Изобретение относится к машиностроению, а именно к цикловым манипуляторам для перемещения объектов из одной позиции в другую.
Наиболее близким по технической сущности и достигаемому результату к заявленному устройству является манипулятор, описанный в А.И.Корендясев, Б.Л.Саламандра, Л.И.Тывес «Теоретические основы Робототехники» (в 2-х книгах) М., Наука, 2006, книга 2, стр.5, содержащий основание, подвижное звено, имеющее возможность поворота относительно основания с расположенным на его конце захватом. Звено связано с основанием упругим элементом, образующим вместе с ним колебательную систему. Звено также связано через редуктор с приводом, выполненным, например, в виде двигателя постоянного тока, расположенного на основании и служащего для компенсации потерь энергии при движении звена из одной позиции в другую. Фиксация подвижного звена в крайних положениях осуществляется управляемыми фиксаторами, закрепленными на основании. Движение звена после отпускания фиксатора происходит под действием предварительно сжатого упругого элемента. После прохождения средней точки траектории упругий элемент растягивается, тормозя подвижное звено. По достижении второго крайнего положения звено фиксируется вторым фиксатором. К недостаткам этой конструкции можно отнести то, что упругий элемент обычно выполнен в виде спиральной или цилиндрической пружины, что требует увеличения габаритов, усложняет его крепление. Надежность работы манипулятора также ограничивается надежностью упругого элемента.
Задача изобретения - упрощение конструкции и повышение надежности работы манипулятора.
Указанная задача решается тем, что в предлагаемом манипуляторе упругая система выполнена в виде трех постоянных магнитов, один из которых встроен в подвижное звено, а два других закреплены на основании в крайних положениях подвижного звена, причем магниты расположены одноименными полюсами навстречу магниту на подвижном звене, что вызывает между ними силы отталкивания.
Проведенный заявителем поиск по научно-техническим и патентным источникам информации и выбранный из перечня аналогов прототип позволили выявить отличительные признаки в заявленном техническом решении, следовательно, заявленное устройство удовлетворяет критерию изобретения «новизна», а проведенный заявителем дополнительный поиск известных технических решений с целью обнаружения в них признаков, сходных с признаками отличительной части формулы заявленного технического решения, и сравнение свойств заявляемого и известных технических решений, обусловленных наличием в них указанных признаков, показал, что, во-первых, не все признаки отличительной части формулы найдены в известных технических решениях, во-вторых, сопоставительный анализ свойств, обусловленных наличием некоторых отличительных признаков в известных решениях и в заявленном техническом решении, показал, что у заявленного решения проявляются свойства, не совпадающие со свойствами, проявляемыми указанными признаками в известных технических решениях, чем обуславливается достижение заявленного положительного эффекта, следовательно, заявленное техническое решение удовлетворяет критерию изобретения «существенные отличия».
На чертеже изображена кинематическая схема предлагаемого манипулятора. Подвижное звено 1 имеет возможность, например, поворота относительно основания 2. На звене 1 закреплен постоянный магнит 3. Постоянные магниты 4 и 5 закреплены на основании в крайних точках движения звена 1. Полюса магнитов 4 и 5, направленные к подвижному звену, одноименны с направленным на них полюсом магнита 3. Фиксаторы 6 и 7, также закрепленные на основании в крайних точках траектории, удерживают подвижное звено 1 с закрепленной на нем ответной частью 8 при достижении звеном крайних положений. На основании 2 расположен привод 9, связанный с подвижным звеном редуктором 10. На подвижном конце звена 1 расположен захват 11. Вместо захвата на конце звена может располагаться узел крепления следующего звена манипулятора или другой рабочий орган.
Манипулятор работает следующим образом.
В исходном положении упругое звено 1 зафиксировано управляемым фиксатором 6 за ответную часть 8 относительно основания 2. Силы отталкивания постоянных магнитов 3 и 4 максимальны. При начале движения фиксатор 6 отпускает звено, и оно движется под действием сил отталкивания постоянных магнитов 3 и 4. После прохождения средней точки траектории движения (штрихпунктирная линия на схеме) и приближения звена ко второму крайнему положению взаимное отталкивание постоянных магнитов 3 и 5 тормозит движение звена 1. Поскольку магниты 4 и 5 и фиксаторы 6 и 7 расположены симметрично относительно среднего положения звена 1, то при отсутствии трения в системе звено 1 должно дойти до второго крайнего положения и зафиксироваться фиксатором 7. При наличии трения привод 9 через редуктор 10 компенсирует потери энергии, что позволяет звену 1 достичь фиксатора 7 (пунктир на схеме). При этом силы отталкивания постоянных магнитов 3 и 5 максимальны. Движение в обратную сторону после отпускания фиксатора 7 происходит аналогично.
Таким образом, предлагаемый манипулятор использует в качестве упругого элемента силы отталкивания постоянных магнитов, что ведет к упрощению и уменьшению габаритов конструкции за счет включения магнитов в основание и подвижное звено и повышению надежности вследствие исключения влияния усталости пружин.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 2008 |
|
RU2403145C2 |
| МАНИПУЛЯТОР | 2008 |
|
RU2403146C2 |
| МАНИПУЛЯТОР | 2009 |
|
RU2410235C2 |
| Манипулятор | 1991 |
|
SU1821353A1 |
| Устройство управления звеном манипулятора с рекуперацией энергии | 1989 |
|
SU1710334A1 |
| МАГАЗИННОЕ ОРУЖИЕ С РУЧНЫМ ПЕРЕЗАРЯЖАНИЕМ | 2009 |
|
RU2411440C1 |
| Захват манипулятора | 1991 |
|
SU1816686A1 |
| Пневматический индикатор | 1987 |
|
SU1509654A1 |
| Магнитная клавиатура | 2018 |
|
RU2704526C1 |
| МАГНИТНЫЙ ДЕМПФЕР | 2024 |
|
RU2826670C1 |
Изобретение относится к машиностроению, в частности к цикловым манипуляторам для перемещения объектов из одной позиции в другую. Манипулятор содержит подвижное звено с закрепленным на нем захватом, управляемые фиксаторы, закрепленные на основании в крайних точках движения звена, и расположенный на основании привод, связанный с подвижным звеном через редуктор. Манипулятор снабжен тремя постоянными магнитами, один из которых встроен в подвижное звено, а два других закреплены на основании в крайних положениях подвижного звена. Последние расположены одноименными полюсами навстречу магниту на подвижном звене для создания сил отталкивания постоянных магнитов. Обеспечивается упрощение конструкции и повышение надежности работы манипулятора. 1 ил.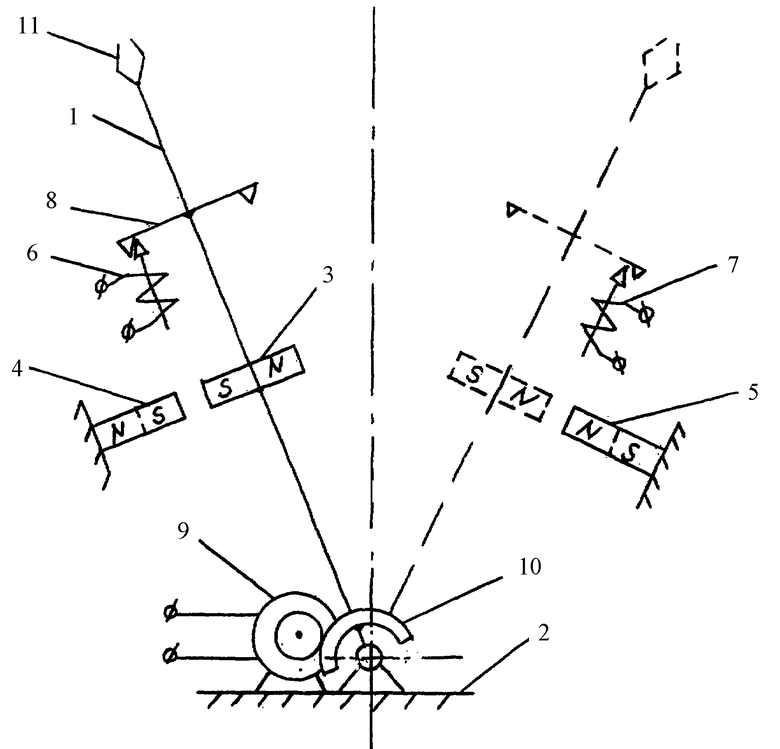
Цикловый манипулятор, содержащий подвижное звено с закрепленным на нем захватом, выполненное, например, с возможностью, например, поворота относительно основания, управляемые фиксаторы, закрепленные на основании в крайних точках движения звена, расположенный на основании привод, связанный с подвижным звеном через редуктор, отличающийся тем, что для уменьшения габаритов и повышения надежности он содержит постоянные магниты, один из которых закреплен на подвижном звене, а два других - на основании в крайних точках движения звена, причем полюс магнита на основании, направленный к звену одноименен с направленным на него полюсом магнита на подвижном звене.
| Механическая рука | 1975 |
|
SU568346A3 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 1994 |
|
RU2079401C1 |
| Манипулятор | 1991 |
|
SU1821353A1 |
| Устройство управления звеном манипулятора с рекуперацией энергии | 1989 |
|
SU1710334A1 |
| Способ перемещения резонансного манипулятора и устройство для его осуществления | 1988 |
|
SU1607229A1 |
| Манипулятор | 1986 |
|
SU1549741A1 |

