6 .- .л# 7
CD
i О 00 СЬ
Изобретение относится к машиностроению, а именно к захватам для промышленных роботов и манипуляторов для захвата и надежного закрепления деталей,
Цель изобретения - повышение надежности фиксации за счет увеличения усилия зажима.
На чертеже представлена схема заявленного устройства.
Заявленное устройство состоит из следующих основных элементов: 1 - основание, 2 - привод, 3 - винт самотормозящейся винтовой передачи, 4 - гайка винтовой передачи, 5 - подвижное звено, 6 и 7 - губки, 8 - коромысло, 9 - упругая часть коромысла, 10 и 11 - сердечники с обмоткой, 12 - якорь электромагнита, 13-упор, 14-зажимаемая деталь.
Захват манипулятора содержит основание 1, на котором размещен привод 2, выполненный, например, в виде двигателя постоянного тока. Вал привода связан посредством самотормозящейся, например, винтовой, передачей, включающей винт 3 и гайку 4, с подвижным звеном 5, на конце которого расположена зажимная губка 6, С помощью винтовой передачи обеспечивается возможность возвратно-поступательного перемещения звена 5 и губки 6 относительно основания захвата, Вторая зажимная губка 7 расположена на конце коромысла 8, выполненного с возможностью ограниченного углового перемещения относительно основания 1. Одна часть коромысла 8 выполнена в. виде упругого элемента, например, листовой пружины. На конце упругой части 9 коромысла 8 закреплен якорь 12, который может взаимодействовать с расположенными на основании 1 сердечниками с обмотками 10 и 11 электромагнитов в крайних положениях якоря 12 при изгибе упругой части 9 коромысла 8. Упор 13, расположенный на основании, ограничивает угол поворота коромысла 8 в сторону основания 1. Зажимаемая деталь 14 располагается между зажимными губками 6 и 7.
Захват работает следующим образом. В исходном разжатом состоянии подвижное звено 5 отведено приводом 2 с помощью винтовой передачи 3 и 4 в сторону привода таким образом, что расстояние между зажимными губками 5 и 6 обеспечивает свободный проход зажимаемой детали 14. Упругий конец 9 коромысла 8 изогнут таким образом, что расположенный на его конце якорь 1 2 притягивается расположенным на основании 1 сердечником с обмоткой 10. При свободном состоянии упругого элемента 9 якорь 12 расположен посередине между сердечниками 10 и 11 электромагнита. Тогда в исходном состоянии конец коромысла 8, на котором расположена губка 7 прижат к упору 13. При зажиме захват подводится к зажимаемой детали 14 до касания ее зажимной губкой 7. После касания включается привод 2, вращая винт3 самотормозящейся винтовой передачи. Вращение винта 3 приводит к перемещению гайки 4, подвижного звена 5 и расположенной на его конце зажимной губки 6 в сторону зажимаемой детали 14. Перемещение производится до прижатия губки 6 к детали 14, которое можно определить по возрастанию тока двигателя 2 или с помощью специальных
5 датчиков. После остановки привода 2 отключается напряжение от обмотки электромагнита, расположенной на сердечнике 10, которая удерживала якорь 12 в левом по чертежу положении, и подается напряже0 ние на обмотку сердечника 11, ранее обесточенную. При отключении обмотки сердечника 10 якорь 12 отрывается от него усилием изогнутой упругой части 9 коромысла 8. Перемещение зажимной губки 7 и со5 ответствующего ей конца коромысла 8 ограничено с одной стороны упором 13, с другой стороны - деталью 14, губкой б, звеном 5 и самотормозящейся передачей. Таким образом, можно считать, что коромысло
0 g неподвижно и не влияет на движение закрепленного на конце его упругой части 9 якоря 12, Движение якоря 12 определяется его массой и упругостью части 9 коромысла. Поскольку Потери энергии в этой колеба5 тельной системе вызваны только внутренним трением в упругом элементе и достаточно малы, то при своем движении якорь 12 подойдет близко к сердечнику Т1, через обмотку которого течет ток, поскольку
0
этот сердечник расположен на одинаковом
расстоянии с сердечником 10 от места расположения якоря 12 при свободном состоянии упругой части 9 коромысла 8. При этом сердечник 11 с обмоткой притянет якорь 12.
5 зафиксировав тем самым его в правом по фиг.1 положении. Усилие изгиба упругой части 9 передается через коромысло 8, выполненное с возможностью поворота относительно основания 1, на расположенную
0 на его конце зажимную губку 7, увеличивая тем самым усилие зажима детали 14,
Разжим производится в обратном порядке. Отключается напряжение от обмотки на сердечнике 11 и подается на обмотку на
5 сердечнике 10. При этом якорь 12 перемещается из правого в левое положение, конец коромысла 8, на котором расположена губка 7, прижимается к упору 13, снимая тем самым дополнительное усилие зажима с детали 14. После фиксации якоря 12 насердечнике 10 привод 2 отводит подвижное звено 5 с расположенной на нем губкой 6 от зажимаемой детали 14 с помощью винтовой передачи 3, 4. Деталь 14 освобождается и захват отводится от нее. В конце разжима захват опять находится в исходном состоянии.
Таким образом предлагаемый захват позволяет повысить надежность фиксации зажимаемой детали за счет увеличения усилия зажима, связанного с использованием дополнительного усилия изогнутого упругого элемента.
Формул а изобретени я Захват манипулятора, содержащий основание, привод, две губки, одна из которых
0
5
смонтирована на основании, а другая посредством винтовой самотормозящейся передачи связана с приводом, отличающийся тем, что, с целью повышения надежности фиксации за счет увеличения усилия зажима, захват снабжен шарнирно смонтированным на основании с возможностью ограниченного углового перемещения коромыслом и смонтированным на основании электромагнитом, содержащим пару сердечников с обмоткой, при этом коромысло выполнено из двух частей, на одной из которых смонтирована губка, а на другой, выполненной упругой, смонтирован якорь с возможностью попеременного взаимодействия с одним из сердечников.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитное зажимное приспособление | 1982 |
|
SU1257960A1 |
| ЗАХВАТ МАНИПУЛЯТОРА | 1992 |
|
RU2043919C1 |
| Захватное устройство манипулятора | 1988 |
|
SU1572807A1 |
| СХВАТ МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2259915C1 |
| МАНИПУЛЯТОР | 2008 |
|
RU2403146C2 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО ЛУЖЕНИЯ ЗАГОТОВОК СТЕКЛОКЕРАМИЧЕСКИХ КОНДЕНСАТОРОВ РАДИОДЕТАЛЕЙ | 1989 |
|
SU1820573A1 |
| Устройство для установки вала в отверстие | 1988 |
|
SU1657328A1 |
| ЗАХВАТ | 2000 |
|
RU2175910C1 |
| Устройство для стыковки сменного инструмента манипулятора | 1984 |
|
SU1288047A1 |
| Захват манипулятора | 1989 |
|
SU1821357A1 |
Использование: в машиностроении в захватах для промышленных роботов и манипуляторов. Сущность изобретения: захват позволяет повысить надёжность фиксации зажимаемой детали за счет установки на основании 1 с возможностью ограниченного углового перемещения коромысла 8, которое выполнено из двух частей и электромагнита, содержащего пару сердечников 10 и 11 с обмотками. Одна часть 9 коромысла выполнена упругой, и на ней смонтирован якорь 12. При подаче напряжения на обмотку сердечника 10 якорь 12 притягивается к нему, а усилие изгиба упругой части 9 коромысла 8 передается на зажимную губку 7. 1 мл.,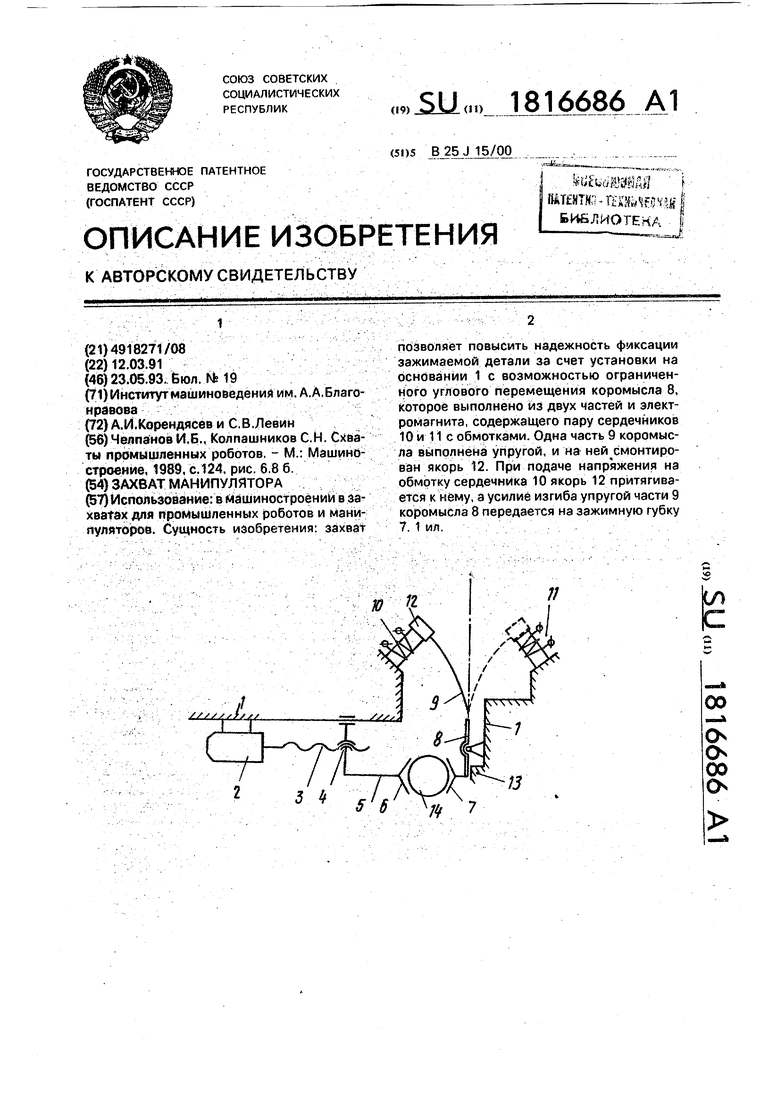
| Челпанов Й.Б., Колпашников С.Н | |||
| Схваты промышленных роботов | |||
| - М.: Машиностроение, 1989, с | |||
| Аппарат для радиометрической съемки | 1922 |
|
SU124A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
