Способ и устройство относятся к транспортным гусеничным машинам, а именно к гусеничным механизмам танков.
Известен способ уравновешивания силы тяжести холостой ветви гусеничной цепи танка поддерживающими катками, которые создают вертикальную силу реакции, уравновешивающую силу тяжести холостой ветви гусеничной цепи [Конструкция и расчет танков. Изд-во академии бронетанковых войск. - М.: 1973. - 602 с., автор С.С.Буров, с.577].
Известно устройство для осуществления данного способа, представляющее собой холостую ветвь гусеничной цепи, поддерживающие катки, направляющее колесо, механизм натяжения гусениц [Конструкция и расчет танков. Изд-во академии бронетанковых войск. - М.: 1973. - 602 с., автор С.С.Буров, с.577].
Недостатком данного способа и устройства являются установка поддерживающих катков на корпусе танка на одной высоте от опорной поверхности, т.е. в горизонтальной плоскости. В результате этого между поддерживающими катками происходит провес гусеничной цепи и вследствие этого при увеличении скорости движения танка возрастают сопротивления движению холостой ветви гусеничной цепи по поддерживающим каткам.
Задачей способа и устройства по данному изобретению является преобразование статического способа уравновешивания силы тяжести холостой ветви гусеничной цепи танка в динамическое уравновешивание сил тяжести центробежной силой инерции и создание устройства, обеспечивающего снижение сил сопротивления при движении холостой ветви гусеничной цепи по поддерживающим каткам.
Поставленная задача в части способа решена за счет того, что в известном способе статического уравновешивания силы тяжести холостой ветви гусеничной цепи осуществляется динамическое уравновешивание указанных сил тяжести центробежными силами путем выполнения операции предварительного натяжения холостой ветви гусеничной цепи натяжным механизмом, создание выпуклой вверх криволинейной траектории движения холостой ветви гусеничной цепи, формирование центробежных сил инерции в холостой ветви гусеничной цепи при движении танка, уравновешивание силы тяжести холостой ветви гусеничной цепи танка центробежными силами, пропорциональными квадрату скорости движения танка.
Поставленная задача в части устройства решена за счет того, что в известном устройстве уравновешивания силы тяжести холостой ветви гусеничной цепи танка, содержащем гусеничную цепь, поддерживающие катки, направляющее колесо с натяжным механизмом, согласно изобретению поддерживающие катки холостой ветви гусеничной цепи установлены на корпусе танка в вертикальной плоскости по дуге окружности с возможностью регулирования предварительного натяжения гусениц направляющим колесом.
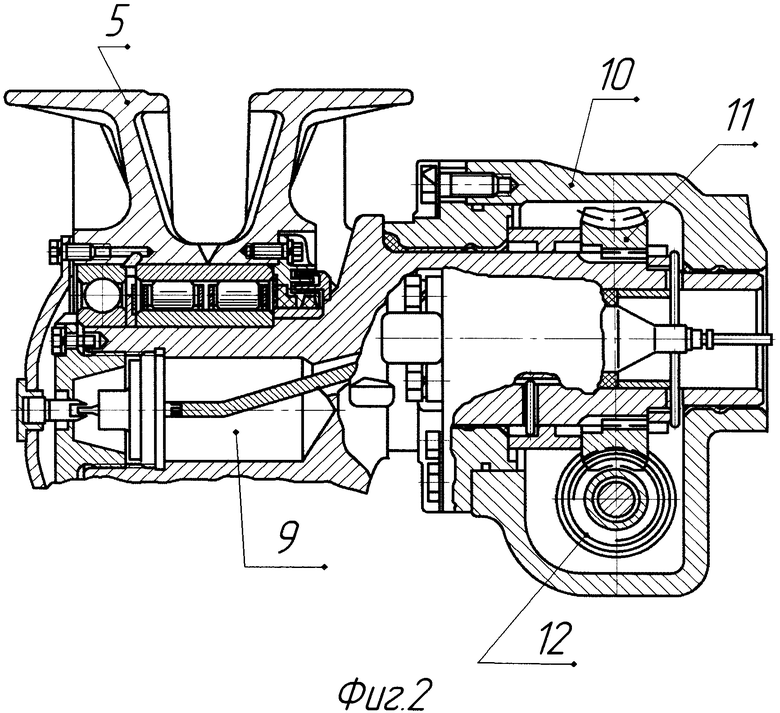
Сущность работы способа и устройства поясняется чертежами, где на фиг.1 показана схема способа и техническая реализация устройства, на фиг.2 показан механизм натяжения гусениц направляющим колесом.
Способ и устройство для его реализации содержат корпус 1 танка, ведущее колесо 2, гусеничную цепь 3, опорные катки 4, направляющее колесо 5, поддерживающие катки 6, 7, 8, кривошип 9 механизма натяжения гусеницы (фиг.2), кронштейн 10, колесо червячное 11, червяк 12.
Сущность работы способа по фиг.1 состоит в том, что холостая ветвь гусеничной цепи танка выполнена по дуге окружности радиуса R, являющейся касательной к ведущему колесу 2 и направляющему колесу 5.
Точки контакта В, С, D гусеницы с опорными катками и точки А, Е лежат на дуге окружности радиуса R.
Точка О на фиг.1 - мгновенный центр радиуса кривизны траектории холостой ветви гусеничной цепи. Угол α - половинный угол хорды L дуги окружности ABCDE.
При движении траков гусеничной цепи по криволинейной траектории радиуса R возникают центробежные силы инерции, которые уравновешивают силу тяжести холостой ветви гусеничной цепи, при этом предварительное натяжение гусениц обеспечивается перемещением направляющего колеса 5 относительно рамы танка.
Хорда L дуги окружности, ее радиус R и стрела h связаны приближенным выражением
 ,
,
где L - хорда дуги окружности; h - стрела дуги окружности.
Результат динамического уравновешивания силы тяжести холостой ветви гусеничной цепи удобно оценивать сравнением величины центробежного ускорения гусеницы aЦ с ускорением свободного падения тел в гравитационном поле Земли. Центробежное ускорение траков холостой ветви гусеничной цепи при движении по криволинейной траектории радиуса R определяется по формуле
 ,
,
где V - скорость танка.
Для примера при скорости движения V=72 км/ч = 20 м/с, для радиуса R=35 м имеем aЦ=11,4 м/с2. Это означает, что предложенный способ позволяет полностью уравновесить силу тяжести холостой ветви гусеничной цепи. Условие уравновешивания имеет вид
Устройство уравновешивания сил тяжести холостой ветви гусеничной цепи работает следующим образом.
Нормальная работа гусеничного механизма возможна при условии предварительного натяжения гусениц.
Натяжение гусениц осуществляют вращением червяка 12, который взаимодействует с колесом червячка 11, поворачивает кривошип 9 и перемещает направляющее колесо 5 вперед по ходу движения (фиг.1), осуществляя натяжение гусеницы.
При движении траков холостой ветви гусеничной цепи по криволинейной траектории, образованной поддерживающими катками, возникают центробежные ускорения и появляются центробежные силы инерции, которые уравновешивают силу тяжести звеньев холостой ветви гусеничной цепи. При некоторой скорости движения танка происходит полное уравновешивание сил тяжести холостой ветви гусеничной цепи. Вследствие уравновешивания сил тяжести снижаются сопротивления перекатыванию холостой ветви гусеничной цепи, происходит снижение потерь мощности в гусеницах танка, повышается долговечность гусениц.
Изобретения относятся к области транспортного машиностроения, в частности к способу динамического уравновешивания силы тяжести холостой ветви гусеничной цепи танка и устройству уравновешивания силы тяжести холостой ветви гусеничной цепи танка. Способ динамического уравновешивания силы тяжести холостой ветви гусеничной цепи танка включает операцию предварительного натяжения холостой ветви направляющим колесом, создание выпуклой вверх криволинейной траектории движения холостой ветви, формирование центробежных сил инерции, уравновешивание силы тяжести холостой ветви центробежной силой инерции, пропорциональной квадрату скорости движения танка. Устройство уравновешивания силы тяжести холостой ветви гусеничной цепи танка содержит гусеничную цепь, поддерживающие катки, направляющее колесо, натяжной механизм. Поддерживающие катки холостой ветви гусеничной цепи установлены на корпусе танка в вертикальной плоскости по дуге окружности с возможностью регулирования предварительного натяжения гусеницы направляющим колесом. Достигается снижение сил сопротивления перекатыванию холостой ветви гусеничной цепи. 2 н.з. ф-лы, 2 ил.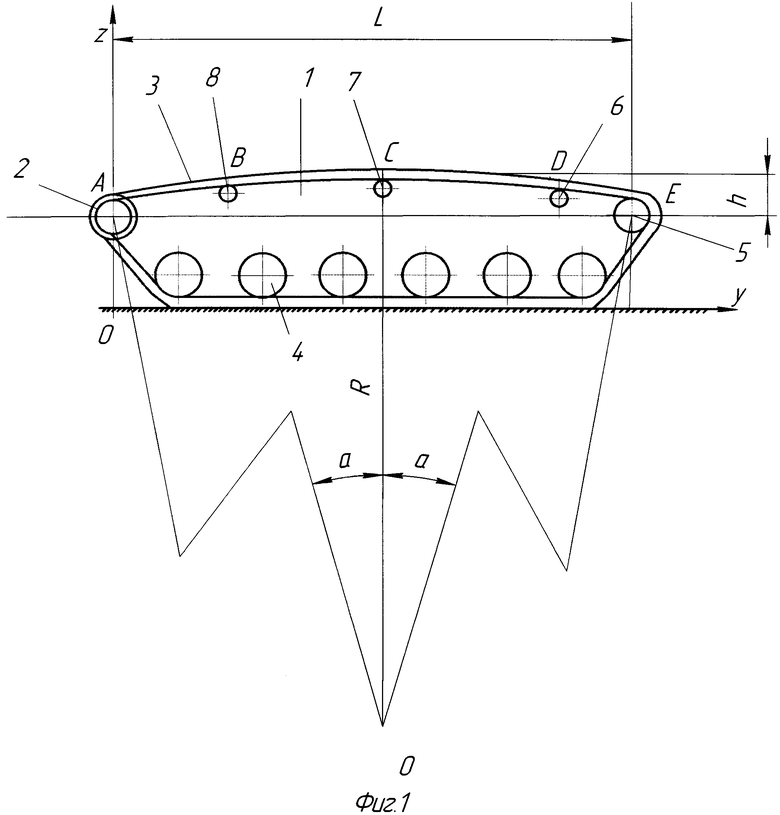
1. Способ динамического уравновешивания силы тяжести холостой ветви гусеничной цепи танка, включающий операцию предварительного натяжения холостой ветви гусеничной цепи направляющим колесом, создание выпуклой вверх криволинейной траектории движения холостой ветви гусеничной цепи, формирование центробежных сил инерции, уравновешивание силы тяжести холостой ветви гусеничной цепи танка центробежной силой инерции пропорциональной квадрату скорости движения танка.
2. Устройство уравновешивания силы тяжести холостой ветви гусеничной цепи танка, содержащее гусеничную цепь, поддерживающие катки, направляющее колесо, натяжной механизм, отличающееся тем, что поддерживающие катки холостой ветви гусеничной цепи установлены на корпусе танка в вертикальной плоскости по дуге окружности с возможностью регулирования предварительного натяжения гусеницы направляющим колесом.
| Коловратный насос с вращающимися направляющим диском и цилиндрами, могущий служить двигателем | 1927 |
|
SU6177A1 |
| CN 201169309 Y, 24.12.2008 | |||
| Ходовая система транспортного средства | 1989 |
|
SU1646941A1 |
| Ходовая система транспортного средства | 1987 |
|
SU1428652A1 |

