Изобретение относится к системам связи и может быть использовано для расширения зоны обслуживания в районах, где отсутствует или наблюдается неустойчивый прием радиотелевизионного сигнала.
Прямому прохождению сигнала от источника сигнала до точки приема препятствует рельеф местности: наличие холма или горной преграды, или точка приема расположена в ложбине. В таких случаях используют специальные линии СВЧ-связи и ретрансляторы. Источником радиотелевизионного сигнала может быть наземный источник или космический аппарат (КА).
Известны способы передачи радиотелевизионного сигнала, реализованные в станциях спутниковой связи. Указанные станции обычно представляют собой приемо-передающие радиостанции с одной общей антенной (на прием и на передачу). Для наведения антенны в этих станциях используют способы, в которых проводят режим программного наведения в заданную точку пространства, а также режим точного наведения по принимаемому сигналу (режим автосопровождения). Переход в режим автосопровождения осуществляют с помощью поиска и захвата сигнала (Покрас A.M., Сомов A.M., Цуриков Г.Г. Антенны земных станций спутниковой связи. - М.: Радио и связь, 1985, с.35-76).
В режиме точного наведения по принимаемому сигналу могут использоваться различные методы: метод экстремального наведения, моноимпульсный метод и др.
Недостатком данных способов является трудность реализации точного программного наведения антенны, что связано с необходимостью использования достаточно сложных точных измерительных средств.
Известен способ передачи радиотелевизионного сигнала, использованный в станции спутниковой связи, содержащей параболическую зеркальную антенну с СВЧ-блоком и блоками азимутальной и угломестной осей, блок наведения антенны, вычислительное устройство, снабженное программами, включая программы наведения антенны (Фролов О.П. Антенны для земных станций спутниковой связи. - М.: Радио и связь, 2000, с.260-265).
В данном способе проводят режим программного наведения антенны по углу места и азимуту в заданную точку пространства, а также режим точного наведения антенны на источник сигнала с использованием автосопровождения, реализованного посредством метода экстремального наведения. Режим точного наведения антенны осуществляют путем перехода из режима программного наведения с использованием поиска и захвата сигнала.
Недостатком данного способа является значительная погрешность программного наведения. Это обусловлено, прежде всего, ошибкой определения меридиана.
Прототипом изобретения является способ передачи радиотелевизионного сигнала, реализованный в ретрансляторе, содержащем приемную и передающую параболические зеркальные антенны, а также СВЧ-блоки, блоки азимутальной и угломестной осей приемной и передающей антенн. В состав ретранслятора также входят блок наведения приемной антенны и вычислительное устройство, снабженное программами, включая программы наведения антенн. Передачу радиотелевизионного сигнала осуществляют на абонентскую станцию, содержащую параболическую зеркальную антенну с СВЧ-блоком и блоками азимутальной и угломестной осей, блок наведения антенны, вычислительное устройство, снабженное программами, включая программы наведения антенны - патент РФ №2368076, Н04В 5/00, 2006 г.
В данном способе осуществляют наведение приемной антенны ретранслятора на источник сигнала с использованием программного наведения и точного наведения по принимаемому сигналу, а также программное наведение передающей антенны ретранслятора на абонентскую станцию в соответствии с рассчитанными углом места и азимутом и проводимое после наведения передающей антенны наведение антенны абонентской станции на ретранслятор, осуществляемое последовательно путем предварительного программного наведения и точного наведения по принимаемому от ретранслятора сигналу.
Для определения меридиана в этом способе используют направление оптической оси приемной антенны ретранслятора на источник сигнала в режиме точного наведения указанной антенны. Взаимную привязку осей приемной и передающей антенн ретранслятора осуществляют при размещении этих антенн на общем основании.
В указанном способе в процессе эксплуатации ретранслятора производят компенсацию угловых ошибок наведения передающей антенны ретранслятора на абонентскую станцию, обусловленных уходом основания мобильного ретранслятора, размещаемого, например, в кузове автомобиля или на временной площадке. Уходы основания вызваны сезонными или суточными перемещениями грунта. Для реализации данной компенсации проводят измерение азимута и угла места источника сигнала с использованием приемной антенны ретранслятора, а также определение отклонения основания от местной вертикали с помощью дополнительного датчика угла.
Недостатком данного способа является относительно невысокая точность наведения передающей антенны ретранслятора на абонентскую станцию, обусловленная погрешностью местонахождения КА на орбите и навигационными ошибками, вызванными погрешностями определения положения ретранслятора, абонентской станции и источника сигнала.
Также недостатками этого способа являются сравнительно большие габариты и масса ретранслятора, связанные с использованием общего основания для приемной и передающей антенн, и значительные трудозатраты при начальной выставке ретранслятора.
Технической задачей, решаемой изобретением, является повышение точности наведения передающей антенны ретранслятора на абонентскую станцию, уменьшение массы и габаритов ретранслятора, а также упрощение эксплуатации ретранслятора.
Для решения указанной технической задачи способ передачи радиотелевизионного сигнала включает наведение приемной антенны ретранслятора на источник сигнала с использованием программного наведения и точного наведения по принимаемому сигналу, программное наведение передающей антенны ретранслятора на абонентскую станцию в соответствии с рассчитанными углом места и азимутом, а также проводимое после наведения передающей антенны ретранслятора наведение антенны абонентской станции на ретранслятор, осуществляемое последовательно путем предварительного программного наведения и точного наведения по принимаемому от ретранслятора сигналу, после проведения программного наведения передающей антенны ретранслятора на абонентскую станцию с помощью команды, подаваемой на абонентскую станцию от ретранслятора через дополнительный радиоканал, включающий блок радиоканала ретранслятора и блок радиоканала абонентской станции, производят включение режима наведения антенны абонентской станции на ретранслятор, а после проведения этого режима с помощью команды, подаваемой на ретранслятор от абонентской станции через дополнительный радиоканал, включают режим сканирования передающей антенны ретранслятора по углу места, при этом сначала проводят измерение сигнала, принимаемого абонентской станцией, в начальном положении передающей антенны ретранслятора, затем производят поворот передающей антенны в одну сторону на один шаг с измерением текущей величины сигнала в абонентской станции и определением разности текущего и начального значений сигналов, если найденная разность положительная, то с помощью команды, подаваемой на ретранслятор от абонентской станции через дополнительный радиоканал, продолжают разворот передающей антенны последовательно на один шаг в ту же сторону для поиска максимума сигнала, принимаемого абонентской станцией, при этом для каждого положения передающей антенны ретранслятора в абонентской станции осуществляют измерение величины сигнала и определение разности текущего и предшествующего значений сигнала, разворот передающей антенны прекращают при отрицательной разности текущего и предшествующего значений сигнала в абонентской станции, при этом по команде, передаваемой через дополнительный радиоканал от абонентской станции в ретранслятор, передающую антенну ретранслятора переводят в предшествующее положение, которое соответствует требуемому направлению на абонентскую станцию и максимуму сигнала, принимаемого абонентской станцией, после чего в ретрансляторе формируют команду по проведению режима сканирования передающей антенны ретранслятора по азимуту, которую передают на абонентскую станцию через дополнительный радиоканал, если разность текущего значения сигнала, принимаемого абонентской станцией, соответствующего повороту передающей антенны ретранслятора по углу места на первый шаг, и начального значения сигнала отрицательная, то проводят поворот передающей антенны по углу места в обратную сторону до нахождения положения, соответствующего максимуму принимаемого сигнала, если при данном повороте текущее значение сигнала уменьшается по сравнению с предыдущим значением при повороте передающей антенны на два шага, то передающую антенну переводят в начальное положение, которое соответствует максимуму сигнала, принимаемому абонентской станцией, затем аналогично режиму сканирования передающей станции по углу места осуществляют режим сканирования передающей антенны ретранслятора по азимуту, после установки передающей антенны в требуемое положение по углу места и азимуту, характеризуемое максимумом сигнала, принимаемого абонентской станцией, с помощью дополнительного радиоканала осуществляют одновременное включение проводимых автономно режима контроля сигнала, принимаемого приемной антенной ретранслятора, и режима контроля сигнала, принимаемого абонентской станцией, измерение и осреднение указанных сигналов проводят в заданные интервалы времени, величины сигналов, измеренные в первые интервалы времени, используют как начальные значения, если уменьшение текущего значения сигнала, принимаемого приемной антенной ретранслятора, по сравнению с начальным значением превышает допустимую величину, то для нахождения максимума принимаемого сигнала последовательно по углу места и азимуту используют точное наведение по сигналу, коррекцию положения приемной антенны ретранслятора по углу места и азимуту проводят, если найденное положение, соответствующее максимуму принимаемого сигнала, отличается по соответствующему углу от начального положения, затем в вычислительном устройстве ретранслятора прежнее начальное значение сигнала заменяют на измеренное после проведения операций контроля и коррекции положения приемной антенны, при превышении в абонентской станции разности начального и текущего значений сигнала допустимой величины с помощью дополнительного радиоканала в абонентской станции формируют команды, по которым последовательно проводят режимы сканирования передающей антенны ретранслятора по углу места и азимуту, с помощью этих режимов находят максимум сигнала по углу места и азимуту, принимаемого абонентской станцией, коррекцию положения передающей антенны ретранслятора по углу места и азимуту проводят, если найденное положение, соответствующее максимуму сигнала, принимаемого абонентской станцией, отличается по соответствующему углу от начального положения, затем в вычислительном устройстве абонентской станции прежнее начальное значение сигнала, принимаемого абонентской станцией, заменяют на измеренное после проведения операций контроля и коррекции положения передающей антенны ретранслятора.
Способ реализуется благодаря проведению дополнительных режимов при работе ретранслятора и абонентской станции.
В качестве примера рассматриваем ретранслятор, в котором приемная и передающая антенны представляют собой остронаправленную параболическую зеркальную антенну с шириной диаграммы направленности - φДН, равной 60 угловых минут.
Для частот от 3 до 6 ГГц (С-диапазон) диаметр такой антенны составляет от 7 до 3,5 метров.
Высокой считается точность наведения антенны с потерями по мощности 0,5 дБ, что соответствует погрешности наведения ±0,2 φДН. Для рассматриваемого примера это соответствует ошибке наведения ±12 угловых минут.
Способ иллюстрируется фиг.1-5, на которых приведены: на фиг.1 - функциональная схема ретранслятора, на фиг.2 - функциональная схема абонентской станции, на фиг.3 - блок-схема режимов наведения приемной и передающей антенн ретранслятора и антенны абонентской станции, на фиг.4 - блок-схема подпрограммы режима сканирования передающей антенны ретранслятора по углу места, на фиг.5 - варианты сканирования передающей антенны ретранслятора по углу места.
Ретранслятор, изображенный на фиг.1, содержит приемную антенну 1, на которой установлен СВЧ-блок 2 приемной антенны, соединенный с размещенным на передающей антенне 3 СВЧ-блоком 4 передающей антенны. СВЧ-блок 2 и СВЧ-блок 4 предназначены для усиления, фильтрации и преобразования частоты ретранслируемого СВЧ-сигнала. Второй выход СВЧ-блока 2 приемной антенны соединен с блоком 5 наведения приемной антенны, предназначенным для преобразования СВЧ-сигнала в сигнал, используемый для точного наведения приемной антенны 1. Для управления по азимутальной оси 6 приемной антенны ретранслятор содержит блок 7 азимутальной оси приемной антенны, а для управления по угломестной оси 8 приемной антенны - блок 9 угломестной оси приемной антенны.
Для управления по азимутальной оси 10 передающей антенны ретранслятор содержит блок 11 азимутальной оси передающей антенны, а для управления по угломестной оси 12 передающей антенны - блок 13 угломестной оси передающей антенны.
В состав блоков 7 и 9 приемной антенны и блоков 11 и 13 передающей антенны входят датчики углов с устройствами обработки сигналов, а также приводы, обеспечивающие повороты вокруг осей.
Ретранслятор содержит также вычислительное устройство 14, предназначенное для управления приемной антенной 1 и передающей антенной 3 и соединенное с блоком 5, а также с блоками 7, 9, 11 и 13. В состав ретранслятора входит также устройство 15 индикации.
Приемная антенна 1 ретранслятора предназначена для усиления принимаемого радиотелевизионного сигнала 16, приходящего от источника сигнала, а передающая антенна 3 - для усиления излучаемого радиотелевизионного сигнала 17, поступающего от ретранслятора на абонентскую станцию.
В состав ретранслятора введен блок 18 дополнительного радиоканала ретранслятора, подсоединенный к вычислительному устройству 14 и используемый для служебной радиосвязи ретранслятора и абонентской станции. В состав блока 18 входят ненаправленная или слабонаправленная приемо-передающая антенна, приемное устройство, передающее устройство и устройство преобразования.
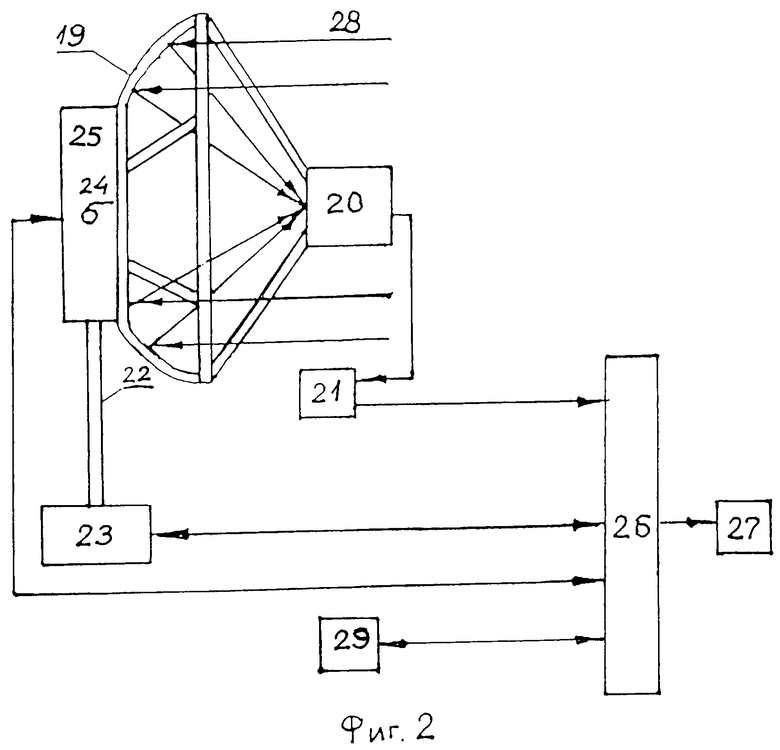
Абонентская станция, изображенная на фиг.2, содержит остронаправленную параболическую зеркальную приемную антенну 19, на которой установлен СВЧ-блок 20, соединенный с блоком 21 наведения антенны, предназначенным для преобразования СВЧ-сигнала в сигнал, используемый для точного наведения антенны 19. Для управления по азимутальной оси 22 антенны абонентская станция содержит блок 23 азимутальной оси антенны, а для управления по угломестной оси 24 антенны - блок 25 угломестной оси антенны.
В состав блоков 23 и 25 входят датчики углов с устройствами обработки сигналов, а также приводы, обеспечивающие поворот вокруг осей.
Абонентская станция содержит также вычислительное устройство 26, соединенное с блоками 21, 23 и 25, а также подсоединенное к вычислительному устройству 26 устройство 27 индикации.
Антенна 19 абонентской станции предназначена для усиления радиотелевизионного сигнала 28, приходящего от ретранслятора.
В состав абонентской станции введен блок 29 дополнительного радиоканала абонентской станции, соединенный с вычислительным устройством 26 и используемый для служебной радиосвязи ретранслятора и абонентской станции. В состав блока 29 входят ненаправленная или слабонаправленная приемо-передающая антенна, приемное устройство, передающее устройство и устройство преобразования.
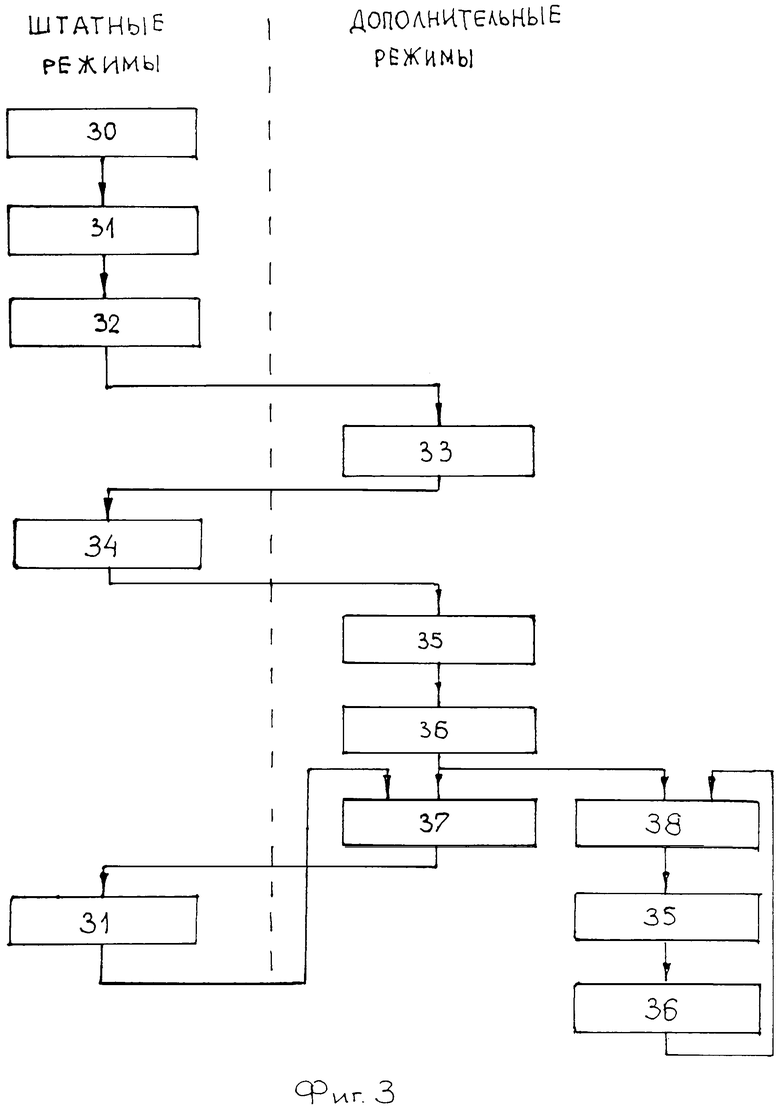
На фиг.3 изображены режимы:
30 - наведение приемной антенны ретранслятора на источник сигнала - поиск и захват сигнала;
31 - точное наведение приемной антенны ретранслятора на источник сигнала;
32 - программное наведение передающей антенны ретранслятора на абонентскую станцию;
33 - управление абонентской станцией с помощью дополнительного радиоканала;
34 - наведение антенны абонентской станции на ретранслятор;
35 - сканирование передающей антенны ретранслятора по углу места;
36 - сканирование передающей антенны ретранслятора по азимуту;
37 - контроль сигнала, принимаемого ретранслятором;
38 - контроль сигнала, принимаемого абонентской станцией.
На фиг.3 показаны известные штатные режимы наведения антенн ретранслятора и абонентской станции, а также новые дополнительные режимы, использование которых позволило решить указанную техническую задачу.
Блок-схема отражает последовательность режимов и их взаимосвязь.
С помощью режимов 30, 31, 32, 33, 34, 35, 36 (фиг.3) реализуют начальное наведение (при вводе ретранслятора в эксплуатацию) приемной и передающей антенн 1 и 3 (фиг.1) соответственно на источник сигнала и абонентскую станцию, а также антенны 19 (фиг.2) абонентской станции на ретранслятор.
После этого при эксплуатации ретранслятора осуществляют режимы передачи радиотелевизионного сигнала от источника сигнала на абонентскую станцию. При этом контролируют сигнал, принимаемый ретранслятором (режим 37, фиг.3), и сигнал, принимаемый абонентской станцией (режим 38). При выходе изменений указанных контролируемых сигналов за допустимые пределы осуществляют режим 31 для приемной антенны 1 (фиг.1) или режимы 35 и 36 (фиг.3) для передающей антенны 3 (фиг.1) соответственно с целью компенсации ошибок наведения указанных антенн.
При установке и вводе ретранслятора в эксплуатацию производится его начальная выставка. При помощи шайб и прокладок, а также измерительных средств (уровень, теодолит) осуществляется выставка азимутальных осей антенн перпендикулярно горизонтальной плоскости - горизонтирование.
Взаимная привязка азимутальных систем (нулевых азимутальных отсчетов) приемной и передающей антенн 1 и 3 производится при изготовлении ретранслятора с помощью посадочных штифтов, если в составе ретранслятора используется общее основание для обеих антенн. При раздельных основаниях антенн их начальная азимутальная привязка осуществляется при установке антенн ретранслятора на посадочную поверхность с помощью фиксирующих отверстий. Точность азимутальной привязки при фиксации положения антенн обеспечивается с использованием теодолита и технологических зеркал. Привязка азимутальной измерительной системы ретранслятора к меридиану проводится с помощью дополнительных технических средств (радиокомпас, гирокомпас и т.д.).
В изобретении в качестве физически реализуемого азимутального базового направления используют направление оптической оси приемной антенны 1 ретранслятора в режиме точного наведения на источник сигнала. При этом направление меридиана, которое используется в программе наведения передающей антенны 3 ретранслятора, находят расчетным путем. В том случае, когда источником сигнала является КА, точность нахождения меридиана определяется ошибкой положения КА и приборной ошибкой (ошибкой отработки угла) приемной антенны 1.
Ошибка начального программного наведения передающей антенны 3 (режим 32, фиг.3) на абонентскую станцию по азимуту является суммой ошибки положения КА на орбите, ошибки начальной привязки азимутальных систем антенн 1 и 3 (фиг.1), навигационной ошибки (ошибки положения ретранслятора и абонентской станции), а также приборных ошибок приемной и передающей антенн 1 и 3.
Ошибка положения современных КА («Галс», «Экспресс») составляет ±12 угловых минут.
Для рассматриваемого примера ретранслятора суммарная ошибка начального программного наведения передающей антенны 3 по азимуту превышает допустимое значение.
При использовании наземного источника сигнала ошибка нахождения меридиана определяется ошибками положения ретранслятора и источника сигнала (навигационной ошибкой), а также приборной ошибкой приемной антенны 1.
По углу места ошибка начального программного наведения передающей антенны 3 на абонентскую станцию (режим 32, фиг.3) включает ошибку горизонтирования, навигационную ошибку (ошибку положения ретранслятора и абонентской станции) и приборную ошибку передающей антенны 3 (фиг.1).
С помощью дополнительных режимов сканирования передающей антенны 3 по углу места и азимуту (35 и 36, фиг.3) осуществляют компенсацию ошибок начального программного наведения передающей антенны 3 (фиг.1): по углу места - горизонтирования и навигационной, по азимуту - местонахождения КА и навигационной. Это обеспечивается благодаря реализации обратной связи по радиосигналам, формируемым с помощью дополнительного радиоканала, блоки которого установлены на ретрансляторе и абонентской станции.
При эксплуатации мобильных ретрансляторов, размещаемых, например, в кузове автомобиля или на временной площадке, в режимах передачи радиотелевизионного сигнала с помощью указанных режимов 35 и 36 (фиг.3) компенсируют угловые ошибки наведения передающей антенны 3 (фиг.1) на абонентскую станцию, обусловленные уходом основания ретранслятора. Эти уходы вызваны сезонными и суточными перемещениями грунта. Данные ошибки могут достигать 30-120 угловых минут.
Благодаря использованию указанных дополнительных режимов для передающей антенны 3, а также точного наведения по сигналу для приемной антенны 1 в предлагаемом способе снижают требования к точности горизонтирования и начальной привязки азимутальных систем данных антенн при начальной выставке ретранслятора.
Это позволяет использовать приемную и передающую антенны 1 и 3 с раздельными основаниями, при этом значительно (на 30-70 кг) сократить массу ретранслятора, а также уменьшить трудоемкость проводимых работ и упростить эксплуатацию ретранслятора.
В предлагаемом способе ошибки начального программного наведения передающей антенны 3 на абонентскую станцию по углу места и азимуту должны находиться в допустимых пределах. При этом величина принимаемого абонентской станцией сигнала должна превышать заданное минимальное значение.
В рассматриваемом примере ретранслятора максимальное значение этих ошибок не превышает (0,4-0,5) φДН или (24-30) угловых минут. Это соответствует уменьшению мощности сигнала на (1,5-3) дБ и напряжения на (15-30) процентов от максимальной величины сигнала.
Предложенный способ передачи радиотелевизионного сигнала реализуется следующим образом.
После подачи на ретранслятор питания осуществляют последовательно два известных штатных режима: 30 (фиг.3) - наведение приемной антенны ретранслятора на источник сигнала - поиск и захват сигнала; 31 - точное наведение приемной антенны ретранслятора на источник сигнала.
Наведение приемной антенны 1 (фиг.1) ретранслятора на источник сигнала проводят с использованием программного наведения (режим 30, фиг.3) и точного наведения по принимаемому сигналу (режим 31).
При реализации режима 30 сначала проводят программный разворот по углу места приемной антенны 1 (фиг.1) ретранслятора на рассчитанный от горизонтальной плоскости угол. Погрешность этого программного разворота по углу места включает ошибку горизонтирования, приборную ошибку приемной антенны 1 и ошибку положения КА или навигационную ошибку (ошибку положения ретранслятора и источника сигнала) при наземном источнике сигнала. Указанную погрешность программного наведения выбирают такой, чтобы обеспечить однострочный разворот приемной антенны 1 по азимуту при поиске сигнала. В рассматриваемом примере эта погрешность не превышает (0,4-0,5) φДН или (24-30) угловых минут.
Включение режима 30 (фиг.3) отображают на устройстве 15 (фиг.1) индикации.
Программный разворот приемной антенны 1 по азимуту осуществляют на угол, найденный с помощью простого относительно грубого магнитного компаса или радиокомпаса, имеющих погрешность от 0,5 до 3 градусов. Поскольку компас используется только при начальном наведении, он может не входить в состав аппаратуры ретранслятора.
Программный разворот приемной антенны 1 проводят в ту сторону, где меньше азимутальный угол между расчетным положением источника сигнала и исходным положением приемной антенны 1.
Для защиты от ложных сигналов приемный канал ретранслятора включают для измерения сигнала при азимуте, соответствующем границе зоны азимутального поиска сигнала. Границы зоны поиска отстоят от расчетного программного угла в обе стороны на угол, равный сумме расчетной погрешности программного угла и ширины диаграммы направленности приемной антенны 1.
Захват принимаемого сигнала фиксируют при превышении величины принимаемого сигнала заданного порогового значения.
Принимаемый приемной антенной 1 сигнал измеряют и преобразуют с помощью блока 5 и вычислительного устройства 14.
В предлагаемом способе используют дискретный (пошаговый) разворот приемной и передающей антенн 1 и 3 ретранслятора и антенны 19 (фиг.2) абонентской станции. Он может быть реализован с помощью шагового мотора или двигателя постоянного тока. При использовании двигателя по программе отрабатываются одинаковые углы (шаги). Здесь может быть обеспечена высокая точность с помощью прецизионных датчиков угла.
Величину шага определяют, исходя из требуемой точности наведения указанных антенн.
В рассматриваемом примере для приемной и передающей антенн 1 и 3 (фиг.1) ретранслятора и антенны 19 (фиг.2) абонентской станции выбирают величину шага - 3 угловые минуты.
При дискретном развороте антенны время измерения сигнала в каждом положении выбирают таким, чтобы разность двух соседних измерений была больше суммарной ошибки определения этой разности. Указанная суммарная ошибка включает составляющие, обусловленные шумом, преобразованием сигнала, неточностью выставки антенны. Кроме того, для разнесенных во времени измерений возникает ошибка, вызванная изменением сигнала из-за потерь в атмосфере. Преобладающей является ошибка из-за шума, которая снижается при увеличении времени осреднения сигнала.
Для уменьшения ошибки из-за шума время измерения выбирают существенно больше, чем период опроса измеряемого сигнала вычислительным устройством 14 (фиг.1) и 26 (фиг.2). Период опроса в рассматриваемом примере составляет 10-3 секунды. Время измерения сигнала является временем осреднения в вычислительном устройстве 14 (фиг.1) и 26 (фиг.2) значений сигнала, поступающих с частотой опроса. При этом осредненное значение сигнала по времени привязывают к середине интервала времени измерения.
В рассматриваемом примере время измерения сигнала приемной антенной 1 (фиг.1) до захвата сигнала выбирают равным 0,1 секунды.
Величина принимаемого сигнала при его поиске по азимуту зависит от ошибки начального программного наведения приемной антенны 1 по углу места. К уменьшению величины принимаемого сигнала могут также привести потери в атмосфере из-за осадков. При работе в С-диапазоне в условиях сильного ливня потери сигнала могут достигать по мощности (0,5-1,5) дБ по напряжению (5-15) процентов.
Пороговое значение сигнала выбирают таким, чтобы обеспечить захват при допустимой минимальной величине сигнала. Для рассматриваемого примера пороговое значение составляет (40-60) % по напряжению от максимального значения.
После захвата сигнала проводят режим 31 (фиг.3) - точное наведение приемной антенны ретранслятора на источник сигнала. По найденному при точном наведении азимуту источника сигнала в вычислительном устройстве 14 ретранслятора определяют направление меридиана и рассчитывают азимут абонентской станции, который используют для программного наведения передающей антенны 3 на абонентскую станцию по азимуту. При точном наведении приемной антенны 1 ретранслятора на источник сигнала и антенны 19 (фиг.2) абонентской станции на ретранслятор используют экстремальный метод наведения, который не требует дополнительных аппаратурных затрат. Для реализации точного наведения приемной антенны 1 (фиг.1) на источник сигнала используют блок 5 и вычислительное устройство 14.
При реализации режима 31 (фиг.3) после захвата сигнала для нахождения его максимума продолжают движение приемной антенны 1 (фиг.1) по азимуту с определением текущего значения сигнала Uci и разности двух соседних сигналов:

При первой фиксации отрицательной разности сигналов ΔUci приемную антенну 1 возвращают в предшествующее положение, характеризуемое сигналом Uci и углом Азi. При этом угол Азi соответствует азимуту точного наведения Азтн.
Если в режиме 30 (фиг.3) расчетный программный азимут источника сигнала и исходное положение приемной антенны 1 (фиг.1) отличаются на угол, который не превышает половины зоны азимутального поиска сигнала, то приемный канал ретранслятора включают перед началом разворота. Возможен вариант, когда начальная величина измеряемого сигнала не превышает заданное пороговое значение. При этом осуществляют поиск сигнала в пределах зоны азимутального поиска. Разворот в одну сторону, например по часовой стрелке в пределах зоны поиска, проводят до возможной фиксации порогового значения сигнала. Если при этом развороте пороговое значение сигнала не фиксируют, то проводят разворот приемной антенны 1 в пределах зоны поиска в обратную сторону до фиксации порогового значения сигнала. После захвата сигнала осуществляют режим 31 (фиг.3).
В другом случае начальное значение измеряемого сигнала превышает заданное пороговое значение, тогда проводят режим 31 (фиг.3) с начальным определением направления азимутального поиска максимума сигнала. При этом производят разворот приемной антенны 1 (фиг.1) по азимуту на один шаг, например, по часовой стрелке. Если величина измеряемого сигнала увеличивается, то разворот продолжают до нахождения максимума сигнала. Если при указанном повороте на один шаг величина сигнала уменьшается, то проводят поворот приемной антенны 1 в обратную сторону до нахождения максимума сигнала.
Возможен случай, когда при повороте приемной антенны 1 в обратную сторону на два шага фиксируют отрицательную разность соседних сигналов. При этом приемную антенну возвращают в начальное положение, которое соответствует точному наведению приемной антенны на источник сигнала.
Затем осуществляют точное наведение приемной антенны 1 по углу места. Сначала определяют направление поиска максимума сигнала. При этом производят разворот приемной антенны 1 по углу места на один шаг, например, по часовой стрелке. Если величина измеряемого сигнала увеличивается, то разворот продолжают до первой фиксации отрицательной разности соседних сигналов.
Если при упомянутом повороте приемной антенны 1 на один шаг величина сигнала уменьшается, то проводят ее разворот в обратную сторону до первой фиксации отрицательной разности соседних сигналов.
После этого приемную антенну 1 возвращают в предшествующее положение, соответствующее требуемому углу места УМтн.
Найденные углы Азтн и УМтн соответствуют точному наведению приемной антенны 1 на источник сигнала.
Разворот приемной антенны 1 вокруг азимутальной оси 6 и угломестной оси 8 производят соответственно с помощью блоков 7 и 9, управляемых от вычислительного устройства 14.
При увеличении принимаемого сигнала в режиме 31 (фиг.3) крутизна диаграммы направленности приемной антенны 1 (фиг.1) падает, что приводит к уменьшению разности двух соседних измерений. Основную составляющую суммарной ошибки, определяемую шумом, можно снизить увеличением времени измерений. Однако при этом увеличивается ошибка ΔUПА, обусловленная изменением сигнала в атмосфере из-за осадков.
Для двух осредненных сигналов, снимаемых в разнесенные по времени одинаковые измерительные интервалы времени Δtu1, при изменении принимаемого сигнала во времени из-за потерь в атмосфере ошибку ΔUПА определяют с помощью формулы:

где V - скорость изменения принимаемого радиотелевизионного сигнала,
ΔtпA - время между серединами измерительных интервалов времени Δtu1.
Для двух последовательных во времени измерений:

где Δtд - время движения антенны из одного положения в другое.
При работе в С-диапазоне в условиях сильного ливня скорость изменения принимаемого радиотелевизионного сигнала не превышает (0,1-0,3) % в секунду.
В рассматриваемом примере ретранслятора выбраны интервалы времени Δtu1=1 с и Δtд=0,1 с.
При разработке ретранслятора может оказаться целесообразным вариант, когда на пологом участке диаграммы направленности приемной антенны 1, который составляет ±(0,2-0,4) φДН относительно азимута и угла места, соответствующих максимуму сигнала, расчетная суммарная ошибка измерений превышает допустимую величину. В этом случае ошибку уменьшают введением повторных измерений и определением осредненной разности соседних измерений. Величина суммарной ошибки осредненной разности соседних измерений снижается в √n раз, где n - количество измерений.
Повторные измерения вводят в программу вычислительного устройства 14 при изготовлении ретранслятора. Их проводят в режиме 31 (фиг.3) при величине сигнала, превышающей пороговое значение.
Затем осуществляют штатный режим 32 - программное наведение передающей антенны на абонентскую станцию. При реализации этого режима сначала проводят программный разворот передающей антенны 3 (фиг.1) на рассчитанный угол от горизонтальной плоскости по углу места. После этого производят программный разворот передающей антенны 3 по азимуту на рассчитанный угол с использованием найденного направления меридиана.
Разворот передающей антенны 3 вокруг азимутальной оси 10 и угломестной оси 12 производят соответственно с помощью блоков 11 и 13, управляемых от вычислительного устройства 14.
В рассматриваемом примере в режиме 32 (фиг.3) при программном развороте передающей антенны 3 (фиг.1) величина шага составляет 3 угловые минуты, время шага - 0,1 секунды.
После проведения режима 32 (фиг.3) осуществляют дополнительный режим 33 - управление абонентской станцией с помощью дополнительного радиоканала.
Через заданный интервал времени после окончания режима 32 по команде вычислительного устройства 14 (фиг.1) в блоке 18 дополнительного радиоканала ретранслятора производят формирование команды на включение режима 33 (фиг.3).
Включение режима 33 с помощью данной команды отображают на устройстве 15 индикации (фиг.1). Команда представляет собой, например, несколько интервалов заданной длительности, заполненных радиосигналом несущей частоты, генерируемым в передающем устройстве блока 18. Радиосигнал через приемо-передающие антенны блока 18 и блока 29 (фиг.2) поступает на приемное устройство блока 29.
В приемном устройстве и устройстве преобразования блока 29 осуществляют усиление и преобразование сигнала, поступающего в вычислительного устройство 26. В вычислительном устройстве 26 проводят контроль сигнала, например, по длительности и по количеству интервалов, заполненных радиосигналом несущей частоты. Затем в вычислительном устройстве 26 формируют команду на включение режима 34 (фиг.3) - наведение антенны абонентской станции на ретранслятор. Проведение режима 33 (фиг.3) фиксируют на устройстве 27 (фиг.2) индикации.
Штатный режим 34 (фиг.3) - наведение антенны абонентской станции на ретранслятор - производят аналогично режимам 30 и 31 (фиг.3). При этом источником сигнала для абонентской станции является передающая антенна 3 ретранслятора.
Разворот антенны 19 (фиг.2) вокруг азимутальной оси 22 и угломестной оси 24 проводят соответственно с помощью блоков 23 и 25, управляемых от вычислительного устройства 26. Точное наведение антенны 19 на ретранслятор осуществляют с помощью блока 21 и вычислительного устройства 26. После установки антенны 19 в положение, соответствующее точному наведению ее на ретранслятор, через заданный интервал времени по команде вычислительного устройства 26 в блоке 29 радиоканала абонентской станции формируют команду, характеризующую окончание режима 34 (фиг.3). В соответствии с данной командой осуществляют дополнительный режим 35 - сканирование передающей антенны ретранслятора по углу места.
Формирование указанной команды в блоке 29, передачу радиосигнала от блока 29 на блок 18 (фиг.1), преобразование сигнала в блоке 18 и формирование команды в вычислительном устройстве 14 производят аналогично операциям, проводимым с помощью дополнительного радиоканала для включения режима 33 (фиг.3).
Если при реализации предлагаемого способа на пологом участке диаграммы направленности антенны 19 (фиг.2) расчетная суммарная погрешность измерений превышает допустимую величину, то аналогично режиму 31 (фиг.3) для повышения точности используют повторные измерения и определение осредненной разности соседних измерений.
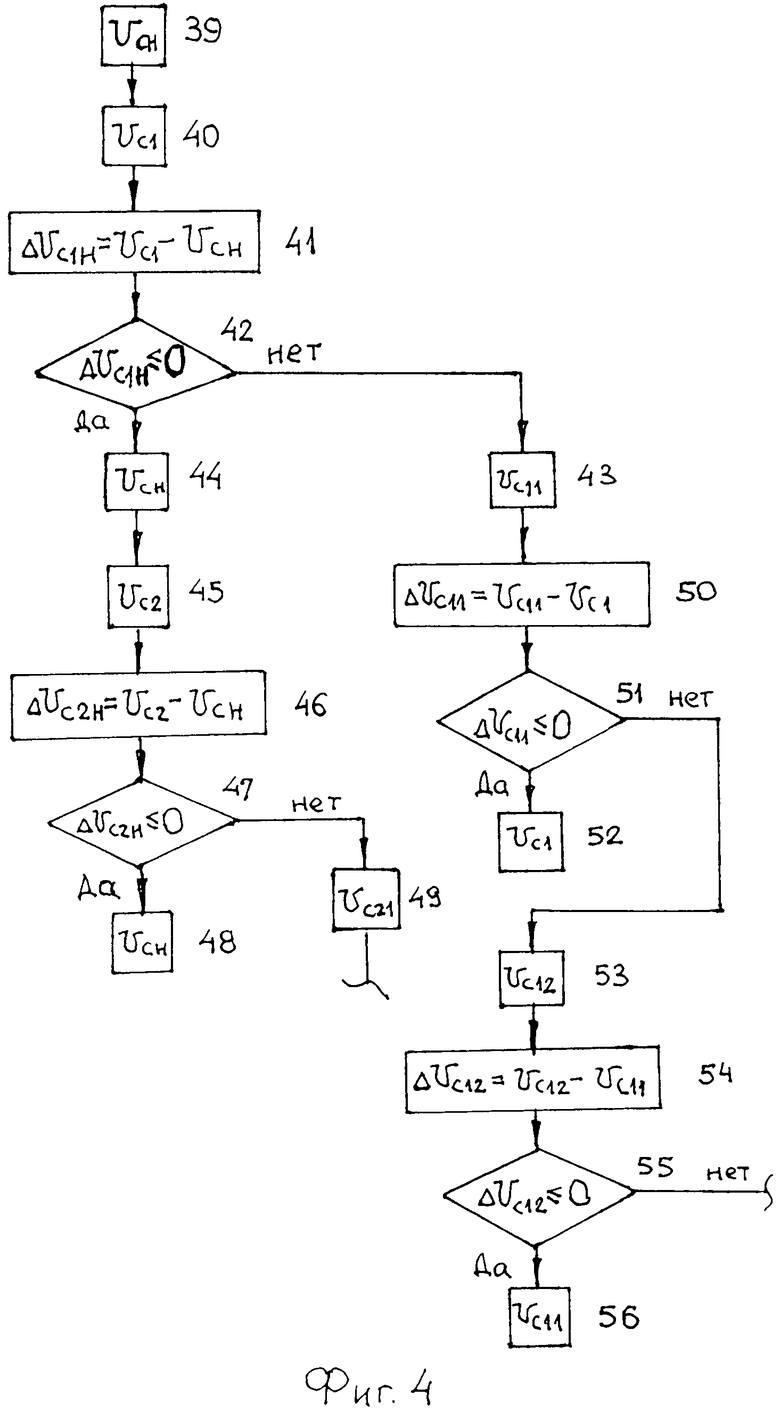
На фиг.4 приведена блок-схема подпрограммы режима сканирования передающей антенны 3 (фиг.1) ретранслятора по углу места.
Запуск подпрограммы производят с помощью той же команды, по которой включают режим 35 (фиг.3).
С помощью этой же команды синхронизируют операции управления в вычислительных устройствах 14 (фиг.1) ретранслятора и 26 (фиг.2) абонентской станции.
При сканировании передающей антенны 3 (фиг.1) ретранслятора для каждого дискретного положения этой антенны в абонентской станции с помощью блока 21 (фиг.2) и вычислительного устройства 26 проводят измерение и обработку принимаемого от передающей антенны 3 (фиг.1) сигнала.
Величину шага и время измерения сигнала для одного шага выбирают, исходя из требуемой точности наведения передающей антенны 3.
В рассматриваемом примере величина шага передающей антенны 3 ретранслятора составляет 3 угловые минуты, величина сигнала, принимаемого антенной 19 (фиг.2) абонентской станции, превышает заданное минимальное значение (40-60)% от максимального значения, а время измерения Δtu2 равно 1 секунде.
На фиг.4 в качестве первой операции данной подпрограммы показано измерение начального значения сигнала Ucн в абонентской станции в течение Δtu2 (операция 39, фиг.4).
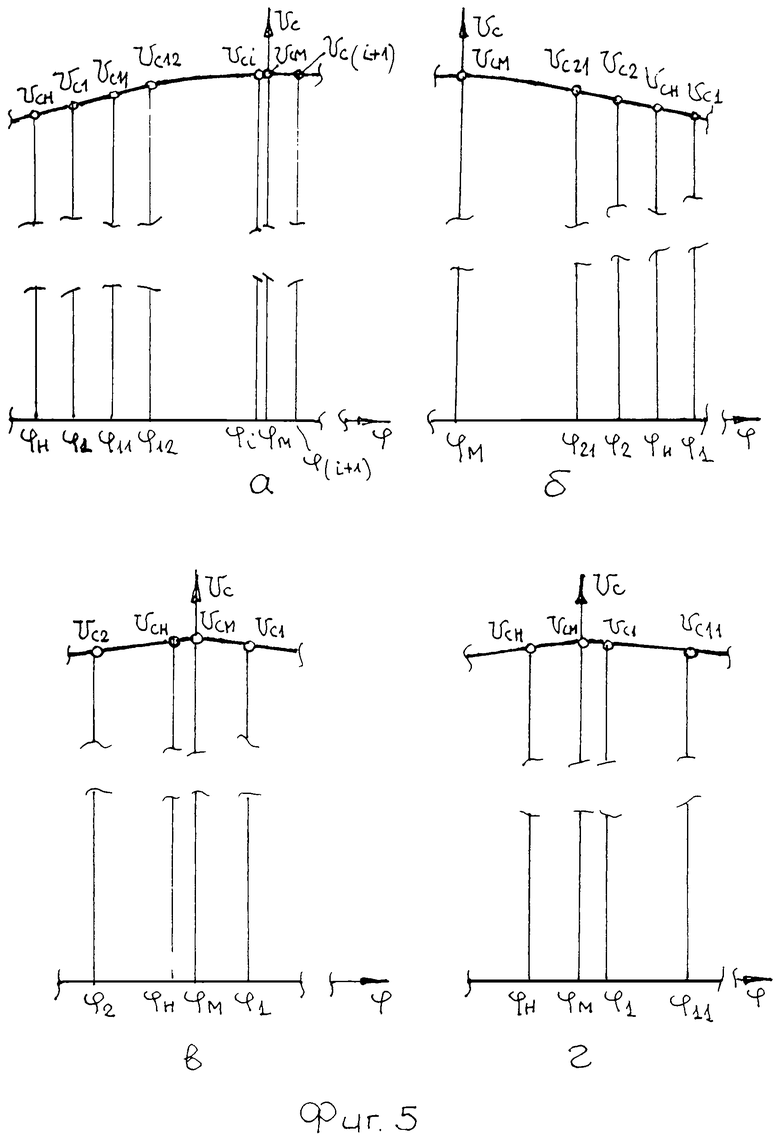
На фиг.5 показаны варианты сканирования передающей антенны 3 (фиг.1) ретранслятора по углу места. На приведенных вариантах (фиг.5а, б, в, г) начальному значению сигнала Uсн, измеряемого абонентской станцией, соответствует угол места передающей антенны 3 (фиг.1) φн, максимальному значению сигнала Uсм соответствует угол φм.
Затем по программе вычислительного устройства 14 проводят операцию 40 (фиг.4), при которой передающую антенну 3 (фиг.1) разворачивают на один шаг, например, по часовой стрелке относительного начального положения. Для указанного положения φ1 (фиг.5а, б, в, г) передающей антенны 3 (фиг.1) в абонентской станции определяют значение сигнала Uс1. Затем после окончания интервала Δtu2 в вычислительном устройстве 26 (фиг.2) последовательно осуществляют операции 41 и 42 (фиг.4). Эти вычислительные операции проводят в положении φ1 передающей антенны 3 (фиг.1). Суммарное время этих вычислительных операций Δtu3 существенно (на несколько порядков) меньше интервала времени Δtu2.
В результате проведения операции 41 (фиг.4) находят разность сигналов:

После этого проводят оценку найденной разности (операция 42).
Если условие 
не выполняется (результат «нет» операции 42), то производят операцию 43 - разворот передающей антенны 3 (фиг.1) в том же направлении в положение φ11 (фиг.5а) и измерение в течение интервала Δtu2 сигнала UC11, принимаемого абонентской станцией в этом положении передающей антенны 3 (фиг.1).
Разворот передающей антенны 3 при выполнении операции 43, а также при последующих операциях проводят по сигналу, формируемому в вычислительном устройстве 26 (фиг.2) и блоке 29 радиоканала абонентской станции и передаваемому на ретранслятор через дополнительный радиоканал.
Если условие (5) выполняется - результат «да» операции 42 (фиг.4), то передающую антенну 3 (фиг.1) сначала возвращают в положение φн (операция 44, фиг.4), а затем поворачивают на один шаг против часовой стрелки (операция 45) в положение φ2 (фиг.5б). В каждом из этих положений передающей антенны 3 (фиг.1) в течение интервала Δtu2 в абонентской станции измеряют значения сигнала соответственно UCH и UC2.
Затем в вычислительном устройстве 26 (фиг.2) при положении передающей антенны 3 (фиг.1) φ2 последовательно в течение интервала Δtu3 производят операции 46 и 47 (фиг.4).
В результате проведения операции 46 находят разность сигналов:

Повторное определение сигнала UCH проводят для того, чтобы обеспечить одинаковые интервалы времени между измерениями соответственно UCH и UC1, а также UCH и UC2.
Тем самым реализуются одинаковые условия при нахождении ΔUC1H и ΔUC2H.
При проведении операции 47 получают оценку разности ΔUC2H. Если условие:
выполняется (результат «да»), то это означает, что начальное положение φн передающей антенны 3 (фиг.1) соответствует направлению на абонентскую станцию с требуемой точностью.
После окончания операции 47 (фиг.4) проводят операцию 48 - передающую антенну 3 (фиг.1) поворачивают в положение φн (фиг.5в).
На фиг.5в показан данный вариант сканирования передающей антенны 3 (фиг.1), при котором обеспечиваются условия:
После выполнения операции 48 (фиг.4) в вычислительном устройстве 26 (фиг.2) и блоке 29 радиоканала абонентской станции формируют информационный сигнал, который, как и в режиме 33 (фиг.3), представляет собой последовательность интервалов, заполненных радиосигналом несущей частоты.
Радиосигнал принимают и преобразуют в блоке 18 (фиг.1) радиоканала ретранслятора. В вычислительном устройстве 14 (фиг.1) ретранслятора и вычислительном устройстве 26 (фиг.2) абонентской станции в соответствии с данным информационным сигналом осуществляют включение нового дополнительного режима 36 (фиг.3) - сканирование передающей антенны ретранслятора по азимуту.
Если при выполнении операции 47 (фиг.4) условие (7) не выполняется, то производят операцию 49 - разворот передающей антенны 3 (фиг.1) в том же направлении (против часовой стрелки) и измерение в данном положении φ21 (фиг.5б) сигнала UC21.
Последующие операции для этого направления на фиг.4 не показаны, поскольку они аналогичны операциям, выполняемым после операции 43 (фиг.4).
При результате «нет» операции 42 после проведения операции 43 в вычислительном устройстве 26 (фиг.2) в течение интервала Δtu3 последовательно осуществляют операции 50 и 51 (фиг.4). В результате проведения операции 50 находят разность сигналов:

Затем проводят оценку найденной разности ΔUC11 (операция 51).
Если выполняется условие:

то это означает, что положение φ1 передающей антенны 3 (фиг.1) соответствует направлению на абонентскую станцию с требуемой точностью.
После окончания операции 51 в этом случае производят операцию 52 - перевод передающей антенны 3 (фиг.1) в положение φ1, соответствующее сигналу UC1.
На фиг.5г показан данный вариант сканирования передающей антенны 3 (фиг.1), при котором обеспечиваются условия:
После выполнения операции 52 (фиг.4) осуществляют включение режима 36 (фиг.3) аналогично тому, как это производят после выполнения операции 48 (фиг.4).
Если условие (10) не выполняется (результат «нет» операции 51), то проводят операцию 53 - разворот передающей антенны 3 (фиг.1) по часовой стрелке в положение φ12 (фиг.5а), в котором в абонентской станции измеряют сигнал UC12 в течение интервала Δtu2.
Затем в вычислительном устройстве 26 (фиг.2) при положении передающей антенны 3 (фиг.1) φ12 последовательно в течение интервала Δtu3 проводят операцию 54 (фиг.4) - определение разности сигналов:

и операцию 55 - оценку разности ΔUC12.
Если в результате операции 55 условие
выполняется (результат «да» операции 55), то это означает, что положение φ11 передающей антенны 3 (фиг.1) соответствует направлению на абонентскую станцию с требуемой точностью.
После окончания операции 55 (фиг.4) проводят операцию 56 - передающую антенну 3 (фиг.1) поворачивают в положение φ11, соответствующее сигналу UC11.
После проведения операции 56 (фиг.4) осуществляют включение режима 36 (фиг.3) аналогично тому, как это производят после выполнения операций 48 и 52 (фиг.4).
Если при выполнении операции 55 условие (13) не выполняется, то проводят следующие операции, которые аналогичны операциям 53, 54, 55 и на фиг.4 не показаны.
В общем случае при повороте передающей антенны 3 (фиг.1) по часовой стрелке ее направлению на абонентскую станцию с требуемой точностью соответствует первое положение φi, при котором выполняется условие:

На фиг.5а сигнал  соответствует указанному положению передающей антенны 3 (фиг.1) φi, а сигнал
соответствует указанному положению передающей антенны 3 (фиг.1) φi, а сигнал  - следующему положению φ(i+1). Без учета ошибок измерений данное дискретное положение φi соответствует максимуму сигнала, принимаемого абонентской станцией.
- следующему положению φ(i+1). Без учета ошибок измерений данное дискретное положение φi соответствует максимуму сигнала, принимаемого абонентской станцией.
В данном режиме, как и в режиме 31 (фиг.3), разность двух соседних сигналов, измеряемых абонентской станцией, должна быть больше суммарной ошибки определения этой разности.
Суммарная ошибка Δ∑ разности двух соседних сигналов включает случайные составляющие: ΔUCC - ошибка, обусловленная шумом приемного тракта, преобразованием сигнала, а также неточностью выставки передающей антенны 3 (фиг.1) ретранслятора, связанной с погрешностью датчика угла и ошибкой отработки заданного угла, ΔUПА - ошибка, вызванная изменением сигнала из-за потерь в атмосфере при воздействии осадков, определяемая с помощью формул (2) и (3). Каждый из сигналов измеряют с ошибкой Δi, которая равна Δ∑/√2.
Для рассматриваемого примера ошибка AUCC измеряемого сигнала составляет 0,44·10-2UСМ, а для разности двух сигналов ошибка равна: ΔUCC√2 или 0,63·10-2UСМ.
Для разности сигналов ошибка ΔUПА составляет: 0,33·10-2UСМ при Δtu1=1 с, Δtд=0,1 с и максимальной скорости V, равной 0,3% в секунду. Суммарная ошибка ΔΣ при этом равна: 0,7·10-2UСМ. Разность двух соседних сигналов на пологом участке диаграммы направленности в пределах ±0,2 φДН относительно положения, соответствующего максимуму сигнала, составляет 1,5·10-2UСМ.
Возможен случай, когда на пологом участке диаграммы направленности антенны 19 (фиг.2) ошибка Δ∑ превышает допустимую величину. В этом случае в режиме 35 (фиг.3), так же как и в режиме 31, для уменьшения ошибки Δ∑ используют повторные измерения. Проведение повторных измерений вводят в программы вычислительных устройств 14 (фиг.1) и 26 (фиг.2). Их проводят в режимах 35 (фиг.3) и 36 при величине сигнала, принимаемого абонентской станцией, превышающей заданную минимальную величину.
Из фиг.5в, г видно, что при отсутствии ошибок измерений максимальная ошибка наведения передающей антенны 3 (фиг.1) на абонентскую станцию ΔφНА составляет половину шага Δφш. Это означает, что максимальное отклонение положения φНА передающей антенны 3, соответствующего направлению на абонентскую станцию от положения φм, составляет ½ Δφш.
Например, если положение φНА соответствует φН (фиг.5в), то ошибка этого положения ΔφНА максимальна при ΔUCH=UC1.
Из-за ошибки измерений сигнала, принимаемого абонентской станцией, ошибка наведения передающей антенны 3 (фиг.1) возрастает.
Ошибка измерений Δi сигнала UCi соответствует угловой ошибке, которую находят из формулы:

где S - крутизна диаграммы направленности.
Максимальная ошибка наведения передающей антенны 3 на абонентскую станцию ΔφHА представляет собой сумму случайных ошибок:
Ее находят с помощью формулы:

Формула (16) справедлива также при оценке точности наведения передающей антенны 3 (фиг.1) в режиме 36 (фиг.3) и приемной антенны 1 (фиг.1) в режиме 31 (фиг.3).
Для рассматриваемого примера крутизна диаграммы направленности передающей антенны 3 (фиг.1) на пологом участке равна 0,32UCH/φДН. При ширине диаграммы направленности φДН, равной 60 угловых минут, угловая ошибка Δφi составляет 0,9 угловых минут. Максимальная ошибка наведения передающей антенны 3 на абонентскую станцию в соответствии с формулой (16) составляет 1,7 угловых минут.
После проведения режима 35 аналогично ему осуществляют дополнительный режим 36 - сканирование передающей антенны ретранслятора по азимуту.
Сканирование передающей антенны 3 (фиг.1) по азимуту проводят в соответствии с подпрограммой, изображенной на фиг.4. При этом в качестве начального значения сигнала UCH используется сигнал, соответствующий положению передающей антенны 3 (фиг.1) после окончания режима 35 (фиг.3). Время измерения сигнала UCH и последующих измерений составляет Δtu2.
После установки в режиме 36 передающей антенны 3 (фиг.1) в требуемое положение, характеризуемое максимумом сигнала, принимаемого абонентской станцией, в вычислительном устройстве 26 (фиг.2) и блоке 29 радиоканала абонентской станции формируют сигнал, фиксирующий окончание данного режима и переход к следующим режимам. Формирование сигнала и его передачу с помощью дополнительного радиоканала на ретранслятор осуществляют аналогично режиму 33 (фиг.3). В вычислительном устройстве 14 (фиг.1) и вычислительном устройстве 26 (фиг.2) в соответствии с данным сигналом осуществляют одновременное включение двух дополнительных режимов: 37 (фиг.3) - контроль сигнала, принимаемого ретранслятором, 38 - контроль сигнала, принимаемого абонентской станцией.
В режимах 37 и 38 постоянно контролируют значения указанных сигналов. При изменении сигнала, превышающем допустимую величину, проводят измерение угловой ошибки наведения соответствующей антенны.
Если угловая ошибка наведения превышает допустимую величину, то производят коррекцию положения антенны 1 или 3 (фиг.1). Тем самым компенсируют уходы основания ретранслятора, а для приемной антенны 1 также отслеживают изменение положения КА на орбите.
Работу в режимах 37 и 38 (фиг.3) осуществляют автономно.
В результате проведения режимов 30, 31, 32, 33, 34, 35 и 36 осуществляют начальное наведение (при вводе ретранслятора) приемной и передающей антенн 1 и 3 (фиг.1) ретранслятора.
После этого при эксплуатации ретранслятора проводят режимы 37, 38, передачи радиотелевизионного сигнала, а также режимы 31, 35 и 36.
Сигналы в вычислительном устройстве 14 (фиг.1) и 26 (фиг.2), используемые для включения режимов 37 (фиг.3) и 38 и характеризующие окончание начального наведения приемной и передающей антенн 1 и 3 (фиг.1), отражают на устройствах 15 и 27 (фиг.2) индикации.
В режиме 37 (фиг.3) точность наведения приемной антенны 1 (фиг.1) на источник сигнала контролируют с помощью блока 5 и вычислительного устройства 14.
В режиме 38 (фиг.3) точность наведения передающей антенны 3 (фиг.1) контролируют по сигналу, принимаемому абонентской станцией, с помощью блока 21 (фиг.2) и вычислительного устройства 26.
В режимах 37 и 38 (фиг.3) в течение одинаковых интервалов времени, соответственно Δtu4 и Δtu5, проводят измерение и осреднение принимаемого сигнала.
Величину сигнала, измеренную в первом интервале Δtu4 или Δtu5, фиксируют в вычислительном устройстве 14 (фиг.1) или 26 (фиг.2) и используют как начальное значение сигнала при контроле.
Уходы основания ретранслятора приводят к уменьшению сигнала, принимаемого приемной антенной 1 (фиг.1) ретранслятора и антенной 19 (фиг.2) абонентской станции.
Если источником сигнала для ретранслятора является КА, то изменение положения КА на орбите также приводит к уменьшению принимаемого сигнала. Изменение потерь сигнала в атмосфере может привести как к уменьшению, так и к увеличению принимаемого сигнала.
Через каждый интервал времени Δtu4 или Δtu5 в вычислительном устройстве 14 (фиг.1) или 26 (фиг.2) проводят сравнение текущего и начального значений сигнала.
Если текущее измеренное значение превышает начальное значение сигнала, то в вычислительном устройстве 14 (фиг.1) или 26 (фиг.2) прежнее начальное значение заменяют на большее по величине значение, которое становится начальным.
Если уменьшение измеряемого сигнала превышает допустимое значение, то осуществляют контроль положения приемной антенны 1 (фиг.1) или передающей антенны 3. Поиск максимума принимаемого сигнала и коррекцию положения соответствующей антенны проводят сначала по углу места, а потом по азимуту.
Для нахождения максимума сигнала и коррекции положения приемной антенны 1 (фиг.1) по углу места и азимуту используют вышеописанный при начальном наведении ретранслятора режим 31 (фиг.3) с начальным определением направления поиска максимума сигнала. Коррекцию положения приемной антенны 1 (фиг.1) проводят путем ее поворота в положение, соответствующее максимуму принимаемого сигнала по соответствующему углу, если это найденное положение отличается от начального. При этом ошибка коррекции равна ошибке точного наведения.
Если величина сигнала меняется только из-за потерь сигнала в атмосфере, то положение приемной антенны 1 остается прежним с учетом ошибки точного наведения.
После проведения операции контроля положения приемной антенны 1 по углу места и азимуту, включая возможную коррекцию этого положения, в вычислительном устройстве 14 прежнее начальное значение сигнала меняют на вновь измеренное в течение интервала Δtu4.
При уменьшении в абонентской станции измеряемого сигнала, превышающего допустимое значение, с помощью вычислительного устройства 26 (фиг.2) и блока 29 радиоканала абонентской станции формируют сигнал, который передают на ретранслятор через дополнительный радиоканал. По этому сигналу последовательно проводят режимы 35 (фиг.3) и 36. В результате их проведения находят максимум сигнала по углу места и азимуту. Положение передающей антенны 3 (фиг.1) корректируют путем ее поворота в положение, соответствующее максимуму принимаемого сигнала, если это найденное положение по соответствующему углу отличается от начального. При этом ошибка коррекции равна ошибкам наведения в режимах 35 (фиг.3) и 36.
Если величина сигнала меняется только из-за потерь сигнала в атмосфере, то положение передающей антенны 3 (фиг.1) остается прежним с учетом ошибок наведения в режимах 35 (фиг.3) и 36.
После проведения операции контроля положения передающей антенны 3 (фиг.1) по углу места и азимуту, включая возможную коррекцию этого положения, в вычислительном устройстве 26 (фиг.2) прежнее начальное значение сигнала меняют на вновь измеренное в течение интервала Δtu5.
В предлагаемом способе благодаря использованию обратной связи через дополнительный радиоканал повышена точность наведения передающей антенны 3 на абонентскую станцию по сравнению с прототипом за счет компенсации навигационных ошибок, ошибки местонахождения КА на орбите и ошибки негоризонтальности.
Погрешность направления оптической оси передающей антенны 3 на абонентскую станцию по углу места и азимуту при проведении операции наведения определяют с помощью формулы (16).
Для рассматриваемого примера ретранслятора допустимая погрешность наведения передающей антенны 3 на абонентскую станцию составляет 0,2 φДН или 12 угловых минут. Это соответствует изменению сигнала по сравнению с максимумом UСМ на 6·10-2UСМ.
В случае превышения допустимого изменения измеряемого сигнала при реализации режима 38 (фиг.3) производят разворот передающей антенны 3 (фиг.1) на один шаг в обе стороны. Поэтому допустимая погрешность наведения должна обеспечивать запас на один шаг, т.е. не превышать 0,15 φДН. При этом допустимое изменение сигнала составляет 4,5·10-2UСМ.
Уменьшение сигнала, принимаемого абонентской станцией, превышающее допустимое, может быть вызвано уходом основания ретранслятора и потерями в атмосфере из-за осадков. Ошибка операции измерения сигнала при постоянном контроле включает случайные составляющие: ошибку, вызванную шумом приемного тракта, ошибку положения передающей антенны 3, обусловленную погрешностью датчика угла и погрешностью отработки заданного угла, а также ошибку обработки сигнала.
Для рассматриваемого примера интервал времени измерения сигнала Δtu5 равен 1 секунде. При этом, как отмечалось, ошибка измерения составляет 0,44·10-2UСМ, что соответствует угловой ошибке 0,0145 φДН или 0,88 угловых минут. С учетом случайной ошибки наведения, равной 0,028 φДН или 1,7 угловых минут, суммарная случайная ошибка измерения сигнала и наведения равна 0,95·10-2UСМ, что соответствует угловой ошибке 0,032 φДН или 1,9 угловых минут.
Допустимое уменьшение измеряемого сигнала при этом равно 3,55·10-2UСМ. Допустимый уход передающей антенны 3, который равен уходу основания ретранслятора, зависит от потерь сигнала в атмосфере. Допустимый уход максимален при отсутствии потерь и составляет 0,118 φДН или 7,1 угловых минут.
Указанная величина является измеренной допустимой величиной ухода основания ретранслятора, которая соответствует максимально допустимой разности измерений сигнала. Фактическая величина ухода основания ретранслятора с учетом указанной суммарной погрешности составляет (0,118±0,032) φДН или (7,1±1,9) угловых минут.
В прототипе угловые уходы основания ретранслятора относительно двух взаимно перпендикулярных осей в горизонтальной плоскости находят с помощью угломестного канала приемной антенны и дополнительного датчика угла. Погрешность угломестного канала приемной антенны больше, чем дополнительного датчика угла, поскольку она включает ошибку положения КА на орбите или при использовании наземного источника сигнала навигационную ошибку.
Погрешность наведения передающей антенны на абонентскую станцию по углу места находят для случая, когда оптические оси приемной и передающей антенн ретранслятора находятся в одной плоскости. При этом уход основания по углу места определяют с помощью приемной антенны, а ошибка наведения максимальна.
Уходы основания ретранслятора по азимуту в прототипе определяют с помощью сигнала азимутального канала приемной антенны.
В прототипе изменение сигнала, принимаемого приемной антенной ретранслятора, может быть вызвано уходом основания ретранслятора, потерями в атмосфере из-за осадков, а также изменением положения КА на орбите, если КА является источником сигнала. Изменение положения передающей антенны ретранслятора относительно абонентской станции по углу места и азимуту определяют по положению приемной антенны ретранслятора после точного наведения на источник сигнала и по результатам измерений дополнительного датчика угла. Коррекцию положения передающей антенны по углу места и азимуту проводят, если найденное изменение превышает допустимую величину по соответствующему углу. Погрешность коррекции определяется для приемной антенны ошибкой точного наведения, а для передающей антенны ошибкой программного наведения передающей антенны и ошибкой точного наведения приемной антенны.
Для прототипа суммарную погрешность операции наведения передающей антенны на абонентскую станции по углу места ΔУМ∑ при использовании наземного источника сигнала определяют с помощью формулы:

где ΔГП - ошибка негоризонтальности при начальной выставке ретранслятора,
ΔТП - ошибка точного наведения приемной антенны на источник сигнала,
ΔН1 - навигационная ошибка положения ретранслятора и наземного источника сигнала по углу места,
ΔПН - ошибка программного наведения передающей антенны на абонентскую станцию,
ΔН2 - навигационная ошибка положения ретранслятора и абонентской станции по углу места.
Для рассматриваемого примера принимаем, что в прототипе, как и в предлагаемом способе, используют дискретный разворот приемной и передающей антенн с аналогичными техническими характеристиками. Ошибка ΔГП принимается равной 1 угловой минуте.
Навигационную ошибку ΔН1 находят с помощью формулы:
где Δh - погрешность нахождения вертикальной координаты (по уровню 3σ) наземного источника сигнала и ретранслятора,
L - расстояние между наземным источником сигнала и ретранслятором (проекция в горизонтальной плоскости).
При Δh=20 м и L=15 км или L=20 км навигационная ошибка ΔН1 равна соответственно 6,2 или 4,7 угловых минут.
Ошибка ΔПН включает погрешность дискретности (половина шага) и погрешность выставки передающей антенны (ошибки датчика угла и отработки заданного угла), она составляет 1,6 угловых минут.
Ошибка ΔТН определяется с помощью формулы (16), ее величина равна 1,7 угловых минут.
Ошибка ΔН2 принимается равной ΔН1, вводится обозначение ΔH1=ΔН2=ΔН.
Суммарная погрешность ΔУМ∑ при использовании наземного источника сигнала при ΔН=6,2 угловых минут равна 9,1 угловых минут, а при ΔН=4,7 угловых минут равна 7,1 угловых минут.
При использовании в качестве источника сигнала КА в формуле (17) ошибка ΔН1 заменяется на ошибку ΔКА, величина которой составляет 12 угловых минут. Погрешность ΔУМ∑ при этом равна 13,7 угловых минут при ΔН=6,2 угловых минут и 13,2 угловых минут при ΔН=4,7 угловых минут.
Поскольку положение ретранслятора, наземного источника сигнала и абонентской станции при эксплуатации не меняется, то указанные навигационные ошибки имеют место при начальном наведении ретранслятора. Положение КА на орбите меняется при эксплуатации. При оценке точности наведения передающей антенны ретранслятора на абонентскую станцию принимается погрешность положения КА максимальной и равной 12 угловых минут.
Суммарную погрешность операции наведения передающей антенны на абонентскую станцию по азимуту  при использовании наземного источника сигнала для прототипа определяют с помощью формулы:
при использовании наземного источника сигнала для прототипа определяют с помощью формулы:

где ΔН3 и ΔН4 - навигационные ошибки по азимуту соответственно положения ретранслятора и наземного источника сигнала, а также ретранслятора и абонентской станции.
Для рассматриваемого примера в прототипе приняты одинаковыми соответственно ΔТН - ошибка точного наведения приемной антенны на источник сигнала по углу места и азимуту, ΔПН - ошибка программного наведения передающей антенны на абонентскую станцию по углу места и азимуту.
Также принимается ΔН3=ΔН4=ΔН.
Суммарная ошибка  при использовании наземного источника сигнала при ΔН=6,2 угловых минут равна 9,1 угловых минут и при ΔН=4,7 угловых минут равна 7 угловых минут.
при использовании наземного источника сигнала при ΔН=6,2 угловых минут равна 9,1 угловых минут и при ΔН=4,7 угловых минут равна 7 угловых минут.
При использовании в качестве источника сигнала КА в формуле (19) вместо ошибки ΔН3 вводят ошибку ΔКА, величина которой составляет 12 угловых минут. При этом погрешность составляет 13,7 угловых минут при ΔН=6,2 угловых минут и 13,1 угловых минут при ΔН=4,7 угловых минут.
Для рассмотренного примера прототипа погрешность операции наведения передающей антенны на абонентскую станцию составляет от 7 до 13,7 угловых минут или от 0,117 φДН до 0,23 φДН при φДН=60 угловых минут. В предлагаемом способе данная погрешность равна 1,7 угловых минут.
Следовательно, погрешность операции наведения передающей антенны на абонентскую станцию по сравнению с прототипом уменьшилась в 4-8 раз.
Допустимая погрешность наведения передающей антенны на абонентскую станцию в прототипе, как и в предлагаемом способе, равна сумме допустимого ухода и погрешности операции наведения. Если в прототипе допустимый измеренный уход передающей антенны такой же, как и в предлагаемом способе, и составляет 0,118 φДН или 7,1 угловых минут, то допустимая погрешность наведения передающей антенны по углу места и азимуту на абонентскую станцию для прототипа составляет (0,235-0,348) φДН или (14,1-20,8) угловых минут.
Следовательно, погрешность наведения передающей антенны на абонентскую станцию в предлагаемом способе (0,2 φДН) уменьшилась по сравнению с прототипом в (1,2-1,7) раз.
Приведенное описание способа позволяет сделать следующее заключение.
Использование обратной связи по дополнительному радиоканалу при сканировании передающей антенны позволяет повысить точность наведения передающей антенны ретранслятора на абонентскую станцию благодаря компенсации ошибки положения КА, навигационных ошибок, ошибки негоризонтальности. Это приводит к повышению скорости передачи информации и улучшению помеховой обстановки.
Для рассматриваемых остронаправленных антенн точность наведения передающей антенны ретранслятора на абонентскую станцию по сравнению с прототипом повышается в (1,2-1,7) раз при одинаковых допустимых измеренных уходах основания ретранслятора. При этом погрешность операции наведения передающей антенны на абонентскую станцию уменьшается в 4-8 раз.
Применение способа позволяет скомпенсировать погрешности начальной выставки ретранслятора и использовать антенны с раздельными основаниями. Это приводит к уменьшению массы ретранслятора на 30-70 килограммов.
Упрощение начальной выставки ретранслятора позволяет уменьшить трудоемкость работ при начальной установке и эксплуатации ретранслятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДАЧИ РАДИОТЕЛЕВИЗИОННОГО СИГНАЛА | 2006 |
|
RU2308154C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2008 |
|
RU2368077C1 |
| СПОСОБ НАВЕДЕНИЯ АНТЕНН РЕТРАНСЛЯТОРА | 2006 |
|
RU2368076C2 |
| СПОСОБ НАВЕДЕНИЯ ПЕРЕДАЮЩЕЙ АНТЕННЫ РЕТРАНСЛЯТОРА НА АБОНЕНТСКУЮ СТАНЦИЮ | 2005 |
|
RU2308157C1 |
| СПОСОБ ПЕРЕДАЧИ СИГНАЛА СВЧ | 2008 |
|
RU2374764C1 |
| СПОСОБ НАВЕДЕНИЯ ПЕРЕДАЮЩЕЙ АНТЕННЫ РЕТРАНСЛЯТОРА | 2007 |
|
RU2328824C1 |
| УСТРОЙСТВО СВЧ-СВЯЗИ | 2005 |
|
RU2309542C2 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2009 |
|
RU2409893C2 |
| СИСТЕМА И СПОСОБ СЛЕЖЕНИЯ АНТЕННОЙ СИСТЕМЫ ЗЕМНОЙ СТАНЦИИ ПОДВИЖНОЙ СПУТНИКОВОЙ СВЯЗИ | 2023 |
|
RU2821956C1 |
| Станция (система) приёма и обработки информации от среднеорбитального сегмента космической системы поиска и спасания и способ управления наведением антенн этой станции | 2015 |
|
RU2622390C2 |
Изобретение относится к системам связи, предназначено для ретрансляции радиотелевизионных сигналов и может быть использовано для расширения зоны обслуживания в районах, где отсутствует или наблюдается неустойчивый прием радиотелевизионного сигнала. Технический результат заключается в повышении точности наведения передающей антенны ретранслятора на абонентскую станцию. Для этого производят наведение приемной антенны ретранслятора на источник сигнала, наведение передающей антенны ретранслятора на абонентскую станцию согласно рассчитанным углам места и азимута. Затем проводят наведение антенны абонентской станции на ретранслятор и с помощью команды через дополнительный радиоканал производят включение режима наведения антенны абонентской станции на ретранслятор, после чего с помощью команды через дополнительный радиоканал включают режим сканирования передающей антенны ретранслятора по углу места или азимута. При этом производят поворот антенны на один шаг с измерением величины сигнала в абонентской станции и определением разности текущего и начального значений сигналов, с помощью которой определяют в цикле положение, которое соответствует максимуму сигнала, принимаемого абонентской станцией. Затем проводят одновременное включение режимов контроля сигналов, принимаемых приемной антенной ретранслятора и абонентской станцией. При недопустимом уменьшении принимаемого сигнала нахождение максимума сигнала приемной антенны, а также коррекцию ее положения производят с помощью точного наведения по сигналу. 5 ил.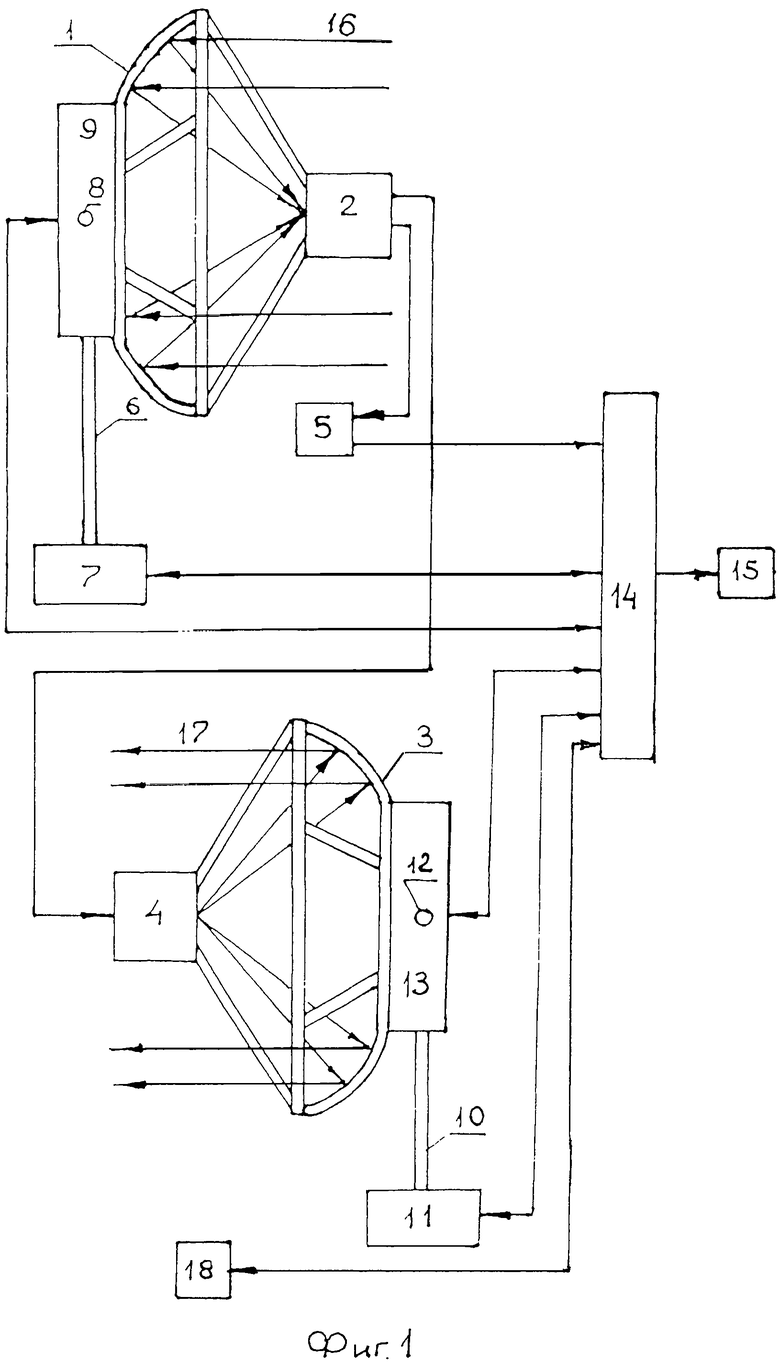
Способ передачи радиотелевизионного сигнала, включающий наведение приемной антенны ретранслятора на источник сигнала с использованием программного наведения и точного наведения по принимаемому сигналу, программное наведение передающей антенны ретранслятора на абонентскую станцию в соответствии с рассчитанными углом места и азимутом, а также проводимое после наведения передающей антенны ретранслятора наведение антенны абонентской станции на ретранслятор, осуществляемое последовательно путем предварительного программного наведения и точного наведения по принимаемому от ретранслятора сигналу, отличающийся тем, что после проведения программного наведения передающей антенны ретранслятора на абонентскую станцию с помощью команды, подаваемой на абонентскую станцию от ретранслятора через дополнительный радиоканал, включающий блок радиоканала ретранслятора и блок радиоканала абонентской станции, производят включение режима наведения антенны абонентской станции на ретранслятор, а после проведения этого режима с помощью команды, подаваемой на ретранслятор от абонентской станции через дополнительный радиоканал, включают режим сканирования передающей антенны ретранслятора по углу места, при этом сначала проводят измерение сигнала, принимаемого абонентской станцией, в начальном положении передающей антенны ретранслятора, затем производят поворот передающей антенны в одну сторону на один шаг с измерением текущей величины сигнала в абонентской станции и определением разности текущего и начального значений сигналов, если найденная разность положительная, то с помощью команды, подаваемой на ретранслятор от абонентской станции через дополнительный радиоканал, продолжают разворот передающей антенны последовательно на один шаг в ту же сторону для поиска максимума сигнала, принимаемого абонентской станцией, при этом для каждого положения передающей антенны ретранслятора в абонентской станции осуществляют измерение величины сигнала и определение разности текущего и предшествующего значений сигнала, разворот передающей антенны прекращают при отрицательной разности текущего и предшествующего значений сигнала в абонентской станции, при этом по команде, передаваемой через дополнительный радиоканал от абонентской станции в ретранслятор, передающую антенну ретранслятора переводят в предшествующее положение, которое соответствует требуемому направлению на абонентскую станцию и максимуму сигнала, принимаемого абонентской станцией, после чего в ретрансляторе формируют команду на проведение режима сканирования передающей антенны ретранслятора по азимуту, которую передают на абонентскую станцию через дополнительный радиоканал, если разность текущего значения сигнала, принимаемого абонентской станцией, соответствующего повороту передающей антенны ретранслятора по углу места на первый шаг, и начального значения сигнала отрицательная, то проводят поворот передающей антенны по углу места в обратную сторону до нахождения положения, соответствующего максимуму принимаемого сигнала, если при данном повороте текущее значение сигнала уменьшается по сравнению с предыдущим значением при повороте передающей антенны на два шага, то передающую антенну переводят в начальное положение, которое соответствует максимуму сигнала, принимаемого абонентской станцией, затем аналогично режиму сканирования передающей антенны по углу места осуществляют режим сканирования передающей антенны ретранслятора по азимуту, после установки передающей антенны в требуемое положение по углу места и азимуту, характеризуемое максимумом сигнала, принимаемого абонентской станцией, с помощью дополнительного радиоканала осуществляют одновременное включение проводимых автономно режима контроля сигнала, принимаемого приемной антенной ретранслятора, и режима контроля сигнала, принимаемого абонентской станцией, измерение и осреднение указанных сигналов проводят в заданные интервалы времени, величины сигналов, измеренные в первые интервалы времени, используют как начальные значения, если уменьшение текущего значения сигнала, принимаемого приемной антенной ретранслятора, по сравнению с начальным значением превышает допустимую величину, то для нахождения максимума принимаемого сигнала последовательно по углу места и азимуту используют точное наведение по сигналу, коррекцию положения приемной антенны ретранслятора по углу места и азимуту проводят, если найденное положение, соответствующее максимуму принимаемого сигнала, отличается по соответствующему углу от начального положения, затем в вычислительном устройстве ретранслятора прежнее начальное значение сигнала заменяют на измеренное после проведения операций контроля и коррекции положения приемной антенны, при превышении в абонентской станции разностью начального и текущего значений сигнала допустимой величины с помощью дополнительного радиоканала в абонентской станции формируют команды, по которым последовательно проводят режимы сканирования передающей антенны ретранслятора по углу места и азимуту, с помощью этих режимов находят максимум сигнала по углу места и азимуту, принимаемого абонентской станцией, коррекцию положения передающей антенны ретранслятора по углу места и азимуту проводят, если найденное положение, соответствующее максимуму сигнала, принимаемого абонентской станцией, отличается по соответствующему углу от начального положения, затем в вычислительном устройстве абонентской станции прежнее начальное значение сигнала, принимаемого абонентской станцией, заменяют на измеренное после проведения операций контроля и коррекции положения передающей антенны ретранслятора.
| СПОСОБ НАВЕДЕНИЯ АНТЕНН РЕТРАНСЛЯТОРА | 2006 |
|
RU2368076C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ АНТЕННЫ | 1995 |
|
RU2217847C2 |
| US 2011050487 А1, 03.03.2011 | |||
| WO 9626607 А1, 29.08.1996. | |||

