00 О5 О
1
со 2. Планировщик по п., о т л и чающийся тем, что ;.атчики угловых перемещений, выполненные в виде потенциометров, установленных на осях шарнирных соединений частей длинномерной балки и параллельно включенных в электроцепь сумматора, настроенного на вьпюлнеиис условия lU угол понорота задней части дл11Н1юмерной балки; угол ПТворота передней части длинномерной балки; длина передней части длинномерной балки междушарниром и опорным колесом, длнна средней части длинномерной балки между ее шарнирами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический планировщик | 1980 |
|
SU1051170A1 |
| Планировщик | 1979 |
|
SU829802A1 |
| Автоматический планировщик | 1986 |
|
SU1421831A1 |
| Бульдозер-планировщик | 1990 |
|
SU1758176A1 |
| Полуприцепной дреноукладчик и система регулирования пространственного положения его рабочего органа | 1990 |
|
SU1789614A1 |
| Планировочная машина | 1980 |
|
SU909028A1 |
| Прицепной планировщик | 1990 |
|
SU1789602A1 |
| Землеройно-профилировочный агрегат | 1987 |
|
SU1532664A1 |
| Машина самоходная гусеничная малогабаритная для подъема и установки бордюрного камня. | 2022 |
|
RU2785102C1 |
| ПЛАНИРОВЩИК-РАСПРЕДЕЛИТЕЛЬ С АВТОМАТИЧЕСКИМ УПРАВЛЕНИЕМ | 2008 |
|
RU2382147C1 |

1. АВТОМАТИЧЕСКИЙ ПЛАНИРОВЩИК, включающий базовую машину, сзади которой шарнирно установлен рабочий орган, длинномерную балку с опорными колесами, систему автоматического управления гидроцилиндрами подъема и опускания рабочего органа, отличающийся тем, что, с целью снижения металлоемкости и повышения надежности, длинномерная балка выполнена из трех соединен-ных горизонтальными шарнирами частей, средняя из которых одни-м шарнирно связана с рабочим органом, а другим - подвижно установлена посредством кронштейна на базовой машине, при этом горизонтальные шарниры имеют датчики угловых переi мещений, электрически связанные с системой автоматического управления СЛ гидроцилиндрами подъема и опускания посредством сумматора, усшштеля сигналов и гидроусилителя.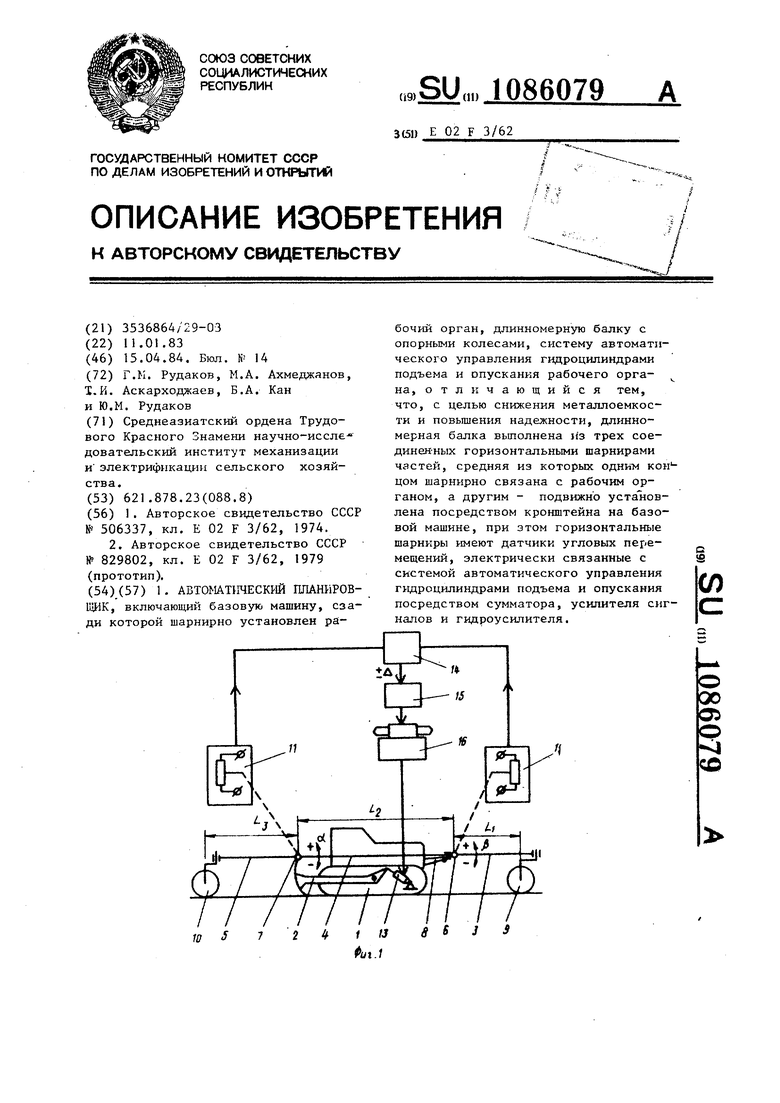
Изобретение относится к сельскому хозяйству, конкретнее к устрой ствам для планировки поверхности полей с автоматической системой управления положением рабочего органа по высоте. Известна планировочная машина, включающая короткобазовую ходовую часть с навешенным на ней рабочим органом и автоматическую гидравлическую систему регулирования вертикального положения рабочего орга на С iD. Недостатками этой машины являет необхрдимость создавать через каждые 15-20 проходов выровненные базовые полосы, передачу усипия, действующего на рабочий орган рамы машины, в связи с чем рама должна вьшолняться жесткой и прочной, а следоватешьно, массивной. Негативн является и наличие замкнутой кинема тической связи гидрораспределителя с копиром , что при наезде копира на высокие крутосклонные возвышения может вызвать деформацию и поломки отдельных элементов этой связи. Наиболее близки т техническим ре нием к предлагаемому является авто матический планировщик, включающий базовую машину, сзади которой шарнирно установлен рабочий орган. Длинномерную балку с опорными коле сами, систему автоматического упра ления гидроцилиндрами подъема и опускания рабочего органа L2 J . Конструктивной особенностью ука занного планировщика является использование длинномерной бгшки ко пира, условия работы которой определяют необходимость обеспечения.высокой жесткости, что, в свою очередь, приводит к повьш1ению ее массивности. Массивная балка копира, включенная как звено в систему управления планировщиком, отрицательно сказывается на его надежности. Цель изобретения - снижение металлоемкости и повышение надежности. Цель достигается тем, что в автоматическом планировщике, включающем базовую машину, сзади которой шарнирно установлен рабочийорган, длинномерную балку с опорньми колесами, систему автоматического управления гидроцилиндрами подъема и опускания pa6o4fro органа, длинномерная балка выполнена из трех соединенных горизонтальными шарнирами частей, средняя из которых одним концом шарнирно связана с рабочим органом, а другим - подвкясно установлена посредством кронштейна на базовой машине, при этом горизонтальные шарниры имеют датчики угловых перемещений, электрически связанные с системой автоматического управления гидроцилиндрами подъема и опускания посредством сумматора усилителя сигналов и гидроусилителя . Кроме того, датчики угловых перемещений, вьшолненные. в виде потенциометров, установленных на осях шарнирных соединений частей длинномерной балки и параллельно включеннь Х в электроцепь сумматора, настроенного на выполнение условия где d,- угол поворота задней частидлинномерной балки; /3 - угол поворота передней части длинномерной балки; Ц длина передней части длинномерно; .балки между шарниром и опорным колесом; L - длина средней части длинномерной балки между ее шар нирами, На фиг. I изображена схема 1шани ровщика, вид сбоку; на фиг.2 - схема длинномерной балки, вид сбоку. Автоматический планировщик включает базовую машину 1 с рабочим opr ном 2, длинномерную балку, ломающуюся на переднюю 3, длиною L, среднюю 4, длиною 1„и заднюю5, длиною. L- части с шарнирами-6 и 7 в местах сочленения. При этом шарнир 6 опираетсяна кронштейн 8, жестко закрепленный на базовой машине 1, а шарнир 7 установлен на верхней части рабочего органа 2. Свободные концы крайиихчастей балки3 и5 опира ются на самоустанавливающиеся колеса и 10. Шарнир 7 оснащен датчиком 11 угловых перемещений (о) между задней 5 и средней 4 частями длинномер ной балки, а шарнир 6 оснащен датчикам 12 угловых перемещений (/J| между средней 4 и передней 3 частям длинномерной балки. Датчики вьшолнены в виде потенциометров и функционально связаны с гидроцилиндром 13. Эта связь выполнена в виде электроцепи, последовательно связывающей эти дат.411ки с сумматором 14, блоком управления 15 (например выпо ненньми на базе субблоков УБСР и электрогидроусилителем. 16, соединен ньш с гидроцилиндром 1 3 гвдропроводо Для достижения эффекта планировк необходимо в работе поддерживать нижнюю кромку рабочего органа 2 и точки опирания колес 9,10 о грунт на одной прямой линии, т.е. при уел Ъии проецкровакияих водку точку, на вертикально-поперечную плоскость. Пр нимая, что ось задней части 5 длинномерной балки всегда параллельна оси абсцисс некоторой системы координат, указанное условие равновесия равноценно условию равенства нулю сумм проекций на ось орди-;. нат средней 4 и передней 5 частей длинномерной балки апи L Sinoi (/i-foi)rO или, учитывая, что при малых угловых перемещениях синус аргумента пропорционален аргументу, можно записать. Обеспечение этого условия контролируется сумматором 14. При движении базового трактора по неспланированному участку, вследствие неровностей, колеса-копиры 10 и 9 балки обкатывают их и части длинномерной балки 3,4,5 произвольно поворачиваются в шарнирных сочленениях относительно друг друга. При этом датчики 11 и 12 вырабатывают сигналы пропорциональные угловь1м перемещениям. Сигналы поступают в сумматор 14, а здесь формируется сигнал рассогласования. Далее последний, усиливаясь и преобразуясь в блоке управления 15, поступает к электрогвдроусилителю 16-, перепускающему рабочую жидкость к гидроцилшщру 13, который перемещает в соответствующую сторону рабочий орган 2.При этом,вследствие установки нерабочем органе 2 шарнира 7, происходит изменеmie соотношения углов между частями . длинномерной Салки3,4 и5 в сторону поддержания условия равновесия автоматической системы управления рабочим органом 2. Например, при въезде переднего колеса 9 в понижение угол ft уменьпшется, условия равновесияЦ 4 становится меньше нуля,и сумматор |4 формирует отрицательный сигнал рассогласования. Последний, преобразуясь и усиливаясь в блоке управления 15, поступает к электрогидроусилителю 16, перепускакацему рабочую жидкость к гидроцилиндру 13 в сторону перемещения рабочего органа вниз. Это приводит к увеличению угла oL до тех пор, пока не восстанавливается условие равновесия. Применение изобретения обеспечивает снижение металлоемкости устройства, повышает его надежность, а также облегчает перевод длинномерной балки в транспортное положение и управление машиной.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Планировочная машина | 1974 |
|
SU506337A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Планировщик | 1979 |
|
SU829802A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
