Изобретение относится к авиационной технике в частности к стабилизации положения беспилотного привязного летательного аппарата (БПЛА) относительно наземной станции привязного питания (СПП).
Привязные БПЛА применяются с целью поднятия полезной нагрузки на высоту и фиксации положения относительно СПП. Из-за погодных условий (ветра) БПЛА может смещаться относительно СПП. Для стабилизации положения БПЛА обычно применяют решения со сложной системой датчиков положения и автоматической регулировкой положения БПЛА, либо с ручной подстройкой положения БПЛА.
Известны БПЛА, которые имеют 4 и более винтомоторных групп (http://el-shema.ru/publ/radiosvjaz/multikoptery/4-l-0-72). Недостатком указанного БПЛА является сложность технического исполнения, так как винтомоторные группы располагаются на радиально расположенных балках. Это усложняет крепеж всей конструкции, требует наличия датчиков положения и сложной многофакторной обработки сигналов от них.
Известна система автоматического управления высотой полета беспилотного летательного аппарата по патенту РФ №2 290 346 (МПК В04С 13/18, G05D 1/04). Система обеспечивает стабилизацию высоты полета БПЛА без перерегулирования после быстрого изменения высоты полета.
Известен Способ увеличения продолжительности полета беспилотного летательного аппарата и Устройство для его осуществления. Патент РФ №2 403 184, МПК В64С 31/02. Данным изобретением решена задача увеличения продолжительности безмоторного полета БПЛА и планеров путем компенсации потерь высоты за счет использования энергии конвективных структур атмосферного пограничного слоя без участия оператора и увеличения подъемной силы беспилотного летательного аппарата на основе использования дополнительной подъемной силы, создаваемой упомянутыми конвективными структурами атмосферного пограничного слоя.
Известен Способ формирования интегрального адаптивного сигнала стабилизации планирующего движения беспилотного летательного аппарата и Устройство для его осуществления. Патент РФ №2 460 113, МПК G05D 1/08, G05B 13/00, G06F 7/00. Данным изобретением решена задача повышения точности управления в условиях широкого диапазона высот и скоростей полета и действия возмущающих факторов.
Однако описанные системы и способы имеют недостатки, поскольку требуют сложного управления пространственным положением БПЛА, и связаны с необходимостью многофакторной отработки сигналов датчиков, в том числе с учетом длины свободной привязи и подъемной силы летательного аппарата, с этим связаны недостаточная надежность, а также высокая стоимость оборудования для их реализации.
Наиболее близким решением к предлагаемому является Способ управления беспилотным привязным летательным аппаратом и беспилотный авиационный комплекс по патенту РФ №2 441 809, МПК В64С 39/02.
Беспилотный авиационный комплекс содержит наземную станцию, беспилотный летательный аппарат с движителем и его приводом, привязь, включающую силовой трос, связывающий наземную станцию с БПЛА, и многофункциональный кабель, а также механизм для регулирования длины привязи, и систему управления положением и стабилизации БПЛА.
Однако описанный способ управления положением и стабилизации БПЛА имеет недостатки, связанные с тем, что для реализации данного способа необходимо наличие в БПЛА датчиков положения и требуется сложная многофакторная обработка сигналов от них.
Технической задачей предлагаемого решения является увеличение полезной нагрузки в условиях бокового ветра при облегчении конструкции, тем самым упрощение системы стабилизации.
Эта задача решена тем, что в системе, содержащей БПЛА, снабженный расположенными в его корпусе полезной нагрузкой и двигателем, который связан с соосными разнонаправленными винтами, и аэродинамический стабилизатор (АДС), связанный с БПЛА жесткой связкой, к которой крепится кольцо силового троса, обеспечивающего связь со станцией привязного питания (СПП), при этом точка крепления силового троса к БПЛА выбрана так, что смещение БПЛА под воздействием бокового ветра компенсировано отклонением соосного винта в сторону ветра при удовлетворении соотношения:
F_БПЛА*r_БПЛА<F_АДС*r_АДС, где:
F_БПЛА - сила, действующая на БПЛА со стороны ветра;
r_БПЛА - расстояние от центра масс БПЛА до точки крепления силового троса на жесткой связке;
F_АДС - сила, действующая на АДС со стороны ветра;
r_АДС - расстояние от центра масс АДС до точки крепления силового троса на жесткой связке.
Сущность изобретения пояснена чертежом:
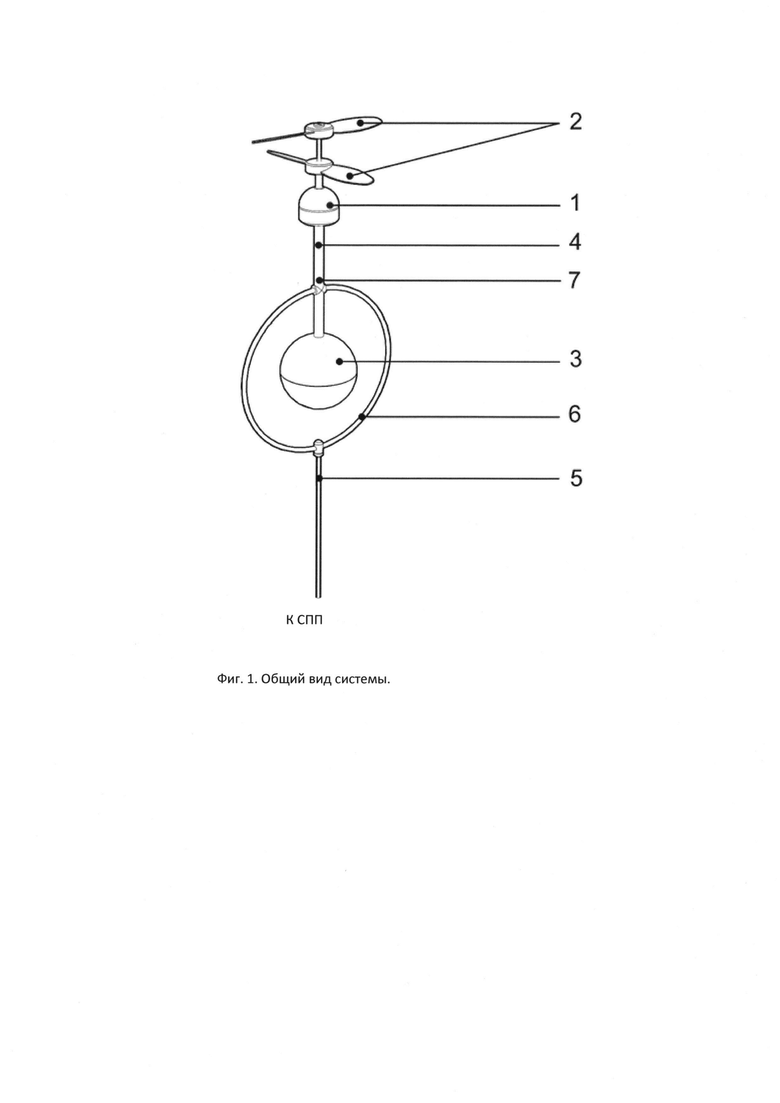
Фиг. 1 показан общий вид Системы.
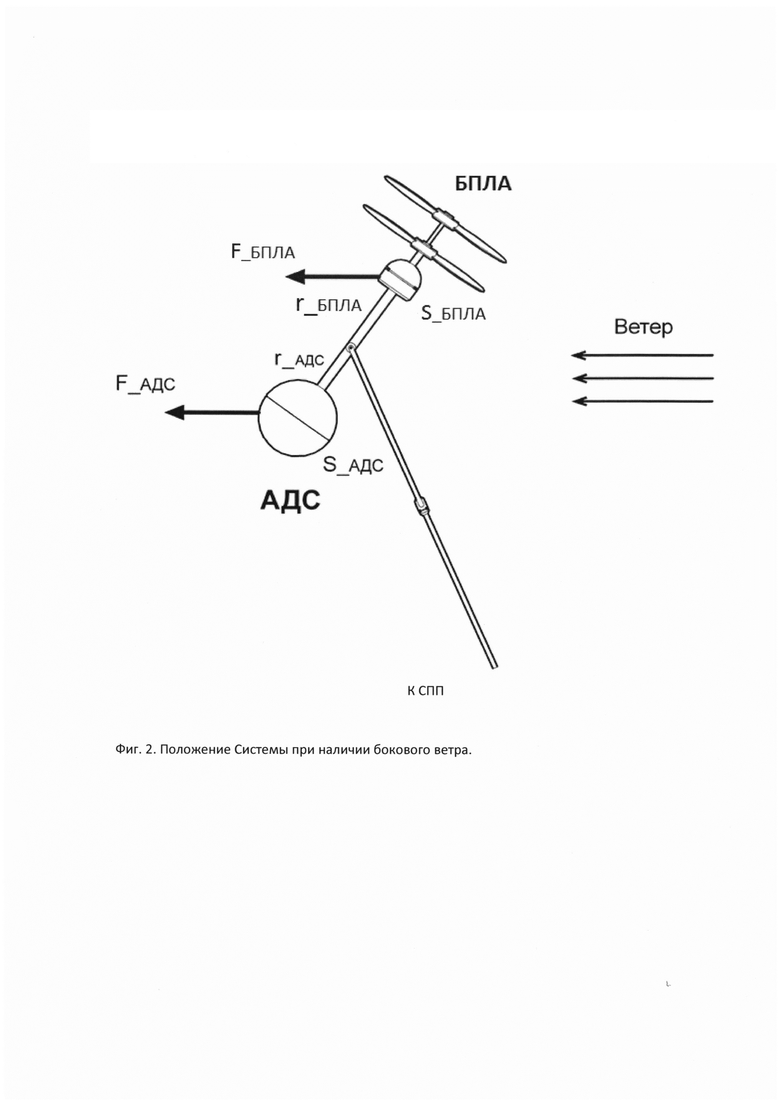
Фиг. 2 - показано положение Системы при наличии бокового ветра
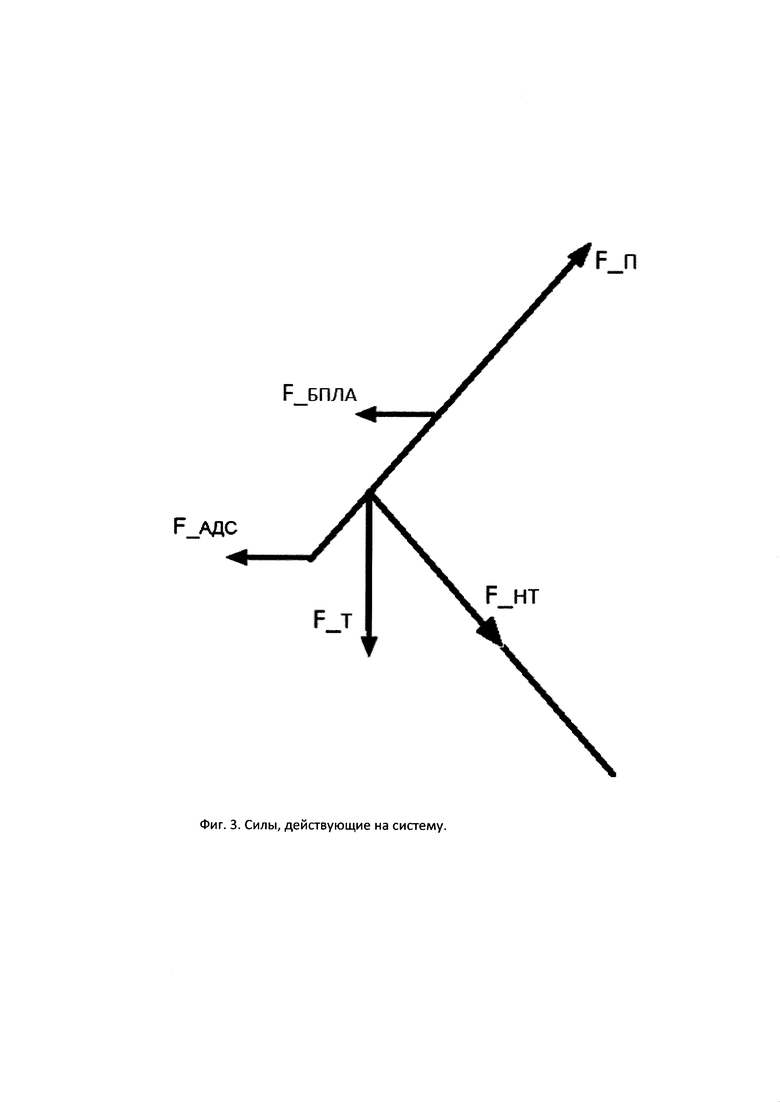
Фиг. 3 - показаны силы, действующие на Систему.
Корпус БПЛА (1), содержащий полезную нагрузку и двигатель (на чертеже не показаны), механически связан с соосными противоположно-направленными винтами (2). При этом корпус БПЛА жестко связан с АДС (3), причем ось жесткой связки (4) сонаправлена с осью вращения соосных винтов. Силовой трос (5), связывающий Систему с СПП, крепится к жесткой связке при помощи кольца (6) крепления силового троса. Кольцо закреплено на жесткой связке в точке крепления (7) посредством шарнирного механизма, обеспечивающего свободное вращение/отклонение кольца 6 относительно оси жесткой связки 4.
Двигатель БПЛА1 при помощи соосных винтов 2 обеспечивает режим БПЛА1, при котором его подъемная сила превышает вес БПЛА1 вместе с силовым тросом и полезной нагрузкой, обеспечивающим его подъем на заданную высоту. Высоту подъема БПЛА1 задают длиной силового троса 5, связывающего БПЛА1 с СПП. Стабилизация БПЛА1 в условиях наличия бокового ветра осуществляется посредством АДС3, управляющего отклонением соосных винтов 5 БПЛА1 относительно вертикали таким образом, что подъемная сила, обеспечиваемая соосными винтами 5, имеет составляющую, направленную против направления ветра. АДС3 обеспечивает вертикальную подъемную силу БПЛА1 с учетом наличия бокового ветра. Точка привязи Системы расположена между БПЛА1 и АДС3
Работает Система следующим образом. В отсутствие бокового ветра, поскольку подъемная сила превышает вес БПЛА1, при подъеме БПЛА1 расположится строго над СПП. При этом высота подъема БПЛА1 определена длиной силового троса 5, а положение БПЛА1 - положением СПП. При возникновении бокового ветра БПЛА1 начнет смещаться по направлению ветра. Сила (F_БПЛА), действующая со стороны ветра на БПЛА1, зависит от формы и площади поверхности БПЛА1. Сила (F_АДС), действующая со стороны ветра на АДС3, также зависит от формы и площади поверхности АДС3. Точка крепления силового троса 5 выбрана так, чтобы выполнялось соотношение:
F_БПЛА*r_БПЛА<F_АДС*r_АДС,
при этом связь БПЛА-АДС будет отклоняться от вертикального положения навстречу ветру (см. Фиг. 2) до положения, пока не уравновесятся силы F_БПЛА и F_АДС с силами натяжения силового троса и подъемной силой БПЛА.
Рассмотрим силы, действующие на Систему (см. Фиг. 3).
Величины сил F_БПЛА и F_АДС зависят от скорости ветра и эффективных площадей сечения БПЛА и АДС, S_БПЛА и S_АДС соответственно. Сила тяжести F_т, действующая на Систему, определяется массой АДС и БПЛА вместе с привязью. Подъемная сила F_п создается соосными винтами, приводимыми в движение двигателем БПЛА. Сила натяжения силового троса F_нт создается избыточным действием подъемной силы F_п. Подъемная сила F_п сонаправлена с осью жесткой связки БПЛА-АДС. При этом отклонение от вертикали связки БПЛА-АДС будет компенсироваться составляющей подъемной силы БПЛА, направленной против ветра.
Таким образом, решена задача упрощения системы стабилизации привязного БПЛА в условиях возможного бокового ветра, облегчения конструкции (обусловленного отсутствием датчиков положения и сложных систем управления, применением двух соосных винтов вместо четырех), следовательно, увеличена полезная нагрузка и обеспечено повышение эффективности работы всей системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ПРИВЯЗНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2009 |
|
RU2441809C2 |
| Аэромобильная система воздушного наблюдения | 2022 |
|
RU2782479C1 |
| Беспилотный привязной авиационный комплекс для внесения пестицидов и агрохимикатов в точном земледелии | 2020 |
|
RU2769411C1 |
| СПОСОБ УПРАВЛЕНИЯ МАРШРУТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2751367C1 |
| Гибридная аэромобильная система воздушного наблюдения | 2023 |
|
RU2827131C1 |
| Пост наблюдения на базе привязного беспилотного летательного аппарата | 2023 |
|
RU2807768C1 |
| СИСТЕМА ВОЗДУШНОГО НАБЛЮДЕНИЯ | 2010 |
|
RU2428355C1 |
| Мобильная беспилотная система для воздушного наблюдения и разведки | 2022 |
|
RU2793711C1 |
| Корабельный динамический аэропричал для мультикоптеров | 2023 |
|
RU2828127C1 |
| Способ подготовки дистанционных боевых действий | 2023 |
|
RU2812501C1 |
Беспилотный привязной авиационный комплекс содержит станцию привязного питания, беспилотный летательный аппарат (БПЛА) с полезной нагрузкой и двигателем, связанным с соосными разнонаправленными винтами, аэродинамический стабилизатор, связанный с БПЛА жесткой связкой, к которой крепится кольцо силового троса, обеспечивающего связь со станцией привязного питания, при этом точка крепления силового троса к БПЛА выбрана так, что смещение БПЛА под воздействием бокового ветра компенсировано отклонением соосного винта в сторону ветра определенным образом. Обеспечивается упрощение системы стабилизации БПЛА и увеличение полезной нагрузки. 3 ил.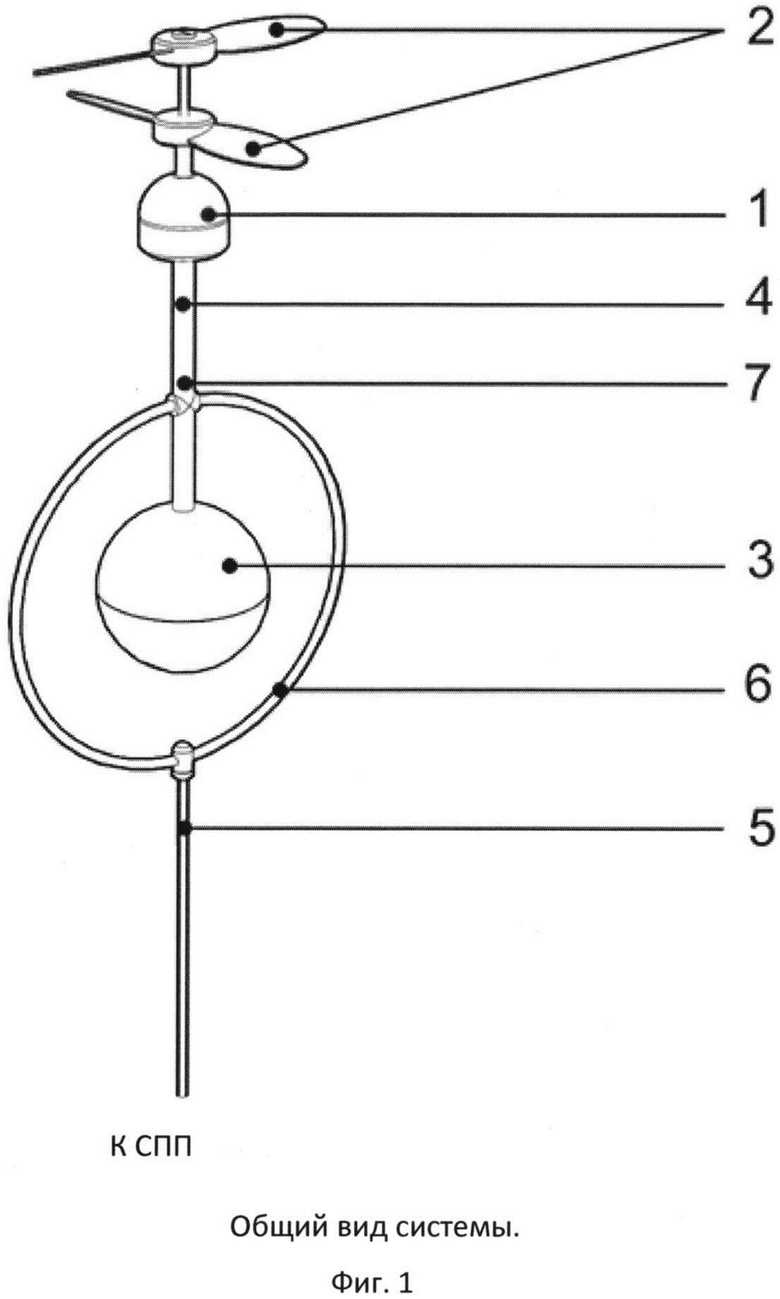
Беспилотный привязной авиационный комплекс, содержащий станцию привязного питания, беспилотный летательный аппарат (БПЛА) с полезной нагрузкой и двигателем, связанным с соосными разнонаправленными винтами, аэродинамический стабилизатор, связанный с БПЛА жесткой сцепкой, к которой крепится кольцо силового троса, обеспечивающего связь со станцией привязного питания, при этом точка крепления силового троса к БПЛА выбрана так, что смещение БПЛА под воздействием бокового ветра компенсировано отклонением соосного винта в сторону ветра, при удовлетворении соотношений:
F_БПЛА*r_БПЛА<F_АДС*r_АДС, где:
F_БПЛА - сила, действующая на БПЛА со стороны ветра;
r_БПЛА - расстояние от центра масс БПЛА до точки крепления силового троса на жесткой связке;
F_АДС - сила, действующая на АДС со стороны ветра;
r_АДС - расстояние от центра масс АДС до точки крепления силового троса на жесткой связке.
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ПРИВЯЗНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2009 |
|
RU2441809C2 |
| US 8602349 B2, 10.12.2013 | |||
| US 8646719 B2, 11.02.2014 | |||
| US 9187173 B2, 17.11.2015 | |||
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2002 |
|
RU2226480C1 |

