1
Изобретение относится к строительному, дорожному и мелиоративному машиностроению, в частности к автоматизации землеройных машин.
Цель изобретения - повышение точности управления системы.
На фиг. 1 представлена функцио- . нальная схема системы автоматического управления; на фиг. 2 - пример реализации блоков идентификации рабочего органа.
Землеройная машина 1 оборудована системой автоматического управления положением рабочего органа, состоящего из тяги 2 и ножа, и содержит датчики 3 и 4 перемещения контролируемых точек г и ГЈ, задатчик 5 положения рабочего органа, например генератор опорного луча, первый и второй усилительно-преобразовательные блоки 6 и 7, исполнительный механизм 8 высотного перемещения рабочего органа, исполнительной механизм 9 углового перемещения рабочего органа, управляющие элементы 10 и 11 ( например электроуправляемые распределители) исполнительных механизмов высотного и углового перемещений рабочего органа, блок 12 идентификации плоскопараллельного перемещения рабочего органа и блок 13 идентификации углового перемещения рабочего органа относительно любой из контролируемых
точек г( иг.
L8LКаждый из блоков I1 и 12 имеет два входа и один выход. К первым входам обоих блоков 12 и 13 параллельно подсоединен через усили
5
тельно-преобразовательный блок 6 датчик 3 перемещения первой контролируемой точки, а к вторым входам обоих блоков 12 и 13 параллельно под- ключей датчик 4 перемещения второй контролируемой точки.
На фиг. 1 обозначены: Ш - шарнир поворота рабочего органа исполнительным механизмом 8 высотной системы; Ш2 - шарнир поворота рабочего органа исполнительным механизмом 9; ШЗ - шарнир крепления рычага с датчиками перемещения; 5(гИ 5 - точки крепления датчиков перемещения.
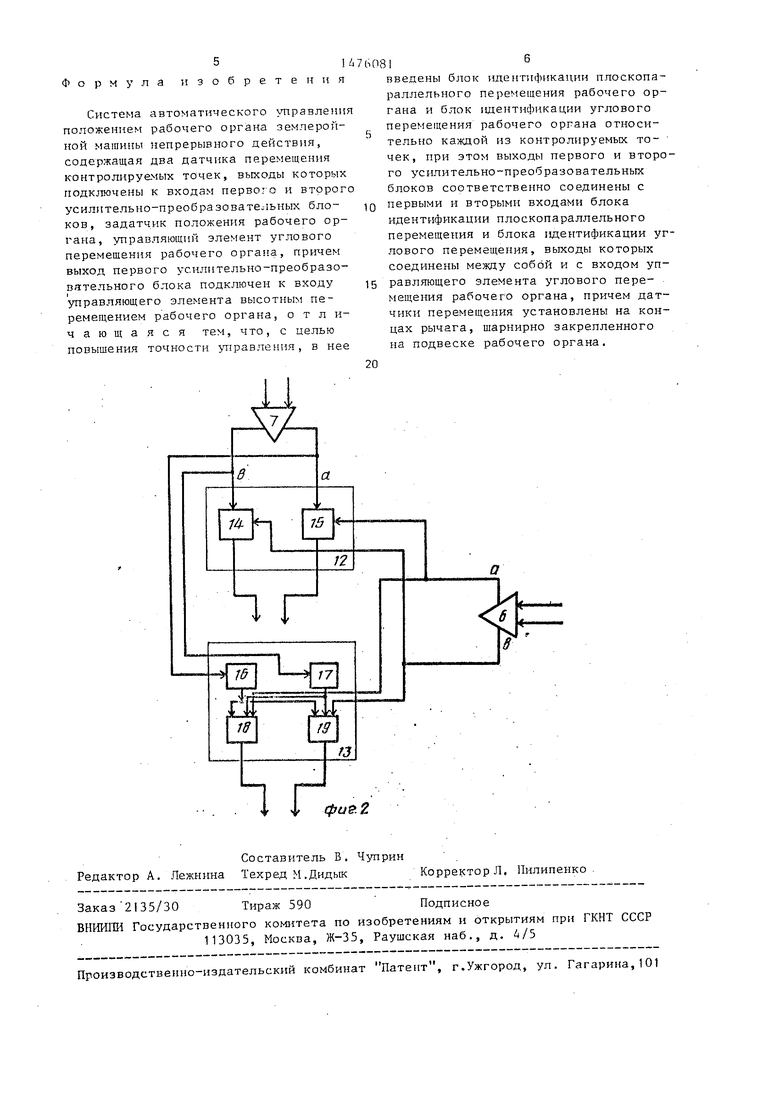
Блок 12СФИГ.2) идентификации плоскопараллельного перемещения рабочего органа состоит из двух схем 14 и 15 логического запрета, к управляющим входам которых подсоединены выходы усилительно-преобразовательного блока 6, а к управляющим входам - выходы усилительно-преобразовательного блока 7.
5 Блок 13 (фиг. 2) идентификации углового перемещения рабочего органа состоит из двух схем отрицания 16 и 17 и двух схем 18 и 19 совпадения. Входы схем отрицания соединены с вы- ходом усилительно-преобразовательного блока 7, а входы схем совпадения - с выходом усилительно-преобразовательного блока 6. При этом выходы схем 16 и 17 соединены с входами схем
35 18 и 19. Рычаг 20, на котором установлены датчики 3 и 4, закреплен в т, ШЗ на тяге 2 рабочего органа.
0
30
3 14
В процессе перемещения землеройной машины по поверхности земли ее рабочий орган перемещается в вертикальной плоскости в соответствии с профилем поверхности.
Генератор 5 опорного луча генерирует луч, который распространяется в пространстве. Датчики 3 и 4 перемещения устанавливают так, чтобы в ходном состоянии рабочего органа луч находился посередине зоны чувствительности обоих датчиков. При этом сигналы на выходе усилительно-преобразовательных блоков 6 и 7 отсутствуют, исполнительные механизмы 8 и 9 не включены, перемещение рабочего органа отсутствует.
При перемещении рабочего органа датчики 3 и 4 перемещаются в вертикальной плоскости относительно опорного луча, что вызывает появление сигнала на их выходе, связанного определенной функциональной зависимостью с этим перемещением. Этот сигнал воспринимается усилительно-преобразовательными блоками 6 и 7, каждый из которых реагирует на входной сигнал появлением сигнала на вь гходе соответствующего блока, что однозначно соответствует положению определенного датчика перемещения относительно опорного луча.
При перемещении рабочего органа вверх ( вниз)на выходе блока 6 появляется сигнал, который приводит к срабатыванию исполнительного механизма системы и возврату датчика в положение равновесия, при котором опорный луч находится в его зоне нечувствительности.
Высотное перемещение рабочего органа может происходить плоскопараллельно или при изменении углового положения рабочего органа. При плоскопараллельном перемещении на датчике 4 также появляется сигнал, который приводит к появлению сигнала на выходе блока 7. При этом, поскольку на обоих входах- блока 2 идентификации плоскопараллельного движения рабочего органа присутствуют одноименные сигналы с выходов блоков 6 и 7, на выходе блока 12 сигнал отсутствует. Одноименными сигналами считаются те сигналы, которые соответствуют перемещению датчиков 3 и 4 в одном направлении относительно копирной линии. Отсутствует также сигнал и на
60814
выходе блока 13 идентификации углового перемещения рабочего органа относительно любой из контролируемых , точек и, следовательно, исполнительный механизм 9 системы стабилизации второй контролируемой точки выключен. Если угловое перемещение рабочего органа происходит относительно точки Ю крепления датчика 4, то сигналы с
него не поступают и усилительно-преобразовательный блок 7 выключен. Однако при этом на выходе блока 13 идентификации углового перемещения 15 рабочего органа относительно любой ,из контролируемых точек сигнал присутствует, что приводит к включению исполнительного механизма 9 в сторону компенсации возмущения, вызванно- 20 го отработкой исполнительного механизма 8 системы стабилизации первой точки r.f .
В том случае, когда изменение углового положения рабочего органа про- 25 исходит относительно точки крепления датчика 3, сигналы с него отсутствуют и блок 6 выключен, а блок 7 включен. При этом на выходе блока 13 идентификации углового перемещения 30 рабочего органа относительно любой из контролируемых точек появляется сигнал и исполнительный механизм 9 включается в сторону компенсации отклонения контролируемой точки от по- 5 ложения равновесия.
В том случае, когда на выходах блоков 6 и 7 присутствуют разноименные сигналы, т.е. оба датчика смещены в разные стороны относительно ко- 0 пирной линии, то на выходе блока 12 присутствует сигнал, а на выходе блока 13 его нет. При этом включен только исполнительный механизм 8 системы стабилизации первой точки. 5 Поскольку плоскопараллельному перемещению ставится в соответствие наличие на выходах датчиков 3 и 4 сигналов одного знака, а угловому перемещению - наличие сигналов разных знаков или наличие сигнала на одном из датчиков и отсутствие на другом, а также учитывая, что сигналы на выходах датчиков имеют вид скачка напряжения (т.е. релейный сигнал), г конкретные логические схемы этих
блоков можно синтезировать с помощью булевой алгебры. В предлагаемой системе автоматического управления эти схемы имеют вид, указанный на фиг.2.
0
фи&.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Полуприцепной дреноукладчик и система регулирования пространственного положения его рабочего органа | 1990 |
|
SU1789614A1 |
| Устройство управления рабочим органом дреноукладчика | 1983 |
|
SU1151647A1 |
| Система управления рабочим оборудованием землеройной машины | 1981 |
|
SU953121A1 |
| Датчик высотного положения недоступной точки рабочего органа землеройной машины | 1987 |
|
SU1587148A1 |
| Система автоматического управления землеройной машины | 1987 |
|
SU1509489A1 |
| Система автоматической стабилизации поперечного наклона рабочего органа автогрейдера | 1986 |
|
SU1481344A1 |
| Устройство автоматического управления бестраншейного дреноукладчика | 1980 |
|
SU907177A1 |
| Датчик высотного положения рабочего органа землеройной машины (его варианты) | 1984 |
|
SU1208151A1 |
| Способ выправки пути в продольном профиле и плане и устройство для его осуществления | 1976 |
|
SU667623A1 |
| Способ программного управления очистным комбайном в профиле пласта | 1990 |
|
SU1756557A1 |
Изобретение относится к строительству, дорожному и мелиоративному машиностроению. Цель - повышение точности управления системы. Система содержит два установленных на концах рычага 20, шарнирно закрепленного на подвеске рабочего органа (РО), датчика 3, 4 перемещения контролируемых точек R1 и R2, усилительно-преобразовательные блоки 6, 7, задатчик 5 положения РО, управляющие элементы углового 10 и высотного 11 перемещений РО, блоки идентификации плоскопараллельного 12 и углового 13 перемещений РО относительно каждой из контролируемых точек R1 и R2. Плоскопараллельное перемещение соответствует наличию на выходах датчиков 3 и 4 сигналов одного знака, а угловому перемещению - наличие сигналов разных знаков или наличие сигнала на одном из датчиков и отсутствие на другом. Сигналы на выходах датчиков 3 и 4 имеют вид скачка напряжения, т.е. носят релейный характер. Блоки 12 и 13 логически обрабатывают эти сигналы и подают соответствующие управляющие сигналы на элементы 10 и 11, которые посредством исполнительных механизмов 8 или 9 компенсируют отклонения контролируемой точки от положения равновесия. 2 ил.
| Устройство для управления положением рабочего органа землеройных машин | 1976 |
|
SU726277A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| МУФТА ОПЕРЕЖЕНИЯ ВПРЫСКИВАНИЯ ТОПЛИВА ДИЗЕЛЯ | 1991 |
|
RU2009360C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
