Изобретение относится к планировочным машинам, используемым при планировке земляной поверхности, например, в мелиорации или при строительстве автомобильных и железных дорог, взлетно-посадочных полос аэродромов и других объектов.
Известно устройство [1] для регулирования планирующей способности планировочных машин в процессе их рабочего передвижения. Оно имеет переднюю и заднюю рамы планировщика, соединенные шарниром и гидроцилиндром, замыкающим этот шарнир при неработающей системе автоматического или ручного управления. На задней раме жестко установлен корпус датчика угла наклона, движок потенциометрического датчика взаимного углового положения рам и задатчик угла наклона задней рамы. Гидроцилиндр питается рабочей жидкостью через электроуправляемый гидравлический золотник, включение которого производится сигналом, поступающим с блока управления.
Сигнал с датчика взаимного углового положения передней и задней рам поступает на вход блока сравнения через блок настройки. На второй вход блока сравнения поступает сигнал с датчика углового положения задней рамы. На третий вход блока сравнения подается сигнал с задатчика угла, с помощью которого задается требуемый угол наклона к горизонту задней рамы планировщика. С выхода блока настройки сигнал поступает на вход блока управления.
Недостатком такого устройства является неопределенность величины коэффициента пропорциональности измеряемого угла взаимного положения передней и задней рам, который формируется в блоке настройки. Обычно этот коэффициент задается оператором вручную на основании своих субъективных ощущений. Такая неопределенность не позволяет быть уверенным, что выдерживается наибольшая допустимая планирующая способность планировщика, сохраняя при этом его свойства фильтра нижних частот.
Планировщики рассматриваемого типа, т.е. планировщики с бескопирной системой автоматического управления, обладают свойствами фильтра нижних частот. Давно известно, что если разложить реальный профиль земляного полотна в ряд Фурье и затем сгруппировать неровности, то получим приблизительно:
- низкие частоты - макропрофиль с длиной волны от 50 до 100 м и более;
- средние частоты - микропрофиль с длиной волны от 10 см до 50 м;
- высокие частоты - шероховатость с длиной волны до 10 см.
Наибольшую опасность для движущегося транспорта представляет микропрофиль. Шероховатость полезна для сцепления шины с дорожным покрытием, к тому же эти неровности сглаживаются шинами, а сглаживать макропрофиль нецелесообразно, поскольку он не вызывает заметных колебаний автомобиля на подвеске, но заметно влияет только на режим работы двигателя и трансмиссии. Сглаживание микропрофиля как раз и осуществляют планировочные машины, обладающие свойством нижних частот - они пропускают практически без изменения низкие частоты и сглаживают высокие.
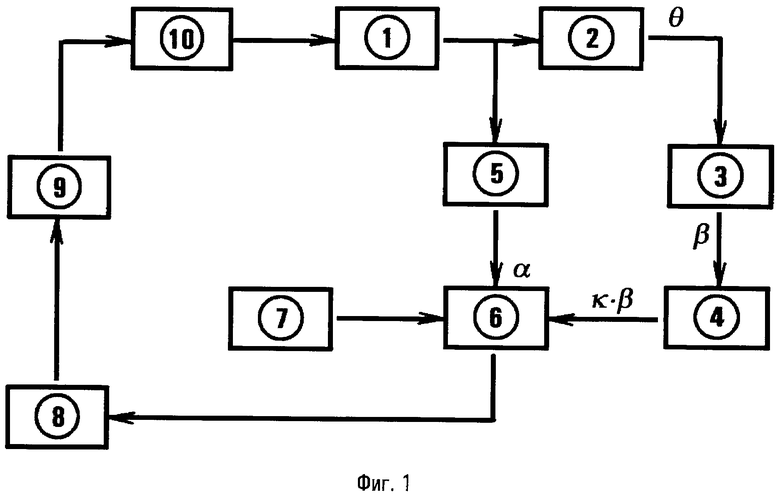
Цель предлагаемого изобретения - устройство для упразднения отмеченной неопределенности величины коэффициента пропорциональности измеряемого угла взаимного положения между передней и задней рамами. Это достигается тем, что устройство для регулирования планирующей способности (фиг.1) (в дальнейшем просто «устройство») снабжено специальным вычислительным блоком 3, вход которого соединен с выходом датчика углового положения 2 между передней и задней рамами, а сигнал с выхода подается на вход регулируемого масштабного блока 4, после которого поступает на первый вход элемента сравнения 6. Сигнал на выходе из специального вычислительного блока β - это сигнал на его входе θ, умноженный на отношение расстояния от шарнира до режущей кромки рабочего органа к расстоянию от задней опоры до шарнира. На два других его входа подаются сигнал с выхода датчика угла наклона задней рамы относительно горизонта 5 и сигнал задатчика угла 7. Выходной сигнал с элемента сравнения 6 подается на вход блока управления 8, сигнал на выходе которого включает электроуправляемый гидрозолотник 9, а тот в свою очередь подает рабочую жидкость в гидроцилиндр 10, который меняет положение режущей кромки рабочего органа планировочной машины 1.
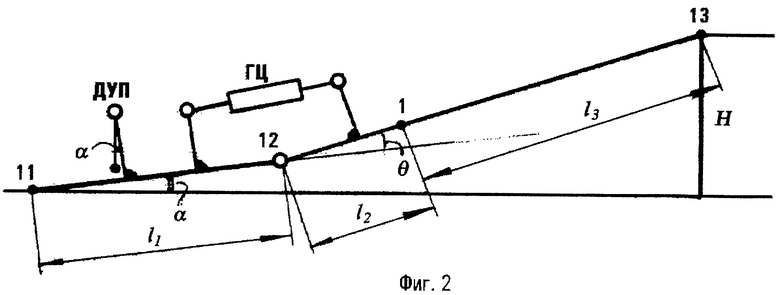
Поясним особенности работы предлагаемого устройства. На фиг.2 изображена максимально упрощенная схема планировочной машины. Точка 11 - задняя опора планировочной машины; точка 12 - шарнир, соединяющий заднюю и переднюю рамы машины; точка 1 - днообразующая режущая кромка рабочего органа; точка 13 - передняя опора планировщика, поднявшаяся на ступенчатую неровность высотой Н. На задней раме установлен маятниковый датчик углового положения ДУП (на фиг.1 поз.5). Обе рамы соединены гидроцилиндром ГЦ (на фиг.1 поз.10).
На фиг.2 показано промежуточное положение планировочной машины. Угол α - наклон задней рамы к горизонту; θ - угол между передней и задней рамами. Соответственно l1, l2 и l3 - конструктивные размеры планировочной машины.
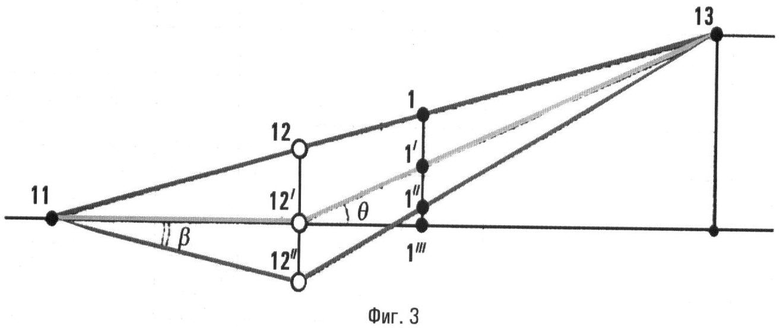
Если передняя опора 13 получает возмущение Н, то днообразующая режущая кромка рабочего органа 1 получит возмущение h1 (высота режущей кромки рабочего органа от горизонтальной плоскости профиля), равное отрезку 1-1''' (фиг.3). При горизонтировании задней рамы (α=0) возмущение h1 уменьшится и станет равным h2 (отрезок 1'-1'''). Предлагаемое устройство позволяет еще больше уменьшить h2, до величины отрезка 1''-1''', и таким образом обеспечить максимально возможное увеличение планирующей способности машины, сохраняя при этом все ее свойства фильтра низких частот.
Достигается это следующим образом. Опустив точку 12' дополнительно вниз до положения 12'', так чтобы отрезок 12-12'' был равным отрезку 1'-1'', и соединив точку 12'' с передней опорой планировщика, точкой 13, получим уменьшенное возмущение режущей кромки рабочего органа h3, равное отрезку 1''-1'''.
Следует подчеркнуть, что h3 при выполнении упомянутой процедуры становится минимальным, но не равным нулю, что обеспечивает сохранение планировщиком свойств фильтра нижних частот при любом соотношении l2/l1, кроме равенства его нулю (перемещение точки 1 в шарнир 12). На практике стремятся поместить режущую кромку рабочего органа ближе к шарниру 12, но не помещая его в самом шарнире. С учетом конструктивных ограничений соотношение l2/l1 обычно составляет 0,4-0,5.
Используя обозначения на фиг.3, приведем простейшие выкладки.
Из треугольника 12'-1'-1''' имеем:

В свою очередь из треугольника 11-12'-12'' можно определить угол β:

Из выражений (1) и (2) получим соответственно:

И, наконец, поскольку углы β и θ невелики, то sin β≅β и sin θ≅θ, окончательно получим:

Возвращаясь к фиг.1, вычислительный блок 3 реализует зависимость (4), т.е. имея на входе угол θ, на выходе получим:

В регулируемом масштабном блоке величина выходного сигнала β умножается на коэффициент K, который может меняться от единицы до нуля. При K=1 получаем максимально возможную планирующую способность машины, при которой она еще сохраняет свойства фильтра нижних частот, т.е. срезает только высокие частоты (малые длины волн неровностей, оставляя практически без изменений длинные).
Случай, когда K=0, соответствует отключению датчика 2 угла между передней и задней рамами (фиг.1) и, таким образом, горизонтированию задней рамы (α=0) с одновременным уменьшением планирующей способности машины. Сохранение свойств фильтра низких частот необходимо, чтобы обеспечить устойчивость процесса планировки (выглаживания) неровностей.
Иными словами, чтобы «не потерять» срединную поверхность продольного профиля земляного полотна. Такая опасность у рассматриваемого класса планировочных машин имеется, поскольку они не оборудуются копирным датчиком, который обеспечивает контроль высотной координаты режущей кромки рабочего органа.
Литература
1. Авторское свидетельство СССР №629288, кл. E02F 3/76, Е02F 9/20, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный планировщик | 1979 |
|
SU815172A1 |
| Землеройно-профилировочный агрегат | 1987 |
|
SU1532664A1 |
| Система автоматической стабилизации поперечного наклона рабочего органа автогрейдера | 1986 |
|
SU1481344A1 |
| Способ управления положением рабочего органа землеройной машины | 1982 |
|
SU1105576A1 |
| Полуприцепной дреноукладчик и система регулирования пространственного положения его рабочего органа | 1990 |
|
SU1789614A1 |
| Автоматический планировщик | 1983 |
|
SU1086079A1 |
| Планировщик | 1986 |
|
SU1411390A1 |
| Планировщик | 1989 |
|
SU1738932A1 |
| Планировщик | 1984 |
|
SU1344870A1 |
| СПОСОБ ПЛАНИРОВКИ ОРАШАЕМЫХ ЗЕМЕЛЬ И УСТРОЙСТВО ДЛЯ ПЛАНИРОВКИ ОРОШАЕМЫХ ЗЕМЕЛЬ | 2001 |
|
RU2240681C2 |
Изобретение относится к планировочным машинам, используемым при планировке земляной поверхности, например, в мелиорации или при строительстве автомобильных и железных дорог, взлетно-посадочных полос аэродромов и других объектов. Технический результат - упразднение неопределенности величины коэффициента пропорциональности измеряемого угла взаимного положения между передней и задней рамами. Устройство для регулирования планирующей способности планировочных машин включает датчик углового положения задней рамы, датчик угла между шарнирно связанными передней и задней рамами и задатчик угла. При этом выходы датчика угла положения задней рамы и задатчика угла через элемент сравнения и блок управления посредством электроуправляемого гидрозолотника связаны с установленным между передней и задней рамами гидроцилиндром для обеспечения изменения положения режущей кромки рабочего органа. Устройство снабжено вычислительным блоком, вход которого соединен с выходом датчика углового положения между передней и задней рамами, и регулируемым масштабным блоком, вход которого связан с выходом вычислительного блока, а выход - с элементом сравнения, причем сигнал на выходе вычислительного блока является сигналом на его входе, умноженным на отношение расстояния от шарнира между передней и задней рамами до режущей кромки рабочего органа к расстоянию от задней опоры планировочной машины до шарнира. 1 з.п. ф-лы, 3 ил.
1. Устройство для регулирования планирующей способности планировочных машин, включающее датчик углового положения задней рамы, датчик угла между шарнирно связанными передней и задней рамами и задатчик угла, при этом выходы датчика угла положения задней рамы и задатчика угла через элемент сравнения и блок управления посредством электроуправляемого гидрозолотника связаны с установленным между передней и задней рамами гидроцилиндром, для обеспечения изменения положения режущей кромки рабочего органа, отличающееся тем, что устройство снабжено вычислительным блоком, вход которого соединен с выходом датчика углового положения между передней и задней рамами, и регулируемым масштабным блоком, вход которого связан с выходом вычислительного блока, а выход - с элементом сравнения, причем сигнал на выходе вычислительного блока является сигналом на его входе, умноженный на отношение расстояния от шарнира между передней и задней рамами до режущей кромки рабочего органа к расстоянию от задней опоры планировочной машины до шарнира.
2. Устройство по п.1, отличающееся тем, что регулируемый масштабный блок имеет возможность изменять выходной сигнал путем умножения на коэффициент K, который может принимать значения от единицы до нуля.
| Устройство для регулирования планирующей способности планировочных машин | 1976 |
|
SU629288A1 |
| Устройство для измерения сверхвысокочастотной мощности | 1976 |
|
SU594462A1 |
| Автоматизированный планировщик | 1979 |
|
SU815172A1 |
| Система автоматического управления положением рабочего органа землеройной машины | 1986 |
|
SU1476081A1 |
| Система автоматического управления землеройной машины | 1987 |
|
SU1509489A1 |

