Изобретение относится к системам связи и может быть использовано для расширения зоны обслуживания в районах, где отсутствует или наблюдается неустойчивый прием радиотелевизионного сигнала сверхвысокой частоты (СВЧ).
Прямому прохождению сигнала от источника сигнала до точки приема препятствует рельеф местности: наличие холма или горной преграды или точка приема расположена в ложбине. В таких случаях используют специальные линии СВЧ-связи и ретрансляторы. Источником радиотелевизионного сигнала СВЧ может быть наземный источник или космический аппарат (КА).
Известны способы передачи сигнала СВЧ, реализованные в станциях спутниковой связи. Указанные станции обычно представляют собой приемо-передающие радиостанции с одной общей антенной (на прием и на передачу). Для наведения антенны в этих станциях используют способы, в которых проводят режим программного наведения в заданную точку пространства, а также режим точного наведения по принимаемому сигналу (режим автосопровождения). Переход в режим автосопровождения осуществляют с помощью поиска и захвата сигнала (Покрас A.M., Сомов A.M., Цуриков Г.Г. Антенны земных станций спутниковой связи. - М.: Радио и связь, 1985, с.35-76).
В режиме точного наведения по принимаемому сигналу могут использоваться различные методы: метод экстремального наведения, моноимпульсный метод и др.
Недостатком данных способов является трудность реализации точного программного наведения антенны, что связано с необходимостью использования достаточно сложных точных измерительных средств.
Известен способ передачи сигнала СВЧ, использованный в станции спутниковой связи, содержащей параболическую зеркальную антенну с СВЧ-блоком и блоками азимутальной и угломестной осей, блок наведения антенны, вычислительное устройство, снабженное программами, включая программы наведения антенны (Фролов О.П. Антенны для земных станций спутниковой связи. - М.: Радио и связь, 2000, с.260-265).
В данном способе проводят режим программного наведения антенны по углу места и азимуту в заданную точку пространства, а также режим точного наведения антенны на источник сигнала с использованием автосопровождения, реализованного посредством метода экстремального наведения. Режим точного наведения антенны осуществляют путем перехода из режима программного наведения с использованием поиска и захвата сигнала.
Недостатком данного способа является значительная погрешность программного наведения. Это обусловлено, прежде всего, ошибкой определения меридиана.
Прототипом изобретения является способ передачи сигнала СВЧ, реализованный в ретрансляторе, содержащем приемную и передающую параболические зеркальные антенны, а также СВЧ-блоки, блоки азимутальной и угломестной осей приемной и передающей антенн. В состав ретранслятора также входят блок наведения приемной антенны и вычислительное устройство, снабженное программами, включая программы наведения антенны. Передачу сигнала СВЧ осуществляют на абонентскую станцию, содержащую параболическую зеркальную антенну с СВЧ-блоком и блоками азимутальной и угломестной осей, блок наведения антенны, вычислительное устройство, снабженное программами, включая программы наведения антенны - патент РФ №2308154, Н04В 5/00, 2007.
В данном способе осуществляют наведение приемной антенны ретранслятора на источник сигнала с использованием программного наведения и точного наведения по принимаемому сигналу, а также программное наведение передающей антенны ретранслятора на абонентскую станцию в соответствии с рассчитанными углом места и азимутом, и проводимое после наведения передающей антенны наведение антенны абонентской станции на ретранслятор, осуществляемое последовательно путем предварительного программного наведения, точного наведения по принимаемому от ретранслятора сигнала и стабилизации положения антенны.
Недостатком данного способа является относительно невысокая точность программного наведения передающей антенны на абонентскую станцию, в первую очередь, по азимуту из-за неточного нахождения меридиана.
Для остронаправленных антенн (ширина диаграммы направленности менее 120 угловых минут) задача точного программного наведения передающей антенны на абонентскую станцию является одной из наиболее сложных. В данных устройствах из-за отсутствия приемного канала не может быть использована обратная связь по сигналу для повышения точности наведения антенны, как это делается в приемо-передающих станциях.
Отклонение основания ретранслятора от горизонтальной плоскости (ошибка негоризонтальности) может быть определена с помощью устройства местной вертикали, например маятникового типа, а также жидкостного уровня.
Для определения меридиана может быть использован радиокомпас, работающий от спутниковой радионавигационной системы.
Радиокомпас с приемлемыми размерами (измерительной базой 3-6 метров) имеет точность (по уровню 3σ) 15-30 угловых минут. Этого недостаточно для анализируемых ретрансляторов. Кроме того, при программном наведении передающей антенны ретранслятора на абонентскую станцию имеют место навигационные ошибки по азимуту и углу места. Эти ошибки вызваны погрешностями определения координат (широты, долготы), а также высоты ретранслятора и абонентской станции. Влияние данных ошибок возрастает при уменьшении расстояния между ретранслятором и абонентской станцией.
Технической задачей изобретения является повышение точности наведения передающей антенны ретранслятора на абонентскую станцию, упрощение ретранслятора и уменьшение его массы, а также упрощение эксплуатации ретранслятора.
Для достижения указанного технического результата в способе передачи сигнала СВЧ, включающем наведение приемной антенны ретранслятора на источник сигнала с использованием программного наведения и точного наведения по принимаемому сигналу, программное наведение передающей антенны ретранслятора на абонентскую станцию в соответствии с рассчитанными углом места и азимутом, а также проводимое после наведения передающей антенны наведение антенны абонентской станции на ретранслятор, осуществляемое последовательно путем предварительного программного наведения, точного наведения по принимаемому от ретранслятора сигнала и стабилизации положения антенны, после точного наведения антенны абонентской станции на ретранслятор проводят поочередное пошаговое сканирование передающей антенны ретранслятора сначала по углу места, а потом по азимуту, причем перед началом сканирования передающую антенну переводят из начального положения в исходное положение путем подачи импульсов сканирования, при этом соответствующий угол передающей антенны уменьшается на (1,25-1,5) ширины диаграммы направленности передающей антенны ретранслятора, перемещение из начального положения начинают с передачи синхронизирующего импульса от передающей антенны ретранслятора на антенну абонентской станции, при этом длительность синхронизирующего импульса составляет (0,03-0,1) длительности импульса сканирования, после приема синхронизирующего импульса в вычислительном устройстве абонентской станции осуществляют формирование импульсов и их счет с помощью первого счетчика, причем длительность этих импульсов равна длительности импульсов сканирования, формируемых в вычислительном устройстве ретранслятора, затем при движении передающей антенны ретранслятора из исходного положения в абонентской станции проводят дискретное измерение принимаемого от передающей антенны ретранслятора сигнала, при возрастании сигнала, превышающем величину порога, составляющего (0,4-0,6) максимального значения сигнала, в вычислительном устройстве абонентской станции формируют команду, по которой начинается счет импульсов во втором счетчике, а затем при снижении сигнала до значения порога осуществляют остановку обоих счетчиков, при этом команды на включение второго счетчика и остановку обоих счетчиков в вычислительном устройстве абонентской станции формируют при совпадении результатов двух измерений сигнала из трех, проводимых в течение одного импульса сканирования, после этого в вычислительном устройстве абонентской станции определяют номер шага, соответствующего направлению оптической оси передающей антенны ретранслятора на абонентскую станцию, и отображают его, соответственно, на устройстве индикации угла места и азимута абонентской станции, затем найденные номера шагов вводят в вычислительное устройство ретранслятора, в котором определяют углы коррекции по углу места и азимуту, после чего производят разворот передающей антенны на абонентскую станцию с фиксацией ее положения сначала по скорректированному углу места, а потом по скорректированному азимуту, после этого осуществляют передачу сигнала СВЧ.
Способ реализуется благодаря проведению дополнительных режимов, связанных с наведением передающей антенны ретранслятора на абонентскую станцию.
В качестве примера рассматриваем ретранслятор, в котором приемная и передающая антенны представляют собой остронаправленную параболическую зеркальную антенну с шириной диаграммы направленности - ⌀ДН, равной 60 угловых минут.
Для частот от 4,5 до 7,5 ГГц диаметр такой антенны составляет от 4,7 до 2,8 метра.
Высокой считается точность наведения антенны с потерями по мощности 0,5 дБ, что соответствует погрешности наведения ±0,2⌀ДН. Для рассматриваемого примера это соответствует ошибке наведения ±12 угловых минут.
Способ иллюстрируется фиг.1-4, на которых приведены: на фиг.1 - функциональная схема ретранслятора, на фиг.2 - функциональная схема абонентской станции, на фиг.3 - блок-схема режимов наведения приемной и передающей антенн ретранслятора и антенны абонентской станции, на фиг.4 - блок-схема подпрограммы коррекции программных угла места и азимута абонентской станции.
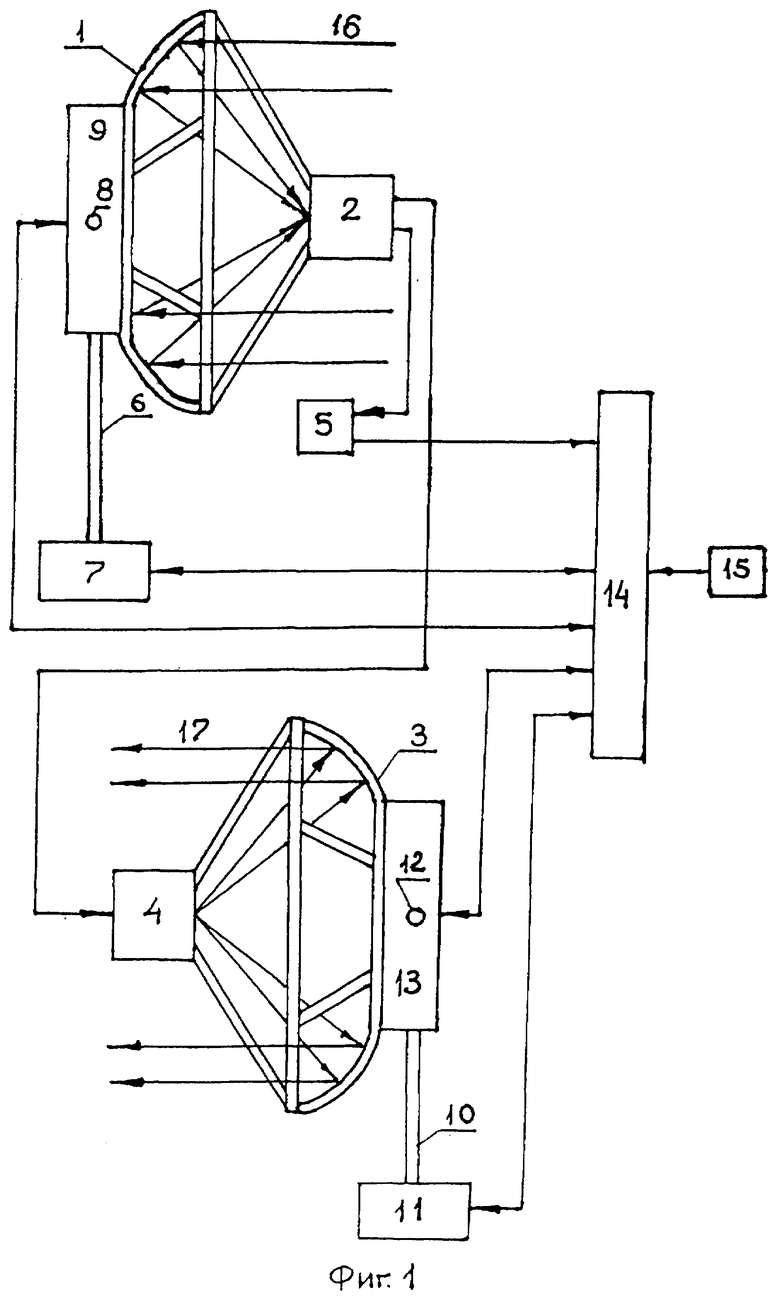
Ретранслятор, изображенный на фиг.1, содержит приемную антенну 1, на которой установлен СВЧ-блок 2 приемной антенны, соединенный с размещенным на передающей антенне 3 СВЧ-блоком 4 передающей антенны. СВЧ-блок 2 и СВЧ-блок 4 предназначены для усиления, фильтрации и преобразования частоты ретранслируемого СВЧ-сигнала. Второй выход СВЧ-блока 2 приемной антенны соединен с блоком 5 наведения приемной антенны, предназначенным для преобразования СВЧ-сигнала в сигнал, используемый для точного наведения приемной антенны 1. Для управления по азимутальной оси 6 приемной антенны ретранслятор содержит блок 7 азимутальной оси приемной антенны, а для управления по угломестной оси 8 приемной антенны - блок 9 угломестной оси приемной антенны.
Для управления по азимутальной оси 10 передающей антенны ретранслятор содержит блок 11 азимутальной оси передающей антенны, а для управления по угломестной оси 12 передающей антенны - блок 13 угломестной оси передающей антенны.
В состав блоков 7 и 9 приемной антенны и блоков 11 и 13 передающей антенны входят датчики углов с устройствами обработки сигналов, а также приводы, обеспечивающие повороты вокруг осей.
Ретранслятор содержит также вычислительное устройство 14, предназначенное для управления приемной антенной 1 и передающей антенной 3 и соединенное с блоком 5, а также с блоками 7, 9, 11 и 13. В состав ретранслятора входит также устройство 15 ввода данных.
Приемная антенна 1 ретранслятора предназначена для усиления принимаемого радиотелевизионного сигнала 16, приходящего от источника сигнала, а передающая антенна 3 - для усиления излучаемого радиотелевизионного сигнала 17, поступающего от ретранслятора на абонентскую станцию.
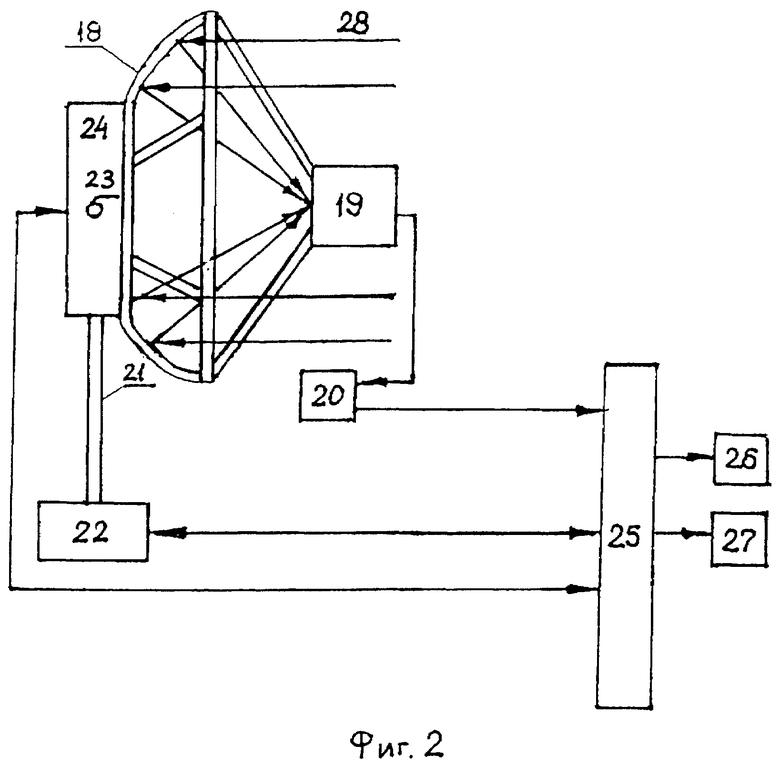
Абонентская станция, изображенная на фиг.2, содержит антенну 18, на которой установлен СВЧ-блок 19, соединенный с блоком 20 наведения антенны, предназначенным для преобразования СВЧ-сигнала в сигнал, используемый для точного наведения антенны 18. Для управления по азимутальной оси 21 антенны абонентская станция содержит блок 22 азимутальной оси антенны, а для управления по угломестной оси 23 антенны - блок 24 угломестной оси антенны.
В состав блоков 22 и 24 входят датчики углов с устройствами обработки сигналов, а также приводы, обеспечивающие поворот вокруг осей.
Абонентская станция содержит также вычислительное устройство 25, соединенное с блоками 20, 22 и 24, а также подсоединенные к вычислительному устройству 25 устройство 26 индикации угла места абонентской станции и устройство 27 индикации азимута абонентской станции.
Антенна 18 абонентской станции предназначена для усиления радиотелевизионного сигнала 28, приходящего от ретранслятора.
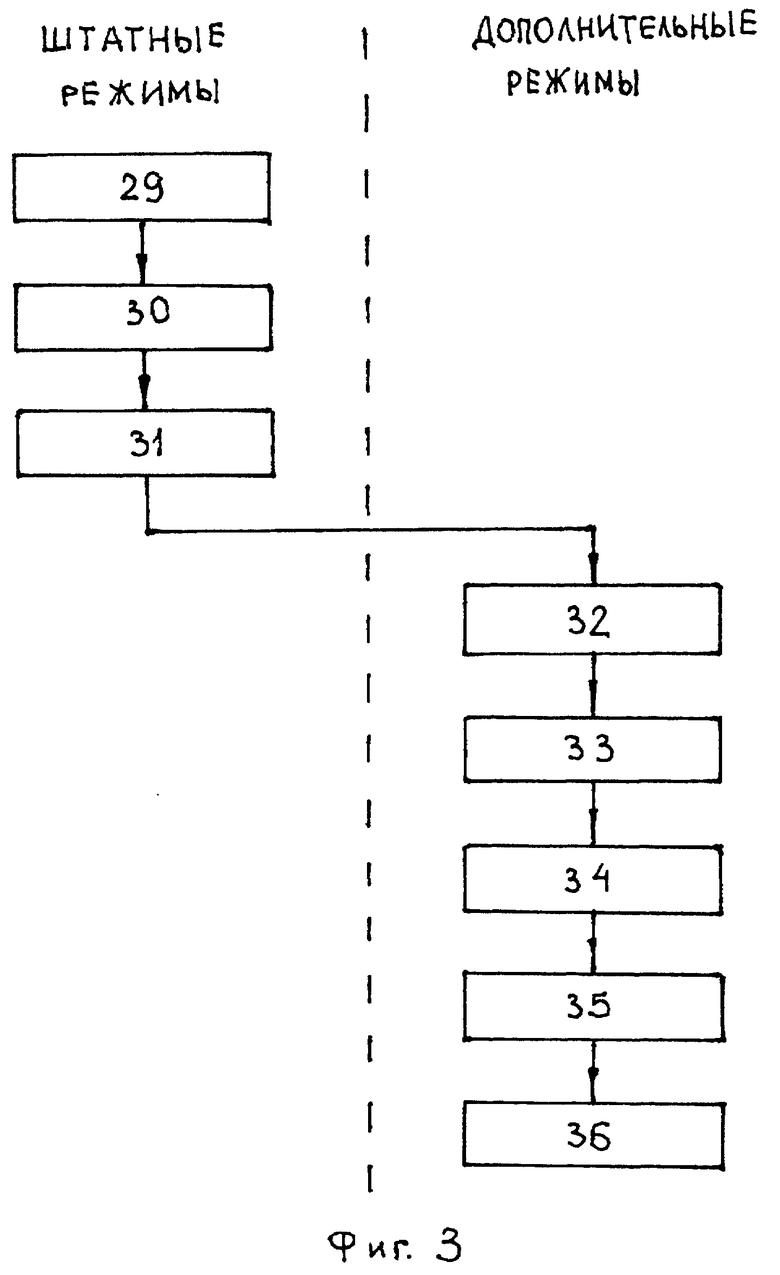
На фиг.3 изображены режимы:
29 - наведение приемной антенны ретранслятора на источник сигнала;
30 - программное наведение передающей антенны ретранслятора на абонентскую станцию;
31 - наведение антенны абонентской станции на ретранслятор;
32 - сканирование передающей антенны ретранслятора по углу места;
33 - сканирование передающей антенны ретранслятора по азимуту;
34 - ввод поправок в вычислительное устройство ретранслятора и расчет углов коррекции угла места и азимута абонентской станции;
35 - наведение передающей антенны ретранслятора по скорректированному углу места на абонентскую станцию;
36 - наведение передающей антенны ретранслятора по скорректированному азимуту на абонентскую станцию.
На фиг.3 показаны известные штатные режимы наведения антенн ретранслятора и абонентской станции, а также новые дополнительные режимы, использование которых позволило обеспечить получение указанного технического результата.
Блок-схема отражает последовательность режимов и их взаимосвязь.
При установке и вводе ретранслятора в эксплуатацию производится его начальная выставка. При этом обычно при помощи шайб и прокладок, а также измерительных средств (уровень, теодолит) осуществляется выставка азимутальных осей антенн перпендикулярно горизонтальной плоскости. Взаимная привязка азимутальных систем (нулевых азимутальных отсчетов) приемной и передающей антенн производится при изготовлении ретранслятора с помощью посадочных штифтов, если используется общее основание для обеих антенн. При раздельных основаниях антенн их азимутальная привязка осуществляется при установке ретранслятора с помощью теодолита и технологических зеркал. Привязка азимутальной измерительной системы ретранслятора к меридиану проводится с помощью дополнительных технических средств (радиокомпас, гирокомпас и т.д.).
Использование дополнительных режимов сканирования передающей антенны 3 (фиг.1) ретранслятора по углу места и азимуту позволяет существенно уменьшить ошибки наведения этой антенны на абонентскую станцию по данным углам. Это обеспечивается благодаря реализации обратной связи по сигналу, излучаемому передающей антенной 3 ретранслятора и измеряемому антенной 18 (фиг.2) абонентской станции. Компенсируются по углу места ошибки горизонтирования и навигационная, а по азимуту - ошибки определения меридиана и навигационная.
В предложенном изобретении в качестве физически реализуемого азимутального базового направления предлагается использование направления оптической оси приемной антенны 1 ретранслятора на источник сигнала. При этом направление меридиана, которое используется в программе наведения передающей антенны 3 ретранслятора, находят расчетным путем. Анализ проводится для наиболее распространенного случая, когда источником сигнала является КА.
Ошибка программного наведения передающей антенны 3 на абонентскую станцию по азимуту является суммой ошибки положения КА на орбите, навигационной ошибки, а также приборных ошибок (отработки угла) приемной и передающей антенн 1 и 3.
Ошибка положения современных КА («Галс», «Экспресс») составляет ±12 угловых минут. Это меньше, чем ошибка радиокомпаса.
Для рассматриваемого примера ретранслятора суммарная ошибка программного наведения передающей антенны 3 по азимуту (без использования дополнительных режимов) превышает допустимое значение.
Существенно также, что в предлагаемом способе за счет введения обратной связи по сигналу компенсируются погрешности начальной установки передающей антенны 3 по углу места и азимуту. С учетом того, что при точном наведении приемной антенны 1 по сигналу аналогичные погрешности приемной антенны 1 также компенсируются, предлагается использовать приемную и передающую антенны 1 и 3 с раздельными основаниями. Это позволяет значительно (на 40-70 кг) сократить массу ретранслятора.
Поскольку при начальной установке ретранслятора горизонтирование и привязка азимутальных систем приемной и передающей антенн 1 и 3 не проводятся, это позволяет уменьшить трудоемкость проводимых работ и тем самым упростить эксплуатацию ретранслятора.
При установке ретранслятора на стационарной площадке ошибка горизонтирования не превышает 15-20 угловых минут, а ошибка привязки азимутальных систем антенн не превышает 5-10 угловых минут. Поэтому для рассматриваемых ретрансляторов величина сигнала, принимаемого антенной 18 (фиг.2) абонентской станции, лежит в допустимых пределах. В предлагаемом способе допускается уменьшение сигнала от максимального значения по мощности на 3 дБ (по напряжению - на 30 процентов).
Предложенный способ передачи сигнала СВЧ реализуется следующим образом.
После подачи на ретранслятор питания осуществляют последовательно три известных штатных режима: 29 (фиг.3) - наведение приемной антенны ретранслятора на источник сигнала; 30 - программное наведение передающей антенны ретранслятора на абонентскую станцию; 31 - наведение антенны абонентской станции на ретранслятор.
Наведение приемной антенны 1 (фиг.1) ретранслятора на источник сигнала проводят с использованием программного наведения и точного наведения по принимаемому сигналу. Захват источника сигнала производят при круговом поиске по азимуту. По найденному при точном наведении азимуту источника сигнала в вычислительном устройстве 14 ретранслятора определяют положение меридиана и рассчитывают азимут абонентской станции, который используют для программного наведения передающей антенны 3 на абонентскую станцию по азимуту.
Программное наведение по углу места приемной и передающей антенн 1 и 3 ретранслятора и антенны 18 (фиг.2) абонентской станции проводят на рассчитанные от горизонтальной плоскости углы.
Программное наведение антенны 18 абонентской станции на ретранслятор по азимуту осуществляют путем кругового поиска по азимуту или с использованием дополнительных технических средств для определения меридиана.
В рассматриваемом примере ретранслятора и абонентской станции, приведенных на фиг.1 и фиг.2, при точном наведении приемной антенны 1 (фиг.1) ретранслятора на источник сигнала и антенны 18 (фиг.3) абонентской станции на ретранслятор используется экстремальный метод наведения, который не требует дополнительных аппаратурных затрат. Для реализации точного наведения приемной антенны 1 (фиг.1) на источник сигнала используют блок 5 и вычислительное устройство 14. Точное наведение приемной антенны 1 на источник сигнала после начального наведения обеспечивается во время всех последующих режимов. Его осуществляют как программное наведение с компенсацией уходов КА по принимаемому сигналу. Изменение сигнала фиксируют с помощью блока 5.
Точное наведение антенны 18 (фиг.2) на ретранслятор осуществляют с помощью блока 20 и вычислительного устройства 25. Коррекцию по сигналу проводят путем изменения программных значений углов места и азимута ретранслятора. Затем, после отработки углов коррекции, осуществляют стабилизацию или механическую фиксацию антенны 18 в этом положении во время всех последующих режимов, а также в процессе эксплуатации.
Разворот приемной антенны 1 (фиг.1) вокруг азимутальной оси 6 и угломестной оси 8 проводят, соответственно, с помощью блоков 7 и 9, управляемых от вычислительного устройства 14.
Разворот передающей антенны 3 вокруг азимутальной оси 10 и угломестной оси 12 производят, соответственно, с помощью блоков 11 и 13, управляемых от вычислительного устройства 14.
Разворот антенны 18 (фиг.2) вокруг азимутальной оси 21 и угломестной оси 23 проводят, соответственно, с помощью блоков 22 и 24, управляемых от вычислительного устройства 25.
После проведения режима 31 (фиг.3) осуществляют дополнительный режим 32 - сканирование передающей антенны ретранслятора по углу места.
Время точного наведения антенны 18 (фиг.2) на ретранслятор и стабилизации ее положения должно быть не менее 30 секунд до начала режима 32 (фиг.3).
Перед началом сканирования передающей антенны 3 (фиг.1) по углу места ее переводят из начального положения в исходное положение, которое выбирают, исходя из требуемого диапазона изменения сигнала, принимаемого антенной 18 (фиг.2).
Разворот передающей антенны 3 (фиг.1) при этом проводят на рассчитанный угол, введенный в вычислительное устройство 14 при изготовлении ретранслятора. Отработку этого угла производят с помощью блока 13, управляемого от вычислительного устройства 14.
При этом развороте угол места передающей антенны 3, отсчитываемый от нулевого положения, уменьшается на (1,25-1,5) ширины диаграммы направленности (по уровню 3 дБ) передающей антенны 3. Это изменение угла места должно быть не меньше суммы допустимой ошибки программного наведения передающей антенны 3 на абонентскую станцию (0,5 ширины диаграммы направленности) и выбранного угла (0,75 ширины диаграммы направленности), соответствующего уменьшению сигнала от максимального значения по мощности на 10 дБ и по напряжению на 70 процентов.
Угол сканирования передающей антенны 3 выбирают таким, чтобы обеспечить изменение сигнала, принимаемого антенной 18 (фиг.2) по мощности на 10 дБ от максимального значения. Для указанного исходного положения угол сканирования должен составлять (2,5-3) ширины диаграммы направленности (по уровню 3 дБ) передающей антенны 3 (фиг.1). Угол сканирования вводят в вычислительное устройство 14 при изготовлении ретранслятора.
В предлагаемом способе используется дискретное (пошаговое) сканирование передающей антенны 3. Оно может быть реализовано с помощью шагового мотора или двигателя постоянного тока, управляемого дискретными сигналами.
Двигатель может управляться импульсами постоянного напряжения одинаковой длительности, подаваемой на обмотку ротора. Более точным является метод, при котором двигателем по программе отрабатываются одинаковые углы (шаги). Здесь может быть обеспечена высокая точность при использовании прецизионных датчиков угла.
Привод с шаговым мотором характеризуется меньшей точностью. Она в значительной степени ограничивается неточностью изготовления зубчатых передач. Преимущества такого привода: простая аппаратура, высокое быстродействие, а также механическая фиксация положения антенны после отработки угла. Поэтому целесообразно использование шагового мотора в том случае, когда обеспечивается требуемая точность.
В рассматриваемом примере ретранслятора в угломестном и азимутальном приводах передающей антенны 3 применяется шаговый мотор. Это позволяет сократить массу аппаратуры при обеспечении требуемой точности.
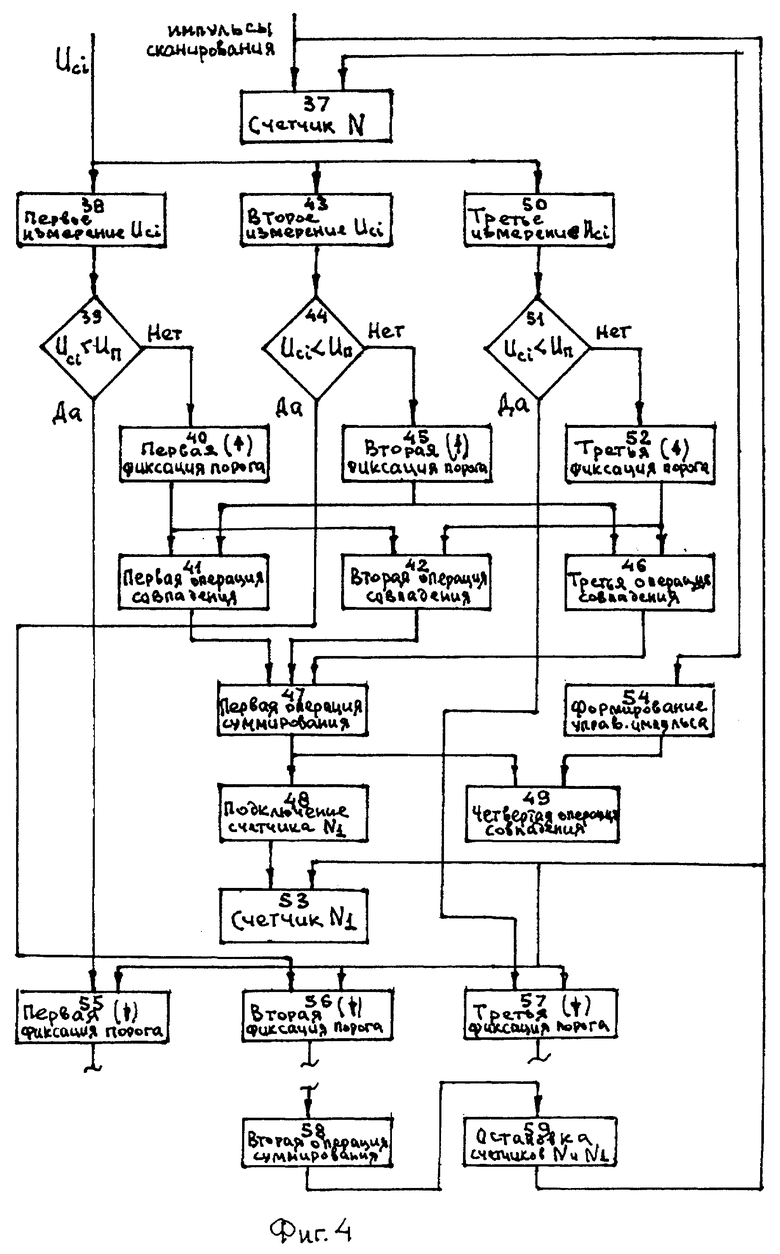
На фиг.4 приведена блок-схема подпрограммы коррекции программных углов места и азимута абонентской станации.
Запуск подпрограммы производят в режиме 32 (фиг.3) генерацией синхронизирующего импульса. Импульс излучается передающей антенной 3 (фиг.1), находящейся в начальном положении, и принимается антенной 18 (фиг.2). Длительность синхронизирующего импульса составляет (0,03-0,1) длительности импульса сканирования. В рассматриваемом примере ретранслятора длительность импульса сканирования составляет 0,15 секунды.
По переднему фронту синхронизирующего импульса в вычислительном устройстве 14 (фиг.1) начинается генерация импульсов сканирования передающей антенны 3 (фиг.1) по углу места (первый шаг).
Величину синхронизирующего импульса выбирают такой величины, чтобы значение сигнала, принимаемого антенной 18 (фиг.2), было больше максимального значения по напряжению в (1,4-2) раза.
По переднему фронту принимаемого антенной 18 (фиг.2) синхронизирующего импульса в вычислительном устройстве 25 абонентской станции начинается генерация импульсов, равных по длительности импульсу сканирования.
Счет этих генерируемых импульсов, начиная с первого, осуществляют в счетчике N вычислительного устройства 25 (операция 37, фиг.4)
По сформированному в ретрансляторе первому импульсу сканирования начинают поворот передающей антенны 3 (фиг.1) по углу места (первый шаг) в сторону уменьшения угла - перевод из начального положения в исходное.
Передающая антенна 3 займет исходное положение через Nн импульсов, что соответствует рассчитанному углу, введенному в вычислительное устройство 14.
Начиная с импульса сканирования (Nн+1), производят разворот передающей антенны 3 на заданный угол сканирования.
Начиная с этого же импульса сканирования (первого шага), в вычислительном устройстве 25 (фиг.2) проводят первое измерение значения сигнала Uci (операция 38, фиг.4), принимаемого антенной 18 (фиг.2) и преобразуемого в блоке 20. Рассчитанное число импульсов Nн вводят в вычислительное устройство 25 до установки ретранслятора. Интервал времени Δt1 между началом импульса сканирования и первым измерением выбирают равным (0,3-0,4) длительности импульса сканирования. Этот интервал времени должен быть больше времени переходного процесса, обусловленного механическим перемещением передающей антенны 3 (фиг.1) (на один шаг) и изменением сигнала в блоке 20 (фиг.2).
Результат первого измерения сравнивают с пороговым значением (операция 39, фиг.4):

где Uсм - максимальное значение сигнала, К - постоянный коэффициент.
Значения Uсм и К вводят в вычислительное устройство 25 (фиг.2) абонентской станции до установки ретранслятора
При сканировании передающей антенны 3 (фиг.1) коррекцию программного угла места абонентской станции производят по фиксации порогового значения сигнала UП. Для уменьшения погрешности измерения это значение выбирают на крутом участке диаграммы направленности передающей антенны 3. Его берут равным (0,4-0,6) максимального значения сигнала Uсм, т.е. в формуле (1) К=(0,4-0,6).
Исходное положение передающей антенны 3 выбирают таким образом, чтобы для первого и нескольких последующих шагов (не менее одного) величина сигнала Uci была меньше порогового значения.
В предлагаемом способе степень фильтрации принимаемого сигнала и, соответственно, снижения уровня шумов в приемном тракте и блоке 20 (фиг.2) абонентской станции ограничена необходимостью приема короткого по длительности синхронизирующего импульса.
Поэтому для защиты от шумов (помехи) при пересечении порога используют три последовательных измерения во время одного импульса сканирования. Прохождение порога фиксируют при совпадении результатов двух измерений из трех.
Длительность всех трех измерений (измерительных импульсов) одинакова и составляет (0,05-0,1) длительности импульса сканирования. Интервалы времени между измерительными импульсами составляют (0,1-0,15) длительности импульса сканирования. Время от окончания третьего измерительного импульса до окончания импульса сканирования должно быть не меньше 0,1 длительности импульса сканирования.
При выполнении условия:

в вычислительном устройстве 25 (фиг.2) производят первую (↑) фиксацию порога (операция 40, фиг.4).
Знак (↑) означает, что фиксируют превышение порога (сигнал возрастает). При этом в вычислительном устройстве 25 (фиг.2) подают постоянный сигнал для последующего проведения операций: 41 (фиг.4) - первая операция совпадения и 42 - вторая операция совпадения.
После этого проводят операцию 43 - второе измерение сигнала Uci. Его осуществляют на этом же шаге передающей антенны 3 (фиг.1) через время Δt2 от начала импульса сканирования.
Результат второго измерения сигнала сравнивают с пороговьм значением (операция 44, фиг.4). Если условие (2) не выполняется, то превышение порогового значения сигнала не фиксируется. При этом возможны два варианта: первый вариант - сработала схема защиты от помехи (шума), т.е. помеха привела к ложному результату при первом измерении, второй вариант - сбой (в сторону уменьшения сигнала) происходит при втором измерении.
Если условие (2) выполняется, то в вычислительном устройстве 25 (фиг.2) производят вторую (↑) фиксацию порога (операция 45, фиг.4). При этом в вычислительном устройстве 25 (фиг.2) подают постоянный сигнал для проведения операций 41 (фиг.4) и 46 - третья операция совпадения.
В результате этого осуществляют первую операцию совпадения (операция 41). Постоянный сигнал, полученный при выполнении этой операции, через операцию 47 (первая операция суммирования) подают для проведения операции 48 - подключение счетчика N1 и для последующего осуществления операции 49 - четвертая операции совпадения.
Возможна фиксация превышения порога при втором измерении в том случае, когда такой фиксации не было при первом измерении сигнала. Это может произойти в результате сбоя при втором измерении (с превышением порога) или при сбое при первом измерении с уменьшением суммарного сигнала (с помехой) ниже порога. В данном случае операции 40 не происходит. Поэтому, соответственно, не проводятся операции 41, 47, 48 и 49.
Через время Δt3 после начала данного импульса сканирования в вычислительном устройстве 25 (фиг.2) последовательно производят операции: 50 (фиг.4) - третье измерение Uci и 51 - сравнение измеренного сигнала с пороговым значением. При выполнении условия (2) в вычислительном устройстве 25 (фиг.2) проводят третью (Т) фиксацию порога (операция 52, фиг.4).
При этом в вычислительном устройстве 25 (фиг.2) подают постоянный сигнал для проведения операций: 42 (фиг.4) - вторая операция совпадения и 46 - третья операция совпадения.
Если в операции 39 при первом измерении и в операции 44 при втором измерении условие (2) выполнялось, то в вычислительном устройстве 25 (фиг.2) производят вторую (операция 42) и третью (операция 46) операции совпадения. При этом подают команды на проведение операции суммирования 47. Однако операция 47 была выполнена раньше (после второго измерения сигнала).
Если же условие (2) выполняется только при одном измерении (первом или втором), то при выполнении условия (2) при проведении операции 51 при третьем измерении сигнала в вычислительном устройстве 25 (фиг.2) последовательно осуществляют указанные операции 52 (фиг.4), 42 (или 46), 47, 48 и 49.
Таким образом, формирование команды о пересечении порогового значения сигнала в вычислительном устройстве 25 (фиг.2) осуществляют при совпадении результатов двух измерений сигнала из трех, проводимых в течение одного импульса сканирования.
Начиная с данного импульса сканирования проводят операцию 53 - счетчик N1 (счет импульсов в счетчике N1).
По переднему фронту следующего импульса сканирования в вычислительном устройстве 25 (фиг.2) последовательно проводят операции: 54 (фиг.4) - формирование управляющего импульса и 49 - четвертая операция совпадения. Постоянный сигнал, полученный в результате выполнения операции 49, подают для последующего выполнения операций (55, 56 и 57) фиксации порога при уменьшении измеряемого сигнала.
Тем самым производят подготовку программы вычислительного устройства 25 (фиг.2) к последующему пересечению сигналом порогового значения.
До тех пор, пока величина сигнала Uci превышает пороговое значение, для каждого шага продолжается выполнение операций 37 и 53, т.е. работают счетчики N и N1.
При выполнении условия:

при первом измерении Uci в результате выполнения операции 39 в вычислительном устройстве 25 (фиг.2) подают сигнал на проведение операции 55 (фиг.4) - первой (↓) фиксации порога при уменьшении измеряемого сигнала. Знак (↓) означает, что сигнал уменьшается.
Фиксацию порога при уменьшении сигнала осуществляют аналогично фиксации порога при увеличении сигнала с помощью трех измерений.
На фиг.4 показаны операция 56 - вторая (↓) фиксация порога и операция 57 - третья (↓) фиксация порога.
При совпадении двух результатов - выполнении условия (3) - через соответствующие операции совпадения в вычислительном устройстве 25 (фиг.2) формируют сигнал для последовательного проведения операций: 58 (фиг.4) - вторая операция суммирования и 59 - остановка счетчиков N и N1. При остановке этих счетчиков в них, соответственно, фиксируется N и N1 импульсов.
После этого в вычислительном устройстве 25 (фиг.2) определяют номер шага, соответствующего направлению оптической оси передающей антенны 3 (фиг.1) на абонентскую станцию и отображают его на устройстве 26 (фиг.2) индикации угла места абонентской станции.
Оптическая ось передающей антенны 3 (фиг.1) направлена на абонентскую станцию при угле места передающей антенны 3 УМс. При этом сигнал, принимаемый антенной 18 (фиг.2), равен максимальному значению. Величина УМс равна полусумме углов места передающей антенны 3 (фиг.1), соответствующих пороговым значениям сигнала, принимаемого абонентской станцией. Величину УМс находят из формулы:

где: УМи - угол места исходного положения передающей антенны 3, Δ УМш - величина шага при сканирования передающей антенны 3 по углу места, Nc - номер шага, соответствующий углу УМс.
Значение Nc определяют с помощью формулы:

Сканирование передающей антенны 3 по углу места продолжают после остановки счетчиков N и N1 до поворота на заданный угол сканирования УМс3, величина которого от исходного положения составляет (2,5-3) диаграммы направленности передающей антенны 3 (по уровню 3 дБ). После этого передающую антенну 3 переводят в ее начальное положение и фиксируют в этом положении.
После этого аналогично проводят сканирование передающей антенны 3 ретранслятора по азимуту (режим 33, фиг.3). Найденный номер шага, соответствующий направлению оптической оси передающей антенны 3 (фиг.1) на абонентскую станцию, отображают на устройстве 27 (фиг.2) индикации азимута абонентской станции.
Сканирование передающей антенны 3 (фиг.1) по азимуту продолжают после остановки счетчиков N и N1 до отработки на заданный угол сканирования, потом ее переводят в начальное положение и фиксируют в этом положении.
Затем осуществляют режим 34 (фиг.3) - ввод поправок в вычислительное устройство 14 (фиг.1) ретранслятора и расчет углов коррекции угла места и азимута абонентской станции.
В качестве поправок в вычислительное устройство 14 вводят номера шагов, соответствующие направлению оптической оси передающей антенны 3 на абонентскую станцию по углу места и азимуту. Ввод в вычислительное устройство 14 осуществляют с помощью устройства 15 ввода данных.
Отработку угла коррекции передающей антенны 3 проводят из начального положения, которому соответствует Nн шагов от исходного положения. Количество отрабатываемых при этом шагов коррекции Nк равно:

если Nc>Nн, и

если Nc<Nн.
Возможен случай, когда Nc=Nн и Nк=0, т.е. коррекцию не проводят.
Угол коррекции по углу места находят в вычислительном устройстве 14 с помощью формул (4), (5), (6) и (7). Угол коррекции по азимуту определяют с помощью аналогичных формул.
Затем последовательно проводят режимы: 35 (фиг.3) - наведение передающей антенны 3 (фиг.1) ретранслятора по скорректированному углу места на абонентскую станцию; 36 (фиг.3) - наведение передающей антенны 3 (фиг.1) ретранслятора по скорректированному азимуту на абонентскую станцию.
Разворот передающей антенны 3 по скорректированному углу места производят с помощью блока 13, а по скорректированному азимуту - с помощью блока 11. Управление блоками 13 и 11 проводится от вычислительного устройства 14.
После этого осуществляют передачу сигнала СВЧ на абонентскую станцию.
В предлагаемом способе благодаря использованию обратной связи по сигналу повышена точность наведения передающей антенны 3 на абонентскую станцию:
- по углу места скомпенсированы ошибки негоризонтальности и навигационная, а также уменьшена ошибка отработки угла;
- по азимуту скомпенсированы ошибки определения положения источника сигнала,
наведения приемной антенны 1 на источник сигнала, навигационная, а также уменьшена ошибка отработки угла.
В предлагаемом способе обеспечивается одинаковая точность наведения передающей антенны 3 на абонентскую станцию по углу места и азимуту. Суммарная погрешность наведения включает ошибку определения направления оптической оси передающей антенны 3 на абонентскую станцию, полученную при сканировании передающей антенны 3, и ошибку отработки угла коррекции.
Погрешность направления оптической оси передающей антенны 3 на абонентскую станцию по углу места ΔУМс определяют как случайную ошибку полусуммы двух углов места УМп (при пороговом значении сигнала) из формулы:
где ΔУМп - погрешность определения угла места передающей антенны 3 при пороговом значении сигнала. Погрешность ΔУМп включает ошибку дискретности (шагового сканирования) - Δшс, которая равна половине шага передающей антенны 3, и ошибку изготовления зубчатой передачи (шагового мотора и редуктора) - Δзп. Обе ошибки, как и все остальные, являются случайными величинами, поэтому:

Величина угла коррекции в соответствии с формулами (6) и (7) составляет Nк шагов. Ошибка отработки угла коррекции ΔУМк включает ошибку дискретности и изготовления зубчатой передачи. Поэтому для определения ошибки ΔУМк может быть использована формула (9).
Суммарную погрешность наведения передающей антенны 3 на абонентскую станцию по углу места ΔУМΣ находят из формулы:

Для рассматриваемого примера (с использованием шагового мотора) принимаем: величина шага сканирования - 4 угловые минуты (ошибка Δшс равна 2 угловым минутам); ошибка изготовления зубчатой передачи - 4 угловые минуты.
Суммарная ошибка ΔУМΣ составляет 5,4 угловых минут.
В предлагаемом способе, кроме компенсации указанных выше ошибок, также компенсируется ошибка выставки нуля шагового мотора относительно базовой плоскости (Δшо) благодаря привязке к излучаемому сигналу. Тем самым обеспечивается уменьшение ошибки отработки угла.
Если предлагаемый способ не используется, то при оценке погрешности наведения передающей антенны 3 на абонентскую станцию по углу места ΔУМΣ необходимо учитывать указанные выше погрешности. При этом ΔУМΣ определяют с помощью формулы:

где Δгп - ошибка негоризонтальности (при выставке используются шайбы, прокладки, а также теодолит, или уровень), ΔУМн - навигационная ошибка, Δпн - ошибка программного наведения (отработки угла), причем:

При определении местоположения ретранслятора и абонентской станции с помощью спутниковой радионавигационной системы погрешность (навигационная ошибка Δн) в настоящее время составляет 30 м. В ближайшие годы она должна быть уменьшена до 5 м. Угломестная ошибка при этом находится их формулы:

где L - расстояние между ретранслятором и абонентской станцией (проекция в горизонтальной плоскости).
Если принять ошибку Δн=5 м, то величина ΔУМн невелика: для L=6 км она составляет 4 угловые минуты. Если принять ошибку Δн=30 м, то ошибка ΔУМн возрастает в 6 раз и становится преобладающей.
Для рассматриваемого примера принимаем: Δгп=3 угловые минуты, ΔУМн=4 угловые минуты, Δшо=3 угловые минуты. С помощью формул (11) и(12) находим
ΔУМΣ=7,4 угловых минут.
Таким образом, благодаря применению предложенного способа точность наведения передающей антенны 3 на абонентскую станцию по углу места повысилась в 1,35 раза.
Отметим, что результат будет существенно лучше, если принять Δн=30 м.
Более эффективно применение предложенного способа при наведении передающей антенны 3 на абонентскую станцию по азимуту.
Рассматриваем более распространенный случай, когда источником сигнала является КА. Суммарную погрешность наведения передающей антенны 3 на абонентскую станцию по азимуту (без учета предлагаемого способа) находят из формулы:

где Δка - ошибка положения КА,
Δтн - ошибка точного наведения приемной антенны 1 на КА;
ΔА3н - ошибка местоположения ретранслятора и абонентской станции по азимуту (навигационная ошибка);
Δпнс - ошибка программного наведения (отработки угла) передающей антенны 3 на абонентскую станцию.
Ошибку Δтн определяют с помощью формул (8) и (9), а ошибку Δпнс - с помощью формулы (12).
Для рассматриваемого примера принимаем:
Δка=12 угловых минут, Δтн=3,2 угловых минут, ΔА3н=4 угловые минуты, Δпнс=5,4 угловых минут.
С помощью формулы (14) находим ΔА3Σ=14,1 угловых минут.
Следовательно, точность наведения передающей антенны 3 на абонентскую станцию по азимуту увеличилась в 2,6 раза.
Приведенное описание способа позволяет сделать следующее заключение.
Использование в предлагаемом способе обратной связи по сигналу при сканировании передающей антенны позволяет повысить точность наведения передающей антенны ретранслятора на абонентскую станцию благодаря компенсации ошибки положения КА, ошибки наведения приемной антенны ретранслятора на КА, навигационных ошибок, ошибки негоризонтальности, а также благодаря уменьшению ошибок отработки углов. Это приводит к повышению скорости передачи информации и улучшению помеховой обстановки.
Для остронаправленных антенн (погрешность наведения 12 угловых минут) точность наведения повышается в 1,35-2,6 раза.
Применение предлагаемого способа позволяет скомпенсировать погрешности начальной установки ретранслятора и использовать антенны с раздельными основаниями. Это приводит к уменьшению массы ретранслятора на 40-70 килограммов.
Отказ от операций горизонтирования ретранслятора и привязки азимутальных систем его антенн позволяет уменьшить трудоемкость работ при начальной установке ретранслятора, а также при проведении регламентных и ремонтных работ. Благодаря этому упрощается эксплуатация ретранслятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ПЕРЕДАЮЩЕЙ АНТЕННЫ РЕТРАНСЛЯТОРА | 2007 |
|
RU2328824C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2008 |
|
RU2368077C1 |
| СПОСОБ ПЕРЕДАЧИ РАДИОТЕЛЕВИЗИОННОГО СИГНАЛА | 2011 |
|
RU2479923C2 |
| СПОСОБ ПЕРЕДАЧИ РАДИОТЕЛЕВИЗИОННОГО СИГНАЛА | 2006 |
|
RU2308154C1 |
| УСТРОЙСТВО СВЧ-СВЯЗИ | 2005 |
|
RU2309542C2 |
| СПОСОБ НАВЕДЕНИЯ АНТЕНН РЕТРАНСЛЯТОРА | 2006 |
|
RU2368076C2 |
| СПОСОБ НАВЕДЕНИЯ ПЕРЕДАЮЩЕЙ АНТЕННЫ РЕТРАНСЛЯТОРА НА АБОНЕНТСКУЮ СТАНЦИЮ | 2005 |
|
RU2308157C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2009 |
|
RU2409893C2 |
| СИСТЕМА И СПОСОБ СЛЕЖЕНИЯ АНТЕННОЙ СИСТЕМЫ ЗЕМНОЙ СТАНЦИИ ПОДВИЖНОЙ СПУТНИКОВОЙ СВЯЗИ | 2023 |
|
RU2821956C1 |
| АБОНЕНТСКАЯ ЗЕМНАЯ СТАНЦИЯ ПОДВИЖНОЙ СПУТНИКОВОЙ СВЯЗИ | 2023 |
|
RU2816866C1 |
Изобретение относится к системам связи и предназначено для ретрансляции радиотелевизионных сигналов. Технический результат, заключающийся в повышении точности наведения передающей антенны ретранслятора на абонентскую станцию, состоит в том, что способ передачи сигнала СВЧ включает наведение приемной антенны ретранслятора на источник сигнала, программное наведение передающей антенны ретранслятора на абонентскую станцию, наведение антенны абонентской станции на ретранслятор. Наведение приемной антенны ретранслятора на источник сигнала проводят с использованием программного наведения и точного наведения по принимаемому сигналу. Захват источника сигнала призводят при круговом поиске по азимуту, после нахождения источника сигнала в вычислительном устройстве определяют положение меридиана и рассчитывают азимут абонентской станции, который используют для программного наведения передающей антенны на абонентскую станцию по азимуту. Программное наведение по углу места приемной и передающей антенн ретранслятора и антенны абонентской станции проводят на рассчитанные от горизонтальной плоскости углы. Программное наведение антенны абонентской станции на ретранслятор по азимуту осуществляют путем кругового поиска по азимуту или с использованием дополнительных технических средств для определения меридиана. 4 ил.
Способ передачи сигнала СВЧ, включающий наведение приемной антенны ретранслятора на источник сигнала с использованием программного наведения и точного наведения по принимаемому сигналу, программное наведение передающей антенны ретранслятора на абонентскую станцию в соответствии с рассчитанными углом места и азимутом, а также проводимое после наведения передающей антенны наведение антенны абонентской станции на ретранслятор, осуществляемое последовательно путем предварительного программного наведения, точного наведения по принимаемому от ретранслятора сигналу и стабилизации положения антенны, отличающийся тем, что после точного наведения антенны абонентской станции на ретранслятор проводят поочередное пошаговое сканирование передающей антенны ретранслятора сначала по углу места, а потом по азимуту, причем перед началом сканирования передающую антенну переводят из начального положения в исходное положение путем подачи импульсов сканирования, при этом соответствующий угол передающей антенны уменьшают на (1,25-1,5) ширины диаграммы направленности передающей антенны ретранслятора, перемещение из начального положения начинают с передачи синхронизирующего импульса от передающей антенны ретранслятора на антенну абонентской станции, при этом длительность синхронизирующего импульса составляет (0,03-0,1) длительности импульса сканирования, после приема синхронизирующего импульса в вычислительном устройстве абонентской станции осуществляют формирование импульсов и их счет с помощью первого счетчика, причем длительность этих импульсов равна длительности импульсов сканирования, формируемых в вычислительном устройстве ретранслятора, затем при движении передающей антенны ретранслятора из исходного положения в абонентской станции проводят дискретное измерение принимаемого от передающей антенны ретранслятора сигнала, при возрастании сигнала, превышающем величину порога, составляющего (0,4-0,6) максимального значения сигнала, в вычислительном устройстве абонентской станции формируют команду, по которой начинается счет импульсов во втором счетчике, а затем при снижении сигнала до значения порога осуществляют остановку обоих счетчиков, при этом команды на включение второго счетчика и остановку обоих счетчиков в вычислительном устройстве абонентской станции формируют при совпадении результатов двух измерений сигнала из трех, проводимых в течение одного импульса сканирования, после этого в вычислительном устройстве абонентской станции определяют номер шага, соответствующего направлению оптической оси передающей антенны ретранслятора на абонентскую станцию, и отображают его соответственно на устройстве индикации угла места и азимута абонентской станции, затем найденные номера шагов вводят в вычислительное устройство ретранслятора, в котором определяют углы коррекции по углу места и азимуту, после чего производят разворот передающей антенны на абонентскую станцию с фиксацией ее положения сначала по скорректированному углу места, а потом по скорректированному азимуту, после этого осуществляют передачу сигнала СВЧ.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОКАЗАНИЙ К ДИФФЕРЕНЦИРОВАННОМУ ЛЕЧЕНИЮ БОЛЬНЫХ С РАННЕЙ ГИПЕРТЕНЗИЕЙ ПОСЛЕ АНТИГЛАУКОМАТОЗНЫХ ОПЕРАЦИЙ ФИЛЬТРУЮЩЕГО ТИПА | 2006 |
|
RU2308254C1 |
| СПОСОБ НАВЕДЕНИЯ ПЕРЕДАЮЩЕЙ АНТЕННЫ РЕТРАНСЛЯТОРА НА АБОНЕНТСКУЮ СТАНЦИЮ | 2005 |
|
RU2308157C1 |
| СПОСОБ И УСТРОЙСТВО ПЕРЕДАЧИ ДОПОЛНИТЕЛЬНЫХ СИГНАЛОВ ПО ТЕЛЕВИЗИОННЫМ КАНАЛАМ И ПРИМЕНЕНИЕ СПОСОБА ДЛЯ ПЕРЕДАЧИ ИНФОРМАЦИИ | 1996 |
|
RU2193824C2 |
| US 5570097 А, 29.10.1996. | |||

