Изобретение относится к области измерительной техники и может быть использовано при вычислении углов рассогласования систем координат - юстировочных углов - между бесплатформенной инерциальной системой ориентации (далее по тексту БИСО или система) и объектом, на который она устанавливается.
Определение юстировочных углов осуществляется на основе анализа известных параметров ориентации объекта и БИСО без применения специальной измерительной аппаратуры, устанавливаемой на БИСО. В основе способа лежит сопоставление параметров угловой ориентации объекта по углам курса и тангажа с аналогичными параметрами, измеренными БИСО в как минимум двух заданных контрольных положениях. Первое контрольное положение выбирается в плоскости горизонта. Второе - на большом угле тангажа объекта, когда ошибки в рассогласовании систем координат объекта и БИСО наиболее наблюдаемы.
Решение задачи юстировки предложенным способом позволяет при помощи БИСО определять пространственное положение объекта с точностью, близкой к потенциально возможной для систем данного класса точности.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Недостатком известных способов юстировки является необходимость применения для их реализации громоздкой нестандартной измерительной аппаратуры, которую необходимо устанавливать на объекте и БИСО специально только для юстировочных операций. Сам процесс юстировки в этом случае занимает достаточно длительное время, а точность определения юстировочных углов в большей степени зависит от навыков оператора.
Юстировка производится за счет математических вычислений, производимых на основе данных, полученных от БИСО, в как минимум двух контрольных положениях. Одно из таких контрольных положений находится в плоскости горизонта, а второе на большом угле тангажа объекта, когда ошибки в рассогласовании систем координат объекта и БИСО наиболее наблюдаемы.
Техническим результатом изобретения является повышение точности юстировки БИСО относительно строительных осей объекта, на который она устанавливается, что обеспечивает вычисление параметров ориентации объекта с точностью, близкой к потенциально возможной для систем данного класса точности.
При установке БИСО на объект с целью определения его пространственной ориентации возникала необходимость определения углов рассогласования между их системами координат. Вызвано данное рассогласование несовпадением строительных осей объекта и измерительных осей БИСО, расположенной на его установочной площадке, по причине неточного взаимного размещения. Неточность установки БИСО на объекте может привести к существенным погрешностям в определении угловой ориентации объекта. Привести угловые измерения БИСО в соответствие с действительной ориентацией объекта с высокой точностью возможно путем введения в вычислительные алгоритмы БИСО корректировочных параметров, определяющих рассогласование систем координат. Такое рассогласование может быть определено тремя углами - αх, αу, αz, называемыми юстировочными углами (см. приложение 1). Процесс определения юстировочных углов будем называть юстировкой.
Для математического обоснования способа юстировки введем следующие системы координат:
- Система координат связанная с БИСО: OXП,YП,ZП. Ориентацию ее измерительных осей зададим следующим образом: ось ОХП - продольная ось системы, OYП - вертикальная ось, перпендикулярная основанию системы; OZП - поперечная ось системы.
- Система координат связанная с объектом: OXT, YТ, ZТ. Оси этой системы координат определим следующим образом: ось ОХТ - продольная ось объекта, OYТ - вертикальная ось, перпендикулярная установочной площадке объекта; OZT - поперечная ось.
Ориентация систем координат в пространстве задается тремя углами: углом тангажа (ϑ) - угол между продольной осью объекта и горизонтальной плоскостью; углом крена (γ) - угол поворота объекта вокруг продольной оси; углом курса (ψ) - угол в горизонтальной плоскости, заключенный между северным направлением меридиана, принятого за начало отсчета, и проекцией продольной оси объекта на горизонтальную плоскость. За положительное направление угла курса выбран поворот в плоскости горизонта по часовой стрелке вокруг вертикальной оси объекта. Для углов тангажа и крена положительное направление принято отсчитывать против часовой стрелки вокруг поперечной и продольной осей системы соответственно.
Для того чтобы вычислить углы рассогласования систем координат между объектом и БИСО и тем самым оценить значения юстировочных углов, предлагается как минимум в двух контрольных положениях сравнить известные параметры угловой ориентации. Первое такое положение формируется в горизонтальной плоскости. Для этого объект, к строительным осям которого производится привязка измерительных осей БИСО, располагается строго в плоскости горизонта (углы тангажа и крена объекта должны быть равны нулю). Истинное значение угла крена объекта не контролируется при углах тангажа, отличных от нуля, но в плоскости горизонта значение данного параметра известно, так как оно устанавливается равным нулю.
БИСО, закрепленная на установочной площадке объекта, способна с высокой точностью определить свои углы наклона - углы тангажа и крена. В связи с этим юстировочные углы по данным каналам проще всего вычислить в горизонтальном положении, когда соответствующие углы объекта достоверно известны. Юстировочный угол по каналу крена вычисляется по следующей формуле:

где γТ - угол крена объекта, который в плоскости горизонта имеет численное значение, равное нулю, γ - угол крена, вычисленный БИСО. Таким образом, юстировочный угол αх имеет численное значение, равное значению угла крена на выходе БИСО, взятое с противоположным знаком. Формула (1) с точностью до обозначений справедлива для вычисления юстировочного угла по каналу тангажа αz

где ϑТ - угол тангажа объекта, который в плоскости горизонта имеет численное значение, равное нулю, ϑ - угол тангажа, вычисленный БИСО.
Однако, найти в горизонтальном положении юстировочный угол по каналу курса (αy) не представляется возможным по причине того, что ошибка формирования начального угла курса у БИСО в результате гирокомпасирования может достигать значительной величины, что, как правило, не соответствует требованиям к точности определения угловых координат для вычисления юстировочных углов. При этом истинный курс объекта возможно получить с высокой точностью при помощи, например, привязок на местности. Получить значение юстировочного угла по каналу курса αy предлагается с помощью второго контрольного положения, в котором угол тангажа объекта изменен с нулевого значения до значения, близкого к 90°. При выполнении поворота на такой угол тангажа курс объекта необходимо сохранить неизменным. При большом угле тангажа ошибки рассогласования систем координат между объектом и БИСО становятся наиболее наблюдаемыми, что иллюстрируется полученными ниже формульными зависимостями и графиками.
Для получения формульных зависимостей, определяющих взаимосвязь юстировочных углов и ошибок показаний БИСО в контрольных положениях, используются уравнения Эйлера, которые позволяют выразить параметры угловой ориентации БИСО (курс, крен, тангаж) через соответствующие проекции относительной угловой скорости объекта:
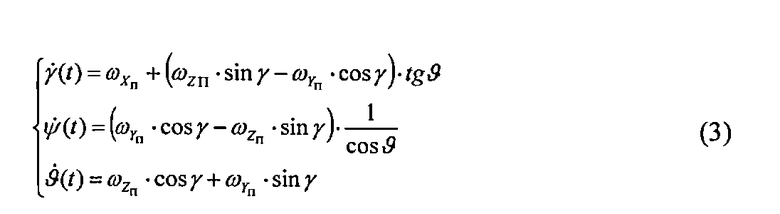
где ψ, ϑ, γ - углы курса, тангажа и крена БИСО соответственно, ωXп, ωYп, ωZп - проекции относительной угловой скорости объекта на оси системы координат, связанной с БИСО.
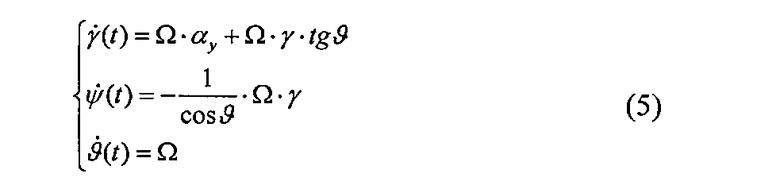
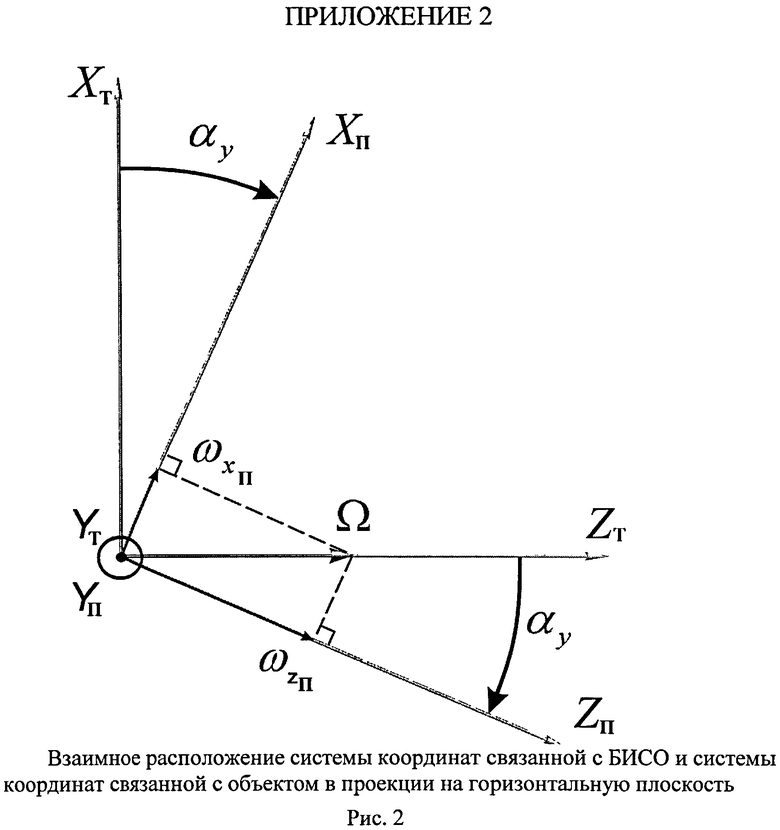
Оси ориентации БИСО и объекта, находящиеся в горизонтальной плоскости, при предположении, что юстировочные углы αх и αz близки к нулю, будут развернуты только на угол αy, что представлено на рис.2 (см. приложение 2). Поворот на угол тангажа происходит с угловой скоростью Ω вокруг оси OZТ системы координат, связанной с объектом. На основании рис.2 (см. приложение 2) проекции относительной угловой скорости объекта на оси системы координат, связанной с БИСО ωXп, ωYп, ωZп, вычисляется по следующим формулам:

В результате с учетом (4), а также в предположении, что угол крена БИСО γ - малый угол, система уравнений (3) может быть приведена к виду:
Аналитическое решение системы дифференциальных уравнений (5) со следующими начальными условиями: ϑ0=0, γ0=0, ψ0=ψт(0) имеет следующий вид:
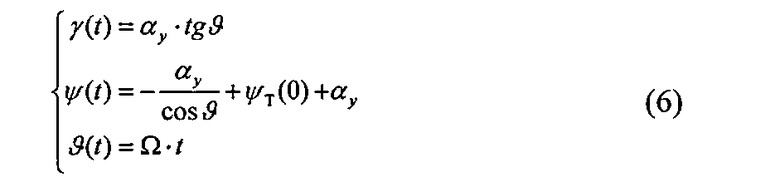
где ψ(t), γ(t), ϑ(t) - углы ориентации системы: курс, крен, тангаж соответственно; ψ0, γ0, ϑ0 - начальные углы ориентации системы: курс, крен, тангаж соответственно; ψТ(0) - начальный угол курса объекта, который сохраняется постоянным, как в плоскости горизонта, так и при увеличении угла тангажа.
Для наглядности на рис.3 (см. приложение 3) показаны графики изменения угла курса и угла крена БИСО в зависимости от угла тангажа объекта при наличии юстировочного угла по каналу курса, αy=0,06°. При анализе графиков на рис.3 (см. приложение 3) видно, что в плоскости горизонта, где угол тангажа объекта равен нулю, расхождение значений углов ориентации БИСО и объекта отсутствует. По этой причине невозможно выполнить юстировку в полном объеме, наблюдая значения углов наклона БИСО при установке объекта в плоскости горизонта. Рассогласование систем координат между объектом и БИСО по курсовому углу становится наиболее наблюдаемым на значительных углах тангажа.
На основании полученного решения (6) системы дифференциальных уравнений Эйлера (5) юстировочный угол по каналу курса αy может быть вычислен по формуле:

где Δψ=ψ(t)-ψТ(0); ψ(t) - угла курса, измеренный системой при большом угле тангажа; ψТ(0) - угол курса объекта, который не меняется в ходе юстировочных операций; ϑ - угол тангажа, на котором производится измерение.
Таким образом, в основе предлагаемого способа юстировки лежит сравнение известных углов ориентации объекта с соответствующими углами ориентации, получаемыми БИСО как минимум в двух контрольных положениях. Расчет юстировочных углов производится по разностям соответствующих углов ориентации объекта и БИСО в контрольных положениях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2723976C1 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ ДОПЛЕРОВСКОГО ИЗМЕРИТЕЛЯ СКОРОСТИ | 2015 |
|
RU2614192C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2594631C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2589495C1 |
| СПОСОБ КАЛИБРОВКИ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ | 2004 |
|
RU2269813C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КРЕНА ВРАЩАЮЩЕГОСЯ ПО КРЕНУ ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2527369C1 |
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2015 |
|
RU2617565C1 |
| СПОСОБ ВЫСТАВКИ ОСЕЙ ПОДВИЖНОГО ОБЪЕКТА | 2004 |
|
RU2320963C2 |
| Способы формирования данных об ориентации объекта и навигационный комплекс летательного аппарата для их реализации | 2020 |
|
RU2745083C1 |

Изобретение относится к области приборостроения и может найти применение в системах юстировки бесплатформенных инерциальных систем ориентации. Технический результат - повышение точности. Для этого определение котировочных углов рассогласования между измерительными осями бесплатформенной инерциальной системой ориентации и строительными осями объекта осуществляют без использования специальных измерительных приспособлений. А именно, юстировочные углы формируются на основе измерительных данных от инерциальной системы ориентации в двух контрольных положениях. 3 ил.
Способ определения юстировочных углов, определяющих рассогласование между измерительными осями бесплатформенной инерциальной системы ориентации (БИСО) и строительными осями объекта, на котором БИСО установлена, отличается тем, что при его реализации не используются специальные измерительные приспособления, устанавливаемые на БИСО, а производится сравнение известных параметров угловой ориентации БИСО и объекта, юстировочные углы находятся путем вычислений, производимых на основе измерительных данных, собранных в двух контрольных положениях, в первом положении, в плоскости горизонта, вычисляются юстировочные углы по каналам крена и тангажа, это углы αx и αz, соответственно, по величине расхождения курсовых углов БИСО и объекта, полученного во втором контрольном положении на большом угле тангажа объекта, производится вычисление юстировочного угла по каналу курса αy с использованием формулы  , где Δψ=ψ(t)-ψT(0); ψT(0) - начальный угол курса объекта, который не изменяется в ходе юстировочных операций при увеличении угла тангажа; ψ(t) - угла курса, измеренный системой при большом угле тангажа; ϑ - значение угла тангажа во втором контрольном положении.
, где Δψ=ψ(t)-ψT(0); ψT(0) - начальный угол курса объекта, который не изменяется в ходе юстировочных операций при увеличении угла тангажа; ψ(t) - угла курса, измеренный системой при большом угле тангажа; ϑ - значение угла тангажа во втором контрольном положении.
| СПОСОБ КАЛИБРОВКИ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ | 2009 |
|
RU2406973C2 |
| RU 98112966 A, 20.04.2000 | |||
| СПОСОБ КАЛИБРОВКИ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334947C1 |
| СПОСОБ КАЛИБРОВКИ ГИРОСКОПОВ | 1997 |
|
RU2121134C1 |
| RU 2059205 С1, 27.04.1996 | |||
| Теория, проектирование и испытания гироскопов / РИГЛИ У | |||
| и др | |||
| - М.: Мир, 1972, с | |||
| Прибор для сжигания нефти | 1921 |
|
SU369A1 |

