Изобретение относится к машиностроению, а именно к цикловым манипуляторам для перемещения объектов из одной фиксированной позиции в другую.
Наиболее близким по технической сущности и достигаемому результату к заявленному устройству является манипулятор по а.с. 1821353, содержащий основание, подвижное звено, выполненное в виде плоского упругого элемента, один конец которого жестко закреплен на основании, а на другом конце находится захват и закрепленные на основании в крайних точках движения звена, фиксирующие электромагниты, состоящие из обмотки с сердечником и якоря, при этом якорь закреплен на подвижном конце звена. К его недостаткам можно отнести необходимость точной настройки механической части манипулятора, что связано с небольшой зоной действия фиксирующего электромагнита и быстрым ослаблением силы притяжения при отдалении якоря от сердечника. Нарушение симметрии установки фиксирующих электромагнитов может привести к тому, что упругое звено не дойдет до крайнего положения, что приведет к сбоям в работе манипулятора.
Задача изобретения - повышение надежности работы манипулятора.
Указанная задача достигается тем, что в предлагаемом манипуляторе противоположный от захвата конец упругого звена выполнен с возможностью перемещения, например поворота вокруг оси, перпендикулярной основанию. На звене рядом с осью закреплен якорь электромагнитов, сердечники с обмотками которых закреплены на основании симметрично относительно среднего положения звена.
Проведенный заявителем поиск по научно-техническим и патентным источникам информации и выбранный из перечня аналогов прототип позволили выявить отличительные признаки в заявленном техническом решении, следовательно, заявленное устройство удовлетворяет критерию изобретения «новизна», а проведенный заявителем дополнительный поиск известных технических решений с целью обнаружения в них признаков, сходных с признаками отличительной части формулы заявленного технического решения, и сравнение свойств заявляемого и известных технических решений, обусловленных наличием в них указанных признаков показал, что, во-первых, не все признаки отличительной части формулы найдены в известных технических решениях, во-вторых, сопоставительный анализ свойств, обусловленных наличием некоторых отличительных признаков в известных решениях и в заявленном техническом решении, показал, что у заявленного решения проявляются свойства, не совпадающие со свойствами, проявляемыми указанными признаками в известных технических решениях, чем обуславливается достижение заявленного положительного эффекта, следовательно, заявленное техническое решение удовлетворяет критерию изобретения «существенные отличия».
На чертеже изображена кинематическая схема предлагаемого манипулятора. Подвижное звено 1 выполнено, например, в виде упругого элемента с закрепленными на его свободном конце захватом 2 и якорем 3 фиксирующих электромагнитов, сердечник с обмоткой которых 4 и 5 закреплены на основании 6 в крайних точках движения звена. Вместо захвата на конце звена может располагаться узел крепления следующего звена манипулятора или другой рабочий орган. Противоположный от захвата конец звена 1 имеет возможность ограниченного поворота относительно расположенной на основании 2 оси 7. На звене 1 рядом с осью 7 закреплен якорь 8 электромагнитов предварительного изгиба, сердечники с обмотками которых 9 и 10 закреплены на основании симметрично относительно среднего положения звена.
Манипулятор работает следующим образом.
В исходном положении упругое звено 1 изогнуто так, что якорь 3 притянут к сердечнику, например, 4, и удерживается на нем за счет магнитного поля тока, протекающего через обмотку. Противоположный от захвата конец звена располагается таким образом, что якорь 8 касается сердечника электромагнита 10. Обмотки электромагнитов 9 и 10 обесточены. При необходимости перемещения звена в другое положение сначала подается напряжение на обмотку электромагнита 9, который притягивает к себе якорь 8 и вызывает дополнительный изгиб закрепленного одним концом на фиксирующем электромагните 4 упругого звена 1 (пунктирная линия А на чертеже). Затем снимается напряжение с обмотки электромагнита 4 и подается на обмотку электромагнита 5. Звено отпускается электромагнитом 4 и перемещается под действием сил упругости к электромагниту 5, где фиксируется магнитным полем обмотки (штрихпунктирная линия на чертеже). Компенсация потерь энергии при движении звена 1 происходит за счет предварительного дополнительного изгиба на начальном этапе движения и за счет притяжения электромагнита 5 на конечном участке траектории движения звена. После фиксации звена 1 на электромагните 5 напряжение от обмотки электромагнита 9 отключается, а якорь 8 прижимается к сердечнику электромагнита 9 за счет изгиба звена 1. Движение в обратную сторону происходит аналогично: включенный электромагнит 10 притягивает якорь 8 и дополнительно изгибает звено 1. Отключение обмотки электромагнита 5 и подключение обмотки электромагнита 4 приводит к отпусканию звена 1 от электромагнита 5, движению его под действием сил упругости и фиксацию на электромагните 4. Величина перемещения якоря 8 электромагнитов дополнительного изгиба 9 и 10 определяется из условия устойчивой работы манипулятора.
Таким образом, в предлагаемом манипуляторе с упругим звеном компенсация потерь энергии при движении звена происходит как за счет притяжения фиксирующих электромагнитов, так и за счет увеличения начального изгиба звена электромагнитами дополнительного изгиба. Это позволяет компенсировать потери энергии при движении звена, и снизить требования с симметрии установки фиксирующих электромагнитов, что повышает надежность работы манипулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 2008 |
|
RU2403145C2 |
| МАНИПУЛЯТОР | 2008 |
|
RU2403146C2 |
| Манипулятор | 1991 |
|
SU1821353A1 |
| Захват манипулятора | 1991 |
|
SU1816686A1 |
| ЦИКЛОВЫЙ МАНИПУЛЯТОР | 2008 |
|
RU2403142C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ И КИНЕМАТИЧЕСКОЙ РАЗВЯЗКОЙ | 2010 |
|
RU2455146C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ И КИНЕМАТИЧЕСКОЙ РАЗВЯЗКОЙ | 2010 |
|
RU2455147C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2009 |
|
RU2412798C2 |
| РОБОТОТЕХНИЧЕСКАЯ УСТАНОВКА ДЛЯ ОБРАБОТКИ ДЕТАЛЕЙ | 2009 |
|
RU2415744C2 |
| Резонансный манипулятор | 2024 |
|
RU2840440C1 |
Изобретение относится к машиностроению, а именно к цикловым манипуляторам для перемещения объектов из одной позиции в другую. Манипулятор содержит основание, подвижное звено, захват и фиксирующие элементы, выполненные в виде электромагнитов. Сердечники электромагнитов закреплены на основании в крайних точках движения звена, а якорь закреплен на подвижном конце звена рядом с захватом. Противоположный от захвата конец звена выполнен с возможностью поворота вокруг оси, перпендикулярной основанию, а рядом с осью закреплен якорь электромагнитов предварительного изгиба подвижного звена. Сердечники с обмотками электромагнитов предварительного изгиба закреплены на основании симметрично относительно среднего положения звена. Компенсация потерь энергии при движении звена происходит как за счет притяжения фиксирующих электромагнитов, так и за счет увеличения начального изгиба звена электромагнитами дополнительного изгиба, что позволяет компенсировать потери энергии при движении звена и снизить требования с симметрии установки фиксирующих электромагнитов, что повышает надежность работы манипулятора. 1 ил.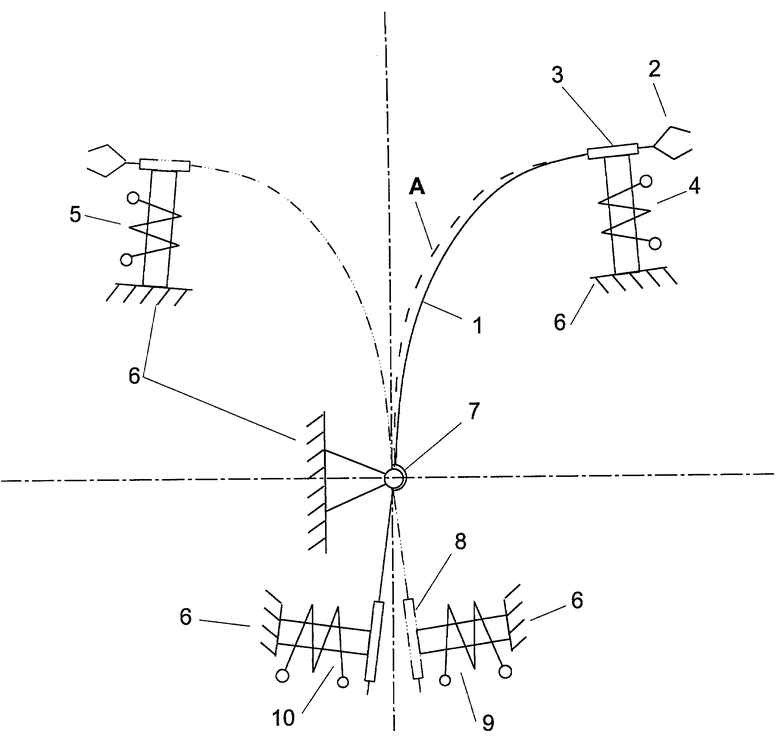
Манипулятор, содержащий основание, подвижное звено, выполненное, например, в виде плоского упругого элемента, захват, закрепленный на подвижном конце звена, и фиксирующие элементы, выполненные в виде электромагнитов, состоящих из сердечников с обмоткой, закрепленных на основании в крайних точках движения звена, и якоря, закрепленного на подвижном конце звена рядом с захватом, отличающийся тем, что противоположный от захвата конец звена выполнен с возможностью поворота вокруг оси, перпендикулярной основанию, и на нем рядом с осью закреплен якорь электромагнитов предварительного изгиба подвижного звена, сердечники с обмотками которых закреплены на основании симметрично относительно среднего положения звена.
| Манипулятор | 1991 |
|
SU1821353A1 |
| Механическая рука | 1975 |
|
SU568346A3 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 1994 |
|
RU2079401C1 |
| Устройство управления звеном манипулятора с рекуперацией энергии | 1989 |
|
SU1710334A1 |
| Способ перемещения резонансного манипулятора и устройство для его осуществления | 1988 |
|
SU1607229A1 |
| Манипулятор | 1986 |
|
SU1549741A1 |

