Изобретение относится к области авиастроения, а именно к винтокрылым летательным аппаратам вертикального взлета и посадки.
Известен вертолет продольной схемы (Изаксон A.M. «Советское вертолетостроение», издательство «Машиностроение», Москва, 1964 г.), который состоит из фюзеляжа, несущих винтов с шарнирным креплением лопастей, системы управления лопастями несущих винтов, выполненной в виде командных рычагов управления в кабине пилота, соединенных посредством проводки управления с автоматами перекоса и лопастями, двигателей для привода несущих винтов.
На известном вертолете лопасти несущих винтов прикреплены к втулкам посредством горизонтальных и вертикальных шарниров. Система управления лопастями несущих винтов выполнена в виде командных рычагов управления в кабине пилота, соединенных посредством проводки управления с автоматами перекоса и лопастями. Для движения вертолета в горизонтальном направлении несущие винты с помощью автоматов перекоса наклоняются вперед и создают не только подъемную силу, но и пропульсивную, направленную вперед для преодоления вредного сопротивления вертолета. Возникающие по мере роста скорости полета и увеличения угла наклона несущих винтов вперед явления срыва потока на лопастях приводят к снижению несущей способности несущих винтов и аэродинамического качества вертолета, к чрезмерному росту нагрузок и напряжений в системе управления, что не допускает дальнейшего увеличения скорости полета. Кроме того, увеличивается наклон вперед фюзеляжа вертолета, приводящий к дополнительному росту вредного сопротивления, что также существенно ограничивает возможности увеличения максимальной скорости полета.
Технической задачей заявляемого технического решения является повышение аэродинамического качества вертолета и увеличение максимальной скорости полета.
Поставленная техническая задача достигается тем, что вертолет продольной схемы, содержащий фюзеляж, несущие винты, к втулкам которых прикреплены лопасти, систему управления лопастями несущих винтов, состоящую из командных рычагов управления в кабине пилота и проводки управления, соединенной с лопастями, автопилот и двигатели для привода несущих винтов, дополнительно снабжен не менее чем двумя воздушными винтами, установленными симметрично относительно продольной оси фюзеляжа с возможностью изменения общего шага как совместно, так и дифференциально, система управления вертолетом снабжена устройством, изменяющим частоту вращения несущих винтов, лопасти закреплены на втулках несущих винтов жестко, а автопилот выполнен с функцией стабилизации горизонтального положения фюзеляжа.
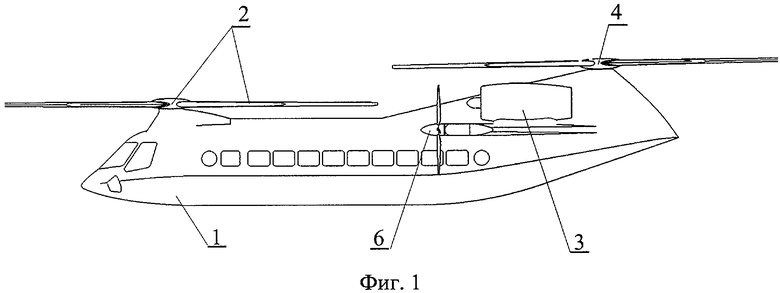
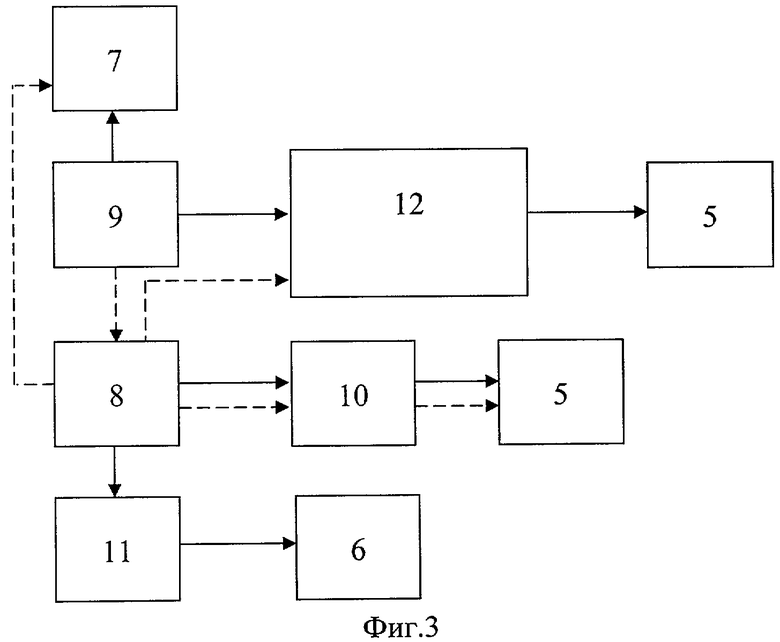
Изобретение поясняется чертежами, где на Фиг.1 изображен вертолет продольной схемы, вид сбоку, на Фиг.2 изображен вертолет продольной схемы, вид сверху, на Фиг.3 изображена схема управления вертолетом.
Вертолет продольной схемы содержит фюзеляж 1, на котором установлены несущие винты 2 и двигатели 3. К втулкам 4 несущих винтов 2 жестко прикреплены лопасти 5. На фюзеляже симметрично относительно продольной оси установлено не менее двух воздушных винтов 6 с приводом от двигателей 3. На вертолете в системе управления установлено устройство для изменения частоты вращении несущих винтов 7 (Фиг.3). Система управления состоит из командных рычагов управления 8 в кабине пилота и автопилота 9, которые соединены посредством проводки управления 10 с лопастями 5 несущих винтов 2. Кроме того, рычаги управления 8 соединены с устройством для изменения общего шага воздушных винтов 11, которое, в свою очередь, соединено с воздушными винтами 6. Автопилот 9 соединен также с устройством дифференциального управления общим шагом несущих винтов 12 и лопастями 5 с целью стабилизации горизонтального положения фюзеляжа.
При вертикальном взлете практически вся потребная для взлета мощность передается от двигателей 3 на несущие винты 2, которые вращаются со взлетной частотой. Углы общего шага воздушных винтов 6 устанавливаются пилотом с помощью рычагов управления 8 таким образом, чтобы эти винты не создавали силы тяги. Разгон вертолета продольной схемы вперед с режима висения может выполняться одним из способов: «по-вертолетному» или «по-самолетному». Например, для разгона «по-вертолетному» пилот отклонением рычагов управления 8 создает на несущих винтах 2 продольные моменты на пикирование, вследствие чего фюзеляж 1 вертолета продольной схемы наклоняется вперед вместе с несущими винтами 2, которые при этом и создают горизонтальную составляющую силы. По мере увеличения скорости полета в создание горизонтальной силы вступают воздушные винты 6, углы общего шага которых по команде пилота посредством рычагов управления 8 и устройства для изменения шага лопастей воздушных винтов 11 увеличиваются, и при достижении определенной скорости (≈200 км/ч) всю силу для продвижения вперед создают только воздушные винты 6, а несущие винты 2 обеспечивают только потребную подъемную силу («самолетный» режим полета). В этом случае практически вся мощность двигателей 3 передается уже на воздушные винты 6. При этом частота вращения несущих винтов 2 с целью повышения аэродинамического качества вертолета продольной схемы уменьшается на 20-30% с помощью устройства для изменения частоты вращения несущих винтов 7. Высокое аэродинамическое качество несущих винтов 2 (в два с лишним раза превышающее соответствующую величину обычного, «шарнирного» винта) возможно благодаря жесткому креплению лопастей 5 несущих винтов 2 к втулкам 4. Уменьшение частоты вращения несущих винтов 2 происходит автоматически с участием автопилота 9. В случае необходимости разворота по курсу по команде пилота через отклонение рычагов управления 8 величины общего шага воздушных винтов 6 изменяются с помощью устройства для изменения шага лопастей воздушных винтов 6 дифференциально, то есть с увеличением шага на одном из винтов и с соответствующим уменьшением шага на другом. Создаваемый таким образом путевой момент разворачивает вертолет продольной схемы в нужную сторону. На каждом режиме полета «по-самолетному», характеризующемся барометрической высотой и скоростью полета, автопилот 9 через устройство дифференциального управления общим шагом несущих винтов 12 обеспечивает горизонтальное положение фюзеляжа 1, чем достигается минимальное сопротивление вертолета продольной схемы, что также положительно сказывается на аэродинамическом качестве несущих винтов 2 и вертолета продольной схемы в целом.
Изобретение относится к области авиастроения, а именно к винтокрылым летательным аппаратам вертикального взлета и посадки. Вертолет содержит фюзеляж, несущие винты, к втулкам которых прикреплены лопасти, систему управления лопастями несущих винтов, состоящую из командных рычагов управления в кабине пилота и проводки управления, соединенной с лопастями, автопилот и двигатели для привода несущих винтов. Вертолет дополнительно снабжен не менее чем двумя воздушными винтами с приводом от двигателей, установленными симметрично относительно продольной оси фюзеляжа с возможностью изменения общего шага как совместно, так и дифференциально. Система управления вертолетом снабжена устройством, изменяющим частоту вращения несущих винтов. Лопасти закреплены на втулках несущих винтов жестко. Автопилот выполнен с функцией стабилизации горизонтального положения фюзеляжа. Достигается повышение аэродинамического качества вертолета и увеличение максимальной скорости полета. 3 ил.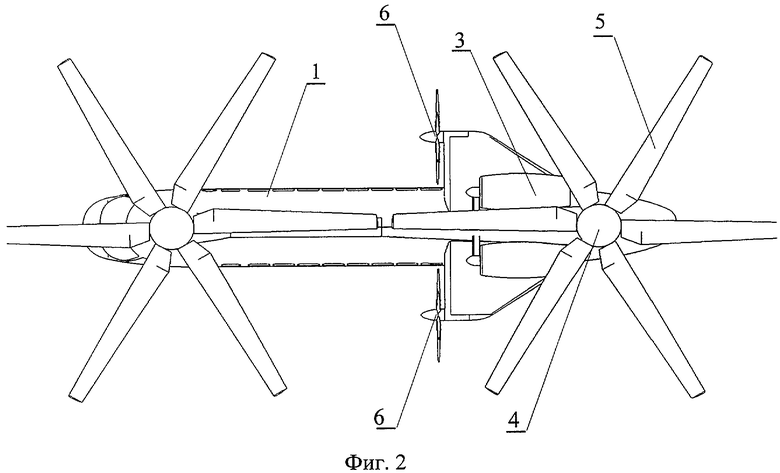
Вертолет продольной схемы, содержащий фюзеляж, несущие винты, к втулкам которых прикреплены лопасти, систему управления лопастями несущих винтов, состоящую из командных рычагов управления в кабине пилота и проводки управления, соединенной с лопастями, автопилот и двигатели для привода несущих винтов, отличающийся тем, что он дополнительно снабжен не менее чем двумя воздушными винтами с приводом от двигателей, установленными симметрично относительно продольной оси фюзеляжа с возможностью изменения общего шага как совместно, так и дифференциально, система управления вертолетом снабжена устройством, изменяющим частоту вращения несущих винтов, лопасти закреплены на втулках несущих винтов жестко, а автопилот выполнен с функцией стабилизации горизонтального положения фюзеляжа.
| МНОГОЦЕЛЕВОЙ ГИДРОКОНВЕРТОВИНТОПЛАН | 2007 |
|
RU2351506C2 |
| RU 2008101611 A, 10.05.2008 | |||
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ВЕРТОЛЕТА В РЕЖИМЕ ВИСЕНИЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2244339C1 |
| МНОГОВИНТОВОЙ ВЕРТОЛЕТ (ВАРИАНТЫ) | 2007 |
|
RU2351505C2 |
| US 6089501 A, 18.07.2000. | |||

