Изобретение относится к области судовождения, в частности к системам автоматического управления движением судна.
Наиболее близким к изобретению является устройство для автоматического вывода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера и удержания его на этой траектории, которое содержит автоматический регулятор путевого угла, датчики координат центра масс судна, путевого угла, угловой скорости поворота судна в горизонтальной плоскости, продольной скорости судна, угла перекладки руля, выходы которых соединены соответственно с первым, вторым, третьим, четвертым и пятым входами автоматического регулятора путевого угла, снабженного вычислителем заданных параметров и бокового отклонения с тремя входами, первый вход которого образует одноименный вход автоматического регулятора путевого угла автоматического регулятора путевого угла, и вычислителем сигнала управления с шестью входами, второй, третий, четвертый и пятый входы которого образуют одноименные входы автоматического регулятора путевого угла, первый вход которого образован выходом вычислителя заданных параметров движения и бокового отклонения, а выход упомянутого автоматического регулятора, образованный выходом вычислителя сигнала управления, подключен к рулевому приводу, механически связанному с рулем, который механически соединен с датчиком угла перекладки руля и корпусом судна, с которым механически связаны датчики координат центра масс судна, путевого угла, угловой скорости поворота судна в горизонтальной плоскости, продольной скорости судна, блок расчета теоретической траектории перехода из начальной точки на заданную прямолинейную траекторию прохождения узкого участка фарватера с шестью входами и тремя выходами и блок постоянной памяти с тремя выходами, в который записаны параметры заданной траектории прохождения узкого участка фарватера, минимальный радиус кривизны траектории движения судна, коэффициенты закона управления, первый выход которого соединен с шестым входом упомянутого автоматического регулятора, а второй и третий выходы блока постоянной памяти подключены к пятому и шестому входам упомянутого блока расчета теоретической траектории, первый, второй, третий и четвертый входы которого соединены соответственно с выходами датчиков координат центра масс судна, путевого угла, угловой скорости порота судна в горизонтальной плоскости и продольной скорости, первый и второй выходы упомянутого блока расчета теоретической траектории подключены соответственно к седьмому и восьмому входом автоматического регулятора путевого угла, а третий выход упомянутого блока расчета теоретической траектории служит для формирования сигнала судоводителю (патент RU 2406645 C1, G01C 21/14, опубликован 14.08.2009).
Недостатком устройства для автоматического вывода судна на заданную прямолинейную траекторию является отсутствие учета ограничений на величину сигнала управления при формировании теоретической траектории перевода судна из начальной точки на заданную прямолинейную траекторию. В патенте RU 2406645 C1, G01C 21/14 теоретическая траектория используется как исполнительная. На достаточно высокой скорости движения судна превышение сигналом управления допустимой величины может привести к возникновению аварийной ситуации, а неполная отработка расчетной величины сигнала управления приводит к повышению отклонения судна от исполнительной траектории движения.
Техническим результатом является повышение безопасности изменения направления движения судна за счет сохранения устойчивости, что является важным для скоростных судов при планировании и выполнении маневра уклонения в случае появления опасного объекта.
Указанный технический результат достигается тем, что в устройство для формирования траектории перевода судна на новый курс, содержащее вычислитель траектории перевода судна на новый курс с возможностью вычисления двумерных коэффициентов полиномиальной кривой, являющейся траекторией перехода судна на новый курс, выход которого предназначен для подачи управляющего сигнала судоводителю или авторулевому, вычислитель минимального радиуса кривизны, датчики продольной скорости, координат центра масс, и путевого угла, введены задатчик угла изменения курса, задатчик абсолютной величины максимально допустимого сигнала δmax управления, вычислитель граничных параметров перевода судна на новый курс, при этом первый, второй и третий входы вычислителя минимально допустимого радиуса кривизны траектории перевода судна на новый курс соединены соответственно с выходами задатчика угла изменения курса, задатчика абсолютной величины максимально допустимого сигнала δmax и датчика продольной скорости, а выход подключен ко второму входу вычислителя граничных параметров траектории перевода судна на новый курс, первый, третий и четвертый входы которого соединены соответственно с выходами задатчика угла изменения курса, датчика координат центра масс и датчика путевого угла, а выход вычислителя граничных параметров траектории перевода судна на новый курс подключен ко входу вычислителя траектории перевода судна на новый курс, который выполнен с возможностью вычисления такой траектории, что движение по ней выполняется при абсолютной величине сигнала управления, не превышающего δmax, что обеспечивает сохранение устойчивости движения.
На фиг.1 представлена структурно-функциональная схема устройства для формирования траектории перевода судна на новый курс с соблюдением ограничений на диапазон изменения сигнала управления.
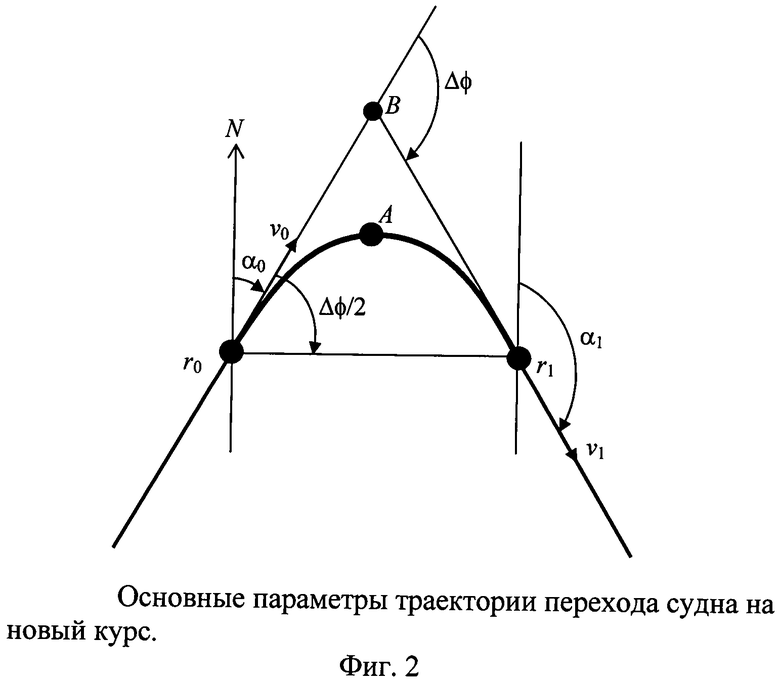
На фиг.2 - основные параметры траектории перехода судна на новый курс.
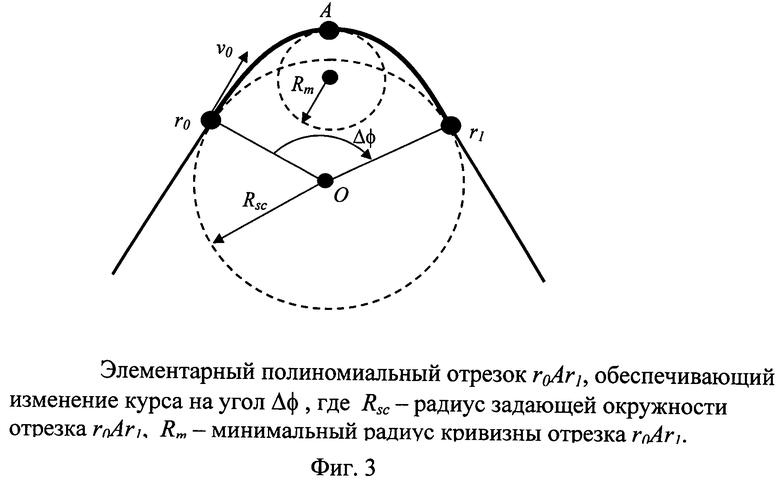
На фиг.3 - элементарный полиномиальный отрезок r0Ar1, обеспечивающий изменение курса на угол Δϕ, где Rsc - радиус задающей окружности отрезка r0Ar1, Rm - минимальный радиус кривизны отрезка r0Ar1.
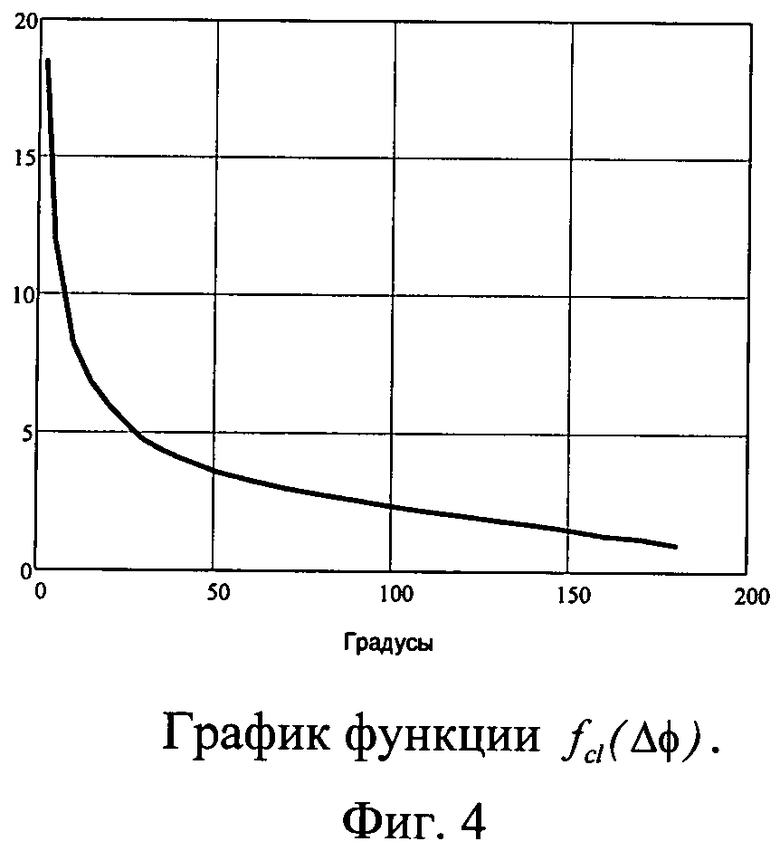
На фиг.4 - график функции fcl(Δϕ).
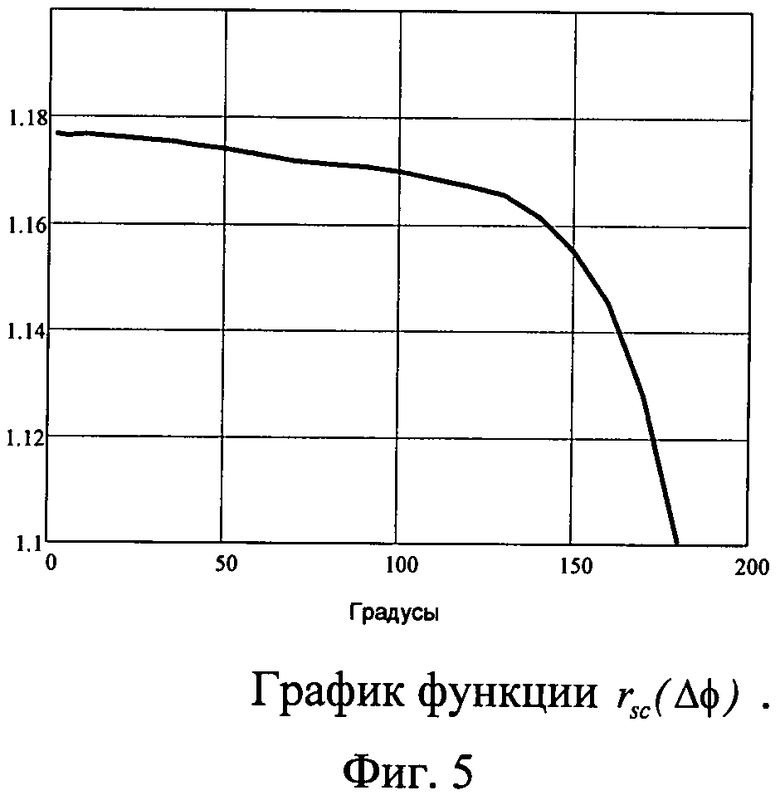
На фиг.5 - график функции rsc(Δϕ).
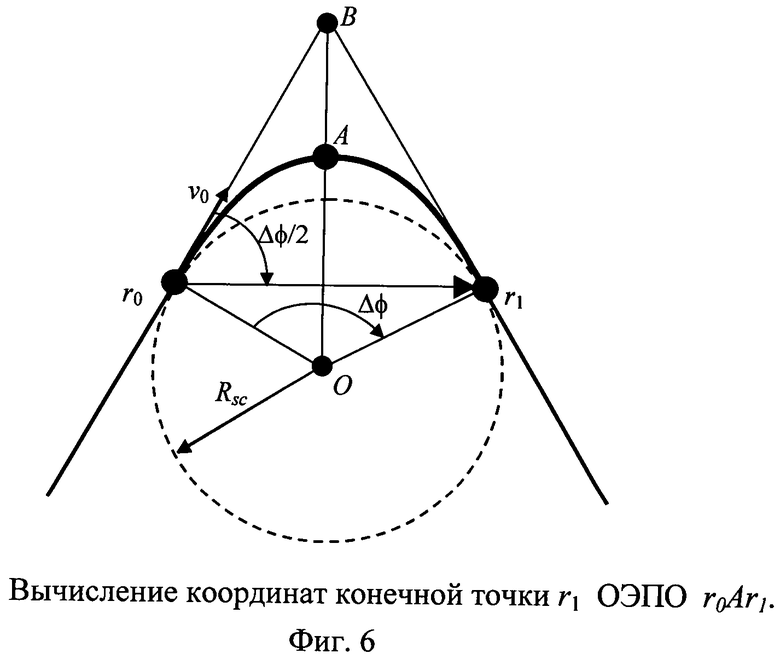
На фиг.6 - вычисление координат конечной точки r1 ОЭПО r0Ar1.
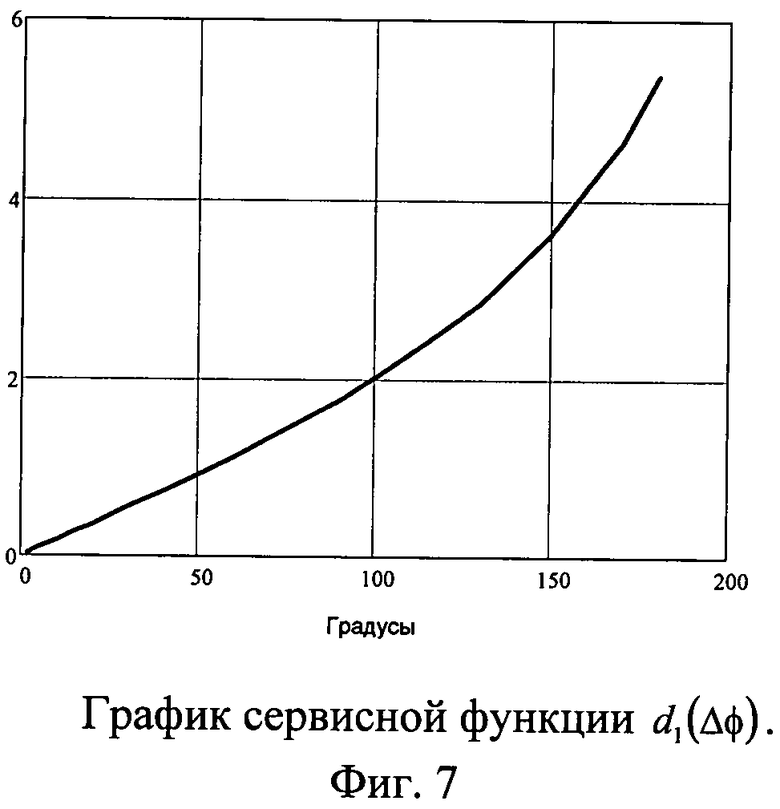
На фиг.7 - график сервисной функции d1 (Δϕ).
Устройство для формирования траектории перевода судна на новый курс содержит задатчик 1 абсолютной величины максимально допустимого сигнала δmax управления, датчик 2 продольной скорости, задатчик 3 угла изменения курса, вычислитель 4 минимально допустимого радиуса кривизны траектории перехода на новый курс с тремя входами и одним выходом, датчик 5 координат центра масс судна, вычислитель 6 граничных параметров траектории перехода на новый курс с четырьмя входами и одним выходом, датчик 7 путевого угла, вычислитель 8 траектории перевода судна на новый курс, выполненный с возможностью вычисления двумерных коэффициентов полиномиальной кривой, являющейся траекторией перехода на новый курс, с одним входом и одним выходом
Выход задатчика 1 абсолютной величины максимально допустимого сигнала управления связан со вторым входом вычислителя 4, выход датчика 2 продольной скорости связан с третьим входом вычислителя 4, выход задатчика 3 угла изменения курса связан с первым входом вычислителя 4. Выход вычислителя 4 связан со вторым входом вычислителя 6, выход задатчика 3 угла изменения курса связан с первым входом вычислителя 6, выход датчика 5 координат центра масс судна связан с третьим входом вычислителя 6, выход датчика 7 путевого угла связан с четвертым входом вычислителя 6. Выход вычислителя 6 связан с входом вычислителя 8. Выход вычислителя 8 связан с входом авторулевого ли сигнал с выхода вычислителя поступает судоводителю, использующего траекторию перехода на новый курс в качестве исполнительной траектории.
На фиг.2 показана траектория перехода на новый курс r 0 Ar 1,
где r0, r1 - координаты начальной и конечной точек траектории r 0 Ar 1, соответственно,
Δϕ - угол изменения курса,
α0, α1 - направления касательных в начальной и конечной точках траектории r 0 Ar 1, соответственно.
В тоже время параметры α0, α1 являются путевыми углами судна в начальной и конечной точках траектории r0Ar1, соответственно, и курсами судна на прямых участках траектории, примыкающих к траектории r 0 Ar 1.
Введем следующие обозначения.
U=|v0| - абсолютная величина путевой скорости судна,
δmax - предельная величина перекладки руля при абсолютной величине продольной скорости судна U, обеспечивающая сохранение устойчивости.
где ω - угловая скорость поворота корпуса судна в горизонтальной плоскости,
Под элементарным полиномиальным отрезком (ЭПО) будем понимать полиномиальную кривую P5(u) пятой степени в базисе Бернштейна [2], у которой кривизна в начальной и конечной точках равна нулю.

где {A0, A1, A2, A3, A4, A5} - двумерные коэффициенты,

u - скалярный параметр, принимающий значения в диапазоне от 0 до 1.
Для траектории, состоящей из ЭПО и отрезков прямых, равенство нулю кривизны в граничных точках ЭПО обеспечивает физически реализуемый (безударный) переход судна с одного отрезка траектории на другой.
Будем считать, что абсолютная величина путевой скорости судна вдоль траектории U постоянна.
Задачу построения ЭПО перехода на новый курс будем рассматривать в декартовой системе координат, у которой ось X направлена на восток, а ось Y - на север. ЭПО однозначно определяется значениями следующих параметров в граничных точках [2].
{r0,α0,d0,c0,r1,α1,d1,c1},
где r0,, r1 - координаты начальной и конечной точек ЭПО, соответственно,
α0, α1 - направления касательных в начальной и конечной точках ЭПО, соответственно,
d0,, d1 - длины касательных в начальной и конечной точках ЭПО, соответственно,
c0,, c1 - кривизна в начальной и конечной точках ЭПО, соответственно, Значения следующих параметров выводятся из условий задачи:
α0 = arctg(v0x/v0y), α1=α0+Δϕ, c0=0, c1=0
где α0,, α1 - направления касательных в начальной и конечной точках ЭПО, соответственно,
с0,, c1 - кривизна в начальной и конечной точках ЭПО, соответственно.
Δϕ - угол изменения курса,
Задача построения ЭПО перехода на новый курс состоит в том, чтобы найти значения d0, r1, d1, которые задают такую траекторию, что при управлении движением судна по этой траектории абсолютная величина отклонения руля не превышает δmax.
Если заданы абсолютная величина путевой скорости U и ограничение на угол перекладки руля δmax то минимальный радиус кривизны допустимой траектории перехода на новый курс Rm должен быть не меньше некоторой величины, определяемой дифференциальным уравнением модели продольного движения судна. Допустимые траектории перехода на новый курс можно искать среди ЭПО, которые строятся с помощью решения следующей экстремальной задачи. Найти такие d0 и d1, которые обеспечивают максимум минимального радиуса кривизны траектории перехода на новый курс α1 при заданных r0, r1, r0, r1, α0, α1, c0=0 и c1=0 [2]. Элементарные полиномиальные отрезки, полученные в результате решения этой экстремальной задачи назовем оптимальными ЭПО (ОЭПО). Что бы условия экстремальной задача были полностью определены, необходимо задать расположение точки r1. Примем условие, что ОЭПО должна иметь осевую симметрию. Для обеспечения осевой симметрии ОЭПО [2] точку r1, будем располагать на луче, выходящем из точки r0 под углом 
ОЭПО, который обеспечивает изменение курса на угол Δϕ, и при управлении движением судна по этой траектории абсолютная величина сигнала управления не будет превышать δmax будем называть допустимым ОЭПО (ДОЭПО).
На основе результатов решения серии указанных экстремальных задач для Δϕ лежащих в диапазоне от 2° до 180° и использования свойства подобия ЭПО были построены сервисные функции rsc(Δϕ), fcl(Δϕ) и d1(Δϕ). Сервисные функции определены для ЭПО с Rm=1. Сервисные функции описаны ниже.
С элементарным полиномиальным отрезком можно связать понятие задающей окружности. Задающая окружность это окружность, которая проходит через граничные точки r0 и r1 элементарного полиномиального отрезка r0Ar1 и является касательной к элементарному полиномиальному отрезку в этих точках (фиг.3).
Устройство для формирования траектории перевода судна на новый курс с соблюдением ограничений на диапазон изменения сигнала управления работает следующим образом.
На первый, второй и третий входы вычислителя 4 подаются: величина изменения курса Δϕ, абсолютная величина максимально допустимого сигнала управления δmax, абсолютная величина скорости движения судна U, соответственно.
В процессе управления движением судна по криволинейной траектории максимальные по абсолютной величине сигналы управления могут быть или во внутренних или в граничных точках этой траектории.
Во внутренних точках ОЭПО, в которых угловая скорость судна максимальна по абсолютной величине, производная угловой скорости судна равна нулю 

где 
U - абсолютная величина путевой скорости судна,
ωmax - максимальная угловая скорость судна в горизонтальной плоскости.
Т.к. в граничных точках ОЭПО с0=с1=0, то угловые скорости тоже равны нулю (ω0=ω1=0). С помощью выражения 


где 
Δϕ - угол изменения курса,
fcl(Δϕ) - сервисная функция, график которой приведен на фиг.4,
U - абсолютная величина путевой скорости судна,

В вычислителе 4 с помощью следующего выражения находится минимальный радиус кривизны Rm ОЭПО, который обеспечивает изменение курса на угол Δϕ, и при управлении движением судна по этой траектории абсолютная величина сигнала управления не будет превышать δmax

где Rm - минимальный радиус кривизны ДОЭПО,

Результатом работы вычислителя 4 является минимальный радиус кривизны Rm ДОЭПО, который подается на выход.
На входы 1, 2, 3, и 4 вычислителя 6 подаются: величина изменения курса Δϕ, минимальный радиус кривизны Rm ДОЭПО, координаты начальной точки ДОЭПО r0, путевой угол в начальной точке ДОЭПО α0, соответственно.
Вычислитель 6 выполняет расчет параметров α0, α1, r1, d0, d1, обеспечивающих формирование полного набора граничных параметров исполнительной траектории перехода на новый курс.
α1=α0+Δϕ,
где α0 - путевой угол (курс) в начальной точке ДОЭПО перехода на новый курс,
α1 - путевой угол (курс) в конечной точке ДОЭПО,
Δϕ - угол изменения курса.
Радиус задающей окружности Rsc (фиг.3) вычисляется по формуле
Rsc=Rmrsc(Δϕ),
где Rm - минимальный радиус кривизны ДОЭПО,
Δϕ - угол изменения курса,
rsc(Δϕ) - сервисная функция, график которой приведен на фиг.5.
На фиг.5 показан график сервисной функции rsc(Δϕ).
Согласно фиг.6 координаты точки r1 могут быть вычислены с помощью следующего векторного выражения

где r0, r1 - координаты начальной и конечной точек траектории перехода на новый курс, соответственно,
Rsc - радиус задающей окружности,
Δϕ - угол изменения курса,
R(Δϕ/2) - матрица поворота двумерного вектора на угол,
ν0 - вектор скорости судна в начале траектории перехода на новый курс.
Длина касательных в граничных точках вычисляются по следующим формулам
d=Rmd1(Δϕ),
где d - длина касательных в начальной и конечной точках ДОЭПО,
Rm - минимальный радиус кривизны ДОЭПО,
Δϕ - угол изменения курса,
d1(Δϕ) - сервисная функция для вычисления длины касательных в граничных точках ОЭПО. График сервисной функции d1(Δϕ) показан на фиг.7.
Вычислитель 6 подает на свой выход набор граничных параметров ДОЭПО, являющейся исполнительной траекторией перехода на новый курс
{r0,α0,d,0,r1,α1,d,0}
где r0, r1 - координаты начальной и конечной точек траектории перехода на новый курс, соответственно,
α0, α1 - путевые углы в начальной и конечной точках траектории перехода на новый курс, соответственно,
d - длина касательных в начальной и конечной точках ДОЭПО.
Вычислитель 8 принимает на свой вход набор граничных параметров траектории перехода на новый курс. Выполняет преобразование набора граничных параметров траектории перехода на новый курс в двумерные коэффициенты полинома Р5(u), задающего указанную траекторию. Преобразование выполняется по следующим формулам.
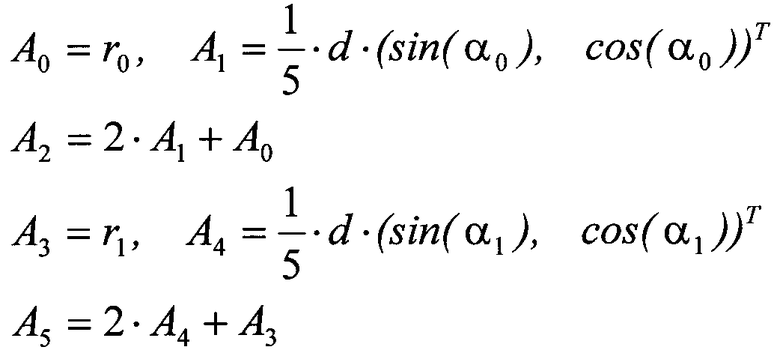
где Ai - двумерные коэффициенты полинома Р5(u) (i = 0..5),
r0, r1 - координаты начальной и конечной точек траектории перехода на новый курс, соответственно,
α0 , α1 - путевые углы в начальной и конечной точках траектории перехода на новый курс, соответственно,
d - длина касательных в начальной и конечной точках ДОЭПО.
Результатом работы вычислителя 8 и всего устройства является набор коэффициентов {А0, А1 А2, A3, А4, А5} полинома Р5(u). Набор коэффициентов {А0, А1 А2, A3, А4, А5} является математическим представлением траектории перевода судна на новый курс. Набор коэффициентов {А0, А1, А2, A3, A4, А5} с выхода вычислителя 8 поступает на вход авторулевого и/или индикатора отклонения от заданной траектории для использования его в качестве исполнительной траектории (задающего сигнала).
В работе авторулевого, как автоматической следящей системы управления движением судна, может быть использован любой алгоритм вычисления сигнала управления, предназначенный для управления движением судна по заданной криволинейной траектории, например, описанный в [3].
Вычислительный эксперимент показал, что использование исполнительной траектории перехода на новый курс, поступающей на выход вычислителя 8, в качестве задающего сигнала авторулевого обеспечивает точное движение по этой исполнительной траектории при этом сигнал управления не выходит из заданного диапазона.
Список литературы
1. Fossen Thor I. Marine control systems. Marine Cybernetics. - Trondheim. Norway. - 2002.
2. Довгоброд Г.М., Клячко Л.М., Рогожников A.B. Использование параметрической аппроксимации при планировании траекторий движения аппаратов // Изв. Вузов. Приборостроение. 2009. Т.52. №9. С.11-17.
3. Довгоброд Г.М. Разработка адаптивного алгоритма управления движением судна по криволинейной траектории с помощью метода попятного синтеза управления // Гироскопия и навигация. 2011. №4. С.22-31.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ПЕРЕВОДА СУДНА НА ПАРАЛЛЕЛЬНЫЙ КУРС С СОБЛЮДЕНИЕМ ОГРАНИЧЕНИЙ НА ДИАПАЗОН ИЗМЕНЕНИЯ СИГНАЛА УПРАВЛЕНИЯ | 2012 |
|
RU2515006C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПОДХОДА СУДНА К ПРИЧАЛУ | 2009 |
|
RU2403169C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВЫВОДА СУДНА НА ЗАДАННУЮ ПРЯМОЛИНЕЙНУЮ ТРАЕКТОРИЮ ПРОХОЖДЕНИЯ УЗКОГО УЧАСТКА ФАРВАТЕРА И УДЕРЖАНИЯ ЕГО НА ЭТОЙ ТРАЕКТОРИИ | 2009 |
|
RU2406645C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2021 |
|
RU2759068C1 |
| СПОСОБ МОРСКОЙ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ | 2010 |
|
RU2440592C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ | 2010 |
|
RU2426154C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОГРАММНЫМИ ДВИЖЕНИЯМИ СУДНА ПО ТРАЕКТОРИИ | 2015 |
|
RU2596202C1 |
| СПОСОБ КООРДИНИРОВАННОГО МАНЕВРИРОВАНИЯ СУДНА | 2010 |
|
RU2429161C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2324207C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО РАСХОЖДЕНИЯ СУДНА СО ВСТРЕЧНЫМ ОБЪЕКТОМ | 2008 |
|
RU2376194C1 |
Изобретение относится к области судовождения, в частности к системам автоматического управления движением судна. Техническим результатом является повышение безопасности изменения направления движения судна за счет сохранения устойчивости. Технический результат достигается за счет устройства для формирования траектории перевода судна на новый курс, которое содержит вычислитель траектории перевода судна на новый курс с возможностью вычисления двумерных коэффициентов полиномиальной кривой, являющейся траекторией перехода судна на новый курс, выход которого предназначен для подачи задающего сигнала судоводителю или авторулевому, вычислитель минимального радиуса кривизны, датчики продольной скорости, координат центра масс и путевого угла, задатчик угла изменения курса, задатчик абсолютной величины максимально допустимого сигнала управления, вычислитель граничных параметров перевода судна на новый курс; вычислитель траектории перевода судна на новый курс выполнен с возможностью вычисления такой траектории, что движение по ней выполняется при абсолютной величине сигнала управления, не превышающего максимально допустимого. 7 ил.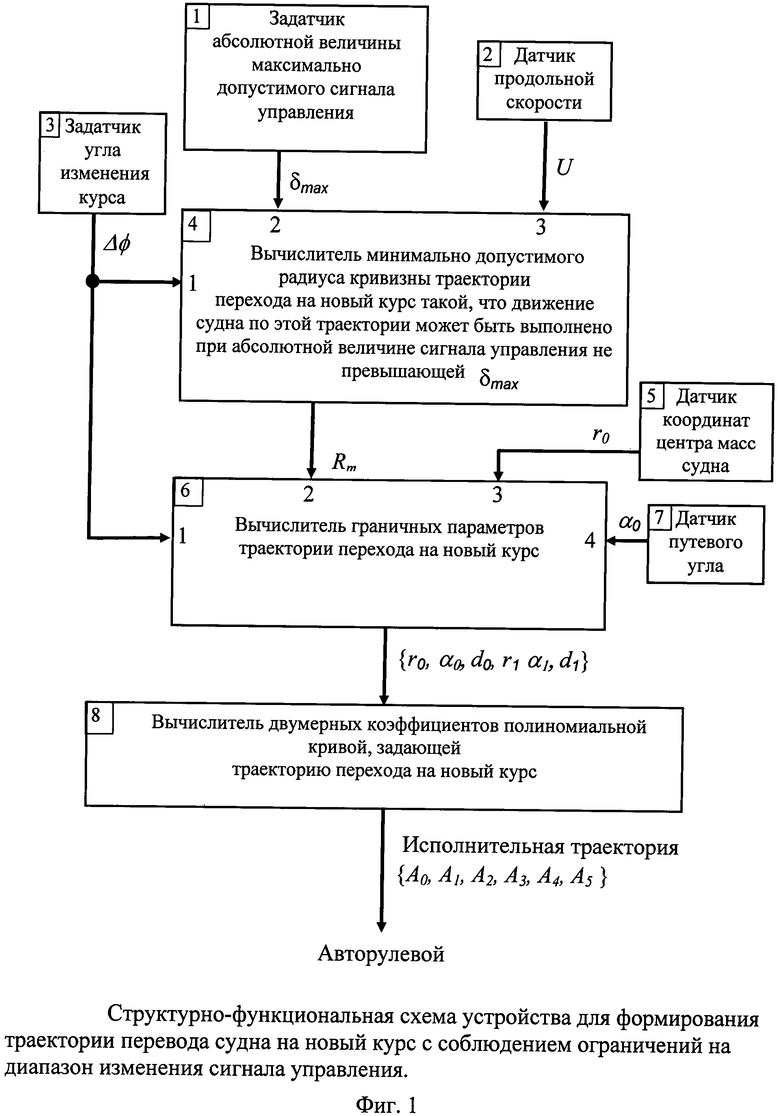
Устройство для формирования траектории перевода судна на новый курс, содержащее вычислитель траектории перевода судна на новый курс с возможностью вычисления двумерных коэффициентов полиномиальной кривой, являющейся траекторией перехода судна па новый курс, выход которого предназначен для подачи задающего сигнала судоводителю или авторулевому, вычислитель минимального радиуса кривизны, датчики продольной скорости, координат центра масс, и путевого угла, отличающееся тем, что введены задатчик угла изменения курса, задатчик абсолютной величины максимально допустимого сигнала управления, вычислитель граничных параметров перевода судна на новый курс, при этом первый, второй и третий входы вычислителя минимально допустимого радиуса кривизны траектории перевода судна на новый курс соединены соответственно с выходами задатчика угла изменения курса, задатчика абсолютной величины максимально допустимого сигнала и датчика продольной скорости, а выход подключен ко второму входу вычислителя граничных параметров траектории перевода судна на новый курс, первый, третий и четвертый входы которого соединены соответственно с выходами задатчика угла изменения курса, датчика координат центра масс и датчика путевого угла, а выход вычислителя граничных параметров траектории перевода судна на новый курс подключен к входу вычислителя траектории перевода судна на новый курс, который выполнен с возможностью вычисления такой траектории, что движение по ней выполняется при абсолютной величине сигнала управления, не превышающего максимально допустимого.
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВЫВОДА СУДНА НА ЗАДАННУЮ ПРЯМОЛИНЕЙНУЮ ТРАЕКТОРИЮ ПРОХОЖДЕНИЯ УЗКОГО УЧАСТКА ФАРВАТЕРА И УДЕРЖАНИЯ ЕГО НА ЭТОЙ ТРАЕКТОРИИ | 2009 |
|
RU2406645C1 |
| СПОСОБ КООРДИНИРОВАННОГО МАНЕВРИРОВАНИЯ СУДНА | 2010 |
|
RU2429161C1 |
| УСТРОЙСТВО ИСКЛЮЧЕНИЯ СТОЛКНОВЕНИЯ СУДНА С ВСТРЕЧНЫМ ДВИЖУЩИМСЯ ОБЪЕКТОМ | 2008 |
|
RU2383464C1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

