Изобретение относится к авиационной технике, в частности к системам управления и управляющим устройствам летательных аппаратов, и может быть использовано при проектировании систем управления аэродинамическими поверхностями самолета, например интерцепторами.
Известно устройство для управления аэродинамическими поверхностями самолета содержащее ручку управления, подключенную к входам двух каналов управления, каждый из которых включает задающий датчик, соединенный с первым входом сумматора, второй вход которого связан с датчиком обратной связи, а выход - с входом головки управления рулевой машины, шток которой связан с датчиком обратной связи, датчиком синхронизации и аэродинамической поверхностью самолета, а также усилитель синхронизации, входы которого подключены к выходам датчиков синхронизации каналов управления.
Недостатком известного устройства является низкая надежность, обусловленная возможностью несимметричного перемещения аэродинамических поверхностей при обрыве проводов питания или движка датчика синхронизации рулевой машинки.
Наиболее близким к предложенному техническому решению является устройство для управления аэродинамическими поверхностями самолета. Устройство содержит ручку управления, с которой кинематически связаны задающие датчики каналов, выходы датчиков соединены соответственно с входами сумматоров и с входами формирователя сигналов "выпуск-уборка", выходы сумматора соединены с головками управления рулевых машин, штоки которых связаны с аэродинамическими поверхностями.
Датчики обратной связи соответственно соединены с входами сумматоров и с входами формирователя сигнала "выпуск-уборка", а датчики синхронизации - с входами формирователя сигнала рассогласования и усилителя синхронизации, выход которого через ключи соединен с входами сумматоров. Выходы формирователей подключены к входам элементов И, выходы которых через элементы ИЛИ соединены с ключами.
Недостатком известного устройства является низкая надежность, обусловленная возможностью несимметричного перемещения аэродинамических поверхностей при обрыве проводов питания или движка датчика синхронизации рулевой машинки. Это возможно вследствие того, что формирователь сигнала рассогласования и усилитель синхронизации воспринимают обрыв питающих проводов или движка за сигнал отставания рулевой машинки, канал управления которой неисправен, и останавливают перемещение штока рулевой машинки в исправном канале, пытаясь его синхронизировать. В это же время шток рулевой машинки неисправного канала продолжает перемещаться, в результате чего происходит несинхронное перемещение аэродинамических поверхностей.
При перемещении на уборку формирователь сигнала рассогласования и усилитель синхронизации при обрывках питающих проводов или движка датчика синхронизации останавливают шток рулевой машинки неисправного канала управления, а шток рулевой машинки исправного канала продолжает перемещение.
Целью настоящего изобретения является повышение надежности управления аэродинамическими поверхностями самолета путем исключения несимметричного перемещения рулевых машин.
Поставленная цель достигается тем, что в устройство для управления аэродинамическими поверхностями самолета вводятся четыре компаратора, третий и четвертый ключевые элементы с размыкающим контактом каждый, два задатчика опорных напряжений и третий элемент ИЛИ, при этом выход первого задатчика опорного напряжения соединен с первыми входами первого и второго компараторов, выход второго задатчика опорного напряжения соединен с первыми входами третьего и четвертого компараторов, вторые входы первого и третьего компараторов соединены с выходом второго датчика обратной связи, вторые входы второго и четвертого компараторов соединены с выходом первого датчика обратной связи, выходы первого, второго, третьего и четвертого компараторов соединены соответственно с первым, вторым, третьим и четвертым входами третьего элемента ИЛИ, выход которого соединен с управляющими входами третьего и четвертого ключевых элементов, сигнальные входы которых соединены с выходами соответствующего первого и второго алгебраических сумматоров, выходы третьего и четвертого ключевых элементов соединены с входом соответствующей головки управления рулевой машины, при этом выход первого датчика обратной связи соединен с первыми входами блока синхронизации и формирователя сигналов рассогласования рулевых машин, выход второго датчика обратной связи соединен с вторыми входами блока синхронизации и формирователя сигналов рассогласования рулевых машин.
На чертеже изображена функциональная схема устройства управления аэродинамическими поверхностями самолета.
Данное устройство содержит:
1 - ручка управления; 2, 3 - первый и второй датчики положения ручки управления, 4, 5 - первый и второй алгебраические сумматоры, 6 - формирователь сигналов, "выпуск-уборка", 7 - блок синхронизации, 8 - формирователь сигнала рассогласования рулевых машин, 9, 10 головки управления рулевых машин 11, 12, штоки которых соединены с аэродинамическими поверхностями самолета 13, 14 и первым и вторым датчиками обратной связи 15, 16, первый, второй, третий, четвертый ключевые элементы 17, 18, 19, 20, первый 21, третий 22, второй 23, четвертый 24 элементы И, первый, второй, третий и четвертый компараторы 27, 28, 29, 30, первый и второй задатчики опорных напряжений 31, 32 и третий элемент ИЛИ 33.
Работает устройство следующим образом.
При перемещении рукоятки управления 1, например, на выпуск, датчики 2, 3 положения ручки управления выдают электрический сигнал на входы алгебраических сумматоров 4, 5, где эти сигналы сравниваются с сигналами датчиков обратной связи 15, 16. Разность этих сигналов усиливается и поступает через ключевые элементы 19, 20 на головки управления 9, 10 рулевых машин 11, 12, которые обрабатывают управляющий сигнал. Сигнал с датчиков 2, 3 положения ручки управления подается также на входы формирователя 6 (в качестве которого можно использовать поляризованный релейный усилитель), на выходе которого появляется сигнал "выпуска", который подается на первые входы элементов И 22, 24, вторые входы этих элементов соединены с выходами формирователя 8 (в качестве которого можно использовать поляризованный релейный усилитель). При синхронном перемещении приводов ни на одном из выходов в формирователе 8 сигнала нет. Поэтому не будет сигнала на выходе ни на одном из элементов И и ключевые элементы 17, 18 останутся разомкнутыми, нет сигнала и на выходе блока синхронизации 7. В случае, если, например, рулевая машинка 11 имеет большую скорость на выпуск (опережает отстающую 12) на первом выходе формирователя 8 появится сигнал, который поступает на второй вход элемента И 22, на выходе которого появится сигнал.
Этот сигнал через схему ИЛИ 25 включает ключевой элемент 17 и сигнал с блока синхронизации 7 поступит на вход алгебраического сумматора 4. Полярность и величина сигнала с блока синхронизации 7 определяются полярностью и величиной входного рассогласования, они имеют такое значение, что уменьшается входной сигнал алгебраического сумматора 4. При этом уменьшается сигнал на головке управления рулевой машинки 11 и ее скорость уменьшается. Синхронность перемещения рулевых машинок 11, 12 восстанавливается, на первом выходе формирователя 8 и на выходе элемента И 22 сигналы исчезают. Ключевой элемент 17 размыкается и разрывает цепь блока синхронизации 7 с алгебраическим сумматором 4.
При большей скорости рулевой машинки 12 работа схемы аналогична, только при этом сигнал появляется на втором выходе формирователя 8, на выходе элемента И 24 и через схему ИЛИ 26 включает ключевой элемент 18. Сигнал с блока синхронизации 7 поступает на вход алгебраического сумматора 5, уменьшая сигнал на его входе, чем уменьшается сигнал на головке управления рулевой машинки 12 и ее скорость уменьшается. Синхронность перемещения восстанавливается, исчезает сигнал на выходе блока синхронизации 7, а на втором выходе формирователя 8 ключевой элемент 20 разрывает цепь, т. е. на выходе ключевого элемента 20 сигнала нет.
При остановке одной из рулевых машинок 11 или 12 величина сигнала с блока синхронизации 7 обеспечивает полную остановку опережающей рулевой машинки.
При обрыве провода питания или движка датчика обратной связи 15 или датчика обратной связи 16, являющихся датчиками синхронизации, срабатывают компараторы 27 или 28, которые срабатывают в случае, если напряжение задатчика опорного напряжения 31 больше напряжения с датчика обратной связи 15 или датчика обратной связи 16.
На выходе компаратора 27 или 28 появляется сигнал, который через элемент ИЛИ 33 поступает на управляющие входы ключевых элементов 19, 20 и цепи управляющего сигнала головками управления 9, 10 разрываются ключами 7, 8, вследствие чего штоки рулевых машинок 11, 12 и кинематически связанные с ними аэродинамические поверхности 13, 14 убираются.
При обрыве нулевого провода питания датчика обратной связи 15 или датчика обратной связи 16 срабатывают компараторы 29 или 30, которые срабатывают в случае, если напряжение задатчика опорного напряжения 32 меньше напряжения с датчика обратной связи 15 или датчика обратной связи 16.
На выходе компаратора 29 или 30 появится сигнал, который через элемент ИЛИ 33 поступает на управляющие входы ключевых элементов 19, 20 и цепи управляющего сигнала головками управления 9, 10 разрываются ключевыми элементами 19, 20 и штоки рулевых машинок 11, 12 убираются.
Предлагаемая схема осуществляет контроль обрыва датчиков обратной связи являющихся и датчиками синхронизации и отключает оба канала управления рулевыми машинками, препятствуя несимметричному перемещению аэродинамических поверхностей.
(56) Лебедев А. А. , Карабанов В. А. Динамика систем управления беспилотными летательными аппаратами. М. : Машиностроение, 1965, стр 265.
Авторское свидетельство СССР N 917456, кл. B 64 C 13/00, 1980.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления аэродинамическими поверхностями самолета | 1980 |
|
SU917456A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ | 2009 |
|
RU2430397C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОСАДКОЙ САМОЛЕТА | 1993 |
|
RU2040434C1 |
| Устройство для моделирования аэродинамических нагрузок | 1981 |
|
SU1001122A1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И БЛОК РУЛЕВОГО ПРИВОДА (ВАРИАНТЫ) | 2005 |
|
RU2288439C1 |
| Система адаптивного управления электрогидравлическим следящим приводом с контролем | 2015 |
|
RU2610851C1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ АЭРОДИНАМИЧЕСКИХ | 1973 |
|
SU405116A1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОМ ТАНГАЖА ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2461041C1 |
| РЕЛЕ СИНХРОНИЗАЦИИ | 2003 |
|
RU2233500C1 |
Изобретение относится к авиационной технике, в частности к системам управления и управляющим устройствам летательных аппаратов и может быть использовано при проектировании систем управления аэродинамическими поверхностями самолета, например, интерцепторами. Цель изобретения состоит в повышении надежности управления аэродинамическими поверхностями самолета путем исключения несимметричного перемещения рулевых машин. Для этого в устройство вводят четыре компаратора 27, 28, 29, 30, два задатчика опорных напряжений 31, 32, третий и четвертый ключевые элементы 19, 20 с размыкающимися контактами, при этом выход первого датчика обратной связи 15 соединен с первыми входами блока синхронизации 7 и формирователем сигнала рассогласования рулевых машин 8, вторые входы которых соединены с выходом второго датчика обратной связи 16. 1 ил.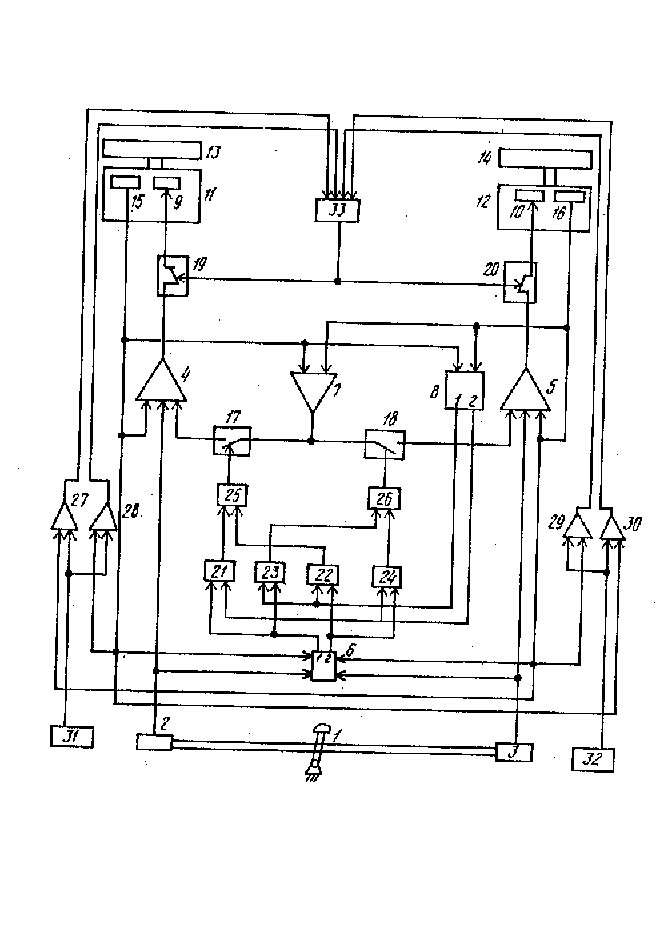
УСТРОЙСТВО УПРАВЛЕНИЯ АЭРОДИНАМИЧЕСКИМИ ПОВЕРХНОСТЯМИ САМОЛЕТА, содержащее два датчика положения ручки управления, два алгебраических сумматора, два датчика обратной связи, формирователь сигнала "Выпуск-уборка", формирователь сигнала рассогласования рулевых машин, четыре элемента И, два элемента ИЛИ, два ключевых элемента с замыкающим контактом каждый и блок синхронизации, при этом выход первого датчика положения ручки управления соединен с первыми входами первого алгебраического сумматора и формирователя сигнала "Выпуск-уборка", выход второго датчика положения ручки управления соединен с первым входом второго алгебраического сумматора и вторым входом формирователя сигнала "Выпуск-уборка", выходы первого и второго датчиков обратной связи соединены с вторыми входами соответственно первого и второго алгебраических сумматоров, а также соответственно с третьим и четвертым входами формирователя сигнала "Выпуск-уборка", первый выход которого соединен с первыми входами первого и второго элементов И, второй выход формирователя сигнала "Выпуск -уборка" соединен с первыми входами третьего и четвертого элементов И, выход первого элемента И соединен с первым входом первого элемента ИЛИ, второй вход которого соединен с выходом третьего элемента И, выход второго элемента И соединен с первым входом второго элемента ИЛИ, второй вход которого соединен с выходом четвертого элемента И, первый выход формирователя сигнала рассогласования рулевых машин соединен с вторыми входами второго и третьего элементов И, второй выход формирователя сигнала рассогласования рулевых машин соединен с вторыми входами первого и четвертого элементов И, выход первого элемента ИЛИ соединен с управляющим входом первого ключевого элемента, выход которого соединен с третьим входом первого алгебраического сумматора, выход второго элемента ИЛИ соединен с управляющим входом второго ключевого элемента, выход которого соединен с третьим входом второго алгебраического сумматора, выход блока синхронизации соединен с сигнальными входами первого и второго ключевых элементов, при этом штоки головок управления рулевых машин механически соединены с датчиками обратной связи и аэродинамическими поверхностями самолета, отличающееся тем, что, с целью повышения надежности управления аэродинамическими поверхностями самолета путем исключения несимметричного перемещения рулевых машин, в него введены четыре компаратора, третий и четвертый ключевые элементы с размыкающим контактом каждый, два задатчика опорных напряжений и третий элемент ИЛИ, при этом выход первого задатчика опорного напряжения соединен с первыми входами первого и второго компараторов, выход второго задатчика опорного напряжения соединен с первыми входами третьего и четвертого компараторов, вторые входы первого и третьего компараторов соединены с выходом второго датчика обратной связи, вторые входы второго и четвертого компараторов соединены с выходом первого датчика обратной связи, выходы первого, второго, третьего и четвертого компараторов соединены соответственно с первым , вторым, третьим и четвертым входами третьего элемента ИЛИ, выход которого соединен с управляющими входами третьего и четвертого ключевых элементов, сигнальные входы которых соединены с выходами соответствующего первого и второго алгебраических сумматоров, выходы третьего и четвертого ключевых элементов соединены с входом соответствующей головки управления рулевой машины, при этом выход первого датчика обратной связи соединен с первыми входами блока синхронизации и формирователя сигналов рассогласования рулевых машин, выход второго датчика обратной связи соединен с вторыми входами блока синхронизации и формирователя сигналов рассогласования рулевых машин.
