Изобретение относится к управляемым электрическим двигателям, в частности к вентильным двигателям, и может быть использовано в регулируемых приводах переменного тока.
Известен способ управления трехфазным вентильным двигателем [Соколовский Г.Г. Электроприводы переменного тока с частотным управлением. М.: Издательский центр «Академия», 2006, С.122], принятый за прототип, заключающийся в том, что фазные управляющие напряжения задания формируют в преобразователе координат ПК с помощью обратных координатных преобразований Парка-Кларка из вращающейся ортогональной системы координат, связанной с ротором электродвигателя, в трехфазную систему синусоидальных задающих сигналов, связанную со статором электродвигателя в функции сигнала угла с датчика поворота ротора электродвигателя, с последующей широтно-импульсной модуляцией фазных напряжений и преобразованием их в трехфазном автономном инверторе напряжения (АИН) в напряжения на статорных обмотках синхронного электродвигателя. Образовавшиеся при этом фазные и линейные напряжения имеют симметричную синусоидальную форму и сдвинуты между собой по фазе на 120 электрических градусов.
Синусоидальные фазные управляющие напряжения задания при этом выражаются формулами:
где UÀz(t), UBz(t) è UCz(t) - фазные управляющие напряжения задания;
uq и ud - проекции вектора задания в ортогональной вращающейся системе координат;
φz=θ+φ0+δ - аргумент задания в трехфазной неподвижной системе координат;
θ - угол поворота ротора электродвигателя с учетом количества пар полюсов (электрический угол);

δ - поправочный угол, учитывающий скорость вращения ротора электродвигателя.
Недостатком данного способа является то, что все шесть ключей автономного трехфазного инвертора напряжения непрерывно коммутируются с частотой ШИМ, что приводит к повышенным потерям в автономном трехфазном инверторе напряжения и, как следствие, к снижению кпд вентильного двигателя.
Заявленное техническое решение направлено на повышение кпд вентильного двигателя за счет уменьшения динамических (коммутационных) потерь в автономном трехфазном инверторе напряжения из состава вентильного двигателя.
Данная задача решается тем, что в известном способе управления вентильным двигателем, основанном на преобразовании напряжений задания в преобразователе координат в фазные управляющие напряжения задания в функции сигнала угла с датчика поворота ротора электродвигателя, преобразовании фазных управляющих напряжений задания в трехфазном автономном инверторе напряжения с широтно-импульсным модулятором на входе в питающее трехфазное напряжение статора синхронного электродвигателя, фазные управляющие напряжения задания формируют в преобразователе координат в соответствии с алгоритмом:
1) при 
2) при 
3) при 

Сущность изобретения поясняется фигурами:
на фиг.1 представлена структурная схема, реализующая способ управления вентильным двигателем;
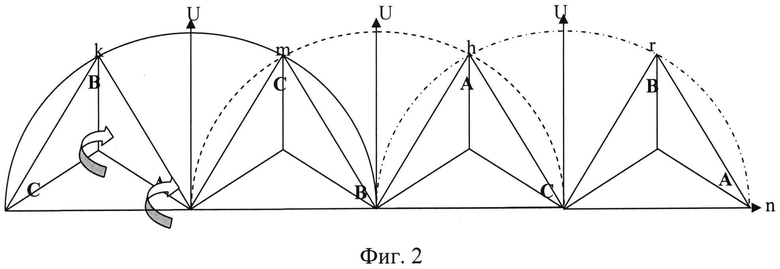
- на фиг.2 показана графическая интерпретация предлагаемого способа;
- на фиг.3 приведены графики фазного управляющего (а) и линейного (б) напряжений.
Предлагаемый способ управления трехфазным вентильным двигателем реализуется в устройстве (фиг.1), содержащем последовательно соединенные между собой преобразователь координат (ПК) 1, автономный трехфазный инвертор напряжения с широтно-импульсной модуляцией на входе (АИН) 2 и синхронный исполнительный электродвигатель (ЭД) 3 с датчиком угла поворота ротора (ДУПР) 4. В ПК 1 формируются алгоритмы выработки фазных управляющих напряжений UAz(t), UBz(t), UCz(t) по формулам (2), (3) и (4), которые, после широтно-импульсной модуляции и усилению в АИН 2, управляют синхронным исполнительным ЭД 3. Сигнал угла поворота ротора ЭД 3, необходимый для формирования фазных управляющих напряжений UAz(t), UBz(t), UCz(t), вырабатывается датчиком угла поворота ротора ДУПР 4, механически соединенным с валом ЭД 3.
Принцип предложенного способа управления заключается в том, что потенциал одной из фаз принимается равным нулю и при вращении магнитного поля статора электродвигателя удерживается в этом состоянии на участке 120 электрических градусов. Потенциалы двух других фаз при этом вычисляются из условия, что треугольник линейных напряжений АВС (фиг.2) поворачивается последовательно вокруг одной из трех вершин. Равенство нулю фазных напряжений означает, что на одном из трех участков φz одно из фазных напряжений не подвергается широтно-импульсной модуляции.
Геометрическая интерпретация предлагаемого способа показана на фиг.2. На нем представлена последовательность из трех циклов поворота треугольника линейных напряжений АВС, имитирующих поворот вектора магнитного потока статора электродвигателя на 360 электрических градусов по часовой стрелке.
В первом цикле вершины В и С треугольника АВС вращаются вокруг точки «1» (вершина А). Поворот векторов фазных напряжений на угол φz (угол задания) вызывает поворот линейных напряжений на тот же угол φz, т.к. эти векторы жестко связаны между собой.
Вектор линейного напряжения 
Вектор линейного напряжения 



Когда (при φz=240°) вершина С придет в точку 3, начинается третий цикл, в котором поворот треугольника АВС осуществляется вокруг вершины С. Через 120° (при φz=360°) цикл повторяется снова, начиная с вершины А.
В предлагаемом способе, если совместить φz с аргументом вектора 
В фазных управляющих напряжениях задания по данному алгоритму формируются прямолинейные горизонтальные отрезки, один раз за период протяженностью по 120° электрических градусов. Фаза на этих отрезках «привязана» к минусу (или к «земле») питающего напряжения. Поскольку линейные напряжения на трехфазной обмотке статора представляют собой разность соответствующих фазных напряжений, форма линейных напряжений остается синусоидальной.
На фиг.3 показаны графики управляющего фазного напряжения задания а и результирующего сглаженного линейного напряжения б, полученные путем моделирования.
Из графиков видно, что на участках с постоянным уровнем напряжения, коммутация фазы отсутствует. Преимуществом предлагаемого способа по сравнению с прототипом является отсутствие коммутации с частотой ШИМ двух ключей инвертора из шести, что приводит к уменьшению коммутационных потерь в автономном инверторе напряжения и повышению кпд вентильного привода в целом, особенно на больших скоростях вращения электродвигателя.
Современная база полупроводниковых и микропроцессорных устройств позволяет реализовать устройство, реализующее данный способ управления вентильным двигателем. Так, в действующей модели заявляемого вентильного двигателя схема его управления была построена на основе микроконтроллера dsPIC30F40K-30РТ Microchip Technology/, а схема реализации автономного инвертора напряжения с широтно-импульсной модуляцией на входе описана в [Соколовский Г.Г. Электроприводы переменного тока с частотным управлением. М.: Издательский центр «Академия», 2006, С.88].
В ОАО «ВНИИ «Сигнал» был изготовлен опытный образец и его эксплуатация подтвердила вышеуказанный технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ МНОГОФАЗНОГО ВЕНТИЛЬНОГО ДВИГАТЕЛЯ | 2009 |
|
RU2401500C1 |
| Способ пространственно-векторной широтно-импульсной модуляции выходного напряжения многоуровневого трехфазного автономного инвертора напряжения | 2023 |
|
RU2818965C1 |
| Вентильный электропривод с цифровым управлением | 1988 |
|
SU1582291A1 |
| Способ прямого бездатчикового управления угловым положением ротора синхронного электродвигателя с постоянными магнитами | 2020 |
|
RU2749454C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2361356C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459345C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ СО СТАБИЛИЗАЦИЕЙ ТОКА ПРИ ПЕРЕХОДЕ В РЕЖИМ ПЕРЕГРУЗКИ | 2012 |
|
RU2522036C2 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |

Изобретение относится к управляемым электрическим двигателям, в частности к вентильным двигателям, и может быть использовано в регулируемых приводах переменного тока. Техническим результатом является повышение кпд вентильного двигателя за счет уменьшения динамических (коммутационных) потерь в автономном трехфазном инверторе из состава вентильного двигателя. Способ управления трехфазным вентильным двигателем включает преобразование напряжения задания в преобразователе координат в фазные управляющие напряжения задания в функции сигнала угла с датчика поворота ротора электродвигателя, преобразование фазных управляющих напряжений задания в трехфазном автономном инверторе напряжения с широтно-импульсным модулятором на входе в питающее трехфазное напряжение статора синхронного электродвигателя, фазные управляющие напряжения задания формируют в преобразователе координат в соответствии с выбранным алгоритмом. 3 ил.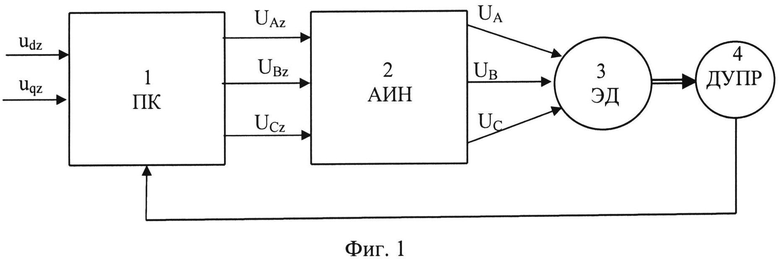
Способ управления трехфазным вентильным двигателем, заключающийся в преобразовании напряжений задания в преобразователе координат в фазные управляющие напряжения задания в функции сигнала угла с датчика поворота ротора электродвигателя, преобразовании фазных управляющих напряжений задания в трехфазном автономном инверторе напряжения с широтно-импульсным модулятором на входе в питающее трехфазное напряжение статора синхронного электродвигателя, отличающийся тем, что фазные управляющие напряжения задания формируют в преобразователе координат в соответствии с алгоритмом:
1)при 
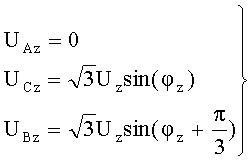 ,
,
2) при 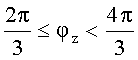
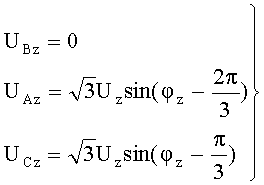 ,
,
3) при 
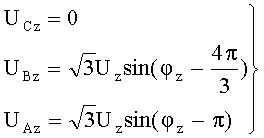 .
.
где UAz(t), UBz(t), UCz(t) - фазные управляющие напряжения задания;
 - модуль вектора задания управляющего напряжения во вращающейся системе координат;
- модуль вектора задания управляющего напряжения во вращающейся системе координат;
uq и ud - проекции вектора задания в ортогональной вращающейся системе координат;
φz=θ+φ0+δ - аргумент задания в трехфазной неподвижной системе координат;
θ - угол поворота ротора электродвигателя с учетом количества пар полюсов (электрический угол);
 - аргумент задания во вращающейся ортогональной системе координат;
- аргумент задания во вращающейся ортогональной системе координат;
δ - поправочный угол, учитывающий скорость вращения ротора электродвигателя.
| СОКОЛОВСКИЙ Г.Г | |||
| Электроприводы переменного тока с частотным управлением, Москва, Издательский центр "Академия", 2006, с.122 | |||
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2354036C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2000 |
|
RU2207700C2 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОПРИВОДОМ | 2008 |
|
RU2398348C1 |
| СОТОВЫЙ ЭЛЕМЕНТ, СПОСОБ И УСТРОЙСТВО ДЛЯ ЕГО ИЗГОТОВЛЕНИЯ, А ТАКЖЕ НОСИТЕЛЬ КАТАЛИТИЧЕСКОГО НЕЙТРАЛИЗАТОРА | 2002 |
|
RU2279557C2 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455748C1 |
| DE 3836950 C3, 04.09.1997 | |||
| US 4978895 A1, 18.12.1990 | |||
| WO 2009091319 A1, 23.07.2009 | |||

