О5 О N5 ГС
Изобретение относится к области робототехники и может быть использовано для автоматизации основных и вспомогательных операций в машинострои- 5 тельном производстве„
Цель изобретения - повышение производительности за счет более высокого быстродействия и уменьшения времени успокоения манипулятора при его фик- 10 сации в крайних положениях.
На фиг. 1 изображен вариант устройства для реализации способа с линейным перемещением; на фиг. 2 - вариант устПотенциальная энергия упругих элементов и импульс реактивной силы преобразуются в кинетическую энергию подвижной части манипулятора.
После прохода среднего положения кинетическая энергия подвижной части |манипулятора преобразуется в потенциальную энергию упругих элементов, вследствие чего звено 1, механическая рука 2 и исполнительный орган 3 затор маживаются, а упругий элемент 8 сжима ется. Вблизи крайнего положения распределитель может кратковременным им
ройства для реализации способа с фик- 15 пульсом подать рабочую среду в сопло
10 где она ускоряется и истекает и сопла 10 в атмосферу. Под действием реактивной силы исполнительный орган 3 тормозится синхронно с подвижным
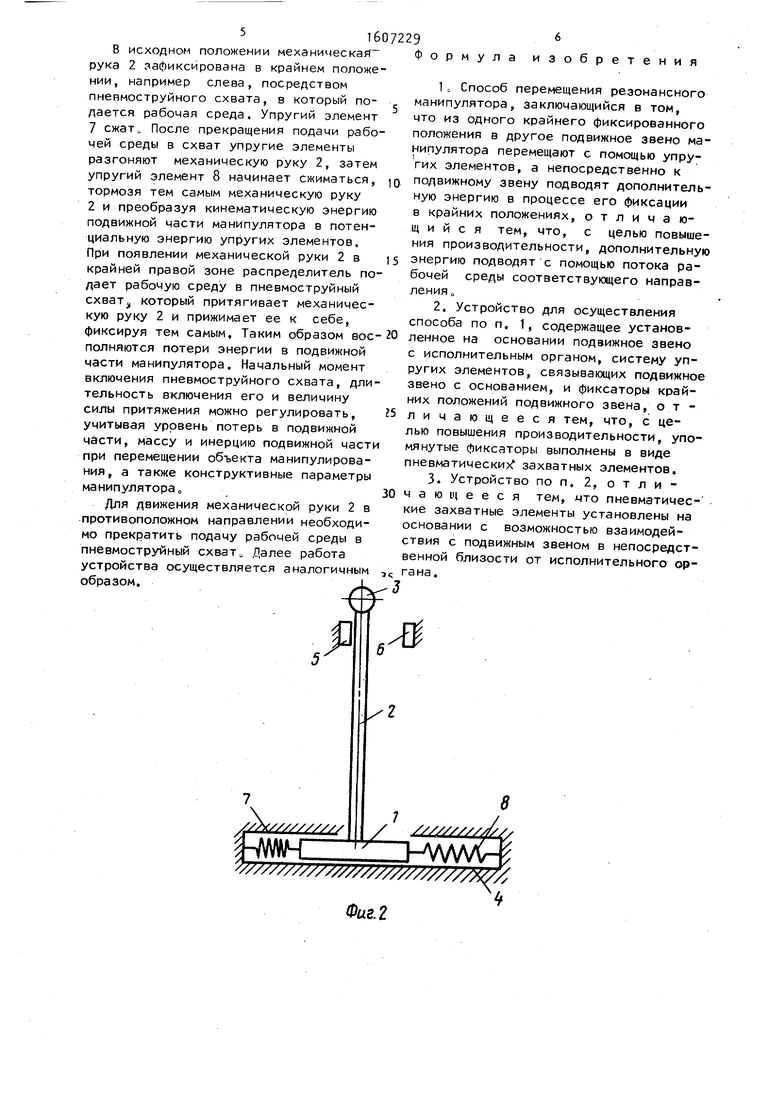
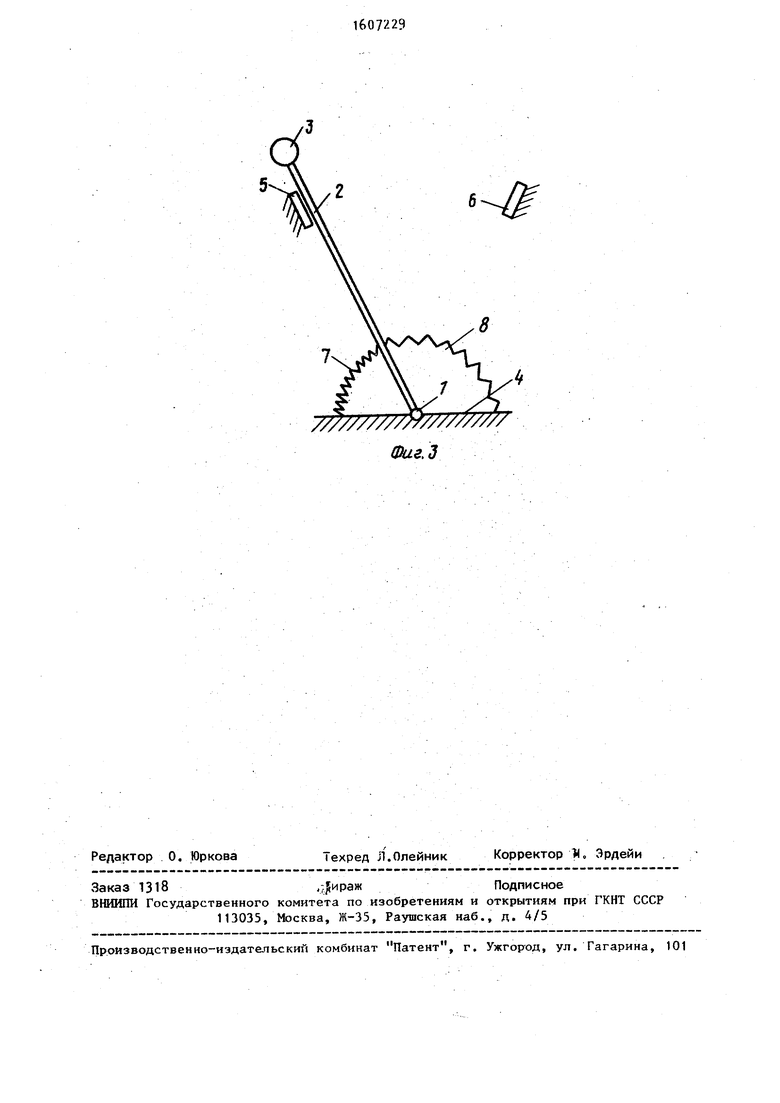
сацией механической руки в крайних положениях; на фиг, 3 - вариант устройства для реализации способа с вращательным перемещениемо
10 где она ускоряется и истекает из сопла 10 в атмосферу. Под действием реактивной силы исполнительный орган 3 тормозится синхронно с подвижным
Устройство, реализующее данный спо-20 звеном 1, что исключает колебание его
соб, содержит подвижное звено 1 с мег ханической рукой 2 и с исполнительным органом 3. Звено 1 перемещается относительно основ-ания и фиксируется в крайних положениях фиксаторами 5 и 6, установленными На основании п С основанием 4 звено 1 связано системой упругих элементов 7 и 8. На механической руке 2 могут быть закреплены размещенные в горизонтальной плоское ти и направленные в противоположные стороны сопла 9 и 10, которые соединены с источником рабочей среды через cootвeтcтвyющий распределитель (не показан) Расположение сопел 9 и 10 вблизи исполнительного органа 3 обеспечивает достижение наилучших результатов
Устройство для осуществления предлагаемого способа работает следующим ббразоМс
25
30
при торможении звена 1 и механической руки 2, Пружина 8 сжимается звеном 1 до предела и фиксатор 6 фиксирует подвижное звено 1 в крайнем правом положении. Импульсы реактивных сил уско- , рения и торможения исключают существенные колебания исполнительного органа в крайних положениях, а разница импульса сил ускорения и торможения определяет величину энергии, передаваемой в колебательную систему для восполнения потерь. Далее, после того как фиксатор 6 освобождает звено 1, исполнительный орган 3 совместно с механи- 35 ческой рукой 2 и звеном 1 аналогично перемещается влево. Длительность и величина импульса реактивной силы оп- .ределяется наличием или отсутствием объекта манипулирования в исполнитель- ном органе 3. а также конструктивными параметрами манипулятора.
В другом варианте устройства, реализующего данный способ, механическая рука 2 фиксируется в крайних положениях фиксаторами, выполненными в виде пневмоструйных схватов, неподвижно закрепленных на основании о
40
В исходном положении подвижное звено 1 зафиксировано в одном из крайних положений, например, фиксатором 5. Подвижное звено 1 начинает движение после того, как фиксатор 5 освобождает его. Под действием упругих элементов 7 и 8 звено 1 с механической рукой 2 перемещается вправо Одновременно распределитель кратковременным импульсом подает рабочую среду в сопло 9; где она ускоряется и истекает из сопла 9 в атмосферу. Под действием реактивной силы исполнительный орган 3 ускоряется синхронно с подвижным звеном 1, что исключает колебания его при разгоне звена 1 и механической руки 2
9 .
Потенциальная энергия упругих элементов и импульс реактивной силы преобразуются в кинетическую энергию подвижной части манипулятора.
После прохода среднего положения кинетическая энергия подвижной части |манипулятора преобразуется в потенциальную энергию упругих элементов, вследствие чего звено 1, механическая рука 2 и исполнительный орган 3 затормаживаются, а упругий элемент 8 сжимается. Вблизи крайнего положения распределитель может кратковременным импульсом подать рабочую среду в сопло
10 где она ускоряется и истекает из сопла 10 в атмосферу. Под действием реактивной силы исполнительный орган 3 тормозится синхронно с подвижным
20 звеном 1, что исключает колебание его
25
30
Д5
при торможении звена 1 и механической руки 2, Пружина 8 сжимается звеном 1 до предела и фиксатор 6 фиксирует подвижное звено 1 в крайнем правом положении. Импульсы реактивных сил уско- , рения и торможения исключают существенные колебания исполнительного органа в крайних положениях, а разница импульса сил ускорения и торможения определяет величину энергии, передаваемой в колебательную систему для восполнения потерь. Далее, после того как фиксатор 6 освобождает звено 1, исполнительный орган 3 совместно с механи- 35 ческой рукой 2 и звеном 1 аналогично перемещается влево. Длительность и величина импульса реактивной силы оп- .ределяется наличием или отсутствием объекта манипулирования в исполнитель- ном органе 3. а также конструктивными параметрами манипулятора.
В другом варианте устройства, реализующего данный способ, механическая рука 2 фиксируется в крайних положениях фиксаторами, выполненными в виде пневмоструйных схватов, неподвижно закрепленных на основании о
40
Пневмоструйные схваты соединены с источником рабочей среды через распределитель (не показан) и расположены таким образом, что фиксацию механической руки 2 осуществляют как можно ближе к исполнительному органу 3, Это обеспечивает высокую точность по- зиционирования и исключает колебание исполнительного органа 3 в крайних положениях.
1
В исходном положении механическай рука 2 зафиксирована в крайнем положнии, например слева, посредством пненмоструйного схвата, в который по дается рабочая среда. Упругий элемен 7 сжат. После прекращения подачи рабчей среды в схват упругие элементы разгоняют механическую руку 2, затем упругий элемент 8 начинает сжиматься тормозя тем самым механическую руку 2 и преобразуя кинематическую энергию подвижной части манипулятора а потенциальную энергию упругих элементов. При появлении механической руки 2 в крайней правой зоне распределитель подает рабочую среду в пневмоструйный cxBaTj, который притягивает механическую руку 2 и прижимает ее к себе,
- - .,
фиксируя тем самым. Таким образом вое
полняются потери энергии в подвижной части манипулятора. Начальный момент включения пневмоструйного схвата, длительность включения его и величину силы притяжения можно регулировать учитывая уровень потерь в подвижной части, массу и инерцию подвижной част при перемещении объекта манипулирования, а также конструктивные параметры манипулятора о
Для движения механической руки 2 в противоположном направлении необходимо прекратить подачу рабочей среды в пневмоструйный схват„ Далее работа устройства осуществляется аналогичным образом.
У
,о 15Ф
ормула изобретения
,о 15
l-IIUUOUa П
20 ленное на
1 о Способ перемещения резонансного манипулятора, заключающийся в том, что из одного крайнего фиксированного положения в другое подвижное звено манипулятора перемещают с помощью упругих элементов, а непосредственно к подвижному звену подводят дополнительную энергию в процессе его фиксации в крайних положениях, отличающийся тем, что, с целью повышения производительности, дополнительную энергию подводят с помощью потока рабочей среды соответствующего направления „
2. Устройство для осуществления способа по п. 1, содержащее установосновании подвижное звено
25
с исполнительным органом, систему упругих элементов, связывающих подвижное звено с основанием, и фиксаторы крайних положений подвижного звена, отличающееся тем, что, с целью повышения производительности, упомянутые фиксаторы выполнены в виде пневматически захватных элементов. 3. Устройство по п. 2, отличающееся тем, что пневматичес- кие захватные элементы установлены на основании с возможностью взаимодействия с подвижным звеном в непосредственной близости от исполнительного ор- .; гана.
0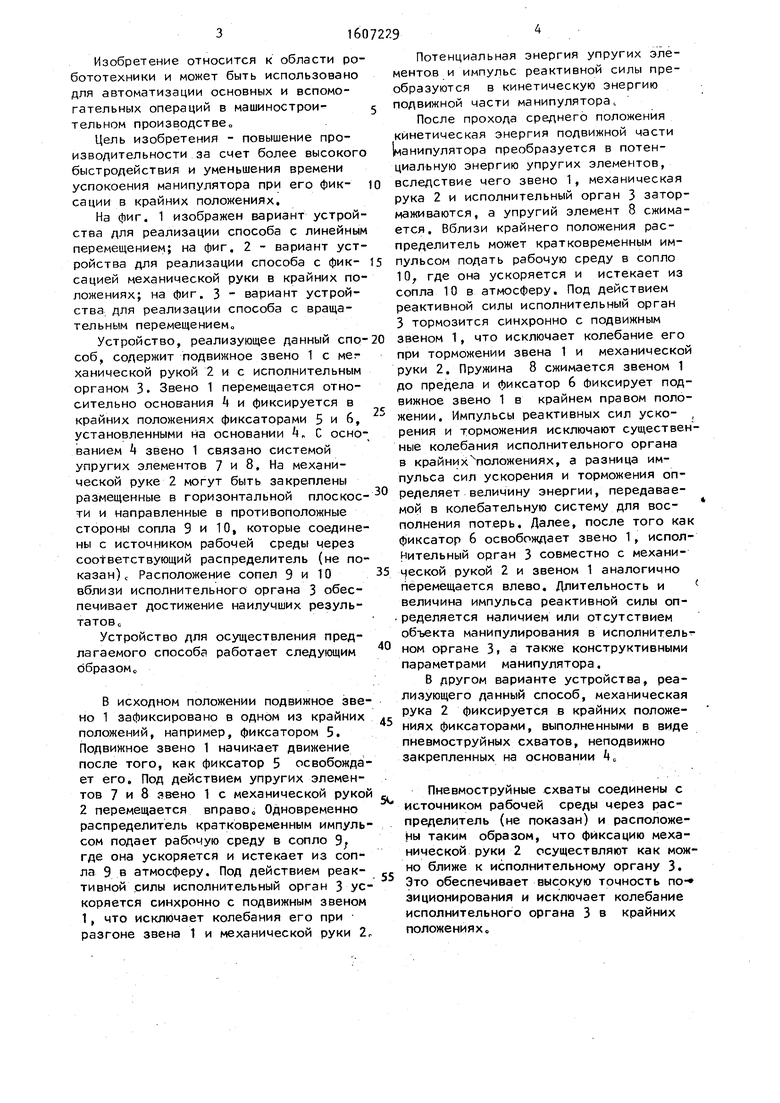
| название | год | авторы | номер документа |
|---|---|---|---|
| Резонансный манипулятор | 2024 |
|
RU2840440C1 |
| Манипулятор | 1989 |
|
SU1613318A1 |
| Резонансная механическая рука | 1982 |
|
SU1171306A1 |
| Манипулятор | 1989 |
|
SU1646844A1 |
| Пневматический манипулятор | 1988 |
|
SU1575492A1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 1994 |
|
RU2079401C1 |
| Задающий орган манипулятора | 1986 |
|
SU1393619A1 |
| ПОВОРОТНЫЙ ПРИВОД ЗВЕНА РЕЗОНАНСНОЙ МЕХАНИЧЕСКОЙ РУКИ | 2003 |
|
RU2271273C2 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
| ВПТБ -г.|'1||?1 t*'?f^n^'"Tp.-.7 I | 1973 |
|
SU406718A1 |
Изобретение относится к робото- ний руки 2 2 технике. Цель повышение про ремещении мех лятора из одн ного положени и1ествляется с 7,8, связываю А, к подвижно водят дополни сирующую поте теме, с помощ соответствующ рабочую среду установленных пневмоструйны ленных на осн также роль фи ний руки 2 2 технике. Целью изобретения является повышение производительности. При перемещении механической руки 2 манипу- лятора из одного крайнего фиксированного положения в другое, которое осу- и1ествляется системой упругих элементов 7,8, связывающих руку 2 с основанием А, к подвижной части манипулятора под- водят дополнительную энергию, компенсирующую потери в колебательной системе, с помощью потока рабочей среды соответствующего направления. Подводят рабочую среду либо с помощью сопел, установленных на руке, либо с помощью пневмоструйных схватов 5 и 6, установленных на основании 4 и выполняющих а также роль фиксаторов крайних положес„ и 1 з„п, ф-лы, 3 ил. (Л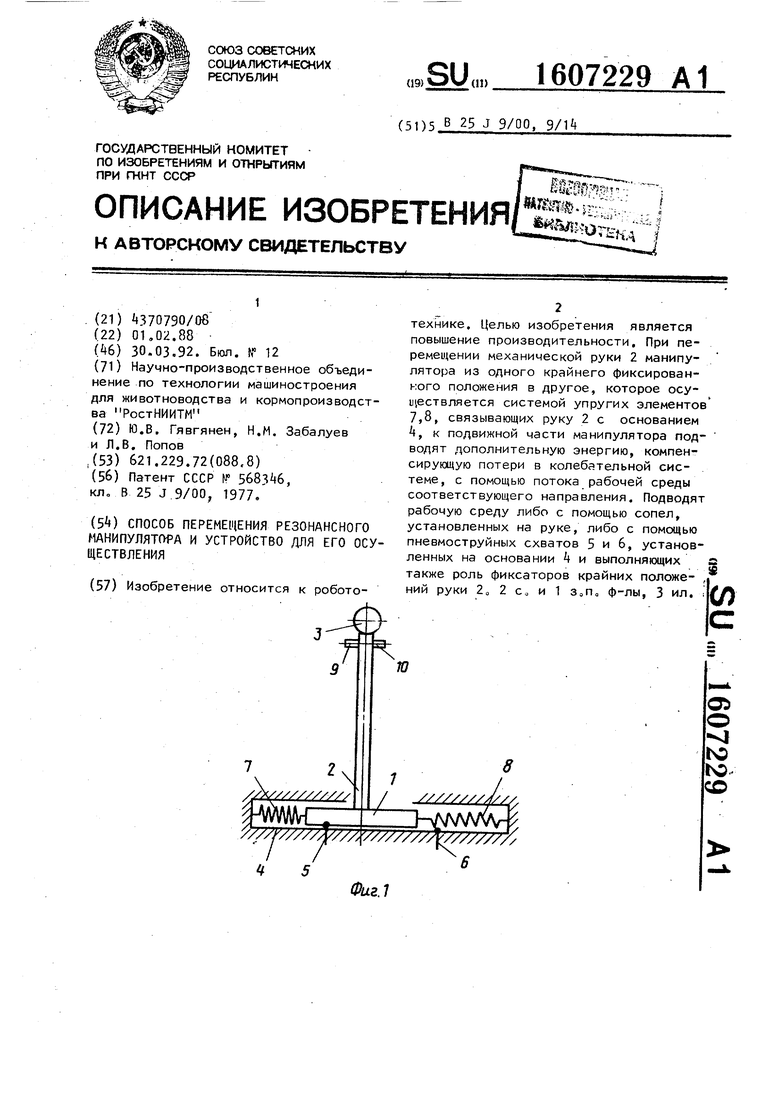
хАу
Х/уУ//////////
f
hWWK
/7/
-НЛЛЛДг
/ /// ////////////////// /
v и.г.г
М
/ / Х/У/Х///; ; хх
-НЛЛЛДг
//////////// /
//M /////f////////// Фиг.З
Редактор О, Юркова
1ехред Л.Олейник
Заказ 13184 иражПодписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
Корректор X, Зрдейи
| Механическая рука | 1975 |
|
SU568346A3 |
