Изобретения относятся к радиолокации и могут быть использованы для обнаружения сигналов в системах цифровой обработки. В частности, для обнаружения сигналов после их аналого-цифрового преобразования и обработки, включающей согласованную фильтрацию и подавление помех.
Известен способ обнаружения сигналов (Я.Д.Ширман, В.Н.Манжос «Теория и техника обработки радиолокационной информации на фоне помех», М.: Радио и связь, 1981, с.61, 149), заключающийся в том, что формируют квадратурные составляющие принятых радиолокатором сигналов, дискретизируют их по дальности с частотой Найквиста, пропускают через согласованный фильтр, вычисляют модуль квадратурных составляющих на выходе согласованного фильтра и сравнивают с порогом. В случае превышения порога в каком-либо из элементов дальности принимают решение об обнаружении сигнала в этом элементе дальности.
Основной недостаток этого способа состоит в больших потерях обнаружения сигналов, время поступления которых не совпадает с моментами дискретизации, из-за уменьшения величины пика амплитуды сигнала на выходе согласованного фильтра.
Наиболее близким техническим решением является способ обнаружения сигналов, описанный в («Применение цифровой обработки сигналов» // под ред. Э.Оппенгейма, М.: Мир, 1978, с.323-3 26). В данном способе формируют квадратурные составляющие принятых радиолокатором сигналов, дискретизируют их по дальности с частотой Найквиста, пропускают через согласованный фильтр с весовой обработкой, вычисляют модуль квадратурных составляющих сигнала на выходе согласованного фильтра, находят временное положение пика амплитуды сигнала  на выходе согласованного фильтра относительно временного положения k-го элемента дальности, где k=2, …, N-1, N - число элементов дальности, по формуле
на выходе согласованного фильтра относительно временного положения k-го элемента дальности, где k=2, …, N-1, N - число элементов дальности, по формуле

где xk-1, xk, xk+1 - значения модуля квадратурных составляющих на выходе согласованного фильтра, соответственно, в k-1, k, k+1 элементах дальности, проверяют условие  если оно выполняется, то определяют величину пика амплитуды сигнала
если оно выполняется, то определяют величину пика амплитуды сигнала  на выходе согласованного фильтра по формуле
на выходе согласованного фильтра по формуле

сравнивают величину пика амплитуды сигнала  с порогом обнаружения С, выбираемым так, чтобы обеспечить заданное значение вероятности ложных тревог, если
с порогом обнаружения С, выбираемым так, чтобы обеспечить заданное значение вероятности ложных тревог, если  то принимают решение об обнаружении сигнала в k-ом элементе дальности.
то принимают решение об обнаружении сигнала в k-ом элементе дальности.
В прототипе учитывается то, что за счет весовой обработки в согласованном фильтре, снижающей уровень боковых лепестков (УБЛ), происходит также расширение основного лепестка сжатого сигнала, так что на указанный основной лепесток приходится не менее 3-х отсчетов при дискретизации с частотой Найквиста. Это делает возможным осуществление 3-х точечной параболической интерполяции амплитуды сигнала. В частности, по значениям амплитуд сигнала (xk-1, xk, xk+1) в 3-х соседних элементах дальности можно, используя формулы (1), (2), найти величину пика амплитуды сигнала  на выходе согласованного фильтра. При этом происходит снижение потерь обнаружения сигналов, время поступления которых не совпадает с моментами дискретизации.
на выходе согласованного фильтра. При этом происходит снижение потерь обнаружения сигналов, время поступления которых не совпадает с моментами дискретизации.
Вместе с тем при совпадении или незначительной разности между временем поступления сигнала и моментами дискретизации возникают ошибки интерполяции величины пика амплитуды сигнала на выходе согласованного фильтра. Это приводит к росту потерь обнаружения сигнала. Кроме того, в радиолокаторах весовую обработку в согласованном фильтре нередко приходится отключать, поскольку она вносит определенные потери, что может быть важно, например, при обнаружении цели на максимальных дальностях. При отсутствии весовой обработки и дискретизации с частотой Найквиста на основной лепесток сжатого сигнала приходится только 2 отсчета. В этом случае использование прототипа приводит к большим ошибкам интерполяции величины пика амплитуды сигнала на выходе согласованного фильтра и за счет этого увеличению потерь обнаружения. Таким образом, недостаток наиболее близкого известного способа обнаружения сигналов состоит в увеличении за счет ошибок интерполяции величины пика амплитуды сигнала на выходе согласованного фильтра, потерь обнаружения сигнала в условиях совпадения или незначительной разности между временем поступления сигнала и моментами дискретизации, а также при отключении весовой обработки в согласованном фильтре.
Техническим результатом (решаемой задачей) изобретения по варианту 1 является снижение потерь обнаружения сигнала, возникающих за счет ошибок интерполяции величины пика амплитуды сигнала при совпадении или незначительной разности между временем поступления сигнала и моментами дискретизации.
Технический результат (решаемая задача) в предлагаемом способе по варианту 1 достигается тем, что в известном способе обнаружения сигналов, в котором формируют квадратурные составляющие принятых радиолокатором сигналов, дискретизируют их по дальности с частотой Найквиста, пропускают через согласованный фильтр с весовой обработкой, вычисляют модуль квадратурных составляющих на выходе согласованного фильтра, оценивают временное положение пика амплитуды сигнала  на выходе согласованного фильтра относительно временного положения k-го элемента дальности, где k=2, …, N-1, N - число элементов дальности, по формуле (1), проверяют условие
на выходе согласованного фильтра относительно временного положения k-го элемента дальности, где k=2, …, N-1, N - число элементов дальности, по формуле (1), проверяют условие  при выполнении указанного условия определяют величину пика амплитуды сигнала
при выполнении указанного условия определяют величину пика амплитуды сигнала  на выходе согласованного фильтра по формуле (2), сравнивают величину пика амплитуды сигнала
на выходе согласованного фильтра по формуле (2), сравнивают величину пика амплитуды сигнала  с порогом обнаружения C, выбираемым из условия обеспечения заданного значения вероятности ложных тревог, принимают решение об обнаружении сигнала в k-ом элементе дальности, если согласно изобретению после оценивания временного положения пика амплитуды сигнала на выходе согласованного фильтра относительно временного положения k-го элемента дальности по приведенной формуле сравнивают модуль оценки временного положения пика амплитуды сигнала
с порогом обнаружения C, выбираемым из условия обеспечения заданного значения вероятности ложных тревог, принимают решение об обнаружении сигнала в k-ом элементе дальности, если согласно изобретению после оценивания временного положения пика амплитуды сигнала на выходе согласованного фильтра относительно временного положения k-го элемента дальности по приведенной формуле сравнивают модуль оценки временного положения пика амплитуды сигнала  с пороговым коэффициентом Т, определяемым допустимой величиной потерь обнаружения при совпадении времени поступления принятого радиолокатором сигнала с моментами дискретизации, если выполняется условие
с пороговым коэффициентом Т, определяемым допустимой величиной потерь обнаружения при совпадении времени поступления принятого радиолокатором сигнала с моментами дискретизации, если выполняется условие  то определяют величину пика амплитуды сигнала на выходе согласованного фильтра по приведенной формуле, если упомянутое условие не выполняется, то есть
то определяют величину пика амплитуды сигнала на выходе согласованного фильтра по приведенной формуле, если упомянутое условие не выполняется, то есть  то величину пика амплитуды сигнала на выходе согласованного фильтра считают равной xk, принимают решение о наличии сигнала в k-ом элементе дальности, при этом упомянутый порог обнаружения С делают переменным, зависящим от того, каким образом была определена величина пика амплитуды сигнала
то величину пика амплитуды сигнала на выходе согласованного фильтра считают равной xk, принимают решение о наличии сигнала в k-ом элементе дальности, при этом упомянутый порог обнаружения С делают переменным, зависящим от того, каким образом была определена величина пика амплитуды сигнала 
Новыми существенными признаками предлагаемого способа по варианту 1 являются следующие:
- сравнение модуля оценки временного положения пика амплитуды сигнала на выходе согласованного фильтра с пороговым коэффициентом T, определяемым допустимой величиной потерь обнаружения при совпадении времени поступления сигнала с моментами дискретизации;
- определение величины пика амплитуды сигнала на выходе согласованного фильтра по формуле (2) при выполнении условия  если данное условие не выполняется, то величину пика амплитуды сигнала на выходе согласованного фильтра считают равной xk;
если данное условие не выполняется, то величину пика амплитуды сигнала на выходе согласованного фильтра считают равной xk;
- порог обнаружения С делается переменным, зависящим от того, каким образом была определена величина пика амплитуды сигнала
Применение всех новых признаков совместно с признаками прототипа позволит получить снижение потерь обнаружения сигнала за счет ошибок интерполяции величины пика амплитуды сигнала на выходе согласованного фильтра при совпадении или незначительной разности между временем поступления сигнала и моментами дискретизации, поскольку при  интерполяция не производится.
интерполяция не производится.
Техническим результатом (решаемой задачей) изобретения по варианту 2 является снижение потерь обнаружения сигнала, возникающих за счет ошибок интерполяции величины пика амплитуды сигнала при отключении весовой обработки в согласованном фильтре.
Технический результат (решаемая задача) в предлагаемом способе по варианту 2 достигается тем, что в известном способе обнаружения сигналов, в котором формируют квадратурные составляющие принятых радиолокатором сигналов, дискретизируют их по дальности с частотой Найквиста, пропускают через согласованный фильтр с весовой обработкой, вычисляют модуль квадратурных составляющих на выходе согласованного фильтра, оценивают временное положение пика амплитуды сигнала  на выходе согласованного фильтра относительно временного положения k-то элемента дальности, где k=2, …, N-1, N - число элементов дальности, по формуле (1), проверяют условие
на выходе согласованного фильтра относительно временного положения k-то элемента дальности, где k=2, …, N-1, N - число элементов дальности, по формуле (1), проверяют условие  при выполнении указанного условия определяют величину пика амплитуды сигнала на выходе согласованного фильтра по формуле (2), сравнивают величину пика амплитуды сигнала с порогом обнаружения С, выбираемым из условия обеспечения заданного значения вероятности ложных тревог, принимают решение об обнаружении сигнала в k-ом элементе дальности, если
при выполнении указанного условия определяют величину пика амплитуды сигнала на выходе согласованного фильтра по формуле (2), сравнивают величину пика амплитуды сигнала с порогом обнаружения С, выбираемым из условия обеспечения заданного значения вероятности ложных тревог, принимают решение об обнаружении сигнала в k-ом элементе дальности, если  согласно изобретению при отключении весовой обработки в согласованном фильтре после вычисления модуля квадратурных составляющих на выходе согласованного фильтра производят оценку временного положения пика амплитуды сигнала
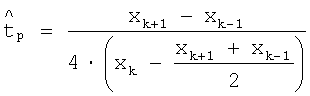
согласно изобретению при отключении весовой обработки в согласованном фильтре после вычисления модуля квадратурных составляющих на выходе согласованного фильтра производят оценку временного положения пика амплитуды сигнала  на выходе согласованного фильтра по следующей формуле:
на выходе согласованного фильтра по следующей формуле:

модуль оценки временного положения пика амплитуды сигнала на выходе согласованного фильтра сравнивают с пороговыми коэффициентами T1, T2, определяемыми допустимой величиной потерь обнаружения при совпадении времени поступления принятого радиолокатором сигнала с моментами дискретизации, при выполнении условия  определяют величину пика амплитуды сигнала на выходе согласованного фильтра по следующей формуле:
определяют величину пика амплитуды сигнала на выходе согласованного фильтра по следующей формуле:

если упомянутое выше условие не выполняется, то есть
 то величину пика амплитуды сигнала считают равной xk, принимают решение о наличии сигнала в k-ом элементе дальности, для чего упомянутый порог обнаружения C делают переменным, зависящим от того, каким образом была определена величина пика амплитуды сигнала
то величину пика амплитуды сигнала считают равной xk, принимают решение о наличии сигнала в k-ом элементе дальности, для чего упомянутый порог обнаружения C делают переменным, зависящим от того, каким образом была определена величина пика амплитуды сигнала 
Новыми существенными признаками предлагаемого способа по варианту 2 являются следующие:
- при отключении весовой обработки в согласованном фильтре:
- оценка временного положения пика амплитуды сигнала на выходе согласованного фильтра делается по формуле (3);
- модуль оценки временного положения пика амплитуды сигнала на выходе согласованного фильтра сравнивается с пороговыми коэффициентами T1, T2, определяемыми допустимой величиной потерь обнаружения при совпадении времени поступления сигнала с моментами дискретизации;
- величина пика амплитуды сигнала на выходе согласованного фильтра определяется по формуле (4) при выполнении условия  если данное условие не выполняется, то величину пика амплитуды сигнала на выходе согласованного фильтра считают равной xk;
если данное условие не выполняется, то величину пика амплитуды сигнала на выходе согласованного фильтра считают равной xk;
- порог обнаружения C делается переменным, зависящим от того, каким образом была определена величина пика амплитуды сигнала
Применение всех новых признаков совместно с признаками прототипа позволит получить снижение потерь обнаружения сигнала за счет ошибок интерполяции величины пика амплитуды сигнала на выходе согласованного фильтра при отключении весовой обработки в согласованном фильтре, поскольку в данном случае определение величины пика амплитуды сигнала по формуле (4) при выполнении условия  дает меньшую величину ошибок интерполяции величины пика амплитуды сигнала. Если условие
дает меньшую величину ошибок интерполяции величины пика амплитуды сигнала. Если условие  не выполняется, то интерполяция величины пика амплитуды сигнала не производится, что приводит к снижению потерь обнаружения сигнала в ситуации, когда весовая обработка отключена, а время поступления сигнала совпадает с моментами дискретизации или незначительно от них отличается.
не выполняется, то интерполяция величины пика амплитуды сигнала не производится, что приводит к снижению потерь обнаружения сигнала в ситуации, когда весовая обработка отключена, а время поступления сигнала совпадает с моментами дискретизации или незначительно от них отличается.
Изобретения поясняются чертежами:
- Фиг.1. Структурная схема устройства, реализующего предлагаемый способ обнаружения сигналов по варианту 1.
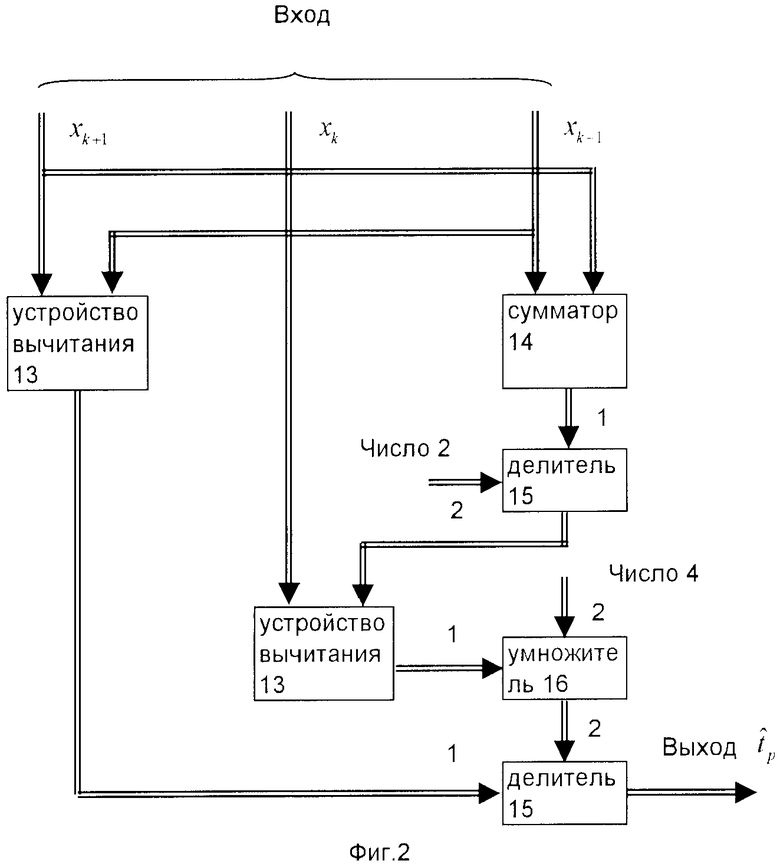
- Фиг.2. Структурная схема блока оценки положения пика амплитуды сигнала при наличии ВО в согласованном фильтре.
- Фиг.3. Структурная схема блока определения величины пика амплитуды сигнала.
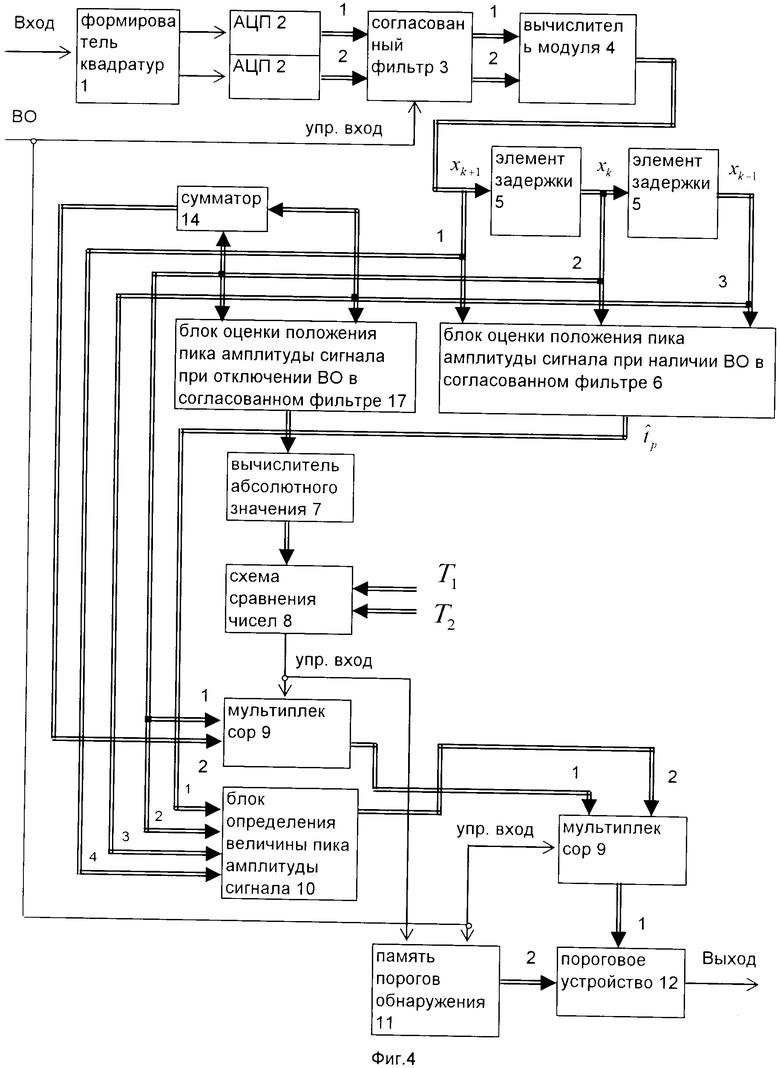
- Фиг.4. Структурная схема устройства, реализующего предлагаемый способ обнаружения сигналов по варианту 2.
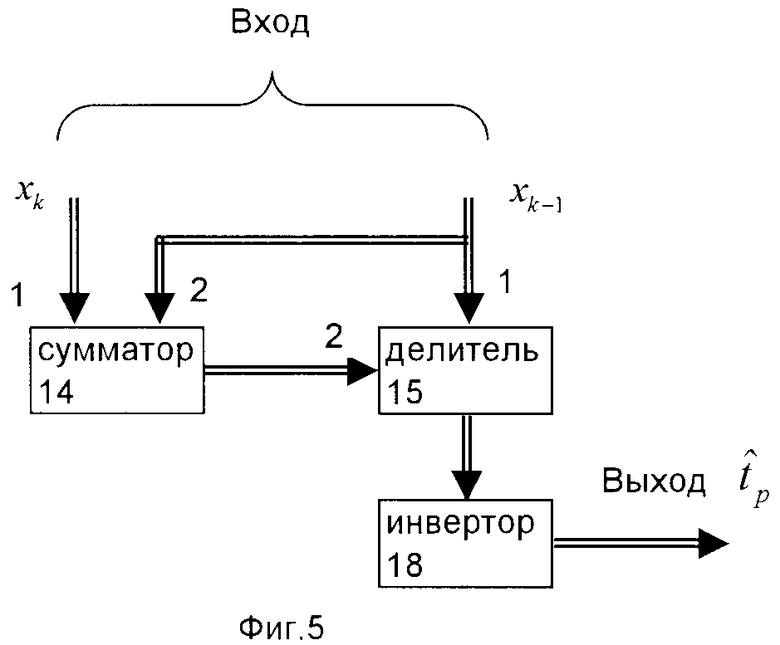
- Фиг.5. Структурная схема блока оценки положения пика амплитуды сигнала при отключении ВО в согласованном фильтре.
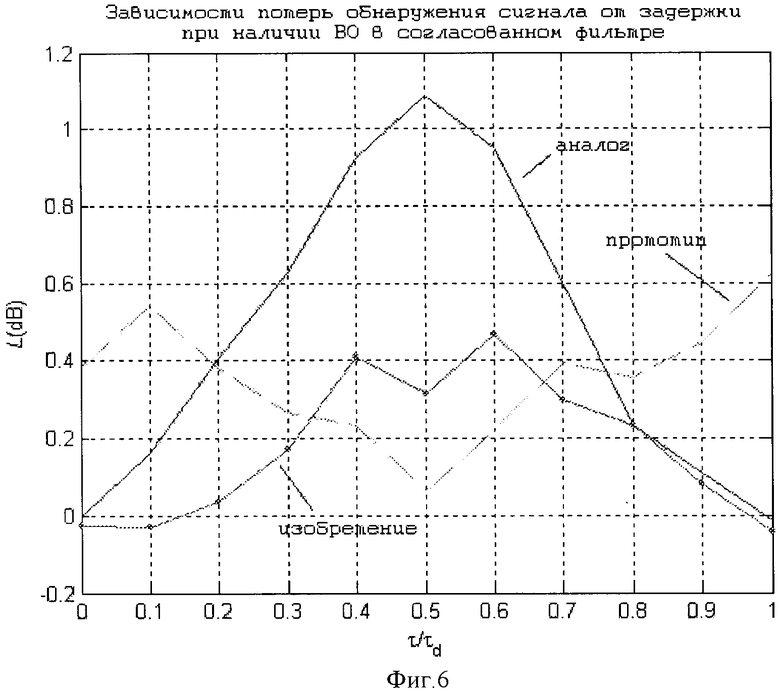
- Фиг.6. Зависимости потерь обнаружения от задержки сигнала при наличии ВО в согласованном фильтре.
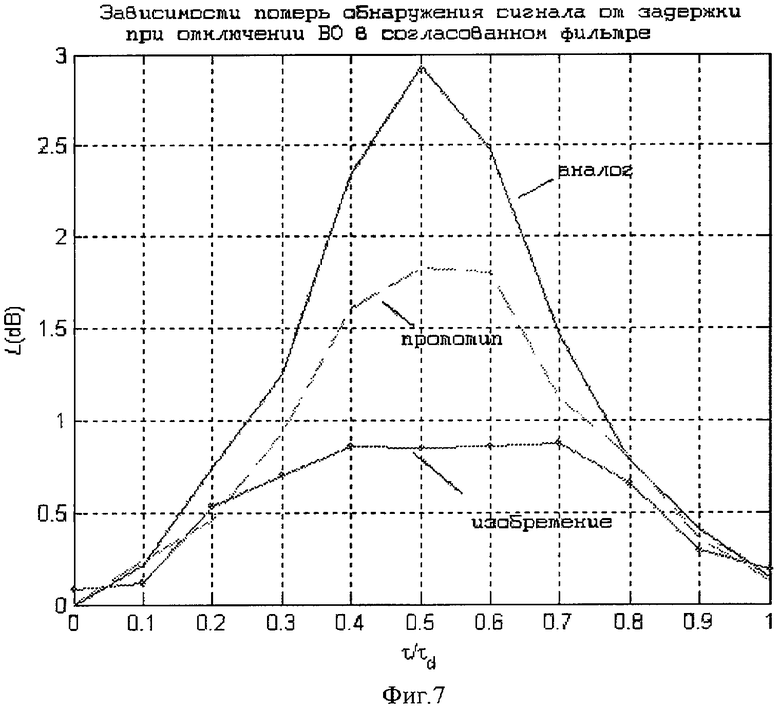
- Фиг.7. Зависимости потерь обнаружения от задержки сигнала при отключении ВО в согласованном фильтре.
На чертежах обозначено: ВО - весовая обработка; двойные линии - многоразрядные шины.
Техническая реализация предлагаемого способа обнаружения сигналов по варианту 1 возможна на основе устройства, показанного на Фиг.1, Фиг.2, Фиг.3. Устройство на Фиг.1 содержит формирователь квадратур 1, вход которого является входом устройства, два аналого-цифровых преобразователя 2, согласованный фильтр 3, вычислитель модуля 4, два элемента задержки 5, блок оценки положения пика амплитуды сигнала при наличии весовой обработки в согласованном фильтре 6, вычислитель абсолютного значения 7, схему сравнения чисел 8, мультиплексор 9, блок определения величины пика амплитуды сигнала 10, память порогов обнаружения 11, пороговое устройство 12, выход которого является выходом устройства.
Блок оценки положения пика амплитуды сигнала при наличии весовой обработки в согласованном фильтре 6 (Фиг.2) содержит два устройства вычитания 13, входы первого из которых являются первым и третьим входами блока, а первый вход второго устройства вычитания 13 является вторым входом блока, сумматор 14, первый делитель 15, умножитель 16 и второй делитель 15, выход которого является выходом блока.
Блок определения величины пика амплитуды сигнала 10 (Фиг.3) содержит устройство вычитания 13, входы которого являются третьим и четвертым входами блока, умножитель 16, первый вход которого является первым входом блока, делитель 15 и сумматор 14, первый вход которого является вторым входом блока, а выход сумматора 14 является выходом блока.
Устройство на Фиг.1 работает следующим образом. На формирователь квадратур 1 поступают принятые радиолокатором сигналы, после их усиления и переноса на промежуточную частоту. На первом и втором выходах формирователя квадратур образуются, соответственно, вещественная и мнимая части комплексной огибающей входного сигнала (А.Б.Сергиенко. Цифровая обработка сигналов, СПб.: Питер, 2003, с.142), которые дискретизируются по дальности с частотой Найквиста и преобразуются в цифровую форму в первом и втором АЦП 2. Далее многоразрядные числа, представляющие квадратурные составляющие сигнала с выходов первого и второго АЦП2, подаются на согласованный фильтр 3, где производится их свертка с копией комплексной огибающей зондирующего сигнала. С первого и второго выходов согласованного фильтра 3 квадратурные составляющие сигналов подаются на вычислитель модуля 4, реализующий функцию вычисления модуля комплексного числа. Модули квадратурных составляющих сигнала с выхода вычислителя модуля 4 подаются на два последовательно соединенных элемента задержки 5, в каждом из которых задерживаются на время, равное периоду дискретизации в АЦП 2. С выхода первого элемента задержки, таким образом, снимается значение модуля квадратурных составляющих сигнала в очередном проверяемом элементе дальности xk, в то время как модули квадратурных составляющих сигнала в предыдущем и последующем элементах дальности снимаются, соответственно, с выхода вычислителя модуля 4 и выхода второго элемента задержки 5. Сигналы с выходов вычислителя модуля 4, первого и второго элементов задержки 5 подаются на входы блока оценки положения пика амплитуды сигнала и второй, третий и четвертый входы блока определения величины пика амплитуды сигнала 10, на первый вход которого поступает величина оценки положения пика амплитуды сигнала  с выхода блока оценки положения пика амплитуды сигнала.
с выхода блока оценки положения пика амплитуды сигнала.
Таким образом, на выходах блока оценки положения пика амплитуды сигнала и блока определения величины пика амплитуды сигнала 10 формируются, соответственно, значения 
 определяемые формулами (1), (2). Значения
определяемые формулами (1), (2). Значения  с выхода блока оценки положения пика амплитуды сигнала подаются на вычислитель абсолютного значения 7 и, далее, на схему сравнения чисел 8. В схеме сравнения чисел 8 проводится проверка выполнения условия
с выхода блока оценки положения пика амплитуды сигнала подаются на вычислитель абсолютного значения 7 и, далее, на схему сравнения чисел 8. В схеме сравнения чисел 8 проводится проверка выполнения условия  при выполнении которого с выхода схемы сравнения чисел 8 снимается единичный сигнал, причем пороговые коэффициенты
при выполнении которого с выхода схемы сравнения чисел 8 снимается единичный сигнал, причем пороговые коэффициенты  T подаются на управляющие входы схемы сравнения чисел 8. Сигналы с выхода схемы сравнения чисел 8 подаются на управляющий вход мультиплексора 9. На первый и второй входы мультиплексора 9 подаются, соответственно, модуль квадратурных составляющих xk с выхода первого элемента задержки 5 и величина
T подаются на управляющие входы схемы сравнения чисел 8. Сигналы с выхода схемы сравнения чисел 8 подаются на управляющий вход мультиплексора 9. На первый и второй входы мультиплексора 9 подаются, соответственно, модуль квадратурных составляющих xk с выхода первого элемента задержки 5 и величина  с выхода блока определения величины пика амплитуды сигнала 10. Причем при наличии нулевого сигнала на управляющем входе мультиплексора 9 на его выход передается сигнал с его первого входа, а при наличии единичного сигнала на управляющем входе мультиплексора 9 на его выход передается сигнал с его второго входа. Сигналы с выхода схемы сравнения 8 подаются на вход блока памяти порогов обнаружения 11, с выхода которого, в зависимости от значений входных сигналов снимается величина одного из порогов обнаружения С, которая подается на второй вход порогового устройства 12. Сигнал с выхода мультиплексора 9 подается на первый вход порогового устройства 12, где сравнивается с выбранным порогом обнаружения, при превышении которого на выходе порогового устройства 12 формируется единичный сигнал, передающийся на выход устройства.
с выхода блока определения величины пика амплитуды сигнала 10. Причем при наличии нулевого сигнала на управляющем входе мультиплексора 9 на его выход передается сигнал с его первого входа, а при наличии единичного сигнала на управляющем входе мультиплексора 9 на его выход передается сигнал с его второго входа. Сигналы с выхода схемы сравнения 8 подаются на вход блока памяти порогов обнаружения 11, с выхода которого, в зависимости от значений входных сигналов снимается величина одного из порогов обнаружения С, которая подается на второй вход порогового устройства 12. Сигнал с выхода мультиплексора 9 подается на первый вход порогового устройства 12, где сравнивается с выбранным порогом обнаружения, при превышении которого на выходе порогового устройства 12 формируется единичный сигнал, передающийся на выход устройства.
Блок оценки положения пика амплитуды сигнала при наличии весовой обработки в согласованном фильтре 6 (Фиг.2) работает следующим образом. Вычисленная в первом устройстве вычитания 13 разность xk+1-xk-1 подается на первый вход второго делителя 15. На выходе сумматора 14, входы которого соединены со входами первого устройства вычитания 13, образуется величина xk+1-xk-1, которая с выхода сумматора 14 подается на первый вход первого делителя 15, на второй вход которого подается число 2. С выхода первого делителя 15 величина  подается на второй вход второго устройства вычитания 13, с выхода которого величина разности подается на первый вход умножителя 16, на второй вход которого подается число 4. С выхода умножителя 16 величина
подается на второй вход второго устройства вычитания 13, с выхода которого величина разности подается на первый вход умножителя 16, на второй вход которого подается число 4. С выхода умножителя 16 величина  подается на второй вход второго делителя 15, на выходе которого образуется значение
подается на второй вход второго делителя 15, на выходе которого образуется значение  по формуле (1).
по формуле (1).
Блок определения величины пика амплитуды сигнала 10 (Фиг.3) работает следующим образом. Разность чисел с выхода устройства вычитания 13 подается на второй вход умножителя 16, выходной сигнал которого поступает на первый вход делителя 15, на второй вход которого подается число 4. С выхода делителя 15 величина  подается на второй вход сумматора 14, на выходе которого образуется значение по формуле (2).
подается на второй вход сумматора 14, на выходе которого образуется значение по формуле (2).
Техническая реализация предлагаемого способа обнаружения сигналов по варианту 2 возможна на основе устройства, показанного на Фиг.4, Фиг.5. Устройство на Фиг.4 содержит формирователь квадратур 1, вход которого является входом устройства, два аналого-цифровых преобразователя 2, согласованный фильтр 3, вычислитель модуля 4, два элемента задержки 5, сумматор 14, блок оценки положения пика амплитуды сигнала при отключении весовой обработки в согласованном фильтре 17, блок оценки положения пика амплитуды сигнала при наличии весовой обработки в согласованном фильтре 6, вычислитель абсолютного значения 7, схему сравнения чисел 8, два мультиплексора 9, блок определения величины пика амплитуды сигнала 10, память порогов обнаружения 11, пороговое устройство 12, выход которого является выходом устройства.
Блок оценки положения пика амплитуды сигнала при отключении весовой обработки в согласованном фильтре 17 (Фиг.5) содержит сумматор 14, входы которого являются входами блока, делитель 15 и инвертор 18, выход которого является выходом блока.
Устройство на Фиг.4 работает следующим образом. На формирователь квадратур 1 поступают принятые радиолокатором сигналы, после их усиления и переноса на промежуточную частоту. На первом и втором выходах формирователя квадратур образуются, соответственно, вещественная и мнимая части комплексной огибающей входного сигнала (А.Б.Сергиенко. Цифровая обработка сигналов, СПб.: Питер, 2003, с.142), которые дискретизуются с частотой Найквиста и преобразуются в цифровую форму в первом и втором АЦП 2. Далее многоразрядные числа, представляющие квадратурные составляющие сигнала, с выходов первого и второго АЦП2 подаются на согласованный фильтр 3, где производится их свертка с копией комплексной огибающей зондирующего сигнала. На управляющий вход согласованного фильтра 3 подается сигнал включения ВО, при единичном значении которого производится взвешивание сигналов весовой функцией, снижающей УБЛ сжатых сигналов на выходе согласованного фильтра 3. С первого и второго выходов согласованного фильтра 3 квадратурные составляющие сжатых сигналов подаются на вычислитель модуля 4, реализующий функцию вычисления модуля комплексного числа. Модули квадратурных составляющих с выхода вычислителя модуля 4 подаются на два последовательно соединенных элемента задержки 5, в каждом из которых задерживаются на время, равное периоду дискретизации в АЦП 2. С выхода первого элемента задержки, таким образом, снимается значение модуля квадратурных составляющих в очередном проверяемом элементе дальности xk, в то время как модули квадратурных составляющих в предыдущем и последующем элементах дальности снимаются, соответственно, с выхода вычислителя модуля 4 и выхода второго элемента задержки 5. Сигналы с выхода первого и второго элементов задержки 5 подаются на входы блока оценки положения пика амплитуды сигнала при отключении весовой обработки в согласованном фильтре 17 и входы сумматора 14, в которых, соответственно, вычисляются значения  по формулам (3), (4). Сигналы с выходов вычислителя модуля 4, первого и второго элементов задержки 5 подаются на входы блока оценки положения пика амплитуды сигнала при наличии весовой обработки в согласованном фильтре 6 и второй, третий и четвертый входы блока определения величины пика амплитуды сигнала 10, на первый вход которого поступает величина оценки положения пика амплитуды сигнала 1 с выхода блока оценки положения пика сигнала при наличии весовой обработки в согласованном фильтре 6. Таким образом, на выходах блока оценки положения пика амплитуды сигнала при наличии весовой обработки в согласованном фильтре 6 и блока определения величины пика амплитуды сигнала 10 формируются, соответственно, значения
по формулам (3), (4). Сигналы с выходов вычислителя модуля 4, первого и второго элементов задержки 5 подаются на входы блока оценки положения пика амплитуды сигнала при наличии весовой обработки в согласованном фильтре 6 и второй, третий и четвертый входы блока определения величины пика амплитуды сигнала 10, на первый вход которого поступает величина оценки положения пика амплитуды сигнала 1 с выхода блока оценки положения пика сигнала при наличии весовой обработки в согласованном фильтре 6. Таким образом, на выходах блока оценки положения пика амплитуды сигнала при наличии весовой обработки в согласованном фильтре 6 и блока определения величины пика амплитуды сигнала 10 формируются, соответственно, значения  определяемые формулами (1), (2). Значения
определяемые формулами (1), (2). Значения  с выхода блока оценки положения пика амплитуды сигнала при отключении весовой обработки в согласованном фильтре 17 подаются на вычислитель абсолютного значения 7 и далее на схему сравнения чисел 8. В схеме сравнения чисел 8 проводится проверка выполнения условия
с выхода блока оценки положения пика амплитуды сигнала при отключении весовой обработки в согласованном фильтре 17 подаются на вычислитель абсолютного значения 7 и далее на схему сравнения чисел 8. В схеме сравнения чисел 8 проводится проверка выполнения условия  при выполнении которого с выхода схемы сравнения чисел 8 снимается единичный сигнал, причем пороговые коэффициенты T1, T2 подаются на управляющие входы схемы сравнения чисел 8. Сигналы с выхода схемы сравнения чисел 8 подаются на управляющий вход первого мультиплексора 9. На первый и второй входы первого мультиплексора 9 подаются, соответственно, модуль квадратурных составляющих xk с выхода первого элемента задержки 5 и величина с выхода сумматора 14. Причем при наличии нулевого сигнала на управляющем входе первого мультиплексора 9 на его выход передается сигнал с его первого входа, а при наличии единичного сигнала на управляющем входе первого мультиплексора 9 на его выход передается сигнал с его второго входа. Сигналы с выхода первого мультиплексора 9 и блока определения величины пика амплитуды сигнала 10 подаются, соответственно, на первый и второй входы второго мультиплексора 9, на управляющий вход которого поступает сигнал включения весовой обработки, при нулевом значении которого на выход второго мультиплексора 9 передается сигнал с его первого входа, а при единичном значении сигнала включения весовой обработки на выход второго мультиплексора 9 передается сигнал с его второго входа. Сигналы с выхода схемы сравнения 8 и сигнал включения весовой обработки подаются на входы блока памяти порогов обнаружения 11, с выхода которого в зависимости от значений входных сигналов снимается величина одного из порогов обнаружения C, которая подается на второй вход порогового устройства 12. Сигнал с выхода второго мультиплексора 9 подается на первый вход порогового устройства 12, где сравнивается с выбранным порогом обнаружения, при превышении которого на выходе порогового устройства 12 формируется единичный сигнал, передающийся на выход устройства.
при выполнении которого с выхода схемы сравнения чисел 8 снимается единичный сигнал, причем пороговые коэффициенты T1, T2 подаются на управляющие входы схемы сравнения чисел 8. Сигналы с выхода схемы сравнения чисел 8 подаются на управляющий вход первого мультиплексора 9. На первый и второй входы первого мультиплексора 9 подаются, соответственно, модуль квадратурных составляющих xk с выхода первого элемента задержки 5 и величина с выхода сумматора 14. Причем при наличии нулевого сигнала на управляющем входе первого мультиплексора 9 на его выход передается сигнал с его первого входа, а при наличии единичного сигнала на управляющем входе первого мультиплексора 9 на его выход передается сигнал с его второго входа. Сигналы с выхода первого мультиплексора 9 и блока определения величины пика амплитуды сигнала 10 подаются, соответственно, на первый и второй входы второго мультиплексора 9, на управляющий вход которого поступает сигнал включения весовой обработки, при нулевом значении которого на выход второго мультиплексора 9 передается сигнал с его первого входа, а при единичном значении сигнала включения весовой обработки на выход второго мультиплексора 9 передается сигнал с его второго входа. Сигналы с выхода схемы сравнения 8 и сигнал включения весовой обработки подаются на входы блока памяти порогов обнаружения 11, с выхода которого в зависимости от значений входных сигналов снимается величина одного из порогов обнаружения C, которая подается на второй вход порогового устройства 12. Сигнал с выхода второго мультиплексора 9 подается на первый вход порогового устройства 12, где сравнивается с выбранным порогом обнаружения, при превышении которого на выходе порогового устройства 12 формируется единичный сигнал, передающийся на выход устройства.
Блок оценки положения пика амплитуды сигнала при отключении весовой обработки в согласованном фильтре 17 (Фиг.5) работает следующим образом. Вычисленная в сумматоре 14 сумма входных сигналов xk+xk-1 подается на второй вход делителя 15, первый вход которого соединен со вторым входом сумматора 14, на который подается сигнал xk-1,. Частное 
 с выхода делителя 15 подается на инвертор 18, в котором меняется по знаку, и далее - на выход блока.
с выхода делителя 15 подается на инвертор 18, в котором меняется по знаку, и далее - на выход блока.
Расчеты характеристик предлагаемых вариантов способа обнаружения сигналов проводились методом статистического моделирования в среде программы MatLab v.7. Параметры были следующими: длительность принятого ЛЧМ сигнала Ts=21.66 мкс, девиация частоты W=3 МГц, частота дискретизации Fd=3 МГц, вероятность ложных тревог при обнаружении F=10-6, весовая обработка по закону Хэмминга.
Зависимости потерь обнаружения L(dB) от задержки сигнала относительно моментов дискретизации τ, нормированной к интервалу дискретизации τd, показаны на Фиг.6 при наличии весовой обработки в согласованном фильтре (вариант 1 изобретения) и на Фиг.7 при отключении весовой обработки в согласованном фильтре (вариант 2 изобретения). При наличии весовой обработки (вариант 1 изобретения) имеет место снижение потерь обнаружения: по сравнению с аналогом до 1 дБ, по сравнению с прототипом средние потери снижаются на 0.2-0.3 дБ, а максимальные ~ на 0.5-0.6 дБ. При отключенной весовой обработке предлагаемый способ обнаружения сигналов (вариант 2 изобретения) обеспечивает меньшие значения потерь - выигрыш до 1 дБ по сравнению с прототипом и до 2 дБ по сравнению с аналогом.
Таким образом, использование предлагаемого изобретения по варианту 1 позволит решить поставленную задачу с получением технического результата, который заключается в снижении потерь обнаружения сигнала за счет ошибок интерполяции величины пика амплитуды сигнала при совпадении или незначительном сдвиге по времени положения пика амплитуды сигнала относительно моментов дискретизации. Использование предлагаемого изобретения по варианту 2 позволит решить поставленную задачу с получением технического результата, который заключается в снижении потерь обнаружения сигнала за счет ошибок интерполяции величины пика амплитуды сигнала при отключении весовой обработки в согласованном фильтре.

Изобретения могут быть использованы для обнаружения сигналов в системах цифровой обработки. Достигаемым техническим результатом является снижение потерь обнаружения сигнала. Для достижения указанного результата в способе обнаружения сигналов, включающем формирование квадратурных составляющих принятых радиолокатором сигналов, дискретизацию их по дальности с частотой Найквиста, согласованную фильтрацию с весовой обработкой, вычисление модуля квадратурных составляющих на выходе согласованного фильтра, интерполяцию величины пика амплитуды сигнала по значениям модуля квадратурных составляющих на выходе согласованного фильтра в 3-х элементах дальности, сравнение величины пика амплитуды сигнала с порогом обнаружения С, выбираемым так, чтобы обеспечить заданное значение вероятности ложных тревог, принятие решения об обнаружении сигнала, если пик амплитуды сигнала превышает порог обнаружения, в первом варианте интерполяцию величины пика амплитуды сигнала производят только, если модуль оценки временного положения пика амплитуды сигнала превышает пороговую величину, а во втором варианте, при отключении весовой обработки в согласованном фильтре, интерполяцию величины пика амплитуды сигнала производят по значениям модуля квадратурных составляющих на выходе согласованного фильтра в 2-х элементах дальности, с проверкой соответствующего условия, при этом для принятия решения о наличии сигнала упомянутый порог обнаружения С делают переменным, зависящим от проведенных операций по определению величины пика амплитуды сигнала. 2 н.п. ф-лы, 7 ил.
1. Способ обнаружения сигналов в системах цифровой обработки, в котором формируют квадратурные составляющие принятых радиолокатором сигналов, дискретизируют их по дальности с частотой Найквиста, пропускают через согласованный фильтр с весовой обработкой, вычисляют модуль квадратурных составляющих на выходе согласованного фильтра, оценивают временное положение пика амплитуды сигнала  на выходе согласованного фильтра относительно временного положения k-го элемента дальности по следующей формуле:
на выходе согласованного фильтра относительно временного положения k-го элемента дальности по следующей формуле:
 ,
,
где xk-1, xk, xk+1 - значения модуля квадратурных составляющих на выходе согласованного фильтра соответственно в k-1, k, k+1 элементах дальности, k=2, …, N-1, N - число элементов дальности,
проверяют условие  , при выполнении указанного условия определяют величину пика амплитуды сигнала
, при выполнении указанного условия определяют величину пика амплитуды сигнала  на выходе согласованного фильтра по следующей формуле:
на выходе согласованного фильтра по следующей формуле:
 ,
,
сравнивают величину пика амплитуды сигнала с порогом обнаружения С, выбираемым из условия обеспечения заданного значения вероятности ложных тревог, принимают решение об обнаружении сигнала в k-м элементе дальности, если  , отличающийся тем, что после оценивания временного положения пика амплитуды сигнала на выходе согласованного фильтра относительно временного положения k-го элемента дальности по приведенной формуле сравнивают модуль оценки временного положения пика амплитуды сигнала
, отличающийся тем, что после оценивания временного положения пика амплитуды сигнала на выходе согласованного фильтра относительно временного положения k-го элемента дальности по приведенной формуле сравнивают модуль оценки временного положения пика амплитуды сигнала  с пороговым коэффициентом Т, определяемым допустимой величиной потерь обнаружения при совпадении времени поступления принятого радиолокатором сигнала с моментами дискретизации, если выполняется условие
с пороговым коэффициентом Т, определяемым допустимой величиной потерь обнаружения при совпадении времени поступления принятого радиолокатором сигнала с моментами дискретизации, если выполняется условие  , то определяют величину пика амплитуды сигнала на выходе согласованного фильтра по приведенной формуле, если упомянутое условие не выполняется, то есть
, то определяют величину пика амплитуды сигнала на выходе согласованного фильтра по приведенной формуле, если упомянутое условие не выполняется, то есть  , то величину пика амплитуды сигнала на выходе согласованного фильтра считают равной xk, принимают решение о наличии сигнала в k-м элементе дальности, при этом упомянутый порог обнаружения С делают переменным, зависящим от того, каким образом была определена величина пика амплитуды сигнала .
, то величину пика амплитуды сигнала на выходе согласованного фильтра считают равной xk, принимают решение о наличии сигнала в k-м элементе дальности, при этом упомянутый порог обнаружения С делают переменным, зависящим от того, каким образом была определена величина пика амплитуды сигнала .
2. Способ обнаружения сигналов в системах цифровой обработки, в котором формируют квадратурные составляющие принятых радиолокатором сигналов, дискретизируют их по дальности с частотой Найквиста, пропускают через согласованный фильтр, вычисляют модуль квадратурных составляющих на выходе согласованного фильтра, оценивают временное положение пика амплитуды сигнала на выходе согласованного фильтра относительно временного положения k-го элемента дальности по следующей формуле:
,
где xk-1, xk, xk+1 - значения модуля квадратурных составляющих на выходе согласованного фильтра соответственно k-1, k, k+1 элементах дальности, k=2, …, N-1, N - число элементов дальности,
проверяют условие  , при выполнении указанного условия определяют величину пика амплитуды сигнала на выходе согласованного фильтра по следующей формуле:
, при выполнении указанного условия определяют величину пика амплитуды сигнала на выходе согласованного фильтра по следующей формуле:
 ,
,
сравнивают величину пика амплитуды сигнала с порогом обнаружения С, выбираемым из условия обеспечения заданного значения вероятности ложных тревог, принимают решение об обнаружении сигнала в k-м элементе дальности, если  , отличающийся тем, что после вычисления модуля квадратурных составляющих на выходе согласованного фильтра производят оценку временного положения пика амплитуды сигнала на выходе согласованного фильтра по следующей формуле:
, отличающийся тем, что после вычисления модуля квадратурных составляющих на выходе согласованного фильтра производят оценку временного положения пика амплитуды сигнала на выходе согласованного фильтра по следующей формуле:
 ,
,
модуль оценки временного положения пика амплитуды сигнала на выходе согласованного фильтра сравнивают с пороговыми коэффициентами T1, T2, определяемыми допустимой величиной потерь обнаружения при совпадении времени поступления принятого радиолокатором сигнала с моментами дискретизации, при выполнении условия  определяют величину пика амплитуды сигнала на выходе согласованного фильтра по следующей формуле:
определяют величину пика амплитуды сигнала на выходе согласованного фильтра по следующей формуле:
 ,
,
если упомянутое выше условие не выполняется, то есть  , то величину пика амплитуды сигнала считают равной xk, принимают решение о наличии сигнала в k-м элементе дальности, для чего упомянутый порог обнаружения С делают переменным, зависящим от того, каким образом была определена величина пика амплитуды сигнала .
, то величину пика амплитуды сигнала считают равной xk, принимают решение о наличии сигнала в k-м элементе дальности, для чего упомянутый порог обнаружения С делают переменным, зависящим от того, каким образом была определена величина пика амплитуды сигнала .
| Применение цифровой обработки сигналов | |||
| / Под ред | |||
| ОППЕНГЕЙМА Э | |||
| - М.: Мир, 1978, с.323-326 | |||
| СПОСОБ РАЗРЕШЕНИЯ ЦЕЛЕЙ ПО ДАЛЬНОСТИ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И ИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СО СЖАТИЕМ ИМПУЛЬСОВ И ВОССТАНОВЛЕНИЕМ СИГНАЛОВ | 2004 |
|
RU2296345C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ | 1995 |
|
RU2099738C1 |
| СПОСОБ КОРРЕЛЯЦИОННОЙ ОБРАБОТКИ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ БЫСТРОДВИЖУЩИХСЯ ЦЕЛЕЙ | 2005 |
|
RU2293997C1 |
| WO 2008094293 A2, 07.08.2008 | |||
| WO 2008067466 A1, 05.06.2008 | |||
| KR 20080025677 A, 21.03.2008. | |||

