так, чтобы оценивать уровень сигнала для всех сигналов, принятых приемопередатчиком 40, а также запрограммирован так, чтобы побуждать приемопередатчик 40 поочередно входить в дежурный режим и режим запуска, чтобы экономить энергию батареи за счет подачи сигнала на блок 48 электропитания в соответствии со схемой последовательности операций, показанной на фиг.3. Память 47 на фиг.2 показана отдельной от контроллера 47, однако, как это хорошо известно специалистам в данной области, многие микроконтроллеры имеют внутреннюю память, как и показанный примерный контроллер.
В следующем примере, показанном на фиг.4, используют восемь источников связи или LoJack® мачт А-Н, передающих сигналы на VLU 10′, показанный на фиг.2. Каждая передача сигнала синхронизации происходит в разное время t0-t7 каждые восемь секунд, причем возможно получение сообщения (в случае угона автомобиля), в момент получения которого микроконтроллер 46, показанный на фиг.2, будет активировать ответчик 12.
Однако, если оставить приемопередатчик 40 постоянно включенным для проверки такого сообщения, он будет быстро разряжать батарею автомобиля. В соответствии с настоящим изобретением микроконтроллер 46 при запуске, операция 60 на фиг.3, проверяет уровень сигнала мачт А-Н за счет анализа выходных сигналов подсистемы 42 управления уровнем сигнала. В этом режиме проверки регистрируют уровень сигнала каждой мачты, и если какой-либо сигнал несет сообщение, то сообщение воздействует на микроконтроллер 46.
Идентичность двух самых мощных сигналов мачт запоминают в памяти 47, показанной на фиг.2, в операции 62 на фиг.3, и затем синхронизируют режим запуска, операция 64, с самым мощным из этих двух сигналов. Затем вводят дежурный режим, и, когда режим запуска активируют при синхронизации с мачтой связи, имеющей самый мощный сигнал, уровень сигнала двух ранее запомненных мачт проверяют, как и уровень сигнала одной дополнительной мачты связи в последовательности.
В качестве примера предположим, что мачты А и В на фиг.4 передают самые мощные сигналы, по причине их близости к VLU 10, показанному на фиг.2. Если мачта А имеет более мощный сигнал, чем мачта В, производят синхронизацию режима запуска с сигналом мачты А. Таким образом, в каждом цикле, (типичная длительность режима запуска составляет около 8 сек), контроллер 46 будет подавать питание на приемопередатчик 40, за счет подачи сигнала на источник 48 электропитания в момент времени t0, фиг.4, и будет находиться в дежурном режиме во временном промежутке t1-t7, операции 66-68. В течение следующего временного промежутка запуска проверяют уровень сигнала двух ранее запомненных мачт (А и В), также как и уровень сигнала следующей мачты, которая в соответствии с предопределенной последовательностью в этом примере представляет собой мачту С, операция 70. Таким образом, если в любой момент времени за счет движения автомобиля другая мачта в последовательности А-Н будет иметь более мощный сигнал, чем а) мачта, с которой контроллер 46 синхронизировал режим запуска, или b) запомненная идентичность мачты со вторым самым мощным сигналом, то идентичность новой мачты запоминают в памяти 47, показанной на фиг.2, в операциях 72-74 на фиг.3, и обеспечивают в операции 64 синхронизацию с мачтой с самым мощным сигналом.
Однако предположим, что мачта С не имеет более мощного сигнала, чем любая из мачт А или В, и что режим запуска и дежурный режим все еще синхронизированы с мачтой А в операции 66. В операциях 68 и 70 проверяют мачты А, В и теперь D, и если уровень сигнала мачты D не превышает уровень сигнала любой из мачт А или В, то опять вводят дежурный режим, операция 66. После введения режима запуска в операции 68, все еще при синхронизации от мачты А, проверяют уровень сигнала мачт А, В и теперь Е, операция 70.
Теперь, если уровень сигнала мачты Е превышает уровень сигнала мачты В, но не превышает уровень сигнала мачты А, идентичность мачты Е запоминают в памяти 47, показанной на фиг.2, в операции 74 на фиг.3, заменяя мачту В. Однако в операции 64 режим запуска все еще синхронизирован с имеющей самый мощный сигнал мачтой, а именно, с мачтой А при проведении операций 64-68.
Затем проверяют уровни сигналов мачт А, Е и F, операция 70. Предположим, что в операции 72 уровень сигнала мачты F будет выше уровня сигнала мачт А и Е однако уровень сигнала мачты А все еще выше уровня сигнала мачты Е. Теперь синхронизацию производят от мачты F в операции 64 и в операции 70 проверяют мачты F, А и G и т.д.
В другом примере, предположим, что мачты С и D первоначально имеют самые мощные первый и второй сигналы, поступающие на VLU. Режим запуска первоначально синхронизирован с мачтой С и идентичность мачт С и D запомнена в памяти. После первого дежурного режима проверяют уровень сигнала мачт С, D и Е, а затем следующих мачт С, D и F, и затем мачт С, D и G, и затем мачт С, D и Н, и т.д., - по одной дополнительной мачте во время каждого последующего режима запуска. Если во время этого цикла режим запуска/дежурный режим, мачты С и D остаются самыми мощными двумя мачтами, то сохраняют синхронизацию с мачтой С и в памяти продолжают хранить идентичность мачт С и D. Если во время следующего цикла, когда проверяют мачту А, находят, что ее сигнал мощнее сигнала мачты D, но не С, память обновляют, чтобы запоминать идентичность мачт С и А, и сохраняют синхронизацию в соответствии с режимом передачи мачты С; и во время каждого следующего режима запуска проверяют уровень сигнала мачт С, А и В; С, А и D; С, А и Е; С, А и F … и т.д.
Указанным образом идентичность мачт, которые передают два самых мощных сигнала, всегда хранят в памяти, при этом контроллер 46, показанный на фиг.2, в последовательности проверяет другую мачту в режиме запуска, чтобы хранить в памяти 47, показанной на фиг.2, идентичность двух мачт, которые передают самые мощные сигналы. Кроме того, контроллер 46 обеспечивает синхронизацию режима запуска только с одной мачтой, передающей самый мощный сигнал. Питание сохраняют, однако теперь так, чтобы не было пропущено ни одно сообщение связи от любой мачты в сети. Для введения дежурного режима микроконтроллер 46 посылает сигнал на блок 48 электропитания, который затем выключает питание приемопередатчика 40. Для входа в режим запуска микроконтроллер 46 посылает сигнал на блок 48 электропитания, который затем вновь подает питание на приемопередатчик 40, так чтобы он мог получать сигналы при помощи антенны 44.
В приведенном выше со ссылкой на фиг.3-4 примере предполагали, что имеется восемь мачт в данном регионе, постоянно хранили в памяти два самых мощных сигнала двух мачт, и проверяли одну дополнительную мачту в специфической последовательности, однако следует иметь в виду, что этот пример не имеет ограничительного характера: в соответствии с настоящим изобретением может быть использовано любое число мачт и любая комбинация мачт и запоминание любых комбинаций мачт. В приведенном выше примере также предполагали, что способ управления режимом электропитания в соответствии с настоящим изобретением применим к VLU системе возврата (поиска) автомобиля, однако следует иметь в виду, что настоящее изобретение может найти применение в любых получающих питание от батарей электронных устройствах, а не только в различных VLU.
Таким образом, несмотря на то, что некоторые специфические характеристики настоящего изобретения показаны на некоторых чертежах, но не показаны на других чертежах, это использовано только для удобства, причем в соответствии с настоящим изобретением любая характеристика может быть использована в сочетании с любой другой характеристикой или со всеми другими характеристиками. Кроме того, все раскрытые варианты настоящего изобретения необязательно приведены как единственно возможные варианты. Специалисты в данной области могут найти и другие варианты, которые не выходят за рамки настоящего изобретения, определенного в формуле изобретения.
Кроме того, специалистами в данной области после ознакомления с описанием настоящего изобретения могут быть введены различные изменения, в том числе возможные эквиваленты признаков формулы изобретения, однако все такие изменения следует считать соответствующими сущности настоящего изобретения и не выходящими за рамки формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА (ВАРИАНТЫ) И СПОСОБ (ВАРИАНТЫ) ОБНАРУЖЕНИЯ И СЛЕЖЕНИЯ | 2009 |
|
RU2452032C2 |
| СПОСОБ КОМПЛЕКСНОЙ ОХРАНЫ ПОДВИЖНЫХ И НЕПОДВИЖНЫХ ОБЪЕКТОВ | 2000 |
|
RU2159190C1 |
| СПОСОБ ПОИСКА И ПЕРЕХВАТА УГНАННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2228274C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА КОНТРОЛЯ НАД УЧАСТНИКАМИ ДОРОЖНОГО ДВИЖЕНИЯ И ПРЕДУПРЕЖДЕНИЯ ВОЗНИКНОВЕНИЯ ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ ПРИ ДОРОЖНОМ ДВИЖЕНИИ | 2006 |
|
RU2324980C1 |
| СПОСОБ ИНДИКАЦИИ УГНАННЫХ АВТОТРАНСПОРТНЫХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2093893C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ УСТРОЙСТВАМИ ЗАКРЕПЛЕНИЯ ПОЕЗДА | 2015 |
|
RU2598919C1 |
| СИСТЕМА МОНИТОРИНГА ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2004 |
|
RU2243113C1 |
| СПОСОБ РАДИОПОИСКА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2006 |
|
RU2320504C1 |
| РАДИОПОИСКОВАЯ СИСТЕМА ДЛЯ ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2244642C1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ | 2002 |
|
RU2242382C2 |
Изобретение относится к области радиотехники и может быть использовано для поиска, обнаружения и определения текущего местоположения транспортных средств. В изобретении предлагается блок определения местоположения транспортного средства с улучшенным управлением режимом электропитания. Приемник принимает сигнал от сети источников связи. Подсистема управления уровнем сигнала определяет, какой из источников связи передает самые мощные сигналы. Подсистема управления режимом электропитания является зависимой от подсистемы управления уровнем сигнала и скомпонована так, чтобы поочередно вводить дежурный режим и режим запуска, синхронизировать режим запуска с источником связи, передающим самый мощный сигнал, и проверять уровень сигнала по меньшей мере одного дополнительного источника связи в соответствии с предопределенной последовательностью. Технический результат - уменьшение энергопотребления. 5 н. и 8 з.п. ф-лы, 4 ил.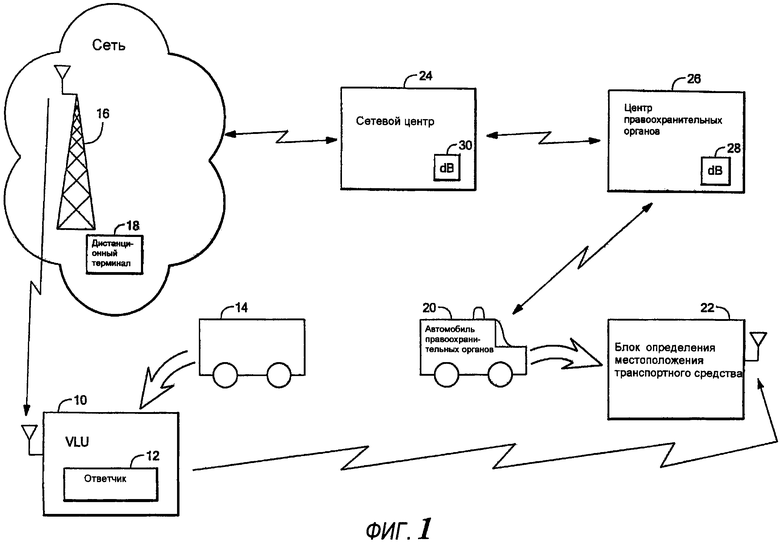
1. Устройство определения местоположения транспортного средства с управлением режима электропитания, содержащий
приемник, который принимает сигнал от сети источников связи;
подсистему управления уровнем сигнала, которая определяет, какой из источников связи передает самые мощные сигналы;
подсистему управления режимом электропитания, зависимую от подсистемы управления уровнем сигнала и выполненную с возможностью
поочередно вводить дежурный режим и режим запуска, синхронизировать режим запуска с источником связи, передающим самый мощный сигнал, и
проверять уровень сигнала по меньшей мере одного дополнительного источника связи в соответствии с предопределенной последовательностью.
2. Устройство по п.1, в котором подсистема управления режимом электропитания выполнена с возможностью
проверять и запоминать идентичность двух источников связи с двумя самыми мощными сигналами,
переключаться на синхронизацию от любого источника связи, имеющего более мощный сигнал, чем самый мощный сигнал двух запомненных источников связи, и
запоминать идентичность любого источника связи с более мощным сигналом, чем сигнал любого ранее запомненного источника связи.
3. Устройство по п.1, в котором имеются n источников связи, каждый из которых передает сигнал в разное время каждые n секунд.
4. Устройство по п.3, в котором n равно 8.
5. Устройство по п.1, в котором система управления режимом электропитания выполнена с возможностью проверки всех источников связи в режиме запуска.
6. Устройство по п.1, в котором подсистема управления режимом электропитания выполнена в виде микроконтроллера.
7. Устройство по п.1, в котором подсистема управления режимом электропитания выполнена с возможностью выключать питание приемника во время дежурного режима и подавать питание на приемник во время режима запуска.
8. Устройство по п.1, в котором подсистема управления уровнем сигнала содержит схему демодуляции.
9. Устройство по п.8, в котором схема демодуляции является компонентом приемника.
10. Способ управления электропитанием, включающий следующие стадии:
первоначальная проверка уровня сигнала множества источников связи;
запоминание идентичности источников связи с двумя самыми мощными сигналами;
поочередное принудительное введение дежурного режима и режима запуска электропитания устройства, причем режим запуска синхронизирован с источником связи, имеющим самый мощный сигнал;
проверка уровня сигнала одного дополнительного источника связи;
переключение на синхронизацию от дополнительного источника связи, если указанный источник имеет сигнал мощнее, чем запомненный источник связи с самым мощным сигналом;
замена идентичности любого запомненного источника связи, если дополнительный источник связи, проверенный в последовательности, имеет сигнал мощнее, чем сигнал указанного запомненного источника связи.
11. Система управления электропитанием, содержащая
приемник, который принимает сигнал от сети источников связи;
подсистему управления уровнем сигнала, которая определяет, какой из источников связи передает самые мощные сигналы; и
подсистему управления режимом электропитания, зависимую от подсистемы управления уровнем сигнала, выполненную с возможностью
поочередно вводить дежурный режим и режим запуска,
синхронизировать режим запуска с источником связи, передающим самый мощный сигнал, и
проверять уровень сигнала по меньшей мере одного дополнительного источника связи, чтобы обеспечивать синхронизацию режима запуска от источника связи, передающего самый мощный сигнал.
12. Устройство определения местоположения транспортного средства с управлением режима электропитания, содержащее
приемник, который принимает сигнал от сети источников связи;
подсистему управления уровнем сигнала, которая определяет, какой из источников связи передает самые мощные сигналы; и
подсистему управления режимом электропитания, зависимую от подсистемы управления уровнем сигнала и выполненную с возможностью
проверять и запоминать идентичность двух источников связи с двумя самыми мощными сигналами,
поочередно принудительно вводить дежурный режим и режим запуска устройства, причем режим запуска синхронизирован с источником связи, передающим самый мощный сигнал,
проверять уровень сигнала по меньшей мере одного дополнительного источника связи в соответствии с предопределенной последовательностью,
переключаться на синхронизацию от любого источника связи, имеющего более мощный сигнал, чем самый мощный сигнал двух запомненных источников связи, и
запоминать идентичность любого источника связи, имеющего более мощный сигнал, чем сигнал любого ранее запомненного источника связи.
13. Система управления режимом электропитания устройства определения местоположения транспортного средства, которая содержит память и контроллер, сконфигурированный с возможностью
поочередно задавать дежурный режим и режим запуска сигналов,
хранить в указанной памяти идентичность по меньшей мере первого источника связи, имеющего самый мощный сигнал,
проверять уровень сигнала по меньшей мере одного другого источника связи во время режима запуска,
синхронизировать режим запуска от источника связи, идентифицированного в указанной памяти, и
обновлять память, чтобы запоминать идентичность другого источника связи, имеющего более мощный сигнал, чем первый источник связи.
| РАДИОПОИСКОВАЯ СИСТЕМА ДЛЯ ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2244642C1 |
| Приспособление к индикатору для определения момента вспышки в двигателях | 1927 |
|
SU10474A1 |
| МАСЛОБОЙКА | 1922 |
|
SU10917A1 |
| US 2004207510 А1, 21.10.2004. | |||

