Изобретение относится к системам связи и может быть использовано для расширения зоны обслуживания в районах, где отсутствует или наблюдается неустойчивый прием радиотелевизионного сигнала сверхвысокой частоты (СВЧ) от космического аппарата (КА).
Прямому прохождению сигнала от источника сигнала космического аппарата до точки приема препятствует рельеф местности: наличие холма, или горной преграды, или при расположении точки приема в ложбине. В таких случаях используют специальные линии СВЧ-связи и ретрансляторы.
Известны способы передачи информации, реализованные в станциях спутниковой связи. Указанные станции обычно представляют собой приемопередающие радиостанции с одной общей антенной (на прием и на передачу). Для наведения антенны в этих станциях используют способы, в которых проводят режим программного наведения в заданную точку пространства, а также режим точного наведения по принимаемому сигналу (режим автосопровождения). Переход в режим автосопровождения осуществляют с помощью поиска и захвата сигнала (Покрас A.M., Сомов A.M., Цуриков Г.Г. Антенны земных станций спутниковой связи. - М.: Радио и связь, 1985 г., с.35-76).
В режиме точного наведения по принимаемому сигналу могут использоваться различные методы: метод экстремального наведения, моноимпульсный метод и др.
Недостатком данных способов является трудность реализации точного программного наведения антенны, что связано с необходимостью использования достаточно сложных точных измерительных средств.
Известен способ передачи информации, использованный в станции спутниковой связи, содержащей параболическую зеркальную антенну с СВЧ-блоком и блоками азимутальной и угломестной осей, блок наведения антенны, вычислительное устройство, снабженное программами, включая программы наведения антенны (Фролов О.П. Антенны для земных станций спутниковой связи. - М.: Радио и связь, 2000 г., с.260-265).
В данном способе проводят режим программного наведения антенны по углу места и азимуту в заданную точку пространства, а также режим точного наведения антенны на источник сигнала с использованием автосопровождения, реализованного посредством метода экстремального наведения. Режим точного наведения антенны осуществляют путем перехода из режима программного наведения с использованием поиска и захвата сигнала.
Недостатком данного способа является значительная погрешность программного наведения. Это обусловлено, прежде всего, ошибкой определения меридиана.
Прототипом изобретения является способ передачи информации, реализованный в ретрансляторе, содержащем приемную и передающую параболические зеркальные антенны, а также СВЧ-блоки, блоки азимутальной и угломестной осей приемной и передающей антенн. В состав ретранслятора также входят блок наведения приемной антенны и вычислительное устройство, снабженное программами, включая программы наведения антенны (патент РФ №2308154, Н04В 5/00, 2007 г.).
В данном способе осуществляют наведение приемной антенны ретранслятора на источник сигнала по углу места и азимуту с использованием программного разворота по углу места и азимуту и точного наведения по принимаемому сигналу, а также программное наведение передающей антенны ретранслятора на абонентскую станцию в соответствии с расчитанными углом места и азимутом.
Недостатком данного способа является относительно невысокая точность наведения по азимуту приемной антенны на источник сигнала и передающей антенны на абонентскую станцию. Ошибка наведения обусловлена значительными нестационарными потерями радиотелевизионного сигнала в атмосфере из-за осадков при работе в КU-диапазоне частот (частота принимаемого сигнала 10,95-11,7 ГГц).
Предлагаемое изобретение относится к ретрансляторам, характеризующимся относительно невысокой скоростью передачи информации, имеющим сравнительно широкую диаграмму направленности антенны (1,5-3 градуса).
Рассматриваемые ретрансляторы устанавливаются на жестком основании. Приемная антенна принимает радиотелевизионный сигнал от КА. Точность положения современных КА («Экспресс», «Галс») высока и составляет 3-6 угловых минут. В связи с указанным, при требуемой точности наведения приемной и передающей антенн (18-36 угловых минут) достаточно ограничиться начальным наведением этих антенн и зафиксировать положение антенн на время эксплуатации до проведения очередных регламентных работ или ремонта. Это позволяет повысить экономичность ретранслятора, поскольку электропитание систем наведения указанных антенн отключают.
Отклонение основания ретранслятора от горизонтальной плоскости (ошибка негоризонтальности) может быть определена с помощью устройства местной вертикали, например маятникового типа, а также жидкостного уровня.
Точность программного наведения приемной и передающей антенн по углу места определяется ошибкой определения горизонтальной плоскости, ошибкой положения КА, ошибками местонахождения ретранслятора и абонентской станции (навигационными ошибками) и приборными ошибками. Для рассматриваемых ретрансляторов точность программного наведения антенн по углу места соответствует требованиям.
Для определения меридиана может быть использован радиокомпас, работающий от спутниковой радионавигационной системы. Радиокомпас с приемлемыми размерами (измерительной базой 3-6 метров) имеет точность (по уровню 3σ 20-45 угловых минут. Этого недостаточно для анализируемых ретрансляторов. Кроме того, использование радиокомпаса приводит к увеличению массы, габаритов, электропотребления и стоимости ретранслятора.
В прототипе в качестве физически реализуемого азимутального базового направления используют направление оптической оси приемной антенны ретранслятора на источник сигнала. При этом направление меридиана, которое используется в программе наведения передающей антенны ретранслятора по азимуту, находят расчетным путем. Данный метод не требует дополнительных аппаратурных затрат.
Ошибка программного наведения передающей антенны на абонентскую станцию по азимуту является суммой ошибки положения КА, навигационной ошибки, а также приборных ошибок (отработки угла). Ошибка положения современных КА существенно меньше, чем ошибка радиокомпаса.
В прототипе точное наведение приемной антенны на источник сигнала осуществляют с помощью метода экстремального наведения. Этот метод широко используют в станциях спутниковой связи из-за простоты аппаратурной реализации.
При использовании данного метода осуществляют сравнение сигналов, снимаемых в одинаковые временные интервалы, разнесенные по времени. Поэтому нестабильность принимаемого радиотелевизионного сигнала во времени из-за потерь в атмосфере приводит к дополнительной погрешности наведения, которая может превысить допустимое значение.
Технической задачей изобретения является повышение точности наведения по азимуту приемной антенны на источник сигнала и передающей антенны на абонентскую станцию в условиях потерь радиотелевизионного сигнала в атмосфере.
Для достижения указанного технического результата в способе передачи информации, включающем наведение приемной антенны ретранслятора на источник сигнала по углу места и азимуту с использованием программного разворота по углу места и азимуту и точного наведения по принимаемому сигналу, а также программное наведение передающей антенны ретранслятора на абонентскую станцию в соответствии с расчитанными углом места и азимутом, разворот приемной антенны по азимуту проводят в заданном направлении дискретно с измерением сигнала, при первом превышении сигнала заданного первого порогового значения производят остановку приемной антенны с измерением сигнала и определением скорости изменения сигнала в течение заданного первого интервала времени, после этого при допустимой скорости изменения сигнала продолжают разворот приемной антенны в заданном направлении при конечной величине сигнала первого интервала времени, меньшей первого порогового значения, до последующего превышения сигнала первого порогового значения, а при конечной величине сигнала, большей первого порогового значения, сначала осуществляют разворот приемной антенны в обратном направлении до уменьшения сигнала до величины, меньшей первого порогового значения в заданных пределах, после чего производят разворот приемной антенны в заданном направлении до последующего превышения сигнала первого порогового значения, после этого осуществляют остановку приемной антенны с измерением сигнала в течение заданного второго интервала времени, определяют с использованием измеренного сигнала и фиксируют в вычислительном устройстве ретранслятора азимут приемной антенны, соответствующий первому пороговому значению сигнала, после чего из данного фиксированного положения приемную антенну разворачивают на заданное количество шагов, при этом для группы сигналов, соответствующих последним соседним шагам, определяют среднее значение, которое вместе с сигналом, измеренным в указанном фиксированном положении, используют для нахождения абсолютной крутизны диаграммы направленности приемной антенны и определения граничного значения сигнала путем сравнения найденной абсолютной крутизны с заданными опорными значениями, затем продолжают разворот приемной антенны по азимуту, при котором в вычислительном устройстве определяют разности текущего и предшествующего значений сигнала, а также производят сравнение текущего сигнала с найденным граничным значением сигнала, при этом, пока значение сигнала меньше граничного значения, разворот приемной антенны продолжают при фиксации положительной разности указанных сигналов, а при отрицательной разности текущего и предшествующего значений сигнала, которую фиксируют как сбой, осуществляют реверс приемной антенны с повторным измерением двух указанных значений сигнала, причем разворот приемной антенны продолжают после фиксации одного сбоя и последующей положительной разности текущего и предшествующего значений сигнала при фиксации двух сбоев подряд, а также при превышении измеряемого сигнала граничного значения разность текущего и предыдущего значений сигнала определяют при развороте приемной антенны на два шага; при этом разворот приемной антенны продолжают, если при последовательном ее развороте на заданную группу шагов фиксируют положительную разность текущего и предшествующего значений сигнала заданное количество раз, равное количеству шагов в группе, а если указанное заданное количество раз фиксируют отрицательную разность текущего и предшествующего значений сигнала, то осуществляют остановку приемной антенны в положении, соответствующем первому шагу данной группы, на заданный третий интервал времени, фиксируют данное контрольное значение азимута приемной антенны, характеризующее прохождение максимума сигнала по изменению полярности разности текущего и предшествующего значений сигнала, если при указанном развороте приемной антенны фиксируют разнополярные разности текущего и предшествующего значений сигнала, то проводят повторные измерения текущего и предшествующего значений сигнала с реверсом приемной антенны для ее положения, соответствующего первому шагу указанной группы шагов до тех пор, пока количество разностей одного знака станет равным указанному заданному количеству, при этом при положительной разности продолжают разворот приемной антенны, а при отрицательной разности производят ее остановку в положении, соответствующем первому шагу, и фиксируют контрольное значение азимута, затем по результатам измерения и обработки сигнала при контрольном значении азимута определяют максимум сигнала, программу первого хода приемной антенны - рабочий ход или измерительный ход, скорость изменения сигнала, а также второе пороговое значение при первом измерительном ходе, после этого при допустимых значениях максимума сигнала и скорости изменения сигнала производят разворот приемной антенны в том же направлении и остановку на второй интервал времени - при уменьшении сигнала до первого порогового значения при первом рабочем ходе, или до второго порогового значения - при первом измерительном ходе, определяют и вводят в вычислительное устройство азимут, соответствующий пороговому значению сигнала, при этом азимуты, соответствующие первому пороговому значению, используют для нахождения азимута, соответствующего максимуму сигнала при первом ходе приемной антенны, затем производят разворот приемной антенны в обратную сторону, при этом при первом рабочем ходе осуществляют остановку приемной антенны при контрольном значении азимута на заданный четвертый интервал времени с измерением сигнала и определением скорости изменения сигнала, а при первом измерительном ходе приемной антенны последовательно осуществляют остановки с измерением сигнала и определением скорости изменения сигнала при контрольном значении азимута на заданный пятый интервал времени, а также при уменьшении сигнала до второго порогового значения на второй интервал времени с измерением сигнала и определением азимута, соответствующего второму пороговому значению сигнала, при этом азимуты, соответствующие второму пороговому значению, используют для нахождения азимута, соответствующего максимуму сигнала при втором ходе приемной антенны, затем, при допустимых значениях максимума сигнала и скорости изменения сигнала, приемную антенну разворачивают в обратную сторону, осуществляют остановку при контрольном значении азимута на заданный шестой интервал времени с измерением сигнала и определением скорости изменения сигнала, найденное для первого или второго хода приемной антенны значение азимута, соответствующего максимуму сигнала, при допустимых значениях максимума сигнала и скорости изменения сигнала используют при расчете программного азимута абонентской станции и наведении по азимуту приемной антенны на источник сигнала и передающей антенны на абонентскую станцию.
Способ реализуется благодаря проведению дополнительных режимов, связанных с наведением приемной антенны ретранслятора на источник сигнала.
В качестве примера рассматривается ретранслятор, в котором приемная и передающая антенны представляют собой направленную параболическую зеркальную антенну с шириной диаграммы направленности - ϕДН, равной 120 угловых минут.
Для частоты 11,5 ГГц диаметр такой антенны составляет 0,9 метра.
Высокой считается точность наведения антенны с потерями по мощности 0,5 дБ, что соответствует погрешности наведения ± 0,2 ϕДН. Для рассматриваемого примера это соответствует ошибке наведения ± 24 угловые минуты.
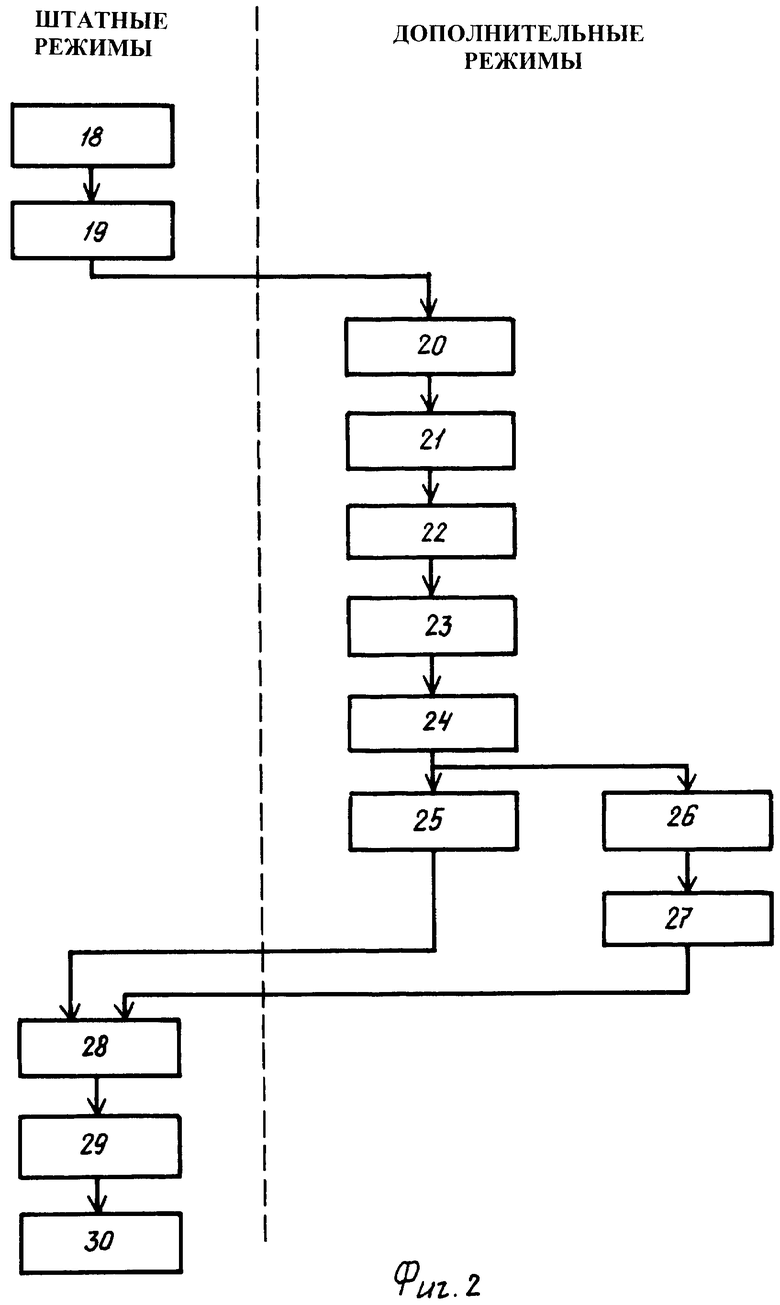
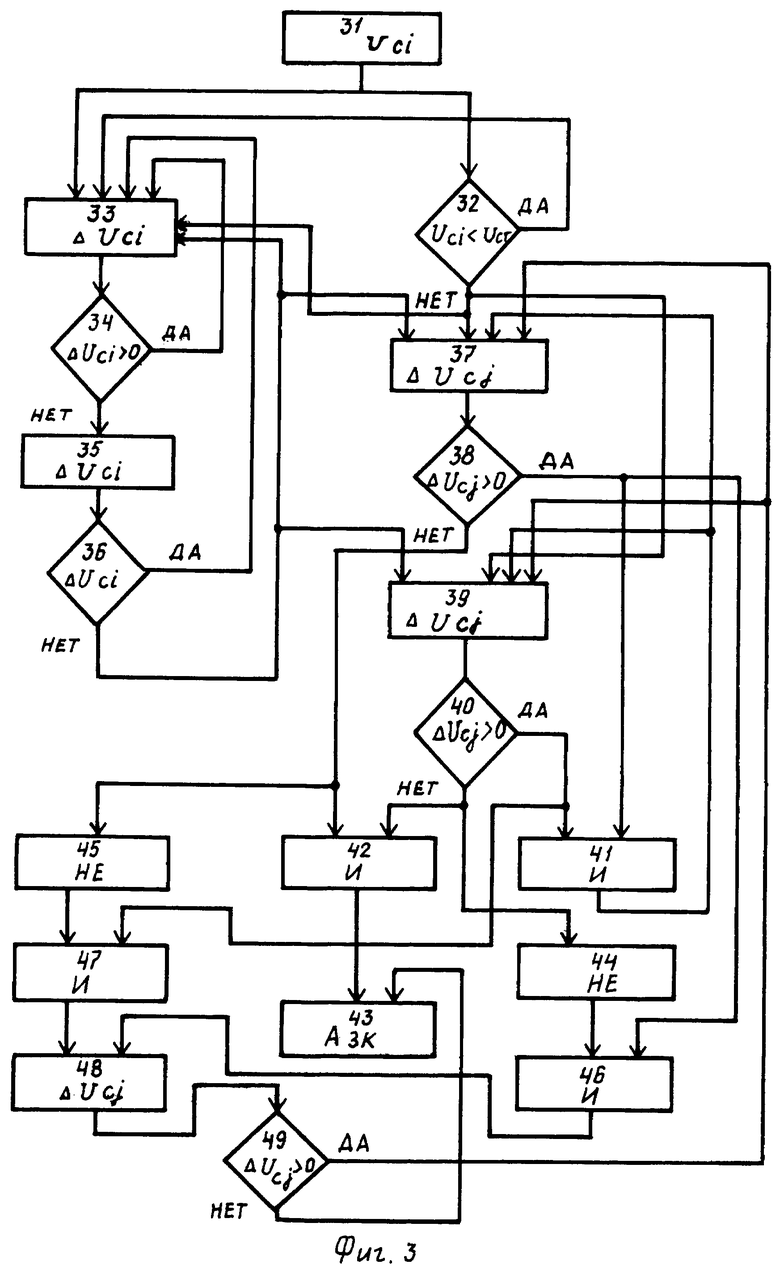
Способ иллюстрируется фиг.1-3, на которых приведены: на фиг.1 - функциональная схема ретранслятора, на фиг.2 - блок-схема режимов наведения приемной и передающей антенн ретранслятора, на фиг.3 - блок-схема подпрограммы определения контрольного значения азимута приемной антенны.
Ретранслятор, изображенный на фиг.1, содержит приемную антенну 1, на которой установлен СВЧ-блок 2 приемной антенны, соединенный первым выходом с размещенным на передающей антенне 3 СВЧ-блоком 4 передающей антенны. СВЧ-блок 2 и СВЧ-блок 4 предназначены для усиления, фильтрации и преобразования частоты ретранслируемого СВЧ-сигнала. Второй выход СВЧ-блока 2 приемной антенны соединен с блоком 5 наведения приемной антенны, предназначенным для преобразования СВЧ-сигнала в сигнал, используемый для точного наведения приемной антенны 1. Для управления по азимутальной оси 6 приемной антенны 1 ретранслятор содержит блок 7 азимутальной оси приемной антенны, а для управления по угломестной оси 8 приемной антенны 1 - блок 9 угломестной оси приемной антенны.
Для управления по азимутальной оси 10 передающей антенны 3 ретранслятор содержит блок 11 азимутальной оси передающей антенны, а для управления по угломестной оси 12 передающей антенны - блок 13 угломестной оси передающей антенны 3.
В состав блоков 7 и 9 приемной антенны и блоков 11 и 13 передающей антенны входят приводы, обеспечивающие повороты антенн вокруг осей.
Ретранслятор содержит также вычислительное устройство 14, предназначенное для управления приемной антенной 1 и передающей антенной 3 и соединенное с блоком 5, а также с блоками 7, 9, 11 и 13. В состав ретранслятора входит также устройство 15 ввода данных.
Приемная антенна 1 ретранслятора предназначена для усиления принимаемого радиотелевизионного сигнала 16, приходящего от источника сигнала, а передающая антенна 3 - для усиления излучаемого радиотелевизионного сигнала 17, поступающего от ретранслятора на абонентскую станцию.
На фиг.2 изображены режимы:
18 - программное наведение приемной антенны ретранслятора на источник сигнала по углу места;
19 - разворот приемной антенны ретранслятора по азимуту;
20 - определение скорости изменения сигнала;
21 - определение первого азимута, соответствующего пороговому значению сигнала;
22 - определение граничного значения сигнала;
23 - определение контрольного значения азимута приемной антенны ретранслятора;
24 - определение второго азимута, соответствующего пороговому значению сигнала;
25 - контроль сигнала (программа Рх-1);
26 - рабочий ход (программа Их-1) приемной антенны ретранслятора;
27 - контроль сигнала (программа Их-1);
28 - наведение приемной антенны ретранслятора на источник сигнала по азимуту;
29 - программное наведение передающей антенны ретранслятора на абонентскую станцию по углу места;
30 - программное наведение передающей антенны ретранслятора на абонентскую станцию по азимуту.
Здесь программа Рх-1 обозначает программу первого хода приемной антенны - рабочий ход, а программа Их-1 - программу первого хода - измерительный ход.
На фиг.2 показаны известные штатные режимы наведения антенн ретранслятора, а также новые дополнительные режимы, использование которых позволило обеспечить получение указанного технического результата.
Блок-схема отражает последовательность режимов и их взаимосвязь.
При установке и вводе ретранслятора в эксплуатацию производится его начальная выставка. При этом обычно при помощи шайб и прокладок, а также измерительных средств (уровень, теодолит) осуществляется выставка азимутальных осей антенн перпендикулярно горизонтальной плоскости. Взаимная привязка азимутальных систем (нулевых азимутальных отсчетов) приемной и передающей антенн производится при изготовлении ретранслятора с помощью посадочных штифтов, если используется общее основание для обеих антенн. При раздельных основаниях антенн их азимутальная привязка осуществляется при установке ретранслятора с помощью теодолита и технологических зеркал.
Предложенный способ передачи информации реализуется следующим образом.
После подачи на ретранслятор питания осуществляют известный штатный режим 18 (фиг.2) - программное наведение приемной антенны 1 ретранслятора на источник сигнала по углу места.
Программное наведение по углу места приемной и передающей антенн 1 и 3 ретранслятора (фиг.1) проводят на рассчитанные от горизонтальной плоскости углы. Эти углы вводят в вычислительное устройство 14 ретранслятора при изготовлении ретранслятора или при его установке с помощью устройства 15 ввода данных.
В рассматриваемом примере ретранслятора, приведенном на фиг.1, при точном наведении приемной антенны 1 ретранслятора на источник сигнала используется экстремальный метод наведения, который не требует дополнительных аппаратурных затрат. Для реализации точного наведения приемной антенны 1 на источник сигнала используют блок 5 и вычислительное устройство 14.
Разворот приемной антенны 1 вокруг угломестной оси 8 проводят с помощью блока 9, управляемого от вычислительного устройства 14.
В предлагаемом способе используется дискретное (пошаговое) сканирование приемной антенны 1 и передающей антенны 3. Оно может быть реализовано с помощью шагового мотора или двигателя, управляемого дискретными сигналами.
В предлагаемом изобретении в угломестном и азимутальном приводах приемной антенны 1 и передающей антенны 3 применяется шаговый мотор. Эти приводы обеспечивают требуемые точность и быстродействие, имеют малые массу и габариты, простую схему управления приводом и измерения угла.
Использование шагового мотора позволяет при эксплуатации обеспечить механическую фиксацию положения антенны. При этом снижается электропотребление за счет отключения электропитания от систем управления антеннами.
Преимущества использования шагового мотора по сравнению с винтовой передачей, которая широко применяется в станциях спутниковой связи, заключается в более высоком быстродействии, а также в отсутствии ограничения по углу при автоматическом наведении по азимуту.
Существенным преимуществом шаговых моторов применительно к предлагаемому изобретению является возможность гибкого управления движением антенны (реверс, остановка). Кроме того, в предлагаемом способе погрешность измерения сигнала, обусловленная дискретным перемещением приемной антенны 1, уменьшается благодаря использованию линеаризации.
В рассматриваемом примере ретранслятора суммарную погрешность программного наведения приемной антенны 1 по углу места на КА находят по формуле:

где ΔГП - ошибка негоризонтальности, ΔКА - ошибка положения КА, ΔПО - приборная ошибка (отработки угла).
Приборную ошибку привода с шаговым мотором определяют по формуле:

где ΔШС - ошибка шагового сканирования (дискретности), ΔЗП - ошибка изготовления зубчатой передачи (шагового мотора и редуктора), ΔШО - ошибка выставки нуля шагового мотора относительно базовой плоскости.
Для рассматриваемого примера ретранслятора выбран шаг перемещения приемной антенны 1 и передающей антенны 3 по азимуту и по углу места - 6 угловых минут. Ошибка ΔШС равна половине шага, т.е. 3 угловым минутам.
Приняты следующие значения ошибок: ΔЗП=4 угловые минуты, ΔШО=3 угловые минуты.
При этом погрешность ΔПО составляет 5,8 угловых минут.
Приняты ΔГП=2 угловые минуты и ΔКА=6 угловых минут, при этом погрешность ΔУМКА составляет 8,6 угловых минут. Это существенно меньше допустимой погрешности (24 угловые минуты).
После окончания режима 18 (фиг.2) осуществляют штатный режим 19 - разворот приемной антенны ретранслятора по азимуту.
В прототипе после поиска и захвата сигнала точное наведение антенны на максимум сигнала осуществляется с помощью экстремального метода. Для рассматриваемого примера ретранслятора проводится анализ точности наведения антенны на источник сигнала при использовании экстремального метода с учетом потерь сигнала в атмосфере.
При работе в КU-диапазоне в условиях сильного ливня потери сигнала в атмосфере по мощности превышают 10-20 дБ. В условиях затяжного дождя потери по мощности не превышают 2-4 дБ. Для приемного канала рассматриваемого примера ретранслятора принимается время измерения сигнала - 1 секунда, время переброса приемной антенны 1 из одного положение в другое - 0,4 секунды, погрешность от шума по уровню 3б при максимальном сигнале (без учета потерь) составляет 0,5·10-2 от сигнала (по напряжению), при максимальном сигнале (с учетом потерь) - 1·10-2 сигнала. Допустимое уменьшение принимаемого сигнала из-за потерь в атмосфере при осадках принимается по мощности 6 дБ (по напряжению в 2 раза).
Приемный канал рассматриваемого примера ретранслятора в режиме экстремального наведения имеет погрешность дискретности преобразования измеряемого сигнала в цифровой сигнал 0,5·10-2 от максимального сигнала (с учетом потерь). Кроме того, имеется случайная погрешность, обусловленная нестационарными потерями сигнала в атмосфере (осадки, туман). В предложенном способе она учитывается в общей погрешности от потерь сигнала в атмосфере при осадках в виде дополнительного запаса на случайный разброс.
Суммарную случайную погрешность измеряемого сигнала (по напряжению) находят по формуле:

где ΔUш - погрешность от шума, Δд - погрешность дискретности преобразования сигнала.
Погрешность ΔUш определяется полосой частот принимаемого сигнала, погрешность Δд - выбранным дискретом преобразования. Поэтому погрешности ΔUш, Δд и ΔUсс не зависят от величины измеряемого сигнала.
При минимальном допустимом значении принимаемого сигнала погрешность ΔUсс равна 1,1·10-2 Uсм, где Uсм - величина принимаемого сигнала, соответствующая максимуму диаграммы направленности приемной антенны 1.
Ошибку определения азимута Азм, соответствующего максимуму принимаемого сигнала, при использовании экстремального метода наведения находят по формуле:

где S - крутизна диаграммы направленности в рабочей области (в пределах ± 0,2_ϕДН от Азм).
Для рассматриваемого примера  .
.
Ошибка ΔАзм составляет 0,026 ϕДН.
Затем производят наведение оптической оси антенны на КА. При этом максимальная ошибка операции дна составляет половину шага, что соответствует 0,025 ϕДН.
Суммарная ошибка наведения оптической оси антенны на КА по азимуту определяют по формуле:

Она составляет 0,036 ϕДН или 4,3 угловых минут.
При эксплуатации ретранслятора к этой ошибке начального наведения антенны на КА добавляется ошибка положения КА, т.е. зона возможного перемещения КА, которая составляет для рассматриваемого примера 12 угловых минут (0,1 ϕДН).
Поэтому ошибка начального наведения антенны на КА (при суммарной допустимой ошибке ± 0,2 ϕДН) должна не превышать 0,1 ϕДН. С запасом ее следует брать (0,06-0,08) ϕДН. Поскольку ошибка наведения из-за потерь в атмосфере ΔПА является систематической ошибкой, то суммарная ошибка начального наведения является алгебраической суммой ΔПА и ΔАЗНА. Следовательно, допустимая ошибка ΔПА должна составлять (0,024-0,044) ϕДН.
Принимается допустимая ошибка ΔПА=0,034 ϕДН.
При использовании экстремального метода наведения антенны ошибку ΔПА определяют с помощью формулы:

где Δ UПА - разность двух сигналов, обусловленная потерями сигнала в атмосфере.
Для рассматриваемого примера допустимая величина Δ UПА равна 2,04·10-2 Uсм.
Для нахождения Δ UПА используют формулу:

где Δ tи - время измерения сигнала, Δ tд - время движения антенны из одного положения в другое, V - средняя скорость изменения сигнала Uc из-за потерь в атмосфере за интервал времени (Δ tи+Δ tд).
В рассматриваемом примере для Δ tи=1 с, Δ tд=0,4 с при допустимой величине Δ UПА=2,04·10-2 Uсм допустимая максимальная скорость V равна 1,46·10-2 Uc/c.
Следовательно, при скорости изменения сигнала из-за потерь в атмосфере выше указанной, погрешность наведения антенны на КА по азимуту при эксплуатации превышает требуемую величину.
Возможно применение метода наведения антенны на источник сигнала с одновременным измерением сигналов, разность которых используется для нахождения ошибки наведения антенны. В частности, могут быть использованы дополнительно две рупорные антенны для наведения антенны по азимуту. Недостатки этого метода: увеличение массы аппаратуры на 8-20 кг, электропотребления и особенно существенно -габаритов.
Изобретение позволяет значительно повысить точность начального азимутального наведения антенн ретранслятора в условиях потерь радиосигнала в атмосфере при обеспечении массы и габаритов таких же, как и при использовании экстремального метода.
В предложенном способе азимут, соответствующий максимуму принимаемого сигнала Ucм, находят при азимутальном движении приемной антенны 1 с измерением ее углового положения и величины сигнала с помощью формулы:
где Аз1 и Аз2 - значения азимута, соответствующие одинаковой величине сигнала, которая равна заданному пороговому значению.
Уменьшение погрешности, вызванной потерей сигнала в атмосфере, обеспечивается благодаря выбору порогового значения сигнала на крутом участке диаграммы направленности приемной антенны 1.
Максимальное значение сигнала, поступающего на вход вычислительного устройства 14 (без учета потерь в атмосфере при осадках), имеет разброс, обусловленный начальным разбросом параметров источника сигнала и приемного канала ретранслятора, а также уходом параметров при эксплуатации. Если принять нижнее значение максимума сигнала Uсм как номинальную величину Uсмн, то наибольшее значение Uсм, которое обозначается maxUсм, больше Uсмн на указанную зону разброса и уходов параметров.
Для рассматриваемого в качестве примера ретранслятора принимается max Uсм=1,1 Uсмн.
При максимальных допустимых потерях сигнала в атмосфере наименьшее допустимое значение максимума сигнала обозначаетсям min Uсм.
Для рассматриваемого примера ретранслятора min Uсм=0,5 Uсмн.
Предлагаемый способ позволяет обеспечить требуемую точность азимутального наведения приемной антенны 1 и передающей антенны 3 для заданного разброса максимума сигнала Uсм, а также для заданного максимально допустимого значения средней скорости ухода сигнала из-за потерь в атмосфере - Vд. Таким образом, предлагаемый способ может быть реализован при следующих ограничениях:

Особенность определения средней скорости изменения сигнала из-за потерь в атмосфере заключается в том, что оно может быть проведено за измерительный интервал времени (по разности начального и конечного значений сигнала) для неподвижной антенны или при возвращении антенны в начальное положение.
Для обеспечения фиксации порогового значения сигнала на крутом участке диаграммы направленности при сравнительно высокой скорости изменения сигнала из-за потерь в атмосфере вводят перестройку порогового значения.
Из-за значительного разброса максимума сигнала в предлагаемом способе используют две программы первого хода приемной антенны 1:
Рх-1 - первый ход - рабочий;
Их-1 - первый ход - измерительный.
Здесь первый ход приемной антенны 1 - это ее первый разворот в заданном направлении до реверса после уменьшения величины принимаемого сигнала до порогового значения.
Программу Рх-1 реализуют при относительно небольших потерях сигнала, когда максимум сигнала Uсм больше заданного граничного значения Uсмг. Программу Их-1 осуществляют для условия minUсм≤Uсм≤Uсмг.
Результаты измерительного хода используют для перестройки порогового значения -уменьшения его величины.
Разворот приемной антенны 1 по азимуту для захвата сигнала, принимаемого от КА, может составить полный круг. Захват сигнала фиксируют по превышению величины сигнала заданного первого порогового значения. Это пороговое значение выбирают таким, чтобы оно было меньше наименьшего максимума сигнала и больше, чем максимальная величина сигнала от бокового лепестка диаграммы направленности приемной антенны 1. Таким образом обеспечивают защиту от ложного захвата сигнала.
Первое пороговое значение сигнала выбирают исходя из реализации программы Рх-1, при которой первый ход приемной антенны 1 является рабочим. Это позволяет уменьшить время осуществления предложенного способа, поскольку вероятность потерь сигнала в атмосфере, при которых величина Uсм меньше Uсмг, сравнительно невелика.
Крутой участок диаграммы направленности должен выбираться по относительной крутизне, которая для текущего значения сигнала Uci определяется по формуле:

где ΔАз и ΔUci - изменение азимута и сигнала Uci соответственно.
Абсолютная крутизна находится по формуле:

Снижение Uci позволяет уменьшить угловую ошибку ΔАз при относительном изменении сигнала из-за потерь.
Максимальное значение относительной крутизны So соответствует диапазону (0,25-0,45) Uсм.
При реализации режима 19 (фиг.2) разворот приемной антенны 1 (фиг.1) по азимуту в заданном направлении проводят дискретно с измерением сигнала до первого превышения сигнала заданного первого порогового значения. Если величина при начальном измерении сигнала больше первого порогового значения, то сначала осуществляют разворот приемной антенны 1 по азимуту в обратном направлении (реверс), а затем в заданном направлении, после уменьшения сигнала до величины, меньшей первого порогового значения. Вероятность реверса для рассматриваемого примера ретранслятора составляет менее 0,01.
При проведении режима 19 (фиг.2), при движении приемной антенны 1 (фиг.1) с помощью вычислительного устройства 14 производят фиксацию углового положения приемной антенны 1 и измерения сигнала с заданной частотой. В ретрансляторах, в приводах которых применяют шаговые моторы, угловое положение приемной антенны 1 определяют по количеству подаваемых на привод импульсов. Частота измерения (опроса) сигнала, поступающего на вычислительное устройство 14 от блока 5 наведения приемной антенны, выбирается исходя из конкретной аппаратурной реализации ретранслятора. При этом для каждого дискретного положения (шага) приемной антенны 1 проводят осреднение сигнала. Поэтому период обновления сигнала равен времени одного шага.
Время измерения сигнала (на одном шаге) - Δtu и величину шага - Δ Азш выбирают такими, чтобы разность соседних сигналов (соседних шагов) с заданным запасом превышала ошибку измерения сигнала в диапазоне (0,2-0,8) максимального значения сигнала. Кроме того, ошибка дискретности по углу, равная половине шага, должна быть в 4-10 раз меньше суммарной ошибки наведения.
Для рассматриваемого примера ретранслятора угловая скорость перемещения обеих антенн составляет 1 градус/с, величина шага - 6 угловых минут, время измерения сигнала на одном шаге - 0,1 с.
Суммарную случайную ошибку сигнала при времени измерения Δtu находят с помощью формулы (3). При этом погрешность от шума меняется обратно пропорционально √Δtu, a погрешность дискретности преобразования от времени измерения не зависит.
Для рассматриваемого примера ретранслятора максимальное значение сигнала от бокового лепестка приемной антенны 1 меньше максимума сигнала основного лепестка по мощности на 13 дБ (по напряжению в 4,5 раза).
При наибольшем максимуме сигнала maxUсм=1,1 Uсмн максимальный сигнал от бокового лепестка составляет Uбл=0,24 Uсмн.
Для рассматриваемого примера ретранслятора берется граничное значение Uсмг=0,8 Uсмн, при этом среднее значение максимума сигнала в диапазоне (0,8-1,1) Uсмн равно 0,95 Uсмн. Ему соответствует диапазон максимальной относительной крутизны диаграммы направленности (0,33±0,1) Uсмн.
Выбирают первое пороговое значение сигнала Uп1=0,33 Uсмн. При этом выполняются условия Uп1>Uбл и Uп1<minUсм.
Для времени измерения Δtu=0,1 с и принятой величины ошибки ΔUш=0,5·10-2 Uсмн (при Δtu=1 с) определяют ΔUш=1,58·10-2 Uсмн. С учетом ошибки Δд=0,25·10-2 Uсмн из формулы (3) находят ΔUcc=1,6·10-2 Uсмн. Это соответствует 4,8·10-2 Uп1.
Осреднение сигнала для уменьшения случайной ошибки используют для всех интервалов времени измерения сигнала, используемых в данном способе.
Величина ошибки определена по уровню 3σ при нормальном законе распределения ошибки. Она существенно меньше разности соседних сигналов ΔUсш, которая при Uc=Uп1 и minUcм=0,5 Uсмн составляет (0,1-0,14) Uп1.
Случайная ошибка разности двух сигналов Δср равна ΔUсс√2. Для рассматриваемого примера она составляет 2,2·10-2 Uсмн.
При первом превышении сигнала первого порогового значения во время движения приемной антенны 1 в заданном направлении осуществляют дополнительный режим 20 (фиг.2) - определение скорости изменения сигнала.
При этом производят остановку приемной антенны 1 (фиг.1), измерение сигнала и определение средней скорости изменения сигнала в течение заданного первого интервала времени Δtu1.
Для нахождения средней скорости изменения сигнала V и ошибки ее определения ΔV на расчетном интервале времени Δtp используют формулы:


где ΔUc - разность сигнала в начале и конце интервала Δtp, Δcр - ошибка разности сигнала ΔUc, Δtoe - время осреднения сигнала.
Первый интервал времени находят исходя из допустимой ошибки определения скорости изменения сигнала.
Для всех интервалов времени с осреднением сигнала принимают линейную модель изменения сигнала из-за потерь в атмосфере. Поэтому начальное и конечное значения сигнала ΔUc соответствуют середине интервала Δtoc.
Соотношение интервала Δtoc и расчетного интервала времени выбирают исходя из конкретных параметров ретранслятора. Для рассматриваемых ретрансляторов это соотношение составляет 0,25-0,35.
В данном режиме в вычислительном устройстве 14 определяют скорость V1 с помощью формулы (12) при Δtp=Δtu1 и Δtoc=Δtoc1.
В вычислительное устройство 14 при изготовлении ретранслятора вводят значения Δtu1, Δtoc1, а также ошибку ΔV1, рассчитанную по формуле (13) для Δtp=Δtu1, Δtoc=Δtoc1 и значение найденной ошибки Δср=Δср1.
Запрет наведения осуществляют, если скорость V1 больше допустимого значения.
После окончания интервала времени Δtu1 продолжают разворот приемной антенны 1 в заданном направлении, если величина сигнала за время Δtu1 уменьшилась до величины меньше Uп1. Если же величина сигнала больше Uп1, то сначала осуществляют разворот приемной антенны 1 в обратном направлении до уменьшения сигнала до величины, меньшей Uп1 в заданных пределах. Разность между Uп1 и величиной сигнала, при которой осуществляют остановку и реверс приемной антенны 1, должна обеспечить защиту от сбоя при обратном переходе первого порогового значения. Для рассматриваемых ретрансляторов это реализуют с помощью разворота приемной антенны 1 на один дополнительный шаг. После этого производят разворот приемной антенны 1 в заданном направлении.
При последующем превышении измеряемого сигнала первого порогового значения во время движения приемной антенны 1 в заданном направлении осуществляют дополнительный режим 21 (фиг.2) - определение первого азимута, соответствующего пороговому значению сигнала.
При этом производят остановку приемной антенны 1 (фиг.1), измерение сигнала Uci в течение заданного второго интервала времени, а также определение и ввод в вычислительное устройство 14 азимута приемной антенны Aзi.
Значение Δtu2 выбирают исходя из допустимой случайной ошибки определения азимута, соответствующего первому пороговому значению сигнала, и вводят в вычислительное устройство 14 при изготовлении ретранслятора.
Азимут Aз1, соответствующий первому пороговому значению сигнала, в вычислительном устройстве 14 определяют с помощью формулы:

Найденное значение Aз1 фиксируют в вычислительном устройстве 14.
Затем проводят режим 22 (фиг.2) - определение граничного значения сигнала.
Для рассматриваемых ретрансляторов граничное значение Uсг вводят для фиксации пологого участка диаграммы направленности и изменения метода обработки сигналов. Его находят при вычитании сигнала, соответствующего режиму 21 (фиг.2), из сигнала, получаемого при развороте приемной антенны 1 (фиг.1) на заданное количество шагов. Найденную в вычислительном устройстве 14 с помощью формулы (11) по указанной разности абсолютную крутизну SA сравнивают с опорными значениями, введенными при изготовлении ретранслятора. Эти опорные значения (например, 5-15) приведены к одному масштабу Uсм=Uсмн и привязаны к соответствующему максимуму сигнала. Например, в рассматриваемом примере ретранслятора при Uсм=0,8 Uсмн
SA=0,15 Uсм/0,1 ϕДН=0.12 Uсмн/0,1 ϕДН, а при Ucm=0,5 Uсмн
SA=0,1 Uсм/0,1 ϕДН=0,05 Uсмн/0,1 ϕДН.
Для повышения точности определения SA и Uсг используют среднее значение заданного количества измерений.
Для промежуточных найденных величин SA выбор Uсм в вычислительном устройстве 14 проводят с использованием линейной зависимости отклонений ΔSA и ΔUсм.
Запрет на наведение вводят, если найденная величина SA меньше минимального опорного значения.
В рассматриваемом примере ретранслятора при Uсм=0,8 Uсмн при развороте приемной антенны 1 на четыре шага разность сигналов составляет 0,24 Uсмн. При времени измерения Δtи=0,1с ошибка определения разности сигналов равна 2,2·10-2 Uсмн, что составляет 9,2% от разности сигналов. При Uсм=0,5 Uсмн эта ошибка равна 22%. В рассматриваемом примере ретранслятора устанавливают интервал Δtи2=0,4с и используют среднее значение сигналов при перемещении приемной антенны 1 на 3, 4, 5 и 6 шагов. При этом ошибка определения абсолютной крутизны уменьшается вдвое.
Для диапазона 0,8 Uсмн<Uсм≤1,1 Uсмн используют опорные значения SA, соответствующие Uсм=0,8 Uсмн; 0,85 Uсмн; 0,9 Uсмн; 0,95 Uсмн; 1,0 Uсмн; 1,05 Uсмн; 1,1 Uсмн.
Граничное значение Uсг устанавливают равным 0,8 Uсм. С учетом погрешностей, обусловленных уходом сигнала, случайной ошибкой и дискретностью измерений, величина Uсг находится в диапазоне (0,82-0,94) Uсм.
Для диапазона 0,5 Uсмн≤Uсм≤0,8 Uсмн используют опорные значения SA, соответствующие Uсм=0,5 Uсмн; 0,6 Uсмн; 0,7 Uсмн. Граничное значение устанавливают равным 0,8 Uсм.
После окончания режима 22 (фиг.2) проводят режим 23 - определение контрольного значения азимута приемной антенны ретранслятора.
При ее развороте в заданном направлении в вычислительном устройстве 14 (фиг.1) определяют разность текущего и предшествующего значений сигнала, а также производят сравнение текущего сигнала с найденным граничным значением. Для первого текущего сигнала (i=1) предшествующим сигналом является последний сигнал, используемый при определении граничного значения сигнала. При этом, пока значение сигнала меньше граничного значения, отрицательную разность текущего и предшествующего значений сигнала в вычислительном устройстве 14 фиксируют как сбой, после которого осуществляют реверс приемной антенны 1 с повторным измерением двух указанных значений сигнала. Разворот приемной антенны 1 продолжают после фиксации одного сбоя и последующей положительной разности текущего и предшествующего значений сигнала.
При превышении измеряемого сигнала граничного значения разность текущего и предыдущего значений сигнала определяют при перемещении приемной антенны 1 на два шага. Разворот приемной антенны 1 продолжают, если положительную разность текущего и предшествующего значений сигнала фиксируют заданное количество раз. Если заданное количество раз фиксируют отрицательную разность текущего и предшествующего значений сигнала, то осуществляют остановку приемной антенны 1 на заданный третий интервал времени, фиксируют данное контрольное значение азимута приемной антенны 1, соответствующее прохождению максимума сигнала Uсм.
В этом положении приемной антенны 1 проводят измерения сигнала, которые используют для определения средней скорости V изменения сигнала, максимума сигнала, программы первого хода приемной антенны 1 - рабочий ход (Рх-1) или измерительный ход (Их-1), а также второго порогового значения при первом измерительном ходе.
На фиг.3 приведена блок-схема подпрограммы определения контрольного значения азимута приемной антенны 1 (фиг.1). Блок-схема подпрограммы дана для рассматриваемого примера ретранслятора при использовании программы Рх-1. В вычислительном устройстве 14 с помощью операции 31 (фиг.3) проводят измерение текущего значения сигнала Uci, поступающее с блока 5 (фиг.1). С помощью операции 32 (фиг.3) производят сравнение Uci с граничным значением Uсг.
При выполнении в данной операции условия:

продолжают пошаговый разворот приемной антенны 1 (фиг.1) со временем шага Δtu. При этом находят разность ΔUci текущего и предшествующего значений сигнала (операция 33, фиг.3).
Затем проводят операцию сравнения 34.
Если при этом выполняется условие

то продолжают пошаговый разворот приемной антенны 1 (фиг.1) с проведением операций 33 и 34 (фиг.3).
При увеличении измеряемого сигнала Uc вероятность сбоя при определении разности сигналов ΔUсi возрастает. Это обусловлено тем, что величина ΔUci уменьшается из-за уменьшения крутизны диаграммы направленности, а случайная ошибка измерений от величины сигнала не зависит.
Для повышения помехозащищенности при определении ΔUci используют повторные измерения. При этом существенно то, что среднее время проводимых операций увеличивается незначительно, поскольку вероятность повторного измерения мала.
С учетом возможного повторения измерений задают допустимую вероятность сбоя РСД, причем:

где РСД1 - допустимая вероятность сбоя при одном определении ΔUci.
При определении ΔUci должны выполняться ограничения:


где РСБ - вероятность сбоя с учетом повторного определения ΔUci, РСБ1 - вероятность сбоя при одном определении ΔUci.
Для пологого участка диаграммы направленности (±0,2 ϕДН относительно Азм) в рассматриваемых ретрансляторах вероятность сбоя с учетом повторного измерения превышает допустимую величину. Поэтому кроме повторных измерений, увеличивают разность сигналов за счет разворота приемной антенны 1 (фиг.1) на два шага.
В рассматриваемом примере ретранслятора для Uсм=0,8 Uсмн задается РСД1=3,2·10-2. При этом допустимая вероятность двух сбоев РСД равна 10-3. Случайная ошибка разности сигналов Δср равна 2,2·10-2 Uсмн (по уровню 3σ) при ошибке измерения ΔUcc=1,6·10-2 Uсмн. Уход сигнала ΔUСПА при скорости изменения V=0,04 Uс/c и Δtu=0.1c составляет 4·10-3 Uc.
Первая разность сигналов при i=1 (без учета ухода сигнала) равна 5·10-2 Uсмн. С учетом ухода сигнала ΔUСПА=1,3·10-3 Uсмн вероятность сбоя и повторного измерения равна 2·10-7. Это значительно меньше РСД, поэтому повторное измерение ΔUc не требуется.
Для граничного значения Uсг=0,9 Uсм предшествующий сигнал равен 0,87 Uсм. Разность сигналов равна ΔUc=3·10-2 Uсм=2,4·10-2 Uсмн, уход сигнала составляет 3·10-3 Uсмн.
Вероятность сбоя при этом равна 2·10-3. Она меньше PСД1, но больше РСД. В данном случае должно быть предусмотрено повторное измерение.
Если при проведении операции 34 (фиг.3) условие (16) не выполняется, то проводят операцию 35. При этом осуществляют повторное измерение сигнала с возвращением приемной антенны 1 (фиг.1) в предшествующее положение, а затем повторное измерение сигнала в текущем положении приемной антенны 1, после чего находят разность этих сигналов ΔUci. Если при операции сравнения 36 (фиг.3) условие (16) не выполняется, то осуществляют переход к более помехозащищенному методу с измерением разности сигналов при развороте приемной антенны 1 (фиг.1) на 2 шага (операция 37, фиг.3) и с прекращением операции 33.
Если при проведении операции сравнения 36 условие (16) выполняется, то продолжают разворот приемной антенны 1 (фиг.1) по азимуту.
Если при проведении операции 32 (фиг.3) условие (15) не выполняется, то осуществляют операцию 37, при которой разность двух измеряемых сигналов Ucj и Uc(j-1) определяют при развороте приемной антенны 1 (фиг.1) на два шага.
В соответствии с командой (результат «нет», операция 32, фиг.3) прекращают операцию 33 и проводят операцию 37. При этом первое измеряемое значение (j=1) получают путем разворота приемной антенны 1 (фиг.1) на один шаг после прекращения операции 33 (фиг.3). В качестве предшествующего сигнала берут ранее зафиксированный в вычислительном устройстве 14 (фиг.1) сигнал, который предшествовал сигналу Uci.
При следующем шаге приемной антенны 1 определяют разность данного сигнала и сигнала Uci (операция 39, фиг.3).
Если при проведении операции 38 сравнения выполняется условие:

а также это условие выполняется для второго шага при операциях 39 и 40, то разворот приемной антенны 1 (фиг.1) продолжают. Команду на это формируют с помощью операции совпадения И (операция 41, фиг.3).
Если условие (20) не выполняется для первой и второй разности ΔUcj, то с помощью операции И (операция 42) формируют команду на остановку приемной антенны 1 (фиг.1) в положении, соответствующем первому шагу, на заданный третий интервал времени, а также фиксируют данное контрольное значение азимута Азк приемной антенны 1, соответствующее прохождению максимума сигнала (операция 43, фиг.3).
На фиг.3 показана блок-схема подпрограммы для программы Рх-1 рассматриваемого примера ретранслятора. В данном случае осуществляют сравнение результатов измерений для двух разворотов приемной антенны 1 (фиг.1) на один шаг. При использовании программы первого хода Их-1 (minUcм≤Uсм≤Uсмг) сравнение могут проводить для большего количества измерений. Это количество зависит от вероятности сбоя при проведении операции 37 (фиг.3).
Если первая и вторая разность сигналов ΔUcj имеют разный знак, то дополнительно проводят повторное измерение сигналов и определение их разности для положений приемной антенны 1 (фиг.1), соответствующих зафиксированным сигналам Ucj при j=(i+1) и Uc(j-1) при (j-1)=(i-1), т.е. при развороте на первый шаг. Включение этого измерения производят с помощью операций 44 и 45 - НЕ (инверсия) (фиг.3) и операций 46 и 47 - И. После определения разности сигналов ΔUcj (операция 48), производят операцию 49 сравнения.
Если для двух разностей выполняется условие (20), то осуществляют разворот приемной антенны 1 (фиг.1) по азимуту в заданном направлении. Если условие (20) дважды не выполняется, то производят остановку приемной антенны 1 в положении, соответствующем первому шагу, и фиксируют контрольное значение азимута.
В общем случае, если используют последовательный разворот приемной антенны 1 на один шаг заданное количество раз, то ее разворот продолжают, если фиксируют положительную разность текущего и предшествующего значений сигнала указанное заданное количество раз. Если заданное количество раз фиксируют отрицательную разность текущего и предшествующего значений сигнала, то осуществляют остановку приемной антенны 1 в положении, соответствующем первому шагу, и фиксируют контрольное значение азимута.
Если при указанном развороте приемной антенны фиксируют разнополярные разности текущего и предшествующего значений сигнала, то проводят повторные измерения с реверсом приемной антенны для ее положения, соответствующего развороту на первый шаг, до тех пор, пока количество разностей одного знака станет равным указанному заданному количеству, при этом при положительной разности продолжают разворот приемной антенны, а при отрицательной разности производят ее остановку в положении, соответствующем первому шагу, и фиксируют контрольное значение азимута.
Для рассматриваемого примера ретранслятора на участке диаграммы направленности в пределах ±0,2 ϕДН от Азм разность сигналов для одного шага составляет 1,5·10-2 Uсм. При Uсм=0,8 Uсмн эта разность равна 1,2·10-2 Uсмн. С учетом ухода сигнала ΔUСПА=3·10-3 UСМН вероятность сбоя при этом равна 11,5·10-2 при допустимой величине РСД1=3,2·10-2.
Разность сигналов при развороте приемной антенны 1 на два шага равна 2,4·10-2 UСМН. Случайная ошибка остается прежней: Δср=2,2·10-2 UСМН, ошибка из-за изменения сигнала увеличивается вдвое. Разность сигналов с учетом этой ошибки равна 1,8·10-2 UСМH. Вероятность сбоя при этом равна 7·10-3. Поскольку она больше РСД=10-3, то требуется повторное измерение, которое и проводят для рассматриваемого примера ретранслятора.
В предложенном способе отклонение контрольного значения азимута Азк, характеризующегося значением сигнала UСКА, от Азм не превышает трех шагов с учетом ошибки дискретности (один шаг).
Максимум сигнала определяют с помощью формулы:

где коэффициент ККА имеет среднее значение и случайный разброс, соответствующий по углу ± 1,5 ΔАзш.
Для рассматриваемого примера ретранслятора это соответствует ошибке Δ Uсмк определения Uсм, равной 0,022 Uсм. Коэффициент ККА при этом равен (1,022±0,022).
При контрольном значении азимута по первой величине UСКА при времени измерения Δtи в вычислительном устройстве 14 по формуле (21) определяют максимум сигнала Uсм1 при первом ходе приемной антенны 1.
По найденной величине Uсм1 определяют программу первого хода приемной антенны 1:
Ucm1>Uсмг - программа Рх-1,
minUсм≤Uсм1≤Uсмг - программа Их-1.
Если Uсм1<minUсм, то вводят запрет на наведение.
При контрольном значении азимута в течение заданного третьего интервала времени Δtи3 проводят измерение сигнала при неподвижной приемной антенне 1. Время измерения Δtи3 находят исходя из допустимой погрешности определения средней скорости изменения сигнала из-за потерь в атмосфере, и вводят в вычислительное устройство 14 при изготовлении ретранслятора. Найденную среднюю скорость изменения сигнала V2 используют для определения второго порогового значения при программе Их-1.
Определение второго порогового значения Uп2 в вычислительном устройстве 14 проводят в соответствии с величиной максимума сигнала второго хода приемной антенны 1, который находят по формуле:

где ΔtП - интервал времени между моментами фиксации Ucм1 и Ucм2, которые соответствуют середине интервала времени измерения сигнала. Интервал ΔtП вводят в вычислительное устройство 14 при изготовлении ретранслятора.
Здесь второй ход приемной антенны 1 - это ее разворот в обратную сторону после первого хода до уменьшения величины сигнала до второго порогового значения. Для программы Их-1 второй ход является рабочим ходом.
Если расчетная величина Uсм2 меньше minUсм, то вводят запрет на наведение.
Аналогично первому пороговому значению второе пороговое значение должно находиться в диапазоне (0,25-0,45) Uсм2. Его выбирают равным 0,35 Uсм2. Для рассматриваемых ретрансляторов допустимая ошибка ΔV2 при определении Uсм2 существенно больше, чем допустимая ошибка для реализации первого рабочего хода. Допустимую ошибку ΔV2 и соответствующий интервал Δtи3 определяют из условия минимизации азимутальной ошибки наведения приемной антенны 1 из-за изменения сигнала. Увеличение интервала Δtи3 приводит, с одной стороны, к снижению азимутальной ошибки из-за уменьшения ошибки ΔV2, с другой стороны, - к ее возрастанию из-за увеличения времени рабочего хода. Находят значения Δtи3 и ΔV2, которые обеспечивают минимальную указанную азимутальную ошибку.
В вычислительное устройство 14 при изготовлении ретранслятора вводят значение Δtи3, найденное для первого рабочего хода из формулы (13) для допустимого значения ΔV2 при Δtос=Δtос2 и найденном значении Δср=Δср2.
При контрольном значении азимута в вычислительном устройстве 14 находят среднюю скорость V2 за интервал времени Δtи3 с помощью формулы (12) при Δtр=Δtи3 и Δtос=Δtос2. При первом рабочем ходе приемной антенны 1 также находят среднюю скорость изменения сигнала Vc1 в соответствии с формулой:

При изготовлении ретранслятора в вычислительное устройство 14 вводят ошибку ΔVс1, которую определяют по формуле:

а также допустимую скорость изменения сигнала, которую находят исходя из допустимой азимутальной ошибки наведения приемной антенны 1 при первом рабочем ходе и найденной ошибки ΔVc1.
В режиме 20 (фиг.2) интервал Δtи1 выбирают исходя из условия ΔV1≤0,5 ΔV2, при этом обеспечивается соотношение 0,5 ΔV2<ΔVc1≤0,56 ΔV2. Дальнейшее увеличение интервала Δtи1 нецелесообразно, поскольку возрастает время начального наведения, а ошибка Δ Vc1 уменьшается незначительно.
Найденные скорости Vc1 и V2 используют для запрета наведения, если они больше допустимого значения.
Затем осуществляют режим 24 - определение второго азимута, соответствующего пороговому значению сигнала. При этом для программы первого хода Рх-1 продолжают азимутальный разворот приемной антенны 1 (фиг.1) с заданной скоростью до уменьшения величины сигнала до первого порогового значения. После этого осуществляют остановку приемной антенны 1 и измерение сигнала в течение второго интервала времени, а также определение в соответствии с формулой (14) и ввод в вычислительное устройство 14 азимута Аз2, соответствующего первому пороговому значению сигнала. Два значения азимута (Aз1 и Аз2), соответствующие первому пороговому значению, используют для нахождения азимута Азм, соответствующего максимуму сигнала первого хода в соответствии с формулой (8).
При работе по программе первого хода Их-1 проводят перевод приемной антенны 1 из положения с контрольным значением азимута, соответствующего второму пороговому значению сигнала, с остановкой и измерением сигнала в течение второго интервала времени, а также с определением азимута, соответствующего второму пороговому значению сигнала с помощью формулы (14). Этот азимут является первым азимутом (Аз1), соответствующим данному пороговому значению, для последующего рабочего хода приемной антенны 1.
После окончания режима 24 (фиг.2) осуществляют режим 25 - контроль сигнала (программа Рх-1) или режим 26 - рабочий ход (программа Их-1) приемной антенны ретранслятора. Режим 25 проводят при первом рабочем ходе приемной антенны 1 (фиг.1), а режим 26 (фиг.2) - при первом измерительном ходе.
При реализации режима 25 проводят разворот приемной антенны 1 (фиг.1) в обратную сторону с остановкой и измерением сигнала в течение заданного четвертого интервала времени Δtи4 при контрольном значении азимута. Найденную величину UСКА2 используют для определения средней скорости изменения сигнала Vс2 по формуле:

в которой i=1, j=2, s=1 и ΔtKAi - интервал времени между центрами интервалов Δtи3 и Δtи4. Интервал Δtи4 определяют исходя из допустимой ошибки определения скорости изменения сигнала из-за потерь в атмосфере. Для определения ошибки ΔVс2 скорости Vc2 используют формулу:

где Δcр - ошибка разности сигналов UCKA1 и UCKA2 и Δtр=ΔtKА1.
Параметры Δtи4, ΔtKA1 и ΔVс2 вводят в вычислительное устройство 14 при изготовлении ретранслятора. Найденную скорость Vc2 используют для запрета наведения при первом рабочем ходе, если Vc2 превышает допустимое значение.
При реализации режима 26 (фиг.2) проводят разворот приемной антенны 1 (фиг.1) в обратную сторону с остановками и измерением сигнала при контрольном значении азимута на заданный пятый интервал времени Δtи5, а также при уменьшении сигнала до второго порогового значения на второй интервал времени. Найденную при контрольном значении азимута величину UCKA3 используют для нахождения средней скорости изменения сигнала Vс3 в соответствии с формулой (25), в которой i=2, j=3, s=1 и ΔtKА2 - интервал времени между центрами интервалов Δtи3 и Δtи5. На второй остановке определяют второй азимут Аз2, соответствующий второму пороговому значению сигнала, с помощью формулы (14). Азимуты, соответствующие второму пороговому значению, используют для нахождения азимута, соответствующего максимуму сигнала, в соответствии с формулой (8) при втором ходе приемной антенны 1. Ошибку ΔVс3 скорости Vс3 находят аналогично ΔVс2 по формуле (26), в которой: Δcр - ошибка разности сигналов UCKA1 и UCKA3 и Δtр=ΔtKA2. Интервал Δtи5 определяют исходя из допустимой ошибки ΔVс3. Параметры Δtи5, ΔtKA2 и ΔVс3 вводят в вычислительное устройство 14 при изготовлении ретранслятора. Запрет на наведение вводят, если Vс3 превышает допустимое значение, а также при условии UCKA3<min Uсм.
После окончания режима 26 (фиг.2) осуществляют режим 27 - контроль сигнала (программа Их-1). Его проводят при первом измерительном ходе приемной антенны 1 (фиг.1).
При этом производят разворот приемной антенны 1 в обратную сторону с остановкой и измерением сигнала в течение заданного шестого интервала времени при контрольном значении азимута. Найденную величину UCKA4 используют для определения средней скорости изменения сигнала Vc4 по формуле (25), в которой i=3, j=4, s=3 и ΔtKA3 - интервал времени между центрами интервалов Δtи5 и Δtи6. Ошибку ΔVс4 скорости Vc4 находят аналогично ΔVc2 по формуле (26), в которой: Δcр - ошибка разности сигналов UCKA3 и UCKA4 и Δtp=ΔtKA3. Параметры ΔtKA3 и ΔVс4 вводят в вычислительное устройство при изготовлении ретранслятора. Запрет на наведение вводят, если Vc4 превышает допустимое значение, а также при условии UCKA4<min Uсм.
Найденное для первого или второго хода приемной антенны 1 значение азимута, соответствующего максимуму сигнала, используют при наведении по азимуту приемной антенны 1 на источник сигнала и передающей антенны 3 на абонентскую станцию.
Затем проводят штатный режим 28 (фиг.2) - наведение приемной антенны ретранслятора на источник сигнала по азимуту. При этом приемную антенну 1 (фиг.1) устанавливают в положение, соответствующее максимуму принимаемого сигнала.
Для рассматриваемых ретрансляторов допустимая погрешность наведения приемной антенны 1 и передающей антенны 3 ΔДНА составляет ±0,2 ϕДН. При уходе КА в пределах ±ΔКА допустимая погрешность начального наведения приемной антенны 1 Δднн на КА по азимуту должна соответствовать условию:

где К3 - коэффициент запаса, который выбирают в пределах 0,6-0,8.
Погрешность Δднн включает: случайную погрешность определения Азм-ΔАзмс, погрешность из-за потерь сигнала в атмосфере при осадках - ΔАЗМПА и случайную погрешность операции наведения - ΔНА.
Погрешность ΔНА составляет половину шага приемной антенны 1-1/2 Δ Азш.
Погрешность ΔАзмс в соответствии с формулой (8) находят по формуле:

где ΔАЗС1 и ΔАЗС2 - соответственно случайные погрешности АЗ1 и АЗ2.
Случайную погрешность азимута ΔА3С, соответствующего пороговому значению сигнала Uп, находят по формуле:

где ΔUсс - суммарная случайная погрешность сигнала Uc при Uc=Uп, определяемая из формулы (3), SA - абсолютная крутизна диаграммы направленности при Uc=Uп.
Уходы сигнала из-за потерь в атмосфере при первом рабочем ходе приемной антенны 1 при Uc=Uп1 находят относительно контрольного значения азимута для середины интервала времени Δtи3.
Азимутальную ошибку при первом и втором пересечении первого порогового значения определяют соответственно из следующих формул:


При этом время рабочего хода находят по формуле:

где интервалы времени Δtpx1 и Δtpx2 определяют с помощью формул:


В формулах (33) и (34) Δtд1 и Δtд2 - интервалы времени движения приемной антенны 1 от угла Aз1 до угла Азк и от угла Азк до угла Аз2 соответственно
Погрешность азимута, соответствующего максимуму сигнала, из-за потерь в атмосфере в соответствии с выражением (8) определяют по формуле:

Погрешность определения Азм при первом рабочем ходе находят по формуле:

При первом измерительном ходе приемной антенны 1 погрешность ΔАЗМ при рабочем ходе находят с помощью формул (36), (35), (28), (29). При этом Аз1 и Аз2 соответствуют первому и второму значениям сигнала Uc=Uп2, а вместо формул (30) и (31) используют соответственно формулы:


В этих выражениях Δtрх3 и Δtрx4 находят по формулам:


В формулах (39) и (40) Δtд3 и Δtд4 - время движения приемной антенны 1 от угла Aз1 до угла Азк и от угла Азк до угла Аз2 соответственно.
Наведение приемной антенны 1 на КА по азимуту осуществляют разворотом на рассчитанный угол Азм. Погрешность наведения при этом находят по формуле:

Максимальная погрешность ΔАЗМС соответствует min Uсм.
Для рассматриваемого примера ретранслятора при minUсм=0,5 Uсмн, Δtи=0,1 с, ΔUcc=1,6·10-2 Uсмн, SA=0,06 Uсмн/0,1 ϕДН в соответствии с формулой (28), погрешность ΔАЗМС составляет 2,4 угловых минут, при этом ΔAЗС1=ΔAЗС2=3,2 угловых минут согласно формуле (29).
Введение интервала Δtи2 осреднения сигнала позволяет уменьшить погрешность ΔАЗМС. При Δtи=0,4 с погрешность ΔUcc уменьшается до 0,83·10-2 Uсмн, а погрешность ΔАЗМС - до 1,2 угловых минут.
Дальнейшее увеличение Δtи2 приводит к возрастанию суммарной ошибки ΔАЗМ из-за роста ошибки ΔАЗМПА вследствие увеличения времени рабочего хода.
Для определения расчетного значения интервала Δtи3 при первом рабочем ходе находят допустимую ошибку азимута, соответствующего максимуму сигнала, из-за потерь сигнала в атмосфере ΔАЗМПА с помощью формулы (41).
Суммарную случайную погрешность азимутального наведения приемной антенны 1 на КА в соответствии с (41) находят по формуле:

Для рассматриваемого примера ретранслятора с учетом ΔНА=3 угловые минуты и ΔАзмс=1,2 угловых минут она составляет 3,2 угловых минут. Таким образом, при ΔДНН=8,4 угловых минут допустимая погрешность из-за потерь сигнала в атмосфере ΔАЗМПА составляет 5,2 угловых минут.
При первом рабочем ходе интервал времени Δtд1 равен 2,3 с учетом реверса приемной антенны 1 при остановке (0,6 с), а интервал Δtд2 равен 1,2 с. Принимается разворот приемной антенны 1 от Аз1 до Азм - 14 шагов, от Азм до Аз2 - 15 шагов, отклонение Азк от Азм - 3 шага.
Определение интервала Δtи3 проводят из условия минимизации ошибки ΔАЗМПА. Найденное значение, которое отвечает указанному условию, составляет 2,2 с. Из формул (33) и (34) получают Δtрx1=3,6 с и Δtрx2=2,5 с. При равенстве скоростей изменения сигнала (Vс1=Vc2) ошибки из-за изменения сигнала ΔАЗПА1 и ΔАЗПА2 в соответствии с (30) и (31) относятся так же, как интервалы Δtpx1 и Δtpx2. Для допустимого значения ΔАЗМПА=5,2 угловых минут из формулы (35) находят ошибку ΔАЗПА1=6,2 угловых минут. При относительной крутизне So=(0,37-0,45)Uc/0,1 ϕДН для Uc=Uп1, с учетом разброса Uсм, и Δtрx1=3,6 с уход сигнала из-за потерь в атмосфере составляет (0,195-0,235)Uc. Предельная скорость ухода сигнала Vc1 при этом составляет (5,4-6,5)·10-2 Uc/c.
В соответствии с (3) и (13) для интервала Δtи3 при ΔUш=1,58·10-2 UСМН (для времени Δtи=0,1 с) и ΔД=0,25·10-2 Uсмн находят (при Δtoc=0,7 с):
ΔUcc=0,7·10-2 Uсмн и Δср=1·10-2 Uсмн.
При этом ошибка ΔV2 составляет 0,72·10-2 Uсмн/c или 0,89·10-2 Uc/c при Ucм1=0,8 Ucмн.
Интервал времени Δtи1 выбирают исходя из условия ΔV1≤0,5 ΔV2. Величина сигнала находится в пределах UП1≤Uc<(Uп1+ΔUсш). Принимают Uc=0,38 Uсмн, находят Δtи1=5,4 с, при этом ΔV1=0,43·10-2 Uc/c (при Δtос=1,7 с). Для найденных значений Δtи1 и Δtи3 из (24) определяют ΔVс1=0,49·10-2 Uc/c. Дальнейшее увеличение Δtи1 нецелесообразно, поскольку возрастает общее время начального наведения, а ошибка ΔVс1 уменьшается незначительно (на 4 процента при увеличении Δtи1 на 1 с).
Допустимую скорость изменения сигнала при первом рабочем ходе Vд находят как разность минимальной предельной скорости и ΔVс1. Это обеспечивает реализацию первого рабочего хода приемной антенны 1 при Vc1≤Vд с учетом ошибок измерений. Запас на случайный разброс скорости изменения сигнала обеспечивают тем, что используют минимальную величину предельной скорости, учитывают ΔVс1, а также вводят дополнительно коэффициент запаса, например 0,9. Найденная величина Vд при этом составляет 4,4·10-2 Uc/c.
Допустимую скорость изменения сигнала VД определяют и вводят в вычислительное устройство 14 при изготовлении ретранслятора.
При первом ходе запрет на начальное наведение вводят при V1>VД, V2>VД, Vс1>VД и Vc2>VД.
Предельная скорость изменения сигнала на интервале времени Δtрх2 равна предельной скорости для интервала Δtрx1. Погрешность скорости Vс2, определяемой из формулы (25), находят с помощью формулы (26). Интервал времени ΔtKA1 определяют по формуле:

где 
При определении интервала Δtи4 должно выполняться условие ΔVс2≤ΔVс1. Это позволяет допустимую скорость VД, найденную для интервала Δtpx1, распространить на интервал Δtрх2. Увеличение Δtи4 с целью уменьшения ΔVс2 нецелесообразно, поскольку возрастает время начального наведения при несущественном уменьшении ΔVс2.
Для рассматриваемого примера ретранслятора найденное значение Δtи4 равно 0,2 с, интервал Δtg3 равен Δtg2, при этом ΔtK1=1,5 с и ΔtKA1=4 с. Для времени осреднения Δtи3=2,2 с, ошибка ΔUсс равна 0,43·10-2 Uсмн, для времени осреднения Δtи4=0,2 с, ошибка ΔUсс=1,15·10-2 Uсмн. Ошибка Δср разности сигналов VCKA1 и VCKA2 равна 1,22·10-2 Uсмн. Для Uсм=0,8 Uсмн определяют ошибку ΔVс2=0,38·10-2 Uc/c.
При первом измерительном ходе приемной антенны 1 интервалы Δtи5 и Δtи6 определяют исходя из условия минимизации времени начального наведения, т.е. интервалов Δtрх3 и Δtрx4, а также реализации предельных значений скоростей изменения сигнала Vс3 и Vc4, превышающих предельное значение скорости Vс1.
Для рассматриваемого примера ретранслятора указанные условия обеспечивают при использовании минимальных значений Δtи5=Δtи6=Δtи=0,1 с. Это обусловлено тем, что время второго хода приемной антенны 1 меньше, чем время первого хода.
Из формул (39) и (40) находят Δtpx3=1,45 с и Δtрx4=1,85 с, при этом Δtд3=1,2 с и Δtд4=1,6 с. При равенстве скоростей Vс3 и Vc4 для допустимого значения ΔАЗМПА=5,2 угловых минут находят ошибку ΔАЗМПА1=4,7 угловых минут.
Уход сигнала за время Δtрх3 при So=(0,37-0,45) Uc/0,1 ϕДН составляет (0,14-0,17)Uc. Предельная скорость ухода сигнала Vс3 при этом составляет (9,6-11,7)·10-2 Uc/c. Погрешность скорости Vс3, определяемой из формулы (25), находят с помощью формулы (26). Интервал времени ΔtKA2 определяют аналогично ΔtKA1 как сумму Δtpx2 и Δtрх3. Для времени осреднения Δtи5=0,1 с, ошибка ΔUсс равна 1,6·10-2 Uсмн. Ошибка Δcр разности сигналов UСКА1 и UСKA3 равна 1,65·10-2 Uсмн. Для среднего значения Uсм=0,65 Uсмн, находят Δср=2,54·10-2 Uc и ΔVс3=0,63·10-2 Uc/c.
Предельная скорость изменения сигнала на интервале времени Δtрx4 равна предельной скорости для интервала Δtрх3. Погрешность скорости Vc4, определяемой из формулы (25), находят с помощью формулы (26). Интервал времени ΔtKA3 определяют аналогично ΔtKA1 как сумму интервала Δtрx4 и интервала ΔtK2, который находят по формуле:

При полученных параметрах Δtи6=0,1 с, ΔtКА2=1,85 с и ΔtKA3=3,7 с находят Δcр=2,2·10-2 Uсмн и ΔVс4=0,91·10-2 Uc/c.
Таким образом, предельная скорость изменения сигнала на интервалах Δtpx3 и Δtрx4 с учетом максимальной ошибки ΔVс4 превышает скорость Vc1.
Для рассматриваемого примера ретранслятора при использовании предлагаемого способа требуемая точность наведения приемной антенны 1 (фиг.1) по азимуту на КА обеспечивается при увеличении (по сравнению с прототипом) скорости изменения сигнала из-за потерь в атмосфере в (3-4,4) раз. Скорость увеличилась до (4,4-6,5)·10-2 Uc/c по сравнению с 1,46·10-2 Uc/c.
Ошибка наведения при скорости изменения сигнала (4,4-6,5)·10-2 Uc/c для прототипа увеличивается в 1,9-2,7 раз - с 8,4 угловых минут до (16,4-22,3) угловых минут.
После проведения режима 28 (фиг.2) последовательно осуществляют штатные режимы: 29 - программное наведение передающей антенны ретранслятора на абонентскую станцию по углу места и 30 - программное наведение передающей антенны ретранслятора на абонентскую станцию по азимуту.
Режим 29 проводят аналогично режиму 18.
В рассматриваемом примере ретранслятора суммарную погрешность программного наведения передающей антенны 3 (фиг.1) по углу места на абонентскую станцию находят по формуле:

где ΔН - навигационная ошибка.
При определении местоположения ретранслятора и абонентской станции с помощью спутниковой радионавигационной системы ошибка по координате ΔS в настоящее время составляет 30 м. В ближайшие годы она должна быть уменьшена до 5 м. Угловая ошибка при этом находится по формуле:

где L - расстояние между ретранслятором и абонентской станцией.
Если принять ΔS=5 м и L=6 км, то ошибка ΔН составляет 4 угловые минуты.
Приборную ошибку ΔПО определяют по формуле (2). Погрешность ΔУМAC составляет 7,3 угловых минут.
Режим 30 (фиг.2) проводят аналогично режиму 29.
Суммарную погрешность наведения передающей антенны 3 (фиг.1) на абонентскую станцию по азимуту находят по формуле:

в которой: ΔАЗМС - случайная погрешность азимута, соответствующего максимуму сигнала, определяемая из формулы (28), ΔАЗМПА - систематическая погрешность азимута, соответствующего максимуму сигнала, из-за потерь в атмосфере, определяемая из формулы (35).
При ошибке ΔКА=6 угловых минут, найденных погрешностях ΔН=4 угловые минуты, ΔПО=5,8 угловых минут, ΔАЗМС=1,2 угловых минут и ΔАЗМПА=5,2 угловых минут погрешность ΔАЗАС составляет 14,4 угловых минут. Это существенно меньше допустимой погрешности, которая составляет 24 угловые минуты.
Указанная погрешность ΔАЗАС найдена для режима 30 (фиг.2) при обеспечении требуемой точности азимутального начального наведения (8,4 угловых минут) приемной антенны 1 (фиг.1) при скорости изменения сигнала (4,4-6,5)·10-2 Uc/c.
Для прототипа формула (48) также справедлива. При этом погрешность ΔАЗМС определяют из формулы (4), а погрешность ΔАЗМПА - из формулы (6).
При допустимой скорости изменения сигнала 1,46·10-2 Uc/c, погрешностях ΔАЗМС=3,1 угловых минут и ΔАЗМПА=4,1 угловых минут суммарная погрешность ΔАЗАС составляет 13,6 угловых минут. При скорости изменения сигнала (4,4-6,5)·10-2 Uc/c погрешности ΔАЗМПА и ΔАЗАС, соответственно, составляют 12,1-17,8 угловых минут и 21,6-27,9 угловых минут, погрешность ΔАЗАС увеличивается в 1,6-2,05 раз.
Приведенное описание способа позволяет сделать следующее заключение.
Использование в способе фиксации пороговых значений сигнала на крутом участке диаграммы направленности приемной антенны при ее азимутальном развороте позволяет без дополнительных аппаратурных затрат повысить точность азимутального наведения приемной антенны на КА и передающей антенны на абонентскую станцию в условиях потерь радиотелевизионного сигнала в атмосфере.
При использовании способа требуемая точность наведения приемной антенны на КА по азимуту обеспечивается при увеличении по сравнению с прототипом скорости изменения сигнала из-за потерь в атмосфере в 3-4,4 раза.
При этом ошибка наведения приемной антенны по азимуту на КА уменьшается в 1,9-2,7 раз, а ошибка программного наведения передающей антенны по азимуту на абонентскую станцию уменьшается в 1,6-2,05 раз.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДАЧИ РАДИОТЕЛЕВИЗИОННОГО СИГНАЛА | 2011 |
|
RU2479923C2 |
| СПОСОБ ПЕРЕДАЧИ СИГНАЛА СВЧ | 2008 |
|
RU2374764C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2008 |
|
RU2368077C1 |
| СПОСОБ НАВЕДЕНИЯ ПЕРЕДАЮЩЕЙ АНТЕННЫ РЕТРАНСЛЯТОРА НА АБОНЕНТСКУЮ СТАНЦИЮ | 2005 |
|
RU2308157C1 |
| СПОСОБ ПЕРЕДАЧИ РАДИОТЕЛЕВИЗИОННОГО СИГНАЛА | 2006 |
|
RU2308154C1 |
| СПОСОБ НАВЕДЕНИЯ АНТЕНН РЕТРАНСЛЯТОРА | 2006 |
|
RU2368076C2 |
| СПОСОБ НАВЕДЕНИЯ ПЕРЕДАЮЩЕЙ АНТЕННЫ РЕТРАНСЛЯТОРА | 2007 |
|
RU2328824C1 |
| УСТРОЙСТВО СВЧ-СВЯЗИ | 2005 |
|
RU2309542C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2006 |
|
RU2327181C1 |
| Способ обзорной трехкоординатной двухпозиционной латерационной радиолокации авиационно-космических объектов | 2019 |
|
RU2717970C1 |
Изобретение относится к системам связи и предназначено для передачи информации. Технический результат заключается в повышении точности наведения по азимуту приемной антенны на источник сигнала и передающей антенны на абонентскую станцию в условиях потерь радиотелевизионного сигнала в атмосфере. В способе передачи информации производят наведение приемной антенны ретранслятора на источник сигнала по углу места и азимуту с использованием программного разворота и точного наведения по принимаемому сигналу, а также программное наведение передающей антенны ретранслятора на абонентскую станцию в соответствии с рассчитанными углом места и азимутом. Разворот приемной антенны по азимуту проводят в заданном направлении дискретно и с измерением сигнала. При развороте приемной антенны по азимуту принимаемый радиосигнал меняется в соответствии с диаграммой направленности приемной антенны, при этом определяют азимутальные углы, соответствующие переходу сигнала через заданные пороговые значения. Найденный азимут используют при расчете азимута абонентской станции и наведении по азимуту приемной антенны на источник сигнала и передающей антенны на абонентскую станцию. 3 ил.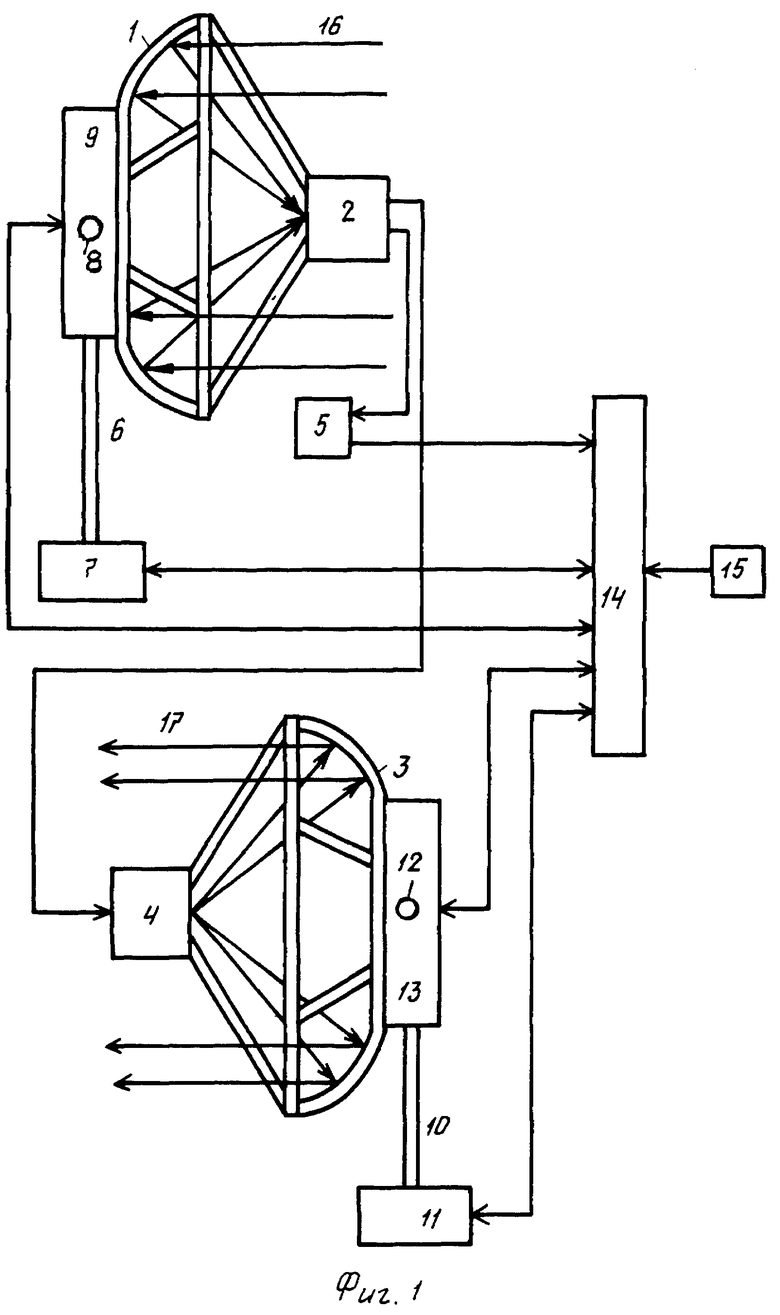
Способ передачи информации, включающий наведение приемной антенны ретранслятора на источник сигнала по углу места и азимуту с использованием программного разворота по углу места и азимуту и точного наведения по принимаемому сигналу, а также программное наведение передающей антенны ретранслятора на абонентскую станцию в соответствии с рассчитанными углом места и азимутом, отличающийся тем, что разворот приемной антенны по азимуту проводят в заданном направлении дискретно с измерением сигнала, при первом превышении сигнала заданного первого порогового значения производят остановку приемной антенны с измерением сигнала и определением скорости изменения сигнала в течение заданного первого интервала времени, после этого при допустимой скорости изменения сигнала продолжают разворот приемной антенны в заданном направлении при конечной величине сигнала первого интервала, меньшей первого порогового значения, до последующего превышения сигнала первого порогового значения, а при конечной величине сигнала, большей первого порогового значения, сначала осуществляют разворот приемной антенны в обратном направлении до уменьшения сигнала до величины, меньшей первого порогового значения в заданных пределах, после чего производят разворот приемной антенны в заданном направлении до последующего превышения сигнала первого порогового значения, после чего осуществляют остановку приемной антенны с измерением сигнала в течение заданного второго интервала времени, определяют с использованием измеренного сигнала и фиксируют в вычислительном устройстве ретранслятора азимут приемной антенны, соответствующей первому пороговому значению сигнала, после чего из данного фиксированного положения приемную антенну разворачивают на заданное количество шагов, при этом для группы сигналов, соответствующих последним соседним шагам, определяют среднее значение, которое вместе с сигналом, измеренным в указанном фиксированном положении, используют для нахождения абсолютной крутизны диаграммы направленности приемной антенны и определения граничного значения сигнала путем сравнения найденной абсолютной крутизны диаграммы направленности приемной антенны с заданными опорными значениями, затем продолжают разворот приемной антенны по азимуту, при котором в вычислительном устройстве определяют разности текущего и предшествующего значений сигнала, а также производят сравнение текущего сигнала с найденным граничным значением сигнала, при этом пока значение сигнала меньше граничного значения разворот приемной антенны продолжают при фиксации положительной разности указанных сигналов, а при отрицательной разности текущего и предшествующего значений сигнала, которую фиксируют как сбой, осуществляют реверс приемной антенны с повторным измерением двух указанных значений сигнала, причем разворот приемной антенны продолжают после фиксации одного сбоя и последующей положительной разности текущего и предшествующего значений сигнала, при фиксации двух сбоев подряд, а также при превышении измеряемого сигнала граничного значения разность текущего и предыдущего значений сигнала определяют при развороте приемной антенны на два шага, при этом разворот приемной антенны продолжают, если при последовательном ее развороте на заданную группу шагов фиксируют положительную разность текущего и предшествующего значений сигнала заданное количество раз, равное количеству шагов в группе, а если указанное заданное количество раз фиксируют отрицательную разность текущего и предшествующего значений сигнала, то осуществляют остановку приемной антенны в положении, соответствующем первому шагу данной группы, на заданный третий интервал времени, фиксируют данное контрольное значение азимута приемной антенны, характеризующее прохождение максимума сигнала по изменению полярности разности текущего и предшествующего значений сигнала, если при указанном развороте приемной антенны фиксируют разнополярные разности текущего и предшествующего значений сигнала, то проводят повторные измерения текущего и предшествующего значений сигнала с реверсом приемной антенны для ее положения, соответствующего первому шагу указанной группы шагов до тех пор, пока количество разностей одного знака станет равным указанному заданному количеству, при этом при положительной разности продолжают разворот приемной антенны, а при отрицательной разности производят ее остановку в положении, соответствующем первому шагу и фиксируют контрольное значение азимута, затем по результатам измерения и обработки сигнала при контрольном значении азимута определяют максимум сигнала, программу первого хода приемной антенны - рабочий ход или измерительный ход, скорость изменения сигнала, а также второе пороговое значение при первом измерительном ходе, после этого при допустимых значениях максимума сигнала и скорости изменения сигнала производят разворот приемной антенны в том же направлении и остановку на второй интервал времени - при уменьшении сигнала до первого порогового значения при первом рабочем ходе, или до второго порогового значения - при первом измерительном ходе, определяют и вводят в вычислительное устройство азимут, соответствующий пороговому значению сигнала, при этом азимуты, соответствующие первому пороговому значению, используют для нахождения азимута, соответствующего максимуму сигнала при первом ходе приемной антенны, затем производят разворот приемной антенны в обратную сторону, при этом при первом рабочем ходе осуществляют остановку приемной антенны при контрольном значении азимута на заданный четвертый интервал времени с измерением сигнала и определением скорости изменения сигнала, а при первом измерительном ходе приемной антенны последовательно осуществляют остановки с измерением сигнала и определением скорости изменения сигнала при контрольном значении азимута на заданный пятый интервал времени, а также при уменьшении сигнала до второго порогового значения на второй интервал времени с измерением сигнала и определением азимута, соответствующего второму пороговому значению сигнала, при этом азимуты, соответствующие второму пороговому значению, используют для нахождения азимута, соответствующего максимуму сигнала при втором ходе приемной антенны, затем при допустимых значениях максимума сигнала и скорости изменения сигнала приемную антенну разворачивают в обратную сторону, осуществляют остановку при контрольном значении азимута на заданный шестой интервал времени с измерением сигнала и определением скорости изменения сигнала, найденное для первого или второго хода приемной антенны значение азимута, соответствующее максимуму сигнала, при допустимых значениях максимума сигнала и скорости изменения сигнала используют при расчете программного азимута абонентской станции и наведении по азимуту приемной антенны на источник сигнала и передающей антенны на абонентскую станцию.
| СПОСОБ ПЕРЕДАЧИ РАДИОТЕЛЕВИЗИОННОГО СИГНАЛА | 2006 |
|
RU2308154C1 |
| СПОСОБ НАВЕДЕНИЯ ПЕРЕДАЮЩЕЙ АНТЕННЫ РЕТРАНСЛЯТОРА НА АБОНЕНТСКУЮ СТАНЦИЮ | 2005 |
|
RU2308157C1 |
| СПОСОБ НАВЕДЕНИЯ ПЕРЕДАЮЩЕЙ АНТЕННЫ РЕТРАНСЛЯТОРА | 2007 |
|
RU2328824C1 |
| US 5570097 A, 29.10.1996. | |||

