Изобретение относится к области подъемно-транспортного оборудования, а именно к средствам контроля положения ходовых колес рельсовых подъемно-транспортных машин, в частности грузоподъемных кранов мостового типа, с целью их последующей выверки.
Известны устройства для контроля положения ходовых колес, основанные на измерении расстояний базовой поверхности ходовых колес относительно струны (см. а.с. СССР №893814, №1244076 и №1266832).
Известные устройства конструктивно сложны и громоздки, что ограничивает их применение в стесненных условиях и на высоте.
Из известных устройств наиболее близким по технической сущности к предлагаемому (прототипом) является «Устройство для контроля параллельности базовых струн при выверке крановых колес» (см. а.с. СССР №686976). Известное устройство содержит корпус с базовыми опорами и размещенным на нем уровнем горизонтального положения, соединенный с колесом, а также устройство задания оптической оси, закрепленное на корпусе и оптически взаимодействующее с мишенью.
В указанном устройстве угол перекоса ходовых колес рассчитывается на основании замеров расстояний боковой поверхности ходовых колес относительно базовой струны. Положение последней выверяется посредством устройства задания оптической оси, в роли которого выступает зрительная труба.
Известное устройство характеризуется сложностью конструкции и сравнительно большими габаритами, что затрудняет его применение при ремонте подъемно-транспортных машин в стесненных условиях действующего производства и на высоте. Кроме того, данное устройство не позволяет замерять отклонение положения ходовых колес в вертикальной плоскости, что ограничивает его эксплуатационные возможности.
Задача предлагаемого технического решения - упрощение конструкции и уменьшение размеров устройства, а также расширение его эксплуатационных возможностей.
Решение поставленной задачи достигается тем, что корпус выполнен в виде кронштейна с базовой и перпендикулярными ей горизонтальной и вертикальной поверхностями. Базовая поверхность соединена через базовые опоры с боковой поверхностью колеса. На вертикальной поверхности кронштейна закреплены устройство задания оптической оси и мишень, а на горизонтальной поверхности размещены уровень горизонтального положения и перпендикулярно ему дополнительно уровень вертикального положения корпуса. В качестве базовых опор могут применяться магниты, а в качестве устройства задания оптической оси - лазер. Для удобства настройки мишень может быть выполнена с возможностью смещения по вертикали и горизонтали.
Проведенный анализ общедоступных источников информации об уровне техники не позволил выявить техническое решение, тождественное заявленному, на основании чего делается вывод о неизвестности последнего, т.е. о соответствии представленного в настоящей заявке решения критерию «новизна».
Сопоставительный анализ заявленного решения с известными техническими решениями позволил выявить, что представленная совокупность отличительных признаков неизвестна для специалиста в данной области и не следует явным образом из известного уровня техники, на основании чего делается вывод о соответствии представленного в настоящей заявке решения критерию «изобретательский уровень».
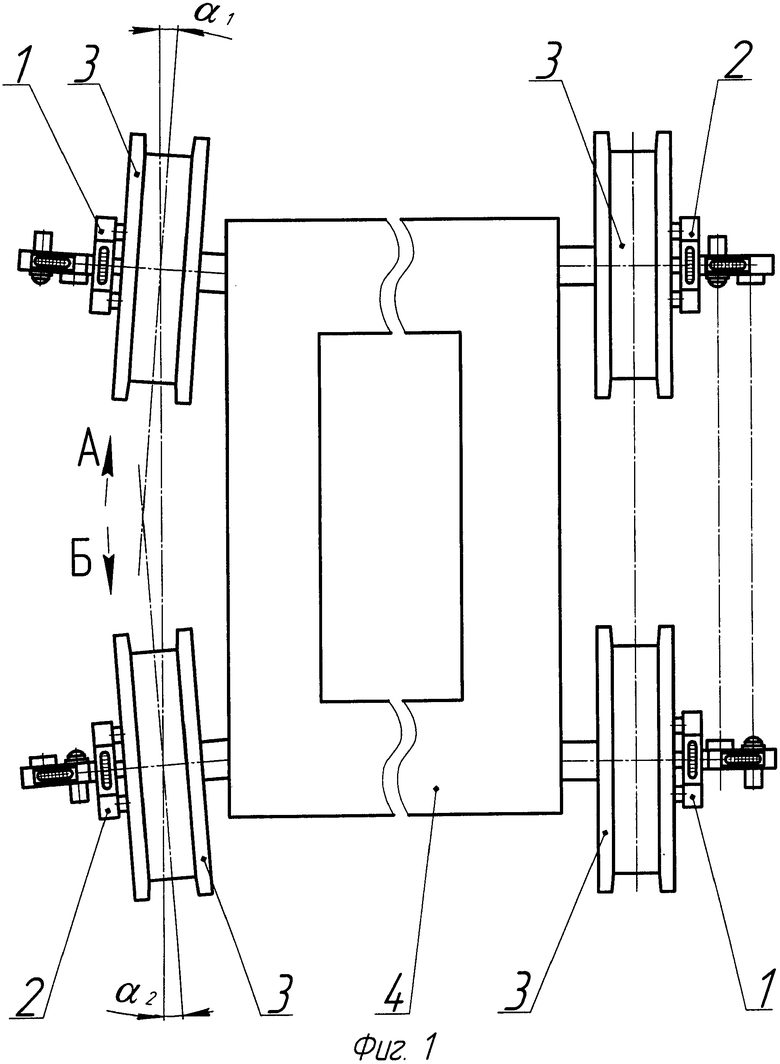
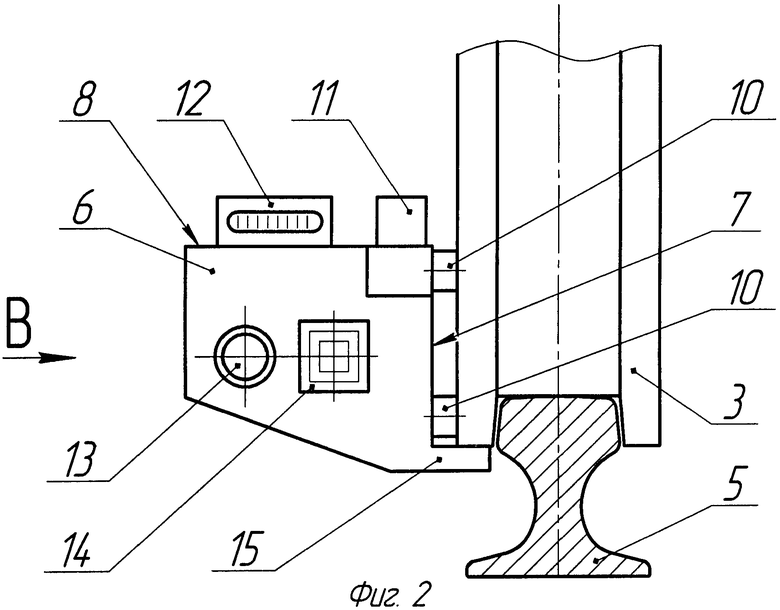
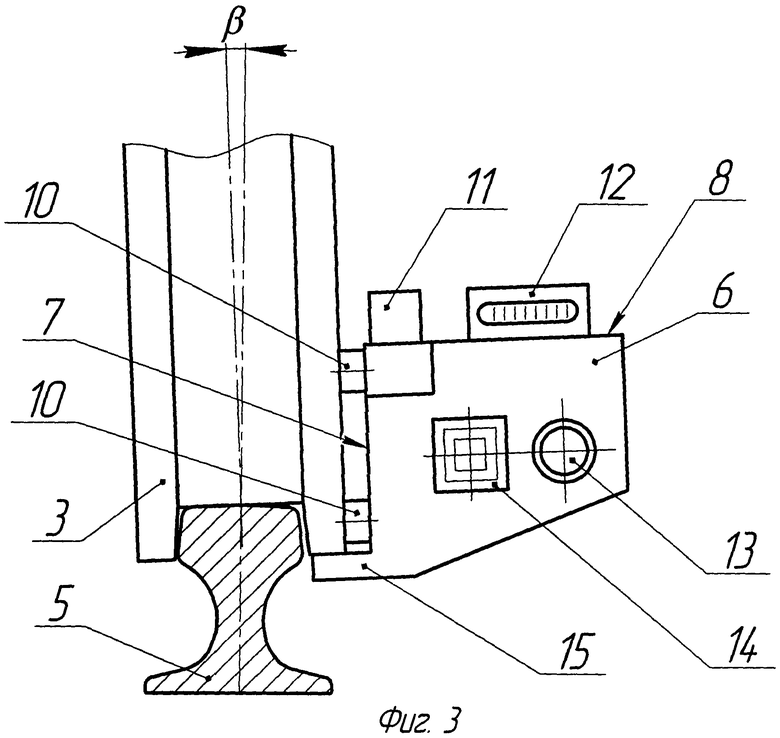
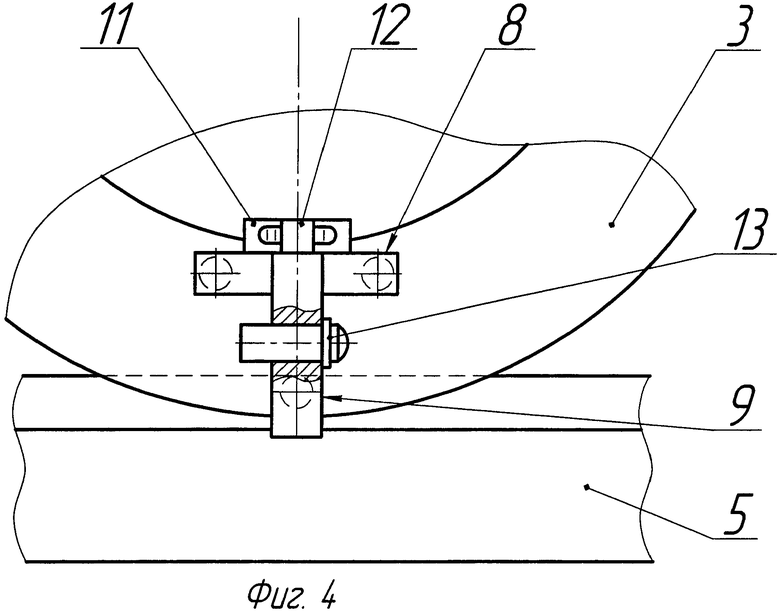
На фиг.1 представлена схема размещения устройств для контроля положения ходовых колес, вид в плане, на фиг.2 - вид А на фиг.1, на фиг.3 - вид Б на фиг.1, на фиг.4 - вид В на фиг.2.
Устройства 1 и 2 для контроля положения ходовых колес 3 устанавливаются друг против друга на ходовых колесах с одной из боковых сторон рамы 4 подъемно-транспортной машины, например, мостового крана. Ходовые колеса 3 могут иметь углы перекоса α1 и α2 относительно оси кранового пути 5 (направления перемещения крана) и угол перекоса β (см. фиг.3) относительно вертикальной плоскости. С левой стороны рамы 4 (фиг.1) показано расположение ходовых колес 3 до их выверки (с перекосом), а справа - после выверки (без перекоса). Устройства 1 и 2 конструктивно аналогичны, но по компоновке имеют зеркальное отображение и смещение взаимного расположения элементов.
Каждое из устройств 1 и 2 состоит из кронштейна 6, имеющего базовую поверхность 7 и перпендикулярные ей горизонтальную 8 и вертикальную 9 поверхности. Кронштейн 6 базируется на боковой поверхности колеса 3 посредством опор 10, в качестве которых могут быть применены постоянные магниты. На горизонтальной поверхности 8 кронштейна 6 размещены уровень горизонтального положения 11 и уровень вертикального положения 12. На вертикальной поверхности 9 закреплены устройство задания оптической оси 13, например лазер, и мишень 14, которая может быть выполнена с возможностью регулировки при настройке за счет смещения по вертикали и горизонтали. Для базирования кронштейнов 6 устройств 1 и 2 на одной высоте используется упор 15, контактирующий с ребордой ходового колеса 3.
Перед контролем положения ходовых колес 3 устройства 1 и 2 настраивают на эталонной вертикальной плоскости, в роли которой может быть использована боковая поверхность контрольного куба или вертикальная плоскость направляющей точного станка. При настройке устройства 1 и 2 располагают на одной высоте, корпуса 6 выравнивают в горизонтальной плоскости по уровням 11, а уровнями 12 контролируют вертикальное положение корпусов 6. Затем включают лазеры 13 и перемещением мишеней 14 добиваются совпадения луча лазера с осью соответствующей мишени.
При контроле положения ходовых колес 3 устройства 1 и 2 с помощью магнитов 10 закрепляют на базовых боковых поверхностях ходовых колес, расположенных с одной из боковых сторон рамы 4. Для установки устройств 1 и 2 на одной высоте добиваются контакта упоров 15 с ребордами колес 3. Корпуса 6 выравнивают в горизонтальной плоскости по уровням 11 за счет смещения самих корпусов 6 или поворотом колес 3, вывешенных на домкратах. Затем включают лазеры 13 и регистрируют положение их лучей на мишенях 14, при этом смещение луча по горизонтальной оси мишени характеризует перекос ходового колеса 3 относительно направления перемещения подъемно-транспортной машины, а по вертикальной оси - отклонение рельсов 5 кранового пути от горизонтали. Показания уровней 12 характеризуют перекос ходовых колес 3 в вертикальной плоскости. По полученным показаниям рассчитывают фактические углы перекоса колес в продольном и вертикальном направлениях и размеры компенсирующих элементов, посредством которых производится выверка. Если в конструкции ходовых колес 3 предусмотрены регулировочные устройства, позволяющие производить их выверку, то правильного положения ходовых колес добиваются поворотом регулировочных устройств, непрерывно контролируя смещение лучей лазеров 13 и показания уровней 12. Правильность выверки ходовых колес 3 характеризует нахождение лучей лазеров 13 на вертикальных осях мишеней 14 и нулевое показание уровней 11 и 12.
Таким образом, предлагаемое устройство для контроля положения ходовых колес отличается конструктивной простотой и компактностью, что позволяет эффективно использовать его при ремонте подъемно-транспортных машин в стесненных условиях действующих производств, в т.ч. и при расположении крановых путей на высоте.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ХОДОВЫХ КОЛЕС ПОДЪЕМНО-ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2412105C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ОТКЛОНЕНИЯ ХОДОВОГО КОЛЕСА КРАНА ОТ ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 1996 |
|
RU2121963C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ХОДОВЫХ КОЛЕС ПОДЪЕМНО-ТРАНСПОРТНЫХ СРЕДСТВ | 1993 |
|
RU2083468C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЗАИМНОГО ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЭЛЕМЕНТОВ МЕХАНИЧЕСКОЙ ПЕРЕДАЧИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2531031C2 |
| Приспособление для выверки колес мостового крана | 1973 |
|
SU485058A2 |
| Устройство для контроля параллельности базовых струн при выверке крановых колес | 1975 |
|
SU686976A1 |
| ТРАНСПОРТНО-ЗАРЯЖАЮЩАЯ МАШИНА | 2000 |
|
RU2194234C2 |
| Способ выверки ходовых колес крана | 1988 |
|
SU1699891A1 |
| Устройство для контроля положения ходовых колес рельсового транспортного средства | 1985 |
|
SU1244076A1 |
| Мостовой кран | 1990 |
|
SU1744046A1 |
Изобретение относится к подъемно-транспортному машиностроению, в частности к средствам контроля положения ходовых колес рельсовых подъемно-транспортных машин. Устройство для контроля положения ходовых колес содержит корпус с базовыми опорами и размещенным на нем уровнем горизонтального положения, соединенный с ходовым колесом, устройство задания оптической оси, закрепленное на корпусе и оптически взаимодействующее с мишенью. Корпус выполнен в виде кронштейна с базовой и перпендикулярными ей горизонтальными и вертикальными поверхностями. Базовая поверхность корпуса взаимодействует посредством боковых опор с боковой поверхностью ходового колеса. На вертикальной поверхности закреплены устройство задания оптической оси и мишень, а на горизонтальной поверхности размещены уровень горизонтального положения и перпендикулярно ему уровень вертикального положения корпуса. Достигается упрощение конструкции и уменьшение размеров устройства, а также расширение его эксплуатационных возможностей. 3 з.п. ф-лы, 4 ил.
1. Устройство для контроля положения ходовых колес рельсовых подъемно-транспортных машин, содержащее корпус с базовыми опорами и размещенным на нем уровнем горизонтального положения, соединенный с ходовым колесом, устройство задания оптической оси, закрепленное на корпусе и оптически взаимодействующее с мишенью, отличающееся тем, что корпус выполнен в виде кронштейна с базовой и перпендикулярными ей горизонтальными и вертикальными поверхностями, при этом базовая поверхность корпуса взаимодействует посредством базовых опор с боковой поверхностью ходового колеса, на вертикальной поверхности закреплены устройство задания оптической оси и мишень, а на горизонтальной поверхности размещены уровень горизонтального положения и перпендикулярно ему уровень вертикального положения корпуса.
2. Устройство по п.1, отличающееся тем, что в качестве базовых опор применены магниты.
3. Устройство по п.1 или 2, отличающееся тем, что в качестве устройства задания оптической оси применен лазер.
4. Устройство по любому из пп.1-3, отличающееся тем, что мишень выполнена с возможностью смещения по вертикали и горизонтали.
| Устройство для контроля параллельности базовых струн при выверке крановых колес | 1975 |
|
SU686976A1 |
| Устройство для контроля отклонений положения ходовых колес от вертикальной плоскости | 1976 |
|
SU624869A2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ХОДОВЫХ КОЛЕС ПОДЪЕМНО-ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2235679C2 |
| DE 4036168 A1, 21.05.1992 | |||
| ПРЕПАРАТ ДЛЯ ЛЕЧЕНИЯ ГНОЙНЫХ РАН НА ФОНЕ САХАРНОГО ДИАБЕТА | 1995 |
|
RU2112548C1 |

