Изобретение относится к области систем автоматического управления объектами широкого класса с неизвестными, медленно изменяющимися параметрами (дрейфе параметров) и неизвестными ограниченными внешними возмущениями.
Известны системы адаптивного управления.
Системы [1], [2] не достигают цели, когда внешние возмущения, действующие на объект, неизвестны. В системе [3] предполагается, что измеряются все переменные состояния объекта. Системы [4]-[5] могут терять устойчивость при дрейфе параметров объекта.
Наиболее близкой к предлагаемой является адаптивная система [5], которая содержит регулятор, соединенный со входом объекта управления, выход объекта управления соединен входом идентификатора, чей выход соединен с входом синтезатора, выход которого соединен с регулятором, на другой вход которого через сумматор поступают вход объекта и выход генератора испытательного сигнала.
Недостатком этой системы является то, что она может терять устойчивость из-за длительной идентификации, которая может оказаться более медленной, чем дрейф объекта.
Целью изобретения является обеспечение устойчивости адаптивной системы при дрейфе параметров объекта.
Поставленная цель достигается тем, что заявляемая частотная адаптивная система дополнена блоком настройки параметров генератора испытательного сигнала, что уменьшает время идентификации объекта, обеспечивая устойчивую работу системы.
Изобретение поясняется чертежом, на котором изображена структурная схема частотной адаптивной системы.
Адаптивная система содержит настраиваемый регулятор 1, соединенный со входом объекта управления 2, выход объекта управления соединен с входом идентификатора 3, чей выход соединен с синтезатором 4, выход которого соединен с регулятором 1, на другой вход регулятора через сумматор 5 поступают выход объекта 2 и выход генератора испытательного сигнала 6, чей вход соединен с выходом блока настройки 7.
Система работает следующим образом. На вход объекта 2 поступает сигнал с регулятора 1, настраиваемого синтезатором, в котором вычисляются коэффициенты регулятора 1, используя оценки коэффициентов объекта, получаемые идентификатором 3. Для работы идентификатора необходим испытательный сигнал, который является суммой n гармоник, формируемых генератором 6 (амплитуды гармоник этого сигнала таковы, что компонента выхода объекта, вызванная этим сигналом, меньше компоненты, зависящей от внешнего возмущения). Испытательный сигнал и сигнал выхода объекта складываются сумматором 5 и результат подается на второй вход регулятора и таким образом испытательный сигнал, пройдя через объект, поступает в идентификатор 3. Эффективность работы идентификатора (длительность идентификации при необходимой точности идентификации) существенно зависит от частот испытательного сигнала. Эти частоты определяются блоком настройки 7, который изменяет частоты испытательного сигнала, обеспечивая их границы близкими к границам собственных частот объекта, которые изменяются при его дрейфе. Это позволяет существенно сократить время идентификации, что и обеспечивает устойчивую работу системы.
Опишем реальный алгоритм работы адаптивной системы с частотным идентификатором, реализованный (без блока 7) в [4], [5] с помощью языка С на IBM-совместимом компьютере с платой расширения L-780, содержащей аналого-цифровой и цифроаналоговый преобразователи, а затем опишем блок 7.
Регулятор 1 описывается следующим уравнением с кусочно-постоянными коэффициентами

где y(k) - измеряемый в момент hk (k=1, 2 …) выход объекта, h - интервал дискретности измерений, u(k) - выход регулятора, i (i=1, 2…) - номер интервала адаптации регулятора, ki (i=1, 2…) - моменты изменения коэффициентов регулятора(эти моменты могут задаваться либо определяться в процессе адаптации), υ[i](k) - испытательный сигнал, который имеет вид

Испытательный сигнал формируется генератором 6.
Асимптотически устойчивый объект 2 описывается уравнением с кусочно-постоянными коэффициентами

где f(k) - неизмеряемое неизвестное ограниченное внешнее возмущение: |f(k)|≤f*, (k=1, 2…), f* - заданное число, 
 - неизвестные числа, аппроксимирующие дрейф параметров объекта.
- неизвестные числа, аппроксимирующие дрейф параметров объекта.
Предполагается, что на первом интервале коэффициенты объекта и регулятора известны.
Идентификатор 3 содержит:
а) фильтр Фурье
б) вычислитель частотных параметров объекта
где  - частотная характеристика регулятора (1), которая находится по его передаточной функции
- частотная характеристика регулятора (1), которая находится по его передаточной функции

в) решатель частотных уравнений
дает оценки  и
и 
 искомых коэффициентов объекта i-том интервале.
искомых коэффициентов объекта i-том интервале.
Синтезатор 4 находит коэффициенты регулятора путем минимизации функционала

где  y* - допустимая ошибка регулирования (|y(t)|≤y*), εr (r=1,…ψ) - заданные достаточно малые числа.
y* - допустимая ошибка регулирования (|y(t)|≤y*), εr (r=1,…ψ) - заданные достаточно малые числа.
Синтезатор находит коэффициенты для (i+1)-го интервала работы регулятора, используя коэффициенты объекта, идентифицированного на i-том интервале.
Блок настройки 7 служит для определения амплитуд  и частот
и частот  испытательного сигнала для (i+1)-го интервала адаптации.
испытательного сигнала для (i+1)-го интервала адаптации.
Для нахождения испытательных частот он осуществляет три операции.
Операция 1. (Определение границ диапазона испытательных частот)
Нижняя  и верхняя границы
и верхняя границы  находятся как первый и последний изломы ЛАЧХ оценки частотной передаточной функции объекта (3), полученной на i-том интервале
находятся как первый и последний изломы ЛАЧХ оценки частотной передаточной функции объекта (3), полученной на i-том интервале

где

Операция 2. (Определение испытательных частот для i+1-го интервала)

Операция 3. (Формирование кратных испытательных частот для i+1-го интервала)
Частоты (11) корректируются так, чтобы период частоты  был кратен h, а остальные частоты были кратны полученной частоте и тогда полагают
был кратен h, а остальные частоты были кратны полученной частоте и тогда полагают

где  , (квадратные скобки означают целую меньшую часть числа).
, (квадратные скобки означают целую меньшую часть числа).
Таким образом, получим окончательно

где lq
 - целые числа.
- целые числа.
Используя частотную передаточную функцию (9) находят амплитуды испытательного сигнала 
 при которых составляющая выхода объекта y(t) на (i+1) интервале, зависящая от испытательного сигнала, удовлетворяет заданным требованиям.
при которых составляющая выхода объекта y(t) на (i+1) интервале, зависящая от испытательного сигнала, удовлетворяет заданным требованиям.
Таким образом, блок настройки изменяет частоты испытательного сигнала, обеспечивая их границы, близкими к границам собственных частот, изменяющиеся при его дрейфе. Это позволяет существенно сократить время идентификации, что и обеспечивает устойчивую работу системы.
Источники информации
1. Патент РФ RU(11)2068196, кл. G05B 13/02, 1996.
2. Патент РФ RU(11)2109317, кл. G05B 13/02, 1998.
3. Патент РФ RU(11)2191419, кл.С05В 13/04, 2002.
4. Александров А.Г., Кариков Д.Г., Курицина Е.Ю. Частотный адаптивный регулятор с заданным интервалом дискретности Труды международной конференции ИДЕНТИФИКАЦИЯ СИСТЕМ И ЗАДАЧИ УПРАВЛЕНИЯ. Москва, 2007, ИПУ. CD-ROM, ISВН 5-201-14992-8, стр.655-668.
5. Alexandrov A.G., D.Khomutov "Frequency adaptive controller: experimental investigation". Proceedings of the Tenth IASTED International Conference May 26-28, 2008. Quebec City, Quebec, Canada, ISBN 978-0-88986-746-8. p.96-101.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2015 |
|
RU2612340C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ПИД-РЕГУЛЯТОР | 2009 |
|
RU2419122C2 |
| Адаптивная электрогидравлическая следящая система с модулированной осцилляцией | 2016 |
|
RU2627956C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И ЭТАЛОННОЙ МОДЕЛЬЮ | 2001 |
|
RU2191419C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ДВУХЭТАПНЫМ ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 2002 |
|
RU2231819C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ ПРИ ВРЕМЕННЫХ ЗАДЕРЖКАХ ИНФОРМАЦИИ В СИСТЕМЕ УПРАВЛЕНИЯ | 2001 |
|
RU2192031C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ДВУХЭТАПНЫМ ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 2004 |
|
RU2258951C1 |
| Способ автоматической настройки ПИД-регулятора для управления дизельным двигателем в составе электроагрегатов и электростанций | 2016 |
|
RU2653938C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2339988C1 |
| Способ адаптивного управления плохо формализуемым объектом | 2016 |
|
RU2612084C1 |
Изобретение относится к области систем автоматического управления объектами широкого класса с неизвестными, медленно изменяющимися параметрами и неизвестными ограниченными внешними возмущениями. Техническим результатом является обеспечение устойчивости адаптивной системы при дрейфе параметров объекта. Он достигается путем настройки генератора испытательного сигнала, обеспечивая границы его частот близкими к границам собственных частот объекта. Это позволяет существенно сократить время идентификации, что обеспечивает устойчивую работу системы. Для этого система дополняется блоком настройки параметров генератора. 1 ил.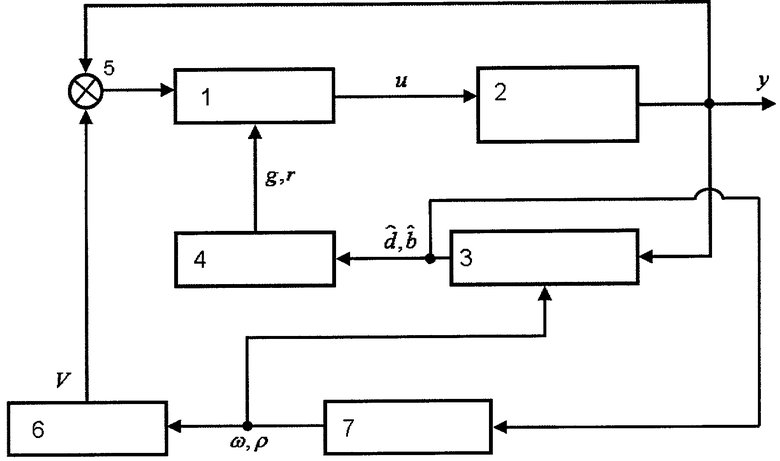
Частотная адаптивная система управления, содержащая регулятор, соединенный выходом со входом объекта управления, выход которого подключен к первому входу идентификатора коэффициентов объекта управления, выход идентификатора соединен с входом синтезатора, выход которого соединен с первым входом регулятора, второй вход которого соединен с выходом сумматора, входы которого подключены соответственно к выходу объекта управления и к выходу генератора испытательного сигнала, отличающаяся тем, что в систему введен блок настройки амплитуд и частот генератора испытательного сигнала, вход которого соединен с выходом идентификатора коэффициентов объекта управления, а выход - с входом генератора испытательного сигнала и вторым входом идентификатора коэффициентов объекта управления.
| Alexandrov A.G., Khomutov D | |||
| Frequency adaptive controller: experimental investigation | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| RU 2003160 C1, 15.11.1993 | |||
| Устройство для контроля линейного объекта управления | 1989 |
|
SU1753454A1 |
| JP 2005202537 A, 28.07.2005. | |||

