Изобретение относится к машиностроению, а именно к цикловым манипуляторам для перемещения объектов из одной позиции в другую.
Наиболее близким по технической сущности и достигаемому результату к заявленному устройству является манипулятор по а.с. 1821353, содержащий основание, подвижное звено, выполненное в виде плоского упругого элемента, один конец которого жестко закреплен на основании, а на другом конце находится захват и закрепленные на основании в крайних точках движения звена фиксирующие электромагниты, состоящие из обмотки с сердечником и якоря, при этом якорь закреплен на подвижном конце звена. К его недостаткам можно отнести необходимость протекания тока через обмотки электромагнита во время нахождения звена в соответствующем этому электромагниту крайнем положении, что приводит к расходу энергии и нагреву обмотки. Кроме того, звено зафиксировано электромагнитом в изогнутом состоянии и при пропадании питания электромагнита звено приходит в движение, что потребует дополнительных усилий для возвращения его в исходное положение и приводит к снижению надежности работы манипулятора.
Цель изобретения - снижение энергопотребления и повышение надежности работы манипулятора.
Указанная цель достигается тем, что в предлагаемом манипуляторе в сердечник включен постоянный магнит, притяжение которого дотягивает подвижное звено с закрепленным на его конце якорем до соответствующего крайнего положения и фиксирует его. При необходимости перемещения звена в другое положение на обмотку электромагнита подается напряжение таким образом, что поле обмотки ослабляет поле постоянного магнита и изогнутое звено под действием сил упругости отрывается от сердечника, перемещаясь в другое крайнее положение.
Проведенный заявителем поиск по научно-техническим и патентным источникам информации и выбранный из перечня аналогов прототип позволили выявить отличительные признаки в заявленном техническом решении, следовательно, заявленное устройство удовлетворяет критерию изобретения «новизна», а проведенный заявителем дополнительный поиск известных технических решений с целью обнаружения в них признаков, сходных с признаками отличительной части формулы заявленного технического решения, и сравнение свойств заявляемого и известных технических решений, обусловленных наличием в них указанных признаков, показал, что, во-первых, не все признаки отличительной части формулы найдены в известных технических решениях, во-вторых, сопоставительный анализ свойств, обусловленных наличием некоторых отличительных признаков в известных решениях и в заявленном техническом решении, показал, что у заявленного решения проявляются свойства, не совпадающие со свойствами, проявляемыми указанными признаками в известных технических решениях, чем обуславливается достижение заявленного положительного эффекта, следовательно, заявленное техническое решение удовлетворяет критерию изобретения «существенные отличия».
На чертеже изображена кинематическая схема предлагаемого манипулятора.
Подвижное звено 1, выполненное, например, в виде упругого элемента, одним своим концом жестко закреплено на основании 2. На другом конце звена закреплен якорь 3 электромагнитов, сердечники 4 и 5 с обмотками которых закреплены на основании 2 в крайних точках движения звена. На этом же конце звена закреплен захват 6. Вместо захвата на конце звена может располагаться узел крепления следующего звена манипулятора или другой рабочий орган. В сердечник 4 и 5 электромагнита включены постоянные магниты 7 и 8 соответственно.
Манипулятор работает следующим образом.
В исходном положении упругое звено 1 изогнуто так, что якорь 3 притянут к сердечнику, например сердечнику 4, с включенным в него постоянным магнитом 7. Якорь удерживается за счет притяжения постоянного магнита. При необходимости перемещения звена в другое положение на обмотку сердечника 4 подается импульс напряжения такой величины и полярности, чтобы ослабить поле постоянного магнита 7. При этом усилия постоянного магнита не хватает для преодоления усилия изогнутого упругого звена 1 и якорь 3 отрывается от сердечника 4. Происходит колебательное движение звена из одного крайнего положения в другое. При отсутствии потерь в колебательной системе звена якорь достиг бы второго сердечника 5, расположенного на основании 2 симметрично сердечнику 4 относительно нейтрального положения звена (штрихпунктирная линия). Потери в манипуляторы малы из-за отсутствия трущихся частей и связаны, в основном, с внутренним трением в упругом элементе. Поэтому якорь 3 в своем движении подходит достаточно близко к сердечнику 5 и попадает в зону притяжения встроенного в сердечник 5 постоянного магнита 8, который дотягивает якорь 3 до сердечника 5 и фиксирует его. Движение в обратную сторону вызывается подачей соответствующего импульса напряжения на обмотку сердечника 5, ослабляющего поле постоянного магнита 8.
Таким образом, предлагаемый манипулятор потребляет энергию только в виде короткого импульса в момент отпускания звена фиксирующим электромагнитом. Дотягивание якоря до сердечника и фиксация его осуществляется полем постоянного магнита. Это снижает энергопотребление и повышает надежность работы манипулятора при отключении питания в момент нахождения звена в крайнем положении.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 2008 |
|
RU2403145C2 |
| МАНИПУЛЯТОР | 2009 |
|
RU2410235C2 |
| Манипулятор | 1991 |
|
SU1821353A1 |
| Захват манипулятора | 1991 |
|
SU1816686A1 |
| ЦИКЛОВЫЙ МАНИПУЛЯТОР | 2008 |
|
RU2403142C2 |
| Электромагнитный двигатель | 1946 |
|
SU69780A1 |
| Устройство управления звеном манипулятора с рекуперацией энергии | 1989 |
|
SU1710334A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 2005 |
|
RU2312420C2 |
| Поляризованный электромагнит | 1981 |
|
SU1065895A1 |
| УСТРОЙСТВО ДЛЯ СБОРКИ РАДИАЛЬНЫХ РОЛИКОВЫХ ПОДШИПНИКОВ | 2011 |
|
RU2466308C1 |
Изобретение относится к машиностроению, а именно к цикловым манипуляторам для перемещения объектов из одной позиции в другую. Манипулятор содержит основание, подвижное звено, выполненное, например, в виде плоского упругого элемента, один конец которого жестко закреплен на основании, захват, закрепленный на подвижном конце звена, фиксирующие элементы, выполненные в виде электромагнитов, состоящих из сердечников с обмоткой, закрепленных на основании в крайних точках движения звена, и якоря, закрепленного на подвижном конце звена. Сердечник снабжен постоянным магнитом, обеспечивающим дотягивание якоря до сердечника и его фиксирование, и таким образом, манипулятор потребляет энергию только в виде короткого импульса в момент отпускания звена фиксирующим электромагнитом. Изобретение позволит снизить энергопотребление и повысить надежность работы манипулятора. 1 ил.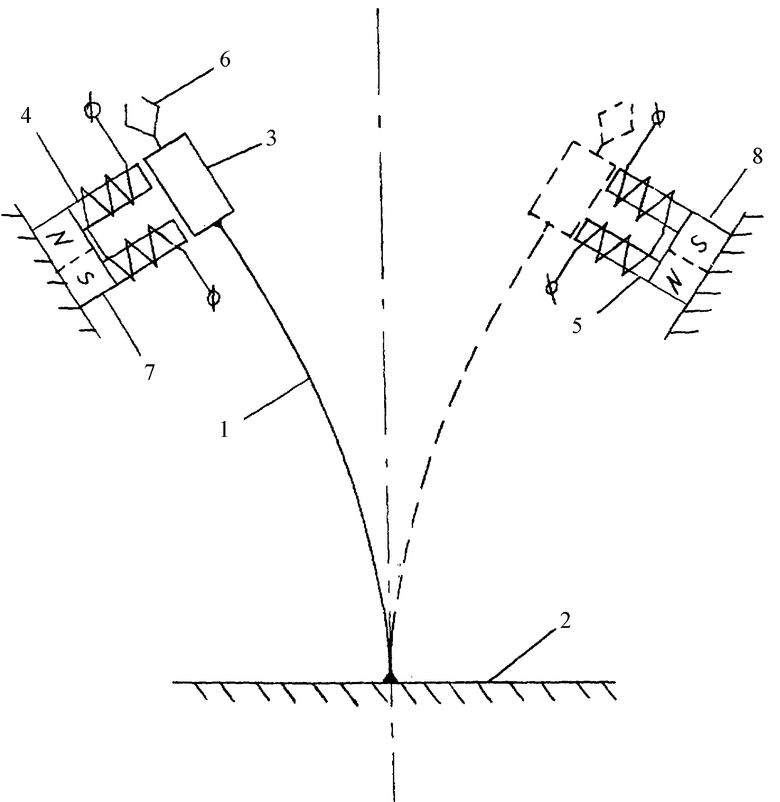
Манипулятор, содержащий основание, подвижное звено, выполненное, например, в виде плоского упругого элемента, один конец которого жестко закреплен на основании, захват, закрепленный на подвижном конце звена, фиксирующие элементы, выполненные в виде электромагнитов, состоящих из сердечников с обмоткой, закрепленных на основании в крайних точках движения звена, и якоря, закрепленного на подвижном конце звена, отличающийся тем, что сердечник снабжен постоянным магнитом, обеспечивающим дотягивание якоря до сердечника и его фиксирование.
| Манипулятор | 1991 |
|
SU1821353A1 |
| СПОСОБ ПОДПИТКИ ЭНЕРГИЕЙ ПРИВОДА КОЛЕБАТЕЛЬНОГО ТИПА | 2002 |
|
RU2239549C2 |
| МЕХАНИЧЕСКАЯ РУКА | 1993 |
|
RU2065354C1 |
| Механическая рука | 1975 |
|
SU568346A3 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 1994 |
|
RU2079401C1 |
| US 4667998 A, 26.05.1987 | |||
| DE 102005005805 B3, 24.08.2006. | |||

