Изобретение относится к машиностроению и может быть использовано на различных видах транспорта, а также в механизмах, где необходима плавная регулировка скорости вращения валов.
Известна инерционная передача (авторское свидетельство СССР №1317211, кл. F16Н 25/00, 33/06, 1985), более сложная по конструкция, чем предлагаемая.
Известная бесступенчатая передача Хоббса (Леонов А.И. Инерционные автоматические трансформаторы вращающего момента. М.: Машиностроение, 1978, с. 11, рис. 2) содержит в конструкции механизм свободного хода, недостаточная долговечность которого является недостатком.
Известен центробежно-инерционный вариатор (RU №2287102) более сложный по конструкции, чем предлагаемый.
Наиболее близким техническим решением, выбранным в качестве прототипа, является центробежный вариатор (журнал «Техника молодежи» №12, 1977, с. 39), содержащий ведущий вал, который несет на себе ролики, выдвигающиеся по радиусу. Они обкатываются по внутренней поверхности обоймы, имеющей профиль, близкий к эллипсу. Эта обойма играет роль ведомого звена. При вращении ведущего вала ролики движутся в радиальном направлении от оси вала и, обкатываясь по внутренней поверхности обоймы, создают момент, прокручивающий обойму в сторону вращения вала.
Недостатком данной конструкции является низкий передаваемый момент и кпд вариатора.
Технический результат, достигаемый в изобретении, заключается в увеличении передаваемого момента и повышении кпд вариатора.
Указанный технический результат достигается тем, что в центробежно-инерционном вариаторе, содержащем ведущий вал с роликами, которые имеют возможность взаимодействовать с профилированной поверхностью обоймы, выполняющей роль ведомого звена, профилированную поверхность обоймы, выполняющую роль ведомого звена, состоящую из участков уменьшающих и сопряженных с ними участков, увеличивающих радиус вращения роликов, а область между обоймой и ведущим валом полностью или частично заполняется рабочей жидкостью. При этом увеличивается передаваемый момент и кпд вариатора.
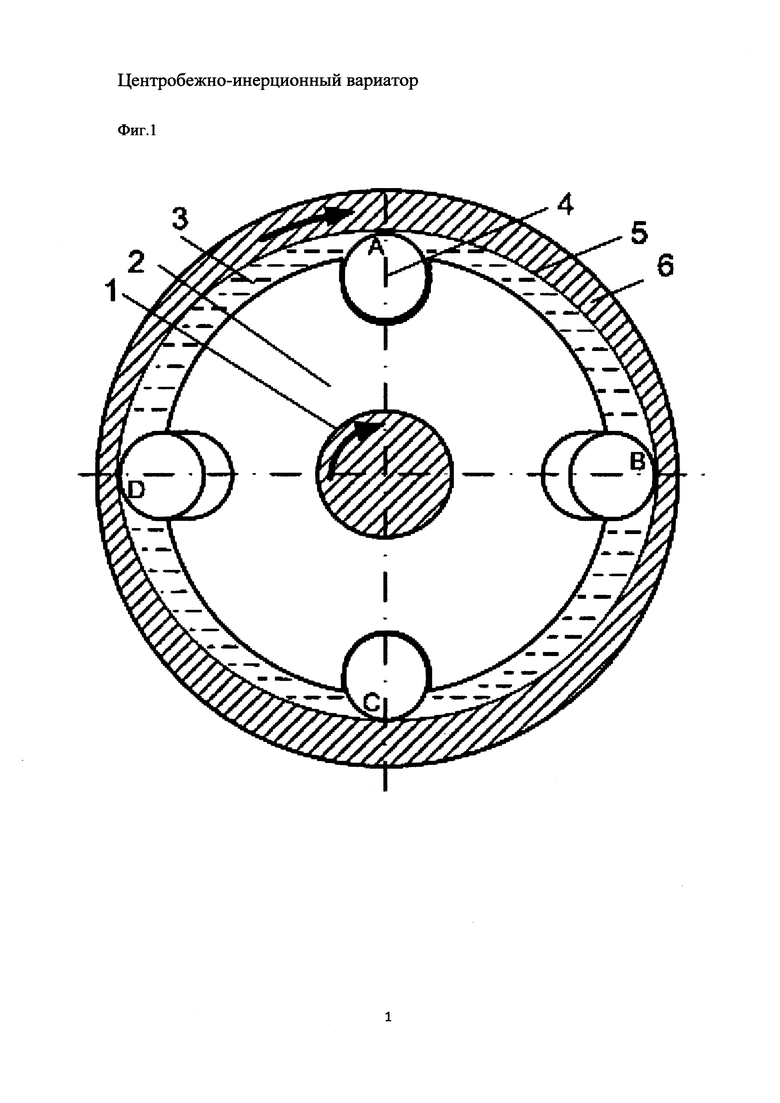
На чертеже Фиг. 1 представлен поперечный разрез центробежно-инерционного вариатора по первому независимому пункту формулы.
Центробежно-инерционный вариатор содержит ведущий вал 1, на ступице 2 которого установлены ролики 4, имеющие возможность взаимодействовать с профилированной поверхностью 5 обоймы 6 и рабочую жидкость 3.
Вариатор работает следующим образом.
Ведущий вал 1 начинает вращаться. Ролики 4 под действием центробежных сил выдвигаются от центра вариатора и начинают обкатывать одновременно все участки профилированной поверхности 5 ведомой обоймы 6. Кроме того, ролики толкают перед собой часть рабочей жидкости 3.
Действие на ведомую обойму равно сумме действий от роликов и от рабочей жидкости.
Под действием центробежной силы на участках (А-В, C-D), где радиус вращения массы роликов 4 и части рабочей жидкости 3 уменьшается, создается движущий момент Мд.
Мд=Fц.ср1×sina1×rcp1,
где Fц.ср1 - центробежная сила от массы роликов 4 и части рабочей жидкости 3 на участках (А-В, C-D);
a1 - среднее значение угла наклона траектории движения центра массы роликов 4 к окружностям, проходящим через центры масс роликов 4 на участках (А-В, C-D);
rcp1 - среднее значение радиуса движения центра массы роликов 4 на участках (А-В, C-D).
А на участках (В-С, D-A), где радиус вращения массы роликов 4 и части рабочей жидкости 3 увеличивается, возникает тормозящий момент МТ, увеличивающийся при уменьшении разности скоростей вращения ведущего вала 1 и ведомой обоймы 6. При скорости обоймы 6, близкой к скорости ведущего вала 1, тормозящий момент достигает максимальной величины
MT=Fц.cp2×sina2×rcp2,
где Fц.cp2 - центробежная сила от массы роликов 4 и части рабочей жидкости 3 на участках (В-С, D-A);
а2 - среднее значение угла наклона траектории движения центра массы роликов 4 и рабочей жидкости 3 к окружностям, проходящим через центры масс роликов 4 и части рабочей жидкости 3 на участках (В-С, D-A);
rср2 - среднее значение радиуса движения центра массы роликов 4 и части рабочей жидкости 3 на участках (В-С, D-A).
Так как Fц.ср1 и rcp1, примерно равны соответственно Fц.ср2 и rср2, то синхронизирующий момент от давления роликов Mср
Mср=Mдр-Mтр,
будет постоянно меняться в зависимости от положения роликов, так как воздействие происходит только в области соприкосновения роликов и обоймы.
Значение синхронизирующего момента от давления роликов будет изменяться во времени от положительного значения Mдр до отрицательного значения Mтр и зависеть от значений sina1 и sina2.
Синхронизирующий момент от давления части рабочей жидкости Mсж
Mсж=Mдж-Mтж,
будет постоянен, так как рабочая жидкость действует на всю внутреннюю поверхность обоймы одновременно.
Тогда общий синхронизирующий момент равен их сумме
Mс=Mсс+Mсж,
и зависит от значений sina1 и sina2.
Если длина участков (В-С, D-A) равна длине участков (А-В, C-D), sina1 равен sina2 и общий синхронизирующий момент равен 0.
Если длина участков (В-С, D-A) больше длины участков (А-В, C-D), sina1 больше sina2 и общий синхронизирующий момент положителен.
Если длина участков (В-С, D-A) больше длины участков (А-В, C-D), sina1 меньше sina2 и общий синхронизирующий момент отрицателен.
При движении роликов 4 по участкам (В-С, D-A) радиус вращения центра массы роликов 4 увеличивается, а линейная скорость роликов 4 возрастает от Vp min до Vp max и от ведущего вала 1 отнимается работа, равная изменению кинетической энергии роликов 4 и части рабочей жидкости 3 на этих участках. При движении роликов 4 по участкам (А-В, C-D), где радиус вращения центра массы роликов 4 уменьшается, одновременно уменьшается линейная скорость движения роликов 4 и части рабочей жидкости 3 от Vp max до Vp min, т.е. скорость движения тормозится профилированной поверхностью 5 обоймы 6 и ведущим валом 1.
Таким образом, при неподвижной обойме 6 кинетическая энергия, полученная роликами 4 и части рабочей жидкости 3 на участках разгона, возвращается ведущему валу 1, кроме потерь на трение в подшипниках роликов и подвесов и трения роликов 4 при качении. Во время торможения роликов 4 ведомой обойме 6 передается импульс силы
Fи×dt=mx\dV,
где Fи=Fир+Fиж;
Fир - сила инерции роликов 4;
Fир - сила инерции части рабочей жидкости 3;
dt - время изменения скорости роликов 4 от Vp max до Vp min;
m=mи+mж - масса роликов 4 и части рабочей жидкости 3;
dV - разность скоростей роликов Vp max-Vp min.
Под действием силы инерции Fи на обойме 6 развивается движущий момент инерции Mи
Mи=Mир+Mиж,
Mир=Fир×rcp,
где Rср - среднее значение радиуса движения центра массы роликов 4 на участках (А-В, C-D).
Mиж=Fиж×Rсж,
где Rсж - среднее значение радиуса движения центра массы части рабочей жидкости 3 на участках (А-В, C-D).
При работе вариатора в режиме трансформации момента общий движущий момент Ми равен сумме моментов
Mи=Mир+Mиж.
Таким образом движущий момент Mи будет больше, по сравнению с прототипом на величину Mиж движущего момента от части рабочей жидкости.
Общий момент М равен сумме моментов
M=Mи+Mс.
В частном случае применения вариатора для передачи вращательного движения только в одном направлении, за счет увеличения участков (В-С, D-A) по сравнению (А-В, C-D), у соответственного увеличения sina1 по сравнению sina2 и можно увеличить общий синхронизирующий момент, а значит повысить кпд вариатора.
Когда момент сопротивления нагрузки на ведомой обойме 6 становится меньше общего движущего момента Ми (Ми>Мн), создаваемого роликами 4 части рабочей жидкости 3 и на профилированной поверхности 5, ведомая обойма 6 начинает вращаться под действием разности этих моментов.
По мере увеличения частоты вращения ведомой обоймы 6 (W2) уменьшается частота колебаний роликов 4, пропорциональная разности частот вращения ведущего вала 1 (W1) и ведомой обоймы 6 (W2)
dW=W1-W2,
а часть кинетической энергии роликов 4 передается ведомой обойме 6 и момент сопротивления на ведущем валу 1 возрастает, что вызывает уменьшение общего движущего момента Ми (W2). Когда момент сопротивления нагрузки на ведомой обойме 6 Мн достигает момента Ми или станет меньше его происходит синхронизация вращения ведомой обоймы 6 с ведущим валом 1. Теперь вариатор работает как упруго центробежная муфта.
Таким образом, скорость вращения обоймы 6 может меняться от нулевой до скорости ведущего вала 1, в зависимости от ее нагрузки.
При этом увеличивается передаваемый момент и повышается кпд вариатора.
Для уменьшения потерь от трения роликов и повышения кпд вариатора в качестве рабочей жидкости или ее части используется жидкость с хорошими смазочными свойствами, например масло.
Для уменьшения больших знакопеременного моментов на ведущем валу и ведомой обойме, вызванных постоянно изменяющимся синхронизирующим моментом от давления роликов, предлагается конструкция вариатора с выдвигающими пластинами, вместо роликов.
Технический результат, достигаемый в заявленном изобретении по второму независимому пункту формулы, заключается в увеличении надежности и долговечности вариатора.
Указанный технический результат достигается тем, что в центробежно-инерционном вариаторе, содержащем ведущий вал, обойму, выполняющую роль ведомого звена, профилированную поверхность обоймы, рабочую жидкость, полностью или частично заполняющую область между обоймой и ведущим валом, а вал содержит пластины, выдвигающиеся из ведущего вала в радиальном направлении, имущие возможность взаимодействовать с профилированной поверхностью обоймы, состоящей из участков уменьшающих и сопряженных с ними участков, увеличивающих радиус вращения центра масс пластин. При этом увеличивается надежность и долговечность вариатора.
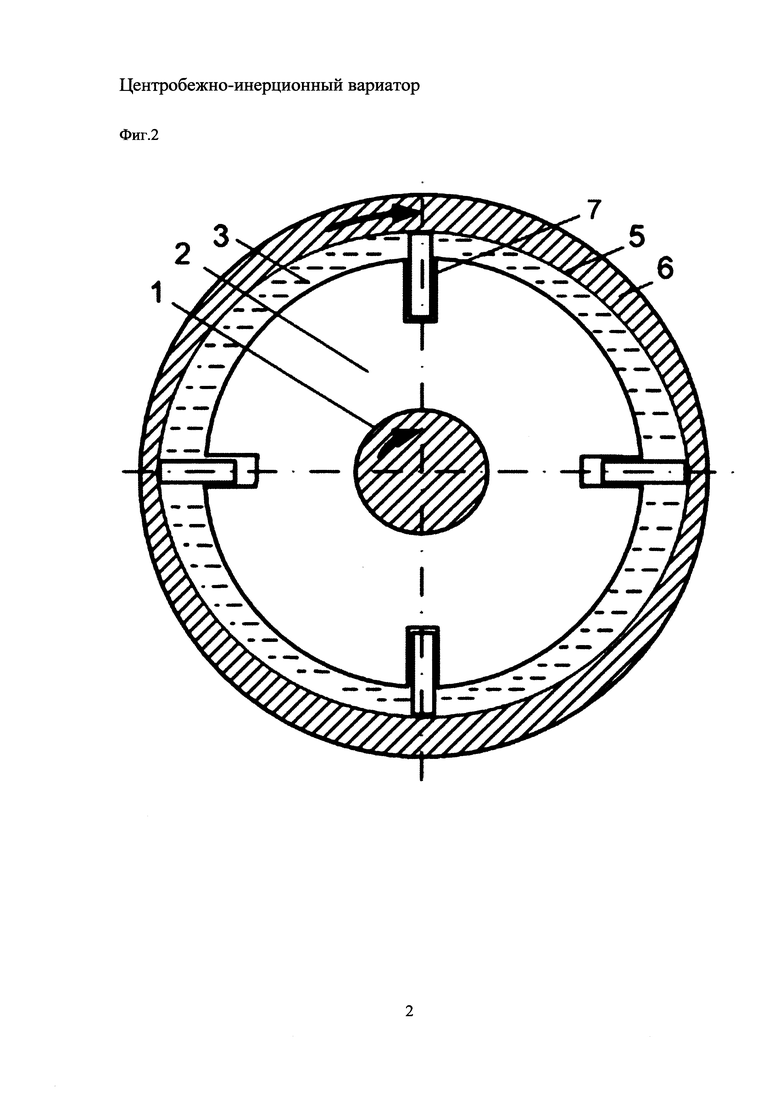
На чертеже Фиг. 2 представлен поперечный разрез центробежно-инерционного вариатора по второму независимому пункту формулы.
Центробежно-инерционный вариатор содержит ведущий вал 1, на ступице 2 которого установлены пластины 7, которые имеют возможность взаимодействовать с профилированной поверхностью 5 обоймы 6 и рабочую жидкость 3.
Вариатор работает следующим образом.
Ведущий вал 1 начинает вращаться. Пластины 7 под действием центробежных сил выдвигаются от центра вариатора и начинают скользить по профилированной поверхности 5 ведомой обоймы 6. Кроме того пластины толкают перед собой часть рабочей жидкости 3.
Таким образом, работа вариатора похожа на работу вариатора описанного выше.
Однако объем части рабочей жидкости толкающей перед собой пластиной будет больше, чем ролика такого же объема как пластина, соответственно будет больше масса этой части жидкости и синхронизирующий момент от давления рабочей жидкости Мсж.
Так общий синхронизирующий момент равен сумме синхронизирующего момента от давления рабочей жидкости Мсж и синхронизирующего момента от давления пластин, при одинаковым значении общего синхронизирующего момента, по сравнению с вариатором описанном выше, значение синхронизирующего момента от давления жидкости будет больше, а значение синхронизирующего момента от давления пластин будет меньше, чем от роликов, а значит и уменьшиться величина знакопеременного моментов на ведущем валу и ведомой обойме, что увеличит надежность и долговечность предлагаемого вариатора.
Также для уменьшения величины знакопеременного моментов на ведущем валу и ведомой обойме, и увеличения надежности и долговечности вариатора по всем описанным изобретениям предлагается добавить в рабочую жидкость наполнитель, увеличивающий массу рабочей жидкости, например графитный порошок.
Для уменьшения потерь от трения роликов и пластин и повышения кпд вариатора предлагается нанести на их поверхности и на поверхности, с которыми они контактируют, износостойкое антифрикционное покрытие, например керамический сплав бора, алюминия и магния (AlMgB14).
Для снятия нагрузки с подшипников ведущего вала 1 и обоймы 6 необходимо устанавливать не менее двух одноучастковых вариаторов со сдвигом по фазе в окружном направлении на 180°.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦЕНТРОБЕЖНО-ИНЕРЦИОННЫЙ ВАРИАТОР | 2005 |
|
RU2287102C1 |
| АВТОМАТИЧЕСКИЙ ЦЕНТРОБЕЖНО-ИНЕРЦИОННЫЙ ВАРИАТОР | 2008 |
|
RU2403469C2 |
| АВТОМАТИЧЕСКАЯ СИЛОВАЯ ПЕРЕДАЧА | 2014 |
|
RU2558414C2 |
| Силовая передача | 1986 |
|
SU1391976A1 |
| ИНЕРЦИОННЫЙ ИМПУЛЬСНЫЙ ВАРИАТОР | 1991 |
|
RU2016293C1 |
| ЦЕНТРОБЕЖНЫЙ ВАРИАТОР | 2004 |
|
RU2281424C1 |
| ГИДРАВЛИКО-ИНЕРЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ, СИСТЕМА УПРАВЛЕНИЯ ИМ, КОРОБКА ПЕРЕМЕНЫ ПЕРЕДАЧ И СПОСОБ ПРЕОБРАЗОВАНИЯ ИМИ КРУТЯЩЕГО МОМЕНТА | 2003 |
|
RU2259282C2 |
| "Инерционный привод | 1976 |
|
SU605051A1 |
| ВАРИАТОР | 1990 |
|
RU2117837C1 |
| Импульсный механизм | 1984 |
|
SU1328621A1 |
Изобретение относится к машиностроению, где необходима плавная регулировка скорости вращения валов. Центробежно-инерционный вариатор содержит ведущий вал (1), на ступице (2) которого установлены ролики (4) или пластины (7), имеющие возможность взаимодействовать с профилированной поверхностью (5) обоймы (6) и рабочую жидкость (3). Достигается повышение кпд вариатора. 2 н. и 3 з.п. ф-лы, 2 ил.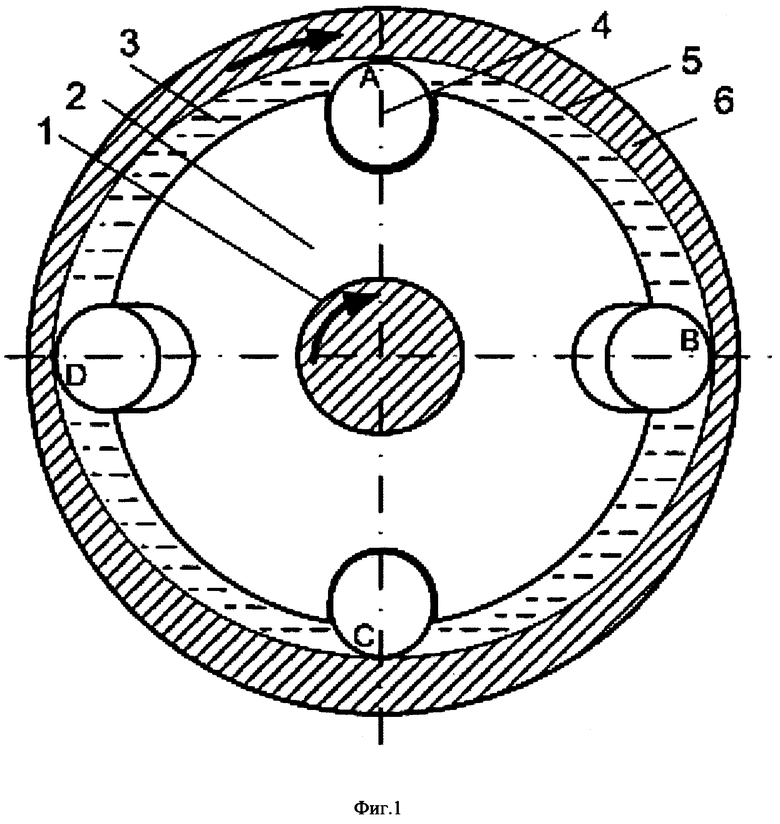
1. Центробежно-инерционный вариатор, содержащий ведущий вал с роликами, которые имеют возможность взаимодействовать с профилированной поверхностью обоймы, выполняющей роль ведомого звена, профилированную поверхность обоймы, выполняющую роль ведомого звена, состоящую из участков уменьшающих и сопряженных с ними участков, увеличивающих радиус вращения роликов, отличающийся тем, что область между обоймой и ведущим валом полностью или частично заполняется рабочей жидкостью.
2. Центробежно-инерционный вариатор, содержащий ведущий вал, обойму, выполняющую роль ведомого звена, профилированную поверхность обоймы, рабочую жидкость, полностью или частично заполняющую область между обоймой и ведущим валом, отличающийся тем, что вал содержит пластины, выдвигающиеся из ведущего вала в радиальном направлении, имеющие возможность взаимодействовать с профилированной поверхностью обоймы, состоящей из участков уменьшающих и сопряженных с ними участков, увеличивающих радиус вращения центра масс пластин.
3. Центробежно-инерционный вариатор по пп. 1 и 2, отличающийся тем, что в качестве рабочей жидкости, или ее части, используется жидкость с хорошими смазочными свойствами.
4. Центробежно-инерционный вариатор по пп.1-3, отличающийся тем, что в рабочую жидкость добавляется наполнитель, увеличивающий массу рабочей жидкости.
5. Центробежно-инерционный вариатор по пп. 1-4, отличающийся тем, что на поверхности роликов и на поверхности, с которыми они контактируют, нанесено износостойкое антифрикционное покрытие.
| ЦЕНТРОБЕЖНО-ИНЕРЦИОННЫЙ ВАРИАТОР | 2005 |
|
RU2287102C1 |
| Инерционно-импульсная передача "дончанка | 1982 |
|
SU1064067A1 |
| Инерционно-импульсная передача | 1986 |
|
SU1511498A1 |
| Фотоэлектрический коррелятор | 1983 |
|
SU1238116A1 |

