Изобретение относится к системам связи и может быть использовано для расширения зоны обслуживания в районах, где из-за рельефа местности отсутствует или наблюдается неустойчивый прием радиотелевизионного сигнала СВЧ. Прямому прохождению сигнала при этом препятствует наличие холма или горной преграды, а также то, что приемная станция может находиться в ложбине. В таких случаях используют специальные линии СВЧ-связи и ретрансляторы. Источником радиотелевизионного сигнала может быть наземный источник или космический аппарат (КА).
Известны способы передачи информации, реализованные станциях спутниковой связи, в частности, в станции «Орбита», предназначенных для приема телевидения (Покрас A.M., Сомов A.M., Цуриков Г.Г. Антенны земных станций спутниковой связи. - М.: Радио и связь, 1985, с.22-27). Наведение антенн на КА в этих станциях производится следящими электроприводами в режимах автоматического автосопровождения, управления от программного устройства или полуавтоматического управления. В станции используется параболическая зеркальная антенна, размещенная в двухосном азимутально-угломестном опорно-поворотном устройстве.
Недостатками такого способа передачи информации являются значительные массогабаритные характеристики и энергопотребление, а также относительно высокая стоимость станции. Это обусловлено техническими характеристиками станции, прежде всего большой скоростью приема информации и высокой точностью наведения антенны.
Известны наземные станции спутниковой связи, которые обычно представляют собой приемопередающие радиостанции с одной общей параболической антенной (на прием и на передачу) (Бартенев В.А., Болотов Г.В., Быков В.Л. и др. Под редакцией Кантора Л.А. Спутниковая связь и вещание. - М.: Радио и связь, 1997, с.404-409). В этих станциях используются способы передачи информации, при которых осуществляют режим программного наведения в заданную точку пространства, режим поиска и захвата сигнала, а также режим точного наведения по принимаемому сигналу (режим автосопровождения). В режиме точного наведения могут использоваться различные методы наведения по принимаемому сигналу: метод экстремального наведения, моноимпульсный метод и др.
Недостатками данных способов являются: сравнительно большое энергопотребление, значительные массогабаритные характеристики и относительно высокая стоимость станции.
Прототипом изобретения является способ передачи информации, реализованный в станции спутниковой связи предприятия ЗАО «Полюс», содержащей параболическую зеркальную антенну с СВЧ-блоком и блоками азимутальной и угломестной осей, блок наведения антенны, устройства индикации, устройство ввода данных, вычислительное устройство, снабженное программами, включая наведение антенны (Фролов О.П. Антенны для земных станций спутниковой связи. - М.: Радио и связь, 2000, с.260-265).
В данном способе проводят программное наведение антенны по углу места и азимуту в заданную точку пространства. Также осуществляют операцию поиска и захвата сигнала по углу места и азимуту. После захвата сигнала проводят точное наведение антенны на источник сигнала.
Программное наведение антенны по углу места и азимуту производят путем разворота антенны на рассчитанные в вычислительном устройстве углы от базовых измерительных плоскостей:
- плоскости горизонта - для угла места;
- плоскости меридиана - для азимута.
Недостатками данного способа передачи информации являются относительно большое энергопотребление, значительные массогабаритные характеристики и стоимость аппаратуры.
Задачей предлагаемого изобретения является упрощение аппаратуры ретранслятора, снижение его энергопотребления, массогабаритных характеристик и стоимости. Снижение энергопотребления особенно важно при установке ретрансляторов в отдаленных районах, где необходимо использовать автономные источники электроэнергии, что существенно увеличивает массу, габариты и стоимость ретранслятора.
Достигаемый при этом технический результат заключается в упрощении аппаратуры ретранслятора, снижении его энергопотребления, уменьшении массы и габаритов.
Для достижения указанного технического результата предложен способ передачи информации, включающий программное наведение приемной антенны ретранслятора на источник сигнала путем разворота приемной антенны по углу места и азимуту на программный угол, с ее последующим точным наведением на источник сигнала, а также программное наведение передающей антенны ретранслятора на абонентскую станцию в соответствии с рассчитанными азимутом и углом места, при этом перед программным разворотом приемной антенны по углу места на источник сигнала осуществляют режим масштабирования, при котором проводят разворот приемной антенны по углу места на рассчитанный угол и фиксацию ее положения, причем разворот производят в режиме второй скорости, которая в 4-10 раз меньше скорости первого режима, после этого в вычислительном устройстве осуществляют сравнение рассчитанного угла с фактическим значением угла, измеренным с помощью угломестной шкалы приемной антенны и введенным в вычислительное устройство, в результате чего определяют поправку на угловую скорость, которую учитывают при программном развороте приемной антенны по углу места в режиме второй скорости, после этого на устройствах индикации отображают рассчитанные углы места источника сигнала и абонентской станции, затем производят программный разворот приемной антенны на источник сигнала по углу места и фиксацию ее положения, разворот проводят в режиме первой скорости, если величина программного угла места больше рассчитанного граничного значения, или в режиме второй скорости, при этом, в соответствии с отображенным на устройстве индикации рассчитанным значением угла места источника сигнала и показанием угломестной шкалы приемной антенны, проводят одну или две коррекции положения приемной антенны с доведением угла места до рассчитанного значения и фиксацией этого положения приемной антенны, затем осуществляют режим масштабирования программного разворота приемной антенны по азимуту аналогично режиму масштабирования по углу места, после этого проводят разворот приемной антенны по азимуту в режиме первой скорости, производят измерение максимального значения сигнала, излучаемого источником сигнала, после чего через заданный угол после прохождения максимального значения сигнала останавливают приемную антенну и фиксируют ее положение, затем осуществляют поворот приемной антенны в режиме второй скорости в обратную сторону с остановкой и фиксацией ее положения при увеличении сигнала до граничного значения, составляющего от 30 до 70 процентов от максимального значения, вводят в вычислительное устройство значение азимута, измеренного с помощью азимутальной шкалы приемной антенны, после этого проводят поворот приемной антенны в режиме второй скорости в том же направлении с остановкой и фиксацией ее положения через заданный угол с прохождением максимального значения сигнала и второго граничного значения, равного первому, после остановки проводят поворот приемной антенны в обратном направлении в режиме второй скорости с остановкой и фиксацией положения при увеличении сигнала до второго упомянутого граничного значения, вводят в вычислительное устройство значение азимута, измеренного с помощью азимутальной шкалы приемной антенны, по найденным двум значениям азимута в вычислительном устройстве определяют азимут источника сигнала, который используют для программного наведения передающей антенны по азимуту на абонентскую станцию, после чего отображают на устройствах индикации найденный азимут источника сигнала и рассчитанный азимут абонентской станции, затем, в соответствии с отображенным на устройстве индикации азимутом источника сигнала и показанием азимутальной шкалы приемной антенны, проводят одну или две коррекции положения приемной антенны с доведением азимута до найденного значения и фиксацией этого положения приемной антенны, после этого проводят режим масштабирования программного разворота передающей антенны по углу места аналогично режиму масштабирования программного разворота приемной антенны по углу места, затем осуществляют программный разворот передающей антенны по углу места на абонентскую станцию и фиксацию ее положения аналогично программному развороту приемной антенны по углу места, при этом, в соответствии с отображенным на устройстве индикации рассчитанным значением угла места абонентской станции и показанием угломестной шкалы передающей антенны, проводят одну или две коррекции положения передающей антенны с доведением угла места до рассчитанного значения и фиксацией этого положения передающей антенны, после этого осуществляют режим масштабирования программного разворота передающей антенны по азимуту аналогично режиму масштабирования программного разворота передающей антенны по углу места, затем проводят программный разворот передающей антенны по азимуту на абонентскую станцию и фиксацию ее положения аналогично программному развороту передающей антенны по углу места, при этом, в соответствии с отображенным на устройстве индикации рассчитанным значением азимута абонентской станции и показанием азимутальной шкалы передающей антенны, проводят одну или две коррекции положения передающей антенны с доведением азимута до рассчитанного значения и фиксацией этого положения передающей антенны, затем осуществляют передачу радиотелевизионного сигнала.
Предлагаемый способ реализуется в ретрансляторе благодаря использованию специальных режимов наведения приемной антенны на источник сигнала и передающей антенны на абонентскую станцию. Способ иллюстрируется функциональной схемой ретранслятора, приведенной на фиг.1, блок-схемой режимов наведения приемной и передающей антенн, приведенной на фиг.2, блок-схемой подпрограммы программного разворота приемной антенны из исходного положения на источник сигнала по углу места, приведенной на фиг.3.
Предлагаемое изобретение относится к ретрансляторам, характеризующимся относительно невысокой скоростью передачи информации, имеющим сравнительно небольшой диаметр зеркала и относительно широкую диаграмму направленности антенны (порядка 1,5-4 градусов). В качестве примера рассматривается ретранслятор, имеющий ширину диаграммы направленности приемной и передающей антенн 120 угловых минут.
Для частот 3-6 ГГц диаметр антенны ретранслятора составляет от 3,5 до 1,75 метров.
Достаточно высокой считается точность наведения антенны с потерями по мощности 0,5 дб, что соответствует погрешности наведения, равной ±0,2 ширины диаграммы направленности антенны. Для рассматриваемого примера это соответствует ошибке наведения ±24 угловые минуты.
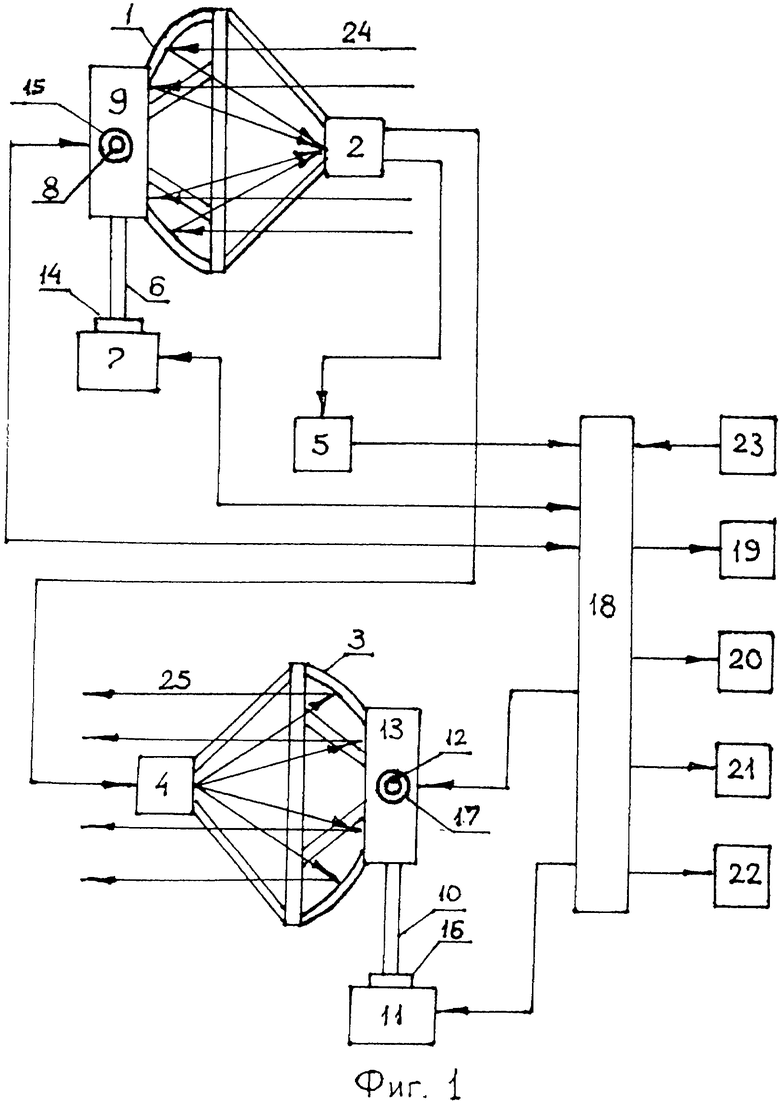
Ретранслятор, изображенный на фиг.1, содержит приемную антенну 1, на которой установлен СВЧ-блок 2 приемной антенны, соединенный с размещенным на передающей антенне 3 СВЧ-блоком 4 передающей антенны. СВЧ-блок 2 и СВЧ-блок 4 предназначены для преобразования частоты, усиления и фильтрации ретранслируемого СВЧ-сигнала. Второй выход СВЧ-блока 2 приемной антенны подсоединен к блоку 5 наведения приемной антенны, служащему для преобразования СВЧ-сигнала в сигнал, используемый для точного наведения приемной антенны 1. Для управления по азимутальной оси 6 приемной антенны ретранслятор содержит блок 7 азимутальной оси приемной антенны, а для управления по угломестной оси 8 приемной антенны - блок 9 угломестной оси приемной антенны. Для управления по азимутальной оси 10 передающей антенны ретранслятор содержит блок 11 азимутальной оси передающей антенны, а для управления по угломестной оси 12 передающей антенны - блок 13 угломестной оси передающей антенны. В состав блоков 7 и 9 приемной антенны и блоков 11 и 13 передающей антенны входят приводы, обеспечивающие поворот осей, а также тормозные муфты, используемые для торможения антенн и фиксации их положения.
На приемной антенне 1 ретранслятора установлены азимутальная шкала 14 приемной антенны и угломестная шкала 15 приемной антенны. На передающей антенне 3 ретранслятора установлены азимутальная шкала 16 передающей антенны и угломестная шкала 17 передающей антенны. Ретранслятор содержит также вычислительное устройство 18, предназначенное для управления приемной антенной 1 и передающей антенной 3 и соединенное с блоками 5, 7, 9, 11, 13. Кроме того, в состав ретранслятора входят подсоединенные к вычислительному устройству 18 устройство 19 индикации угла места источника сигнала, устройство 20 индикации азимута источника сигнала, устройство 21 индикации угла места абонентской станции, устройство 22 индикации азимута абонентской станции, а также устройство 23 ввода данных. Приемная антенна 1 ретранслятора предназначена для усиления принимаемого радиотелевизионного сигнала 24, приходящего от источника сигнала, а передающая антенна 3 - для усиления излучаемого радиотелевизионного сигнала 25, поступающего от ретранслятора на абонентскую станцию.
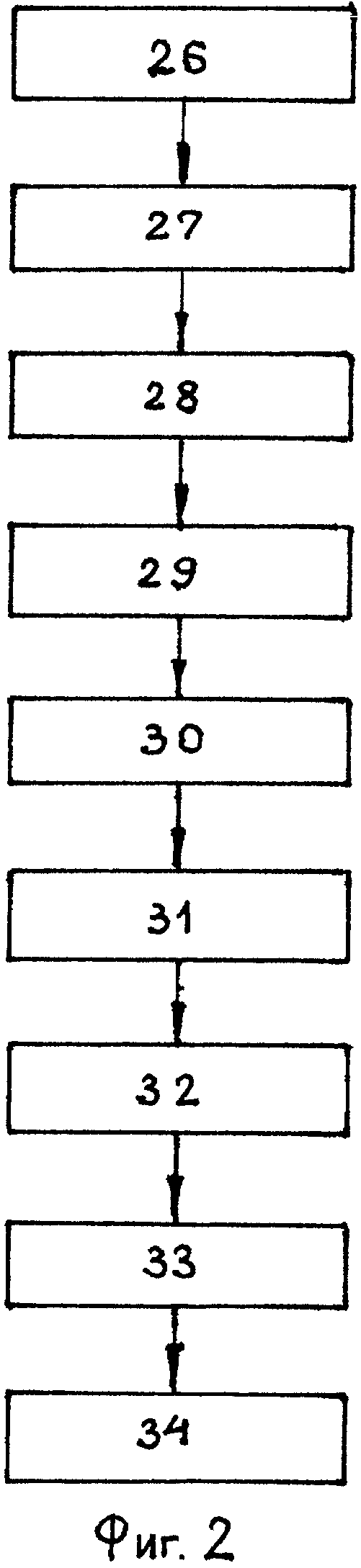
На фиг.2 изображена блок-схема режимов наведения приемной и передающей антенн ретранслятора: 26 - режим масштабирования программного разворота приемной антенны по углу места; 27 - режим программного разворота приемной антенны по углу места на источник сигнала; 28 - режим масштабирования программного разворота приемной антенны по азимуту; 29 - режим программного разворота приемной антенны по азимуту для захвата сигнала; 30 - режим точного наведения приемной антенны на источник сигнала по азимуту; 31 - режим масштабирования программного разворота передающей антенны по углу места; 32 - программное наведение передающей антенны на абонентскую станцию по углу места; 33 - режим масштабирования программного разворота передающей антенны по азимуту; 34 - программное наведение передающей антенны на абонентскую станцию по азимуту.
На фиг.2 показаны предложенные режимы наведения приемной и передающей антенн, использование которых позволит обеспечить получение указанного технического результата. Блок-схема отражает последовательность и взаимосвязь режимов.
При установке и вводе ретранслятора в эксплуатацию производится его начальная выставка. При этом обычно при помощи шайб и прокладок, а также измерительных средств (уровень, теодолит) осуществляется выставка азимутальных осей антенн перпендикулярно горизонтальной плоскости. Взаимная привязка азимутальных систем (нулевых азимутальных отсчетов) приемной и передающей антенн производится при изготовлении ретранслятора с помощью посадочных штифтов, если используется общее основание для обеих антенн. При раздельных основаниях антенн их азимутальная привязка осуществляется при установке ретранслятора с помощью теодолита и технологических зеркал. Привязка азимутальной измерительной системы ретранслятора к меридиану проводится с помощью дополнительных технических средств (магнитный компас, гирокомпас, радиокомпас и т.д.).
Предлагаемое изобретение позволяет отказаться от привязки азимутальной измерительной системы ретранслятора к меридиану и от дополнительных технических средств.
Рассматриваемые ретрансляторы устанавливаются на жестком основании. Приемная антенна 1 принимает радиотелевизионный сигнал 24 от КА или наземного источника. Положение наземного источника относительно ретранслятора не меняется при эксплуатации. Точность положения современных КА («Экспресс», «Галс») высока и составляет 3-6 угловых минут. В связи с указанным, при требуемой точности наведения приемной и передающей антенн 1 и 3 достаточно ограничиться начальным наведением этих антенн и зафиксировать положение антенн на время эксплуатации до проведения очередных регламентарных работ или ремонта. Фиксация положения приемной и передающей антенн 1 и 3 позволяет повысить экономичность ретранслятора, поскольку электропитание систем наведения указанных антенн отключают.
В предложенном способе для обеспечения требуемой точности наведения приемной и передающей антенн 1 и 3 на уровне ±0,2 ширины диаграммы направленности, учитывая относительно широкую диаграмму направленности рассматриваемых ретрансляторов, предлагается использовать более простую систему наведения антенн. Вместо обычно применяемой системы с датчиком угла, который является источником информации о положении антенны, используется программное управление длительностью сигнала, поступающего на двигатель постоянного тока, обеспечивающий поворот антенны. Это позволит отказаться от дорогостоящей аппаратуры: датчиков угла и устройств обработки информации. При этом также упрощается источник электропитания.
Точность отработки программного угла повышается благодаря повторным операциям (коррекции) в полуавтоматическом режиме с использованием устройств индикации и шкал. Такой режим допустим, поскольку начальная установка ретранслятора, выставка его осей и посадочных плоскостей, его включение и ввод данных в программу проводится обслуживающим персоналом.
Блоки 7, 9, 11 и 13 азимутальной и угломестной осей приемной и передающей антенн 1 и 3 снабжаются шкалами для визуального определения угла поворота соответствующей оси. В радиостанциях с направленными антеннами обычно шкалы используются для решения технологических задач. Погрешность шкалы составляет не более 10 угловых минут, что вполне допустимо для рассматриваемых ретрансляторов.
Для повышения скорости и обеспечения требуемой точности отработки программного угла приемной и передающей антенн 1 и 3 вводятся два режима: первой и второй скоростей поворота антенн. Первую скорость используют для отработки больших углов (до 360 градусов). Переход на вторую скорость проводят при граничном угле, величина которого вводится в память вычислительного устройства 18 при изготовлении ретранслятора.
Программное наведение антенн обычно состоит из трех этапов: разгона, установившегося режима и торможения. Разворот антенны включает только этапы разгона и торможения, если время разгона недостаточно для выхода на установившийся режим.
При этом, в частности, для программного разворота антенны по углу места (ΔУМП) справедливы следующие формулы:


где ΔУМр - угол поворота при разгоне, ΔУМур - угол поворота при установившемся режиме (постоянной скорости разворота), ΔУМт - угол поворота при торможении.
При линейной модели могут быть использованы формулы:



где ωм - максимальная угловая скорость антенны, Δtyp, Δtp, Δtт - соответственно - длительность этапов установившегося режима, разгона и торможения.
В данной линейной модели принимается, что скорость антенны меняется линейно: при разгоне - увеличивается, а при торможении - уменьшается.
В двигателе постоянного тока в установившемся режиме угловая скорость вращения ротора пропорциональна величине входного напряжения U. Поэтому величина угла поворота антенны (например, угла места), определяемая из формулы

пропорциональна интервалу времени Δt, который находят из выражения

В формулах (6) и (7) коэффициент пропорциональности Ки учитывает статическую угловую ошибку.
Статическая ошибка определяется трением, разбросом питания, потерями в обмотке ротора и другими составляющими. Динамическая ошибка, прежде всего, определяется инерционностью привода (двигателя, редуктора) и антенного устройства. Она образуется на этапах разгона и торможения.
Для рассматриваемых ретрансляторов при использовании относительно больших угловых скоростей (десятки градусов в секунду) при отработке небольших углов (1-5 градусов) определяющей является динамическая ошибка. Введение режима второй скорости решает задачу повышения точности наведения антенн. Для рассматриваемых ретрансляторов скорость этого режима выбирают в 4-10 раз меньше, чем скорость первого режима. При этом соответственно уменьшают напряжение, подаваемое на обмотку ротора. При отработке больших углов основной является статическая угловая ошибка.
Для торможения и фиксации положения приемной и передающей антенн 1 и 3 предлагается использовать тормозные муфты. Это позволяет существенно уменьшить ошибку при торможении антенны из-за сокращения времени остановки (торможения). Для рассматриваемых ретрансляторов при этом время торможения составляет 0,02±0,02 секунды. Постоянная времени привода равна 0,03-0,1 секунды, а время остановки антенны после снятия питания составляет 0,09-0,3 секунды.
Погрешность наведения приемной антенны 1 на источник сигнала по углу места складывается из ошибки горизонтирования ретранслятора, ошибки местонахождения (неопределенности положения) источника сигнала и ретранслятора, ошибки отработки программного угла, ошибки шкалы. Рассматривается наиболее распространенный случай, когда источником сигнала является КА.
Программное наведение передающей антенны 3 на абонентскую станцию по углу места осуществляется аналогично наведению приемной антенны 1. Различие заключается в том, что для передающей антенны 3 берется ошибка местонахождения абонентской станции и ретранслятора. При использовании спутниковой радионавигационной системы (ГЛОНАСС, GPS) эта ошибка обычно не превышает 6 угловых минут.
Наведение приемной антенны 1 на источник сигнала по азимуту осуществляется с использованием принимаемого сигнала. При этом погрешность наведения складывается из ошибки определения положения максимума сигнала (это положение соответствует азимуту источника сигнала), ошибки отработки заданного угла, ошибки шкалы, ошибки местонахождения КА.
Программное наведение передающей антенны 3 на абонентскую станцию по азимуту характеризуется большей погрешностью. В предлагаемом способе для привязки к меридиану используется направление приемной антенны 1 на источник сигнала. Погрешность программного наведения передающей антенны 3 на абонентскую станцию по азимуту складывается из ошибки определения положения источника сигнала по азимуту, ошибки местонахождения КА, ошибки местонахождения абонентской станции и ретранслятора, ошибки отработки программного угла, ошибки шкалы.
Проведем анализ точности программного наведения приемной антенны 1 на источник сигнала по углу места. При включении двигателя имеет место запаздывание (временной порог) - время, в течение которого сигнал не отрабатывается двигателем. Оно обусловлено запаздыванием из-за индуктивности обмотки якоря двигателя, а также запаздыванием схемы коммутации. Если для рассматриваемого примера принять угловую скорость первого режима 30 град/с, постоянную времени 50·10-3 секунд и запаздывание при включении 20·10-3 секунд, то с помощью формулы (4) может быть найден порог отработки угла при разгоне. Принимаем для времени разгона (оно равно времени запаздывания) Δtp=20·10-3 с (40% от постоянной времени) значение ωм=12 град/с и находим ΔУМр=7,2 угловых минут. Данная величина ΔУМр соответствует этапу разгона без запаздывания. Если для этого случая при времени Δtp начать торможение с помощью тормозной муфты, то добавляется угол торможения ΔУМт. При максимальном времени торможения 0,04 с из формулы (5) получаем ΔУМт=14,4 угловых минут. Сложение этих двух углов как случайных величин по формуле

дает пороговое значение угла для первого режима - 16,1 угловых минут.
Данная величина является недопустимо большой при погрешности шкалы 10 угловых минут и суммарной погрешности 24 угловые минуты.
Во втором режиме при угловой скорости антенны 3 град/с ошибка порога уменьшается в 10 раз. В этом режиме существенно возрастает влияние статической погрешности, поскольку уменьшение подаваемого напряжения и, соответственно, тока увеличивает влияние момента трения, а также изменения сопротивления обмотки якоря из-за колебаний температуры. Режим масштабирования позволяет измерить и скомпенсировать постоянную составляющую статической погрешности. Заданный в программе угол сравнивается с реально отработанным углом. Найденная погрешность вводится как поправка в вычислительное устройство 18. Статическая погрешность, которая остается после масштабирования, определяется случайным разбросом момента трения, напряжения и других факторов. Суммарная величина этой погрешности для рассматриваемых ретрансляторов не превышает 3-10 процентов и близка к статической погрешности первого режима.
В рассматриваемых ретрансляторах при быстром программном развороте (первый режим) имеют место три этапа (разгон, установившийся режим и торможение), поэтому справедлива формула (1). При медленном программном развороте (второй режим) могут быть как три этапа, так и два этапа (разгона и торможения). В последнем случае справедлива формула (2).
С учетом формул (1), (3), (4) и (5) угол поворота (угол места) антенны находят из следующей формулы

Длительность сформированного в вычислительном устройстве 18 программного импульса Δtпр равна (Δtр+Δtур). Фактическое время поворота антенны с учетом инерционного движения при торможении составляет (Δtp+Δtyp+Δtт).
С учетом формулы (9) время программного импульса Δtпр для заданного программного угла ΔУМпр находят из формулы

При этом учитывается, что на этапах Δtp и Δtт средняя скорость поворота антенны равна 1/2ωм.
В линейной модели угловая скорость при разгоне находится из формулы

где - Кω постоянный коэффициент.
В формулах (9, 10) при линейной модели берется граничное значение времени этапа разгона Δtp=Δtpг, при котором угловая скорость достигает максимального значения.
Технические параметры ωм, Δtpг и Δt определяют и вводят в память вычислительного устройства 18 при изготовлении ретранслятора. В рассматриваемом примере Δt имеет номинальное значение 0,02 с и разброс ±0,02 с. Время Δtpг принимается равным 2τ=0,1 с (τ - постоянная времени контура управления).
Формула (2) справедлива для Δtпp≤Δtpг. В этом случае время программного импульса Δtпp равно Δtp, а угол поворота находят из формулы

Для заданного программного угла ΔУМпр формула (12) с учетом формулы (11) сводится к квадратному уравнению

Из этого уравнения находят длительность программного импульса

В рассматриваемом примере во втором режиме (ωм=3 град/с, Δtт=0,02 с) граничному импульсу Δtpг=0,1 с соответствует граничный угол ΔУМпрг=0,18 град. Для меньшего значения программного угла ΔУМпр из формулы (14) в вычислительном устройстве 18 находят Δtпp=Δtp.
Предложенный способ передачи информации реализуется следующим образом. После подачи на ретранслятор питания осуществляют режим 26 (фиг.2) - масштабирование программного разворота приемной антенны 1 при ее повороте по углу места.
При этом производят программный разворот приемной антенны 1 (фиг.1) из исходного (транспортного) положения на заданный угол места и фиксацию ее в этом положении с помощью тормозной муфты.
Управление приемной антенной 1 производят с помощью вычислительного устройства 18 и блока 9. В этом режиме приемную антенну 1 оставляют в исходном положении по азимуту, а передающую антенну 3 - по углу места и азимуту.
Управление производят путем подачи на обмотку ротора постоянного напряжения, соответствующего второму (точному) режиму, в течение заданного с помощью вычислительного устройства 18 интервала времени, который соответствует программному углу. Это значение угла вводят в вычислительное устройство 18 при изготовлении ретранслятора. После остановки приемной антенны 1 фактическое значение угла места измеряют с помощью угломестной шкалы 15 и вводят в вычислительное устройство 18 с помощью устройства 23 ввода данных. В вычислительном устройстве определяется поправка по напряжению - коэффициент масштабирования Км.
Например, при напряжении сигнала 2,5 В, что составляет 0,1 от напряжения сигнала, соответствующего быстрому режиму (25 В), отработанный угол меньше программного на 15%. В вычислительном устройстве 18 для данного двигателя величина сигнала корректируется на 15%, т.е. увеличивается с 2,5 В до 2,875 В. Таким образом осуществляют масштабирование для медленного режима. В данном примере Км=1,15.
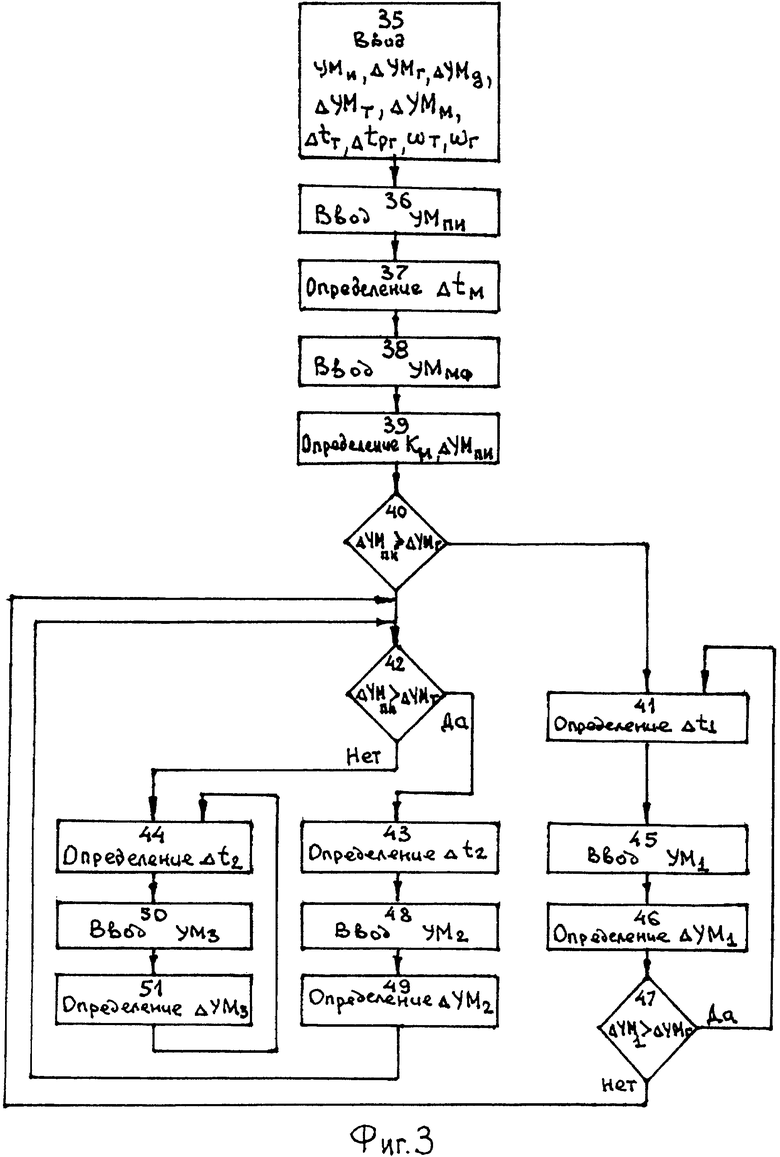
На изображенной на фиг.3 блок-схеме подпрограммы вычислительного устройства 18 (фиг.1) приведены операции, позволяющие реализовать программное наведение приемной антенны 1 по углу места на источник сигнала. Эта подпрограмма используется при проведении режимов 26 и 27 (фиг.2).
При изготовлении ретранслятора в вычислительное устройство 18 (фиг.1) вводят следующие параметры (операция 35, фиг.3):
УМи - исходный угол места приемной антенны 1;
ΔУМг - граничный угол разворота двух режимов (быстрого и медленного);
ΔУМд - допустимая погрешность отработки угла места;
ΔУМт - граничный угол разворота для двух диапазонов второго (медленного) режима (больших и малых углов);
ΔУМм - программный угол места при масштабировании;
Δtт - время торможения (среднее);
Δtpг - граничное время разгона;
ωт - максимальная скорость в точном (втором) режиме;
ωг - максимальная скорость в грубом (первом) режиме.
Величину программного угла места источника сигнала УМпи находят и вводят в данную подпрограмму (операция 36, фиг.3) после ввода в вычислительное устройство 18 (фиг.1) навигационных данных и до проведения режима 26 (фиг.2).
Запуск подпрограммы производят в режиме 26 с выполнения операции 37 (фиг.3) - определения в вычислительном устройстве 18 (фиг.1) импульса масштабирования Δtм. При этом для заданного угла ΔУМм в точном (первом) режиме из формулы (10) находится длительность импульса Δtм. В формуле (10) принимается: Δtпp=Δtм, Δtр=Δtpг, ΔУМпр=ΔУМм, ωм=ωт. Этот импульс подают на обмотку ротора для обработки угла масштабирования ΔУМм. Затем в этом же режиме 26 (фиг.2) осуществляют операцию 38 (фиг.3) - ввод в вычислительное устройство 18 (фиг.1) с помощью устройства 23 ввода данных фактического значения угла места ΔУМмф приемной антенны 1 после отработки угла масштабирования.
По разности программного и фактического значений угла места в вычислительном устройстве 18 определяется и вводится в память поправка - коэффициент масштабирования Км (операция 39, фиг.3). Кроме того, в данной операции вычисляется угол программного разворота приемной антенны 1 (фиг.1) на источник сигнала по углу места по формуле

После этого осуществляют режим 27 (фиг.2) - программный разворот приемной антенны 1 (фиг.1) по углу места на источник сигнала.
Ввод в вычислительное устройство 18 навигационных данных, характеризующих положение ретранслятора, источника сигнала и абонентской станции, расчет по этим данным программных углов места источника сигнала и абонентской станции производят до проведения режима 26 (фиг.2). Перед программным разворотом приемной антенны 1 (фиг.1) на источник сигала по углу места на устройстве 19 индикации отображают рассчитанный угол места источника сигнала, а на устройстве 21 индикации - рассчитанный угол места абонентской станции.
В вычислительном устройстве 18 производится определение режима разворота (операция 40, фиг.3): величина ΔУМпи сравнивается с граничным углом ΔУМг

Величину порога ΔУМг определяют исходя из условия минимизации времени разворота приемной антенны 1 (фиг.1). Для рассматриваемого примера ретранслятора величина ΔУМг должна составлять единицы градусов. В предлагаемом способе угол ΔУМг соответствует длительности граничного импульса Δtрг при первом (быстром) режиме. В рассматриваемом примере при ωм=30 град/с, Δtpг=0,1 с и Δtт=0,02 с (Δtyp=0) из формулы (12) определяется граничное значение угла
УМг=1,8 градуса.
На практике существенную часть времени программного наведения занимают операции коррекции, которые включают: ввод в вычислительное устройство 18 значения угла, снятого со шкалы, определение и отработку разности его и программного угла. Поэтому количество коррекций должно быть минимальным.
Если условие (16) выполняется, то по команде вычислительного устройства 18 осуществляют быстрый разворот приемной антенны 1 и ее торможение с помощью тормозной муфты. Время этого быстрого разворота Δt1 на угол ΔУМпр в вычислительном устройстве 18 находится из формулы (10) (операция 41, фиг.3). При этом угловая скорость соответствует грубому (первому) режиму ωм=ωг. При ΔУМпи≤ΔУМг используют медленный (второй) режим. В этом случае проводится операция 42 (фиг.3): определение диапазона отрабатываемого угла

Если условие (17) выполняется, то справедлива формула (1), т.е. программный разворот включает три этапа. Если условие (17) не выполняется, то должна использоваться формула (2) для разворота из двух этапов.
В первом случае в вычислительном устройстве 18 (фиг.1) для нахождения длительности сигнала Δt2 используется формула (10) (операция 43, фиг.3). При этом угловая скорость ωм соответствует точному (второму) режиму ωм=ωт. Во втором случае используется формула (14) (операция 44).
При выполнении условия (16) после быстрого разворота приемной антенны 1 (фиг.1) в течение заданного импульса Δt1 производят сравнение фактического значения угла УM1, снятого со шкалы 15, с программным углом места источника сигнала УМпи, отображенным на устройстве 19 индикации. Если они отличаются на величину, которая меньше допуска ΔУМд то на этом режим 27 (фиг.2) завершается, т.е. коррекции не проводят. Вероятность такого случая очень мала. Если разность УМпи и УM1 превышает допуск, то проводят следующую операцию - ввод в вычислительное устройство 18 (фиг.1) угла УM1 с помощью устройства 23 ввода данных (операция 45, фиг.3).
Затем в вычислительном устройстве 18 (фиг.1) производят операцию 46 (фиг.3) - определение угла коррекции

После этого проводят операцию 47 - определение режима отработки угла коррекции ΔУM1 путем сравнения

Если условие (19) выполняется, то производят повторную отработку (маловероятный случай) угла в быстром (первом) режиме (операции 41, 45, 46). Если условие (19) не выполняется, то проводят отработку угла коррекции в точном (втором) режиме, начиная с операции 42, при этом принимают ΔУМ2=ΔУМпи.
При работе в таком режиме после окончания операции 43 по команде вычислительного устройства 18 (фиг.1) осуществляют разворот приемной антенны 1 в точном режиме и последующее ее торможение с помощью тормозной муфты.
Затем сравнивают фактическое значение угла места УМ2, снятое со шкалы 15, с заданным углом УМпи, отображенным на устройстве 19 индикации.
Если условие

не выполняется, то режим 27 (фиг.2) завершается.
Если условия (20) выполняется, то проводят следующую операцию - ввод в вычислительное устройство 18 (фиг.1) угла УM2 с помощью устройства 23 ввода данных (операция 48, фиг.3).
Затем в вычислительном устройстве 18 (фиг.1) проводят операцию 49 (фиг.3) - определение угла коррекции

После этого проводят повторную операцию 42 - определение диапазона отрабатываемого угла. Если условие (17) выполняется, то повторяют операцию 43.
Если условие (17) не выполняется, то в вычислительном устройстве 18 (фиг.1) осуществляют операцию 44 (фиг.3).
Затем по команде вычислительного устройства 18 (фиг.1) проводят программный разворот приемной антенны 1 и ее торможение с помощью тормозной муфты.
После этого сравнивают фактическое значение угла места УМ3, снятое со шкалы 15, с программным углом источника сигнала УМпи. Если разность УМпи и УМ3 не превышает допуск ΔУМд, то режим 27 (фиг.2) завершается. Если разность УМпи и УМ3 превышает допуск, то последовательно проводят следующие операции: ввод в вычислительное устройство 18 (фиг.1) угла УМ3 с помощью устройства 23 ввода данных (операция 50, фиг.3) и определение угла коррекции (операция 51)

После этого в вычислительном устройстве 18 (фиг.1) проводят повторно операцию 44 (фиг.3) - определение длительности сигнала Δt2 с помощью формулы (14).
Режим 27 (фиг.2) завершается, когда разность УМпи и фактического угла места приемной антенны 1 (фиг.1) не превышает ΔУМд.
Реально для рассматриваемых ретрансляторов по каждому углу проводятся одна-две коррекции. В приведенном примере принимаем УМпи=40 градусов, погрешность в установившемся режиме Δур - 3 процента, т.е. 1,2 градуса.
Из формулы (9) при ωм=30 град/с, Δtp=0,1 с, Δtт=0,02 с находим угол разгона ΔУМр=1,5 град и угол торможения ΔУМт=0,3 град.
Принимаем ошибку угла разгона Δр=0,45 град (30 процентов) и ошибку угла торможения Δт=0,3 град.
Суммарную угловую ошибку ΔΣ определяем как сумму случайных величин

и находим ΔΣ=1,33 град.
Поскольку погрешность ΔΣ меньше, чем граничное значение угла для быстрого (первого) режима (1,8 град.), то при коррекции используем точный (второй) режим (ωм=3 град/с, Δtр=0,1 с, Δtр=0,02 с).
Находим ΔУМр=0,15 град, ΔУМт=0,03 град, при этом угол установившегося режима ΔУМур=1,15 град. Погрешность установившегося режима принимается 5 процентов, т.е. 0,063 град. Погрешность Δр и Δт соответственно равны 0,045 град и 0,03 град. С помощью формулы (23) находим суммарную ошибку ΔΣ=0,083 град, что находится в пределах допуска. Таким образом, в данном случае использовалась одна коррекция.
Для рассматриваемого примера ретранслятора суммарная ошибка наведения приемной антенны 1 (фиг.1) на источник сигнала по углу места включает упомянутые выше случайные ошибки: ошибка негоризонтальности - не более 5 угловых минут; ошибка местонахождения источника сигнала для современных КА - не более 6 угловых минут, ошибка отработки программного угла - не более 5 угловых минут, ошибка шкалы - не более 10 угловых минут.
Таким образом, суммарная ошибка, определяемая сложением случайных величин, составляет 13,6 угловых минут.
После окончания режима 27 (фиг.2) проводят режим 28 - масштабирование программного разворота приемной антенны 1 (фиг.1) по азимуту. Режим выполняется аналогично режиму 26 (фиг.2). При повороте приемной антенны 1 (фиг.1) на заданный угол по азимуту угол места, равный углу места источника сигнала, поддерживается постоянным с помощью тормозной муфты.
Для программного разворота по азимуту приемной антенны 1 (фиг.1) по сигналам вычислительного устройства 18 используют привод, размещенный в блоке 7 азимутальной оси приемной антенны. Разворот производят вокруг азимутальной оси 6.
После окончания режима 28 (фиг.2) осуществляют режим 29 - программный разворот приемной антенны 1 (фиг.1) по азимуту для захвата сигнала. При этом угол места приемной антенны 1 постоянный и равен углу места источника сигнала. Разворот по азимуту осуществляют в быстром (первом) режиме.
Относительно высокая точность наведения приемной антенны 1 по углу места по сравнению с шириной диаграммы направленности позволяет реализовать однострочный по углу места поиск сигнала. Азимутальный разворот проводится только при одном расчетном значении угла места источника сигнала.
В общем случае угол разворота приемной антенны 1 до захвата сигнала может достигать 360 градусов. Введение этого разворота позволяет отказаться от привязки азимутальной измерительной системы ретранслятора к меридиану и от дополнительной аппаратуры (магнитный компас, гирокомпас, радиокомпас), которая используется для начального определения меридиана.
В предложенном изобретении в качестве физически реализуемого азимутального базового направления предлагается использование направления оптической оси приемной антенны 1 на источник сигнала (наземный или КА). При этом направление меридиана, которое используется в программе наведения передающей антенны 3, находят расчетным путем. Угол ψис между меридианом и направлением на источник сигнала и угол ψАС между меридианом и направлением на абонентскую станцию находят по известным координатам (широте и долготе) источника сигнала (для КА - по координатам подспутниковой точки), абонентской станции и ретранслятора.
При наведении приемной антенны 1 на источник сигнала определяют угол АЗис. Требуемый для программного азимутального наведения передающей антенны 3 на абонентскую станцию угол АЗАС (азимут абонентской станции) находят из выражения

Принимаемый радиотелевизионный сигнал 24 (фиг.1) от источника сигнала обнаруживают с помощью приемной антенны 1. В СВЧ-блоке 2 осуществляют преобразование СВЧ-сигнала: фильтрацию, усиление, изменение частоты. После преобразования сигнал подают на блок 5 наведения приемной антенны. С помощью этого сигнала реализуют контур наведения приемной антенны 1 по принимаемому сигналу.
С помощью блока 5 и вычислительного устройства 18 измеряют и вводят в память величину сигнала, фиксируют его максимальное значение. При уменьшении сигнала на 2-5 процентов в вычислительном устройстве 18 формируется команда на остановку приемной антенны 1 с помощью тормозной муфты через заданное время.
Это время выбирают таким, чтобы сигнал по напряжению уменьшился в 4-5 раз по сравнению с максимальным значением. Это соответствует повороту приемной антенны 1 по азимуту от положения максимального значения сигнала на угол, равный ширине диаграммы направленности по уровню 3 дб.
В рассматриваемом примере этот угол равен 2 градусам.
Затем проводят режим 30 (фиг.2) - точное наведение приемной антенны 1 (фиг.1) на источник сигнала по азимуту.
По команде вычислительного устройства 18 проводят поворот приемной антенны 1 в обратную сторону (в сторону максимального сигнала) в медленном (втором) режиме с измерением величины сигнала. При увеличении сигнала до граничного значения, составляющего от 30 до 70 процентов от максимального значения, в вычислительном устройстве 18 формируется команда на остановку приемной антенны 1 и фиксацию ее положения с помощью тормозной муфты.
Граничное значение сигнала выбирается на крутом участке диаграммы направленности для повышения точности операции.
После остановки приемной антенны 1 с азимутальной шкалы 14 снимают значение азимута и вводят в вычислительное устройство 18 с помощью устройства 23 ввода данных.
После этого по команде вычислительного устройства 18 проводят поворот приемной антенны 1 в медленном режиме в том же направлении на рассчитанный угол с прохождением максимального значения и второго граничного значения, равного первому. Остановку и фиксацию положения приемной антенны 1 проводят с помощью тормозной муфты. Это положение соответствует повороту приемной антенны 1 по азимуту от положения максимального значения сигнала на угол, равный ширине диаграммы направленности.
После остановки приемной антенны 1 по команде вычислительного устройства 18 проводят ее поворот в обратном направлении. Поворот производят в медленном режиме с остановкой и фиксацией положения приемной антенны 1 при увеличении сигнала до второго упомянутого граничного значения. После этого в вычислительное устройство 18 вводят значение азимута, снятого с азимутальной шкалы 14.
По найденным двум значениям азимута в вычислительном устройстве 18 определяют азимут источника сигнала как полусумму двух указанных углов. Найденный азимут источника сигнала используют для программного наведения передающей антенны 3 на абонентскую станцию по азимуту. Азимут источника сигнала отображают на устройстве 20 индикации, а рассчитанный азимут абонентской станции - на устройстве 22 индикации.
В соответствии с отображенным на устройстве 20 индикации азимутом источника сигнала и показанием азимутальной шкалы 14 приемной антенны 1 проводят одну или две коррекции положения приемной антенны 1 в медленном (втором) режиме, с доведением азимута приемной антенны 1 до найденного значения. При этом используют операции, приведенные на фиг.3 (медленный режим).
После завершения коррекции положение приемной антенны 1 фиксируют с помощью тормозной муфты.
Для рассматриваемого примера ретранслятора суммарная погрешность наведения приемной антенны 1 на источник сигнала по азимуту включает следующие случайные погрешности: положения КА - 6 угловых минут, шкалы - 10 угловых минут, отработки программного угла - 5 угловых минут, а также погрешность азимута источника сигнала. Последняя погрешность включает ошибку шкалы (10 угловых минут) и ошибку при торможении приемной антенны 1. Поскольку торможение осуществляется при движении в разные стороны, то погрешность торможения компенсируется. Поэтому погрешность положения максимального значения сигнала определяется для полусуммы случайных ошибок (шкал) и составляет 7 угловых минут.
Суммарная погрешность наведения приемной антенны 1 по азимуту на источник сигнала составляет 14,5 угловых минут.
Затем проводят режим 31 (фиг.2) - масштабирование программного разворота передающей антенны 3 (фиг.1) по углу места. Режим осуществляют аналогично режиму масштабирования программного разворота приемной антенны 1 по углу места.
После этого осуществляют режим 32 (фиг.2) - программное наведение передающей антенны 3 (фиг.1) на абонентскую станцию по углу места. Данный режим выполняют подобно режиму 27 (фиг.2) с использованием аналогичной подпрограммы. При этом, в соответствии с отображенным на устройстве 21 (фиг.1) индикации рассчитанным значением угла места абонентской станции и показанием угломестной шкалы 17, проводят одну или две коррекции положения передающей антенны 3 с доведением угла места до рассчитанного значения и фиксацией этого положения передающей антенны 3 с помощью тормозной муфты.
Точность программного наведения передающей антенны 3 на абонентскую станцию по углу места аналогична точности наведения приемной антенны 1 по углу места на источник сигнала.
После этого проводят режим 33 (фиг.2) - масштабирование программного разворота передающей антенны 3 (фиг.1) по азимуту. Режим производят аналогично режиму масштабирования программного разворота передающей антенны 3 по углу места.
Затем осуществляют режим 34 (фиг.2) - программное наведение передающей антенны 3 (фиг.1) на абонентскую станцию по азимуту. Данный режим выполняют подобно режиму 32 (фиг.2) с использованием аналогичной подпрограммы.
При этом в соответствии с отображенным на устройстве индикации 22 (фиг.1) рассчитанным значением азимута абонентской станции, а также показанием азимутальной шкалы 16 передающей антенны 3, проводят одну или две коррекции положения передающей антенны 3, с доведением азимута до рассчитанного значения угла. После чего положение передающей антенны 3 фиксируют с помощью тормозной муфты.
Для рассматриваемого примера ретранслятора суммарная ошибка наведения передающей антенны 3 на абонентскую станцию по азимуту включает следующие случайные ошибки: положения КА - 6 угловых минут, азимута источника сигнала - 7 угловых минут, местонахождения ретранслятора и абонентской станции - 6 угловых минут, отработки программного угла - 5 угловых минут, шкалы - 10 угловых минут. Суммарная ошибка составляет 15,7 угловых минут.
После выполнения режима 34 (фиг.2) для снижения энергопотребления при эксплуатации снимают питание с аппаратуры управления по углу места и азимуту приемной антенны 1 (фиг.1) и передающей антенны 3. После этого осуществляют передачу радиотелевизионного сигнала на абонентскую станцию.
Приведенное описание предлагаемого способа позволяет сделать следующее заключение.
По оценке, за счет упрощения аппаратуры (исключение датчиков углов и устройств отработки сигналов приемной и передающей антенн, а также устройства определения меридиана, например радиокомпаса, упрощение источников электропитания) стоимость одного комплекта ретранслятора уменьшается на 5000-10000 у.е. Масса ретранслятора уменьшается на 8-15 кг. Если питание ретранслятора осуществляется от автономного источника, то благодаря снижению энергопотребления существенно снижаются масса, габариты и стоимость этого источника.
За счет упрощения аппаратуры ретранслятора, а также фиксации положения приемной и передающей антенн после их наведения, по оценке, потребляемая при эксплуатации ретранслятора мощность уменьшается на 20-30 процентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДАЧИ РАДИОТЕЛЕВИЗИОННОГО СИГНАЛА | 2006 |
|
RU2308154C1 |
| СПОСОБ НАВЕДЕНИЯ ПЕРЕДАЮЩЕЙ АНТЕННЫ РЕТРАНСЛЯТОРА | 2007 |
|
RU2328824C1 |
| СПОСОБ ПЕРЕДАЧИ РАДИОТЕЛЕВИЗИОННОГО СИГНАЛА | 2011 |
|
RU2479923C2 |
| СПОСОБ НАВЕДЕНИЯ АНТЕНН РЕТРАНСЛЯТОРА | 2006 |
|
RU2368076C2 |
| СПОСОБ ПЕРЕДАЧИ СИГНАЛА СВЧ | 2008 |
|
RU2374764C1 |
| СПОСОБ НАВЕДЕНИЯ ПЕРЕДАЮЩЕЙ АНТЕННЫ РЕТРАНСЛЯТОРА НА АБОНЕНТСКУЮ СТАНЦИЮ | 2005 |
|
RU2308157C1 |
| УСТРОЙСТВО СВЧ-СВЯЗИ | 2005 |
|
RU2309542C2 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2009 |
|
RU2409893C2 |
| Станция (система) приёма и обработки информации от среднеорбитального сегмента космической системы поиска и спасания и способ управления наведением антенн этой станции | 2015 |
|
RU2622390C2 |
| МОБИЛЬНАЯ СТАНЦИЯ НАЗЕМНОЙ ПОДВИЖНОЙ СЛУЖБЫ | 2008 |
|
RU2371850C1 |
Изобретение относится к системам связи и предназначено для ретрансляции радиотелевизионных сигналов. Достигаемый технический результат заключается в упрощении аппаратуры ретранслятора, в уменьшении его массы и габаритов, в снижении его энергопотребления. Сущность изобретения состоит в том, что способ передачи информации включает наведение приемной антенны ретранслятора на источник сигнала путем разворота приемной антенны по углу места и азимуту с ее последующим точным наведением на источник сигнала, а также наведение передающей антенны ретранслятора на абонентскую станцию в соответствии с рассчитанными азимутом и углом места. Перед разворотом приемной антенны по углу места на источник сигнала осуществляют режим масштабирования, при котором проводят разворот приемной антенны по углу места на рассчитанный угол и фиксацию ее положения, причем разворот производят в режиме второй скорости, которая в 4-10 раз меньше скорости первого режима. В вычислительном устройстве осуществляют сравнение рассчитанного угла с фактическим значением угла, измеренным с помощью угломестной шкалы приемной антенны, определяют поправку на угловую скорость. На устройствах индикации отображают рассчитанные углы места источника сигнала и абонентской станции. Производят разворот приемной антенны на источник сигнала по углу места в режиме первой скорости, если величина программного угла больше рассчитанного граничного значения. Проводят одну или две коррекции положения приемной антенны с доведением угла места до рассчитанного значения и фиксацией этого положения приемной антенны. Осуществляют режим масштабирования разворота приемной антенны по азимуту аналогично режиму масштабирования по углу места. Проводят разворот приемной антенны по азимуту в режиме первой скорости, производят измерение максимального значения сигнала, излучаемого источником сигнала. Через заданный угол после прохождения максимального значения сигнала останавливают приемную антенну и осуществляют поворот приемной антенны в режиме второй скорости в обратную сторону с остановкой при увеличении сигнала до граничного значения, составляющего от 30 до 70 процентов от максимального значения. Вводят в вычислительное устройство значение азимута, измеренное с помощью азимутальной шкалы приемной антенны. Проводят поворот приемной антенны в режиме второй скорости в том же направлении с остановкой через заданный угол с прохождением максимального значения сигнала и второго граничного значения, равного первому. В режиме второй скорости проводят поворот приемной антенны в обратном направлении с остановкой при увеличении сигнала до второго граничного значения. Вводят в вычислительное устройство значение измеренного азимута, по найденным двум значениям азимута определяют азимут источника сигнала. Проводят одну или две коррекции положения приемной антенны с доведением азимута до найденного значения. Осуществляют режим масштабирования разворота передающей антенны по углу места, разворот передающей антенны на абонентскую станцию по углу места, одну или две коррекции положения передающей антенны с доведением угла места до рассчитанного значения и фиксацией этого положения. Проводят режим масштабирования разворота передающей антенны по азимуту, разворот передающей антенны на абонентскую станцию по азимуту, одну или две коррекции положения передающей антенны с доведением азимута до рассчитанного значения и фиксацией этого положения. 3 ил.
Способ передачи информации, включающий программное наведение приемной антенны ретранслятора на источник сигнала путем разворота приемной антенны по углу места и азимуту на программный угол, с ее последующим точным наведением на источник сигнала, а также программное наведение передающей антенны ретранслятора на абонентскую станцию в соответствии с рассчитанными азимутом и углом места, отличающийся тем, что перед программным разворотом приемной антенны по углу места на источник сигнала осуществляют режим масштабирования, при котором проводят разворот приемной антенны по углу места на рассчитанный угол и фиксацию ее положения, причем разворот производят в режиме второй скорости, которая в 4-10 раз меньше скорости первого режима, после этого в вычислительном устройстве осуществляют сравнение рассчитанного угла с фактическим значением угла, измеренным с помощью угломестной шкалы приемной антенны и введенным в вычислительное устройство, в результате чего определяют поправку на угловую скорость, которую учитывают при программном развороте приемной антенны по углу места в режиме второй скорости, после этого на устройствах индикации отображают рассчитанные углы места источника сигнала и абонентской станции, затем производят программный разворот приемной антенны на источник сигнала по углу места и фиксацию ее положения, разворот проводят в режиме первой скорости, если величина программного угла места больше рассчитанного граничного значения, или в режиме второй скорости, при этом в соответствии с отображенным на устройстве индикации рассчитанным значением угла места источника сигнала и показанием угломестной шкалы приемной антенны, проводят одну или две коррекции положения приемной антенны, с доведением угла места до рассчитанного значения и фиксацией этого положения приемной антенны, затем осуществляют режим масштабирования программного разворота приемной антенны по азимуту аналогично режиму масштабирования по углу места, после этого проводят разворот приемной антенны по азимуту в режиме первой скорости, производят измерение максимального значения сигнала, излучаемого источником сигнала, после чего через заданный угол после прохождения максимального значения сигнала останавливают приемную антенну и фиксируют ее положение, затем осуществляют поворот приемной антенны в режиме второй скорости в обратную сторону с остановкой и фиксацией ее положения при увеличении сигнала до граничного значения, составляющего от 30 до 70% от максимального значения, вводят в вычислительное устройство значение азимута, измеренного с помощью азимутальной шкалы приемной антенны, после этого проводят поворот приемной антенны в режиме второй скорости в том же направлении с остановкой и фиксацией ее положения через заданный угол с прохождением максимального значения сигнала и второго граничного значения, равного первому, после остановки проводят поворот приемной антенны в обратном направлении в режиме второй скорости с остановкой и фиксацией положения при увеличении сигнала до второго упомянутого граничного значения, вводят в вычислительное устройство значение азимута, измеренного с помощью азимутальной шкалы приемной антенны, по найденным двум значениям азимута в вычислительном устройстве определяют азимут источника сигнала, который используют для программного наведения передающей антенны по азимуту на абонентскую станцию, после чего отображают на устройствах индикации найденный азимут источника сигнала и рассчитанный азимут абонентской станции, затем, в соответствии с отображенным на устройстве индикации азимутом источника сигнала и показанием азимутальной шкалы приемной антенны, проводят одну или две коррекции положения приемной антенны, с доведением азимута до найденного значения и фиксацией этого положения приемной антенны, после этого проводят режим масштабирования программного разворота передающей антенны по углу места аналогично режиму масштабирования программного разворота приемной антенны по углу места, затем осуществляют программный разворот передающей антенны по углу места на абонентскую станцию и фиксацию ее положения аналогично программному развороту приемной антенны по углу места, при этом в соответствии с отображенным на устройстве индикации рассчитанным значением угла места абонентской станции и показанием угломестной шкалы передающей антенны, проводят одну или две коррекции положения передающей антенны, с доведением угла места до рассчитанного значения и фиксацией этого положения передающей антенны, после этого осуществляют режим масштабирования программного разворота передающей антенны по азимуту аналогично режиму масштабирования программного разворота передающей антенны по углу места, затем проводят программный разворот передающей антенны по азимуту на абонентскую станцию и фиксацию ее положения аналогично программному развороту передающей антенны по углу места, при этом в соответствии с отображенным на устройстве индикации рассчитанным значением азимута абонентской станции и показанием азимутальной шкалы передающей антенны, проводят одну или две коррекции положения передающей антенны, с доведением азимута до рассчитанного значения и фиксацией этого положения передающей антенны, затем осуществляют передачу радиотелевизионного сигнала.
| ФРОЛОВ О.П | |||
| Антенны для земных станций спутниковой связи | |||
| - М.: Радио и связь, 2000, с.260-265 | |||
| СПОСОБ НАВЕДЕНИЯ ПЕРЕДАЮЩЕЙ АНТЕННЫ РЕТРАНСЛЯТОРА НА АБОНЕНТСКУЮ СТАНЦИЮ | 2005 |
|
RU2308157C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА ДЛЯ ПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2228860C1 |
| RU 2070738 C1, 20.12.1996 | |||
| US 5570097 A, 29.10.1996 | |||
| WO 9626607 A1, 29.08.1996 | |||
| US 6061095 A, 09.05.2000 | |||
| US 5590394 A, 31.12.1996. | |||

