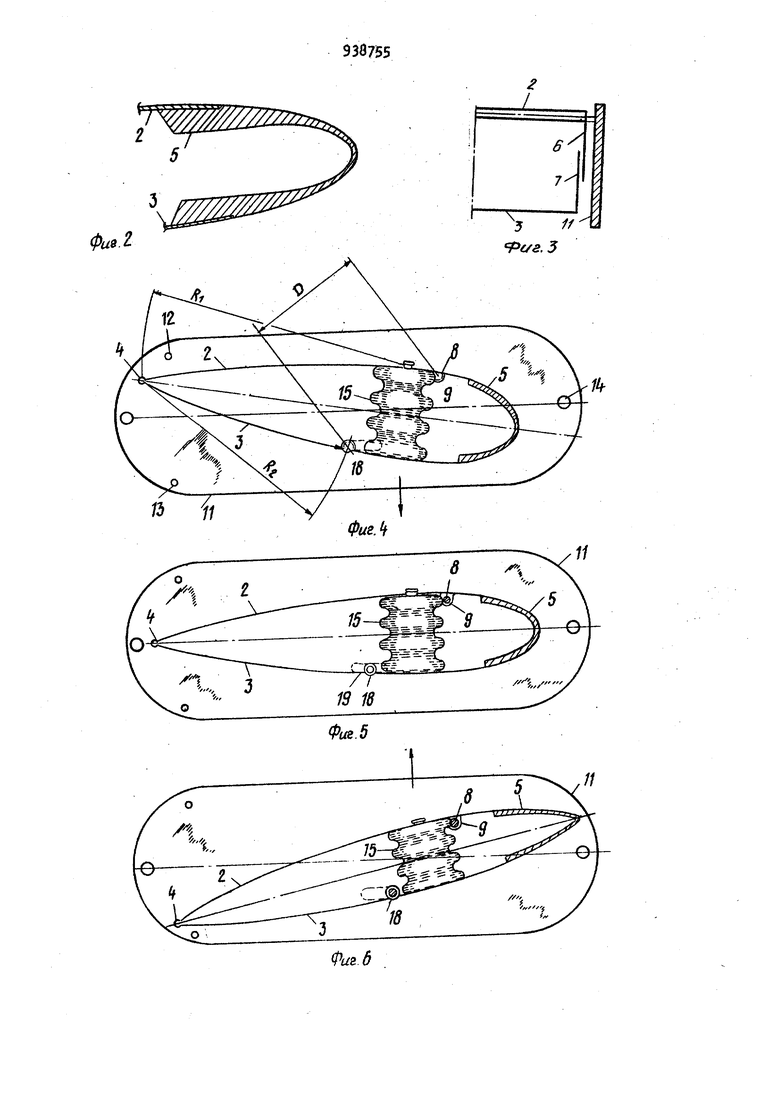
(ЗО УСТРОЙСТВО для АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ БУКСИРУЕМОГО В ВОДЕ Изобретение.относится к автоматическому регулированию глубины погружения какого-либо элемента, действующего в подводной среде, и может быть использовано при подводной сейсмической разведке для стабилизации на определенной (заданной) глубине источников сейсмических волн или приемных устройств. Известно устройство для регулирова ния глубины погружения сейсмического кабеля, содержащее недеформируемое крыло, выполненное с возможностью вращения вокруг оси, жестко скрепленной с буксируемым объектом, и средства для изменения угла наклона крыла в зависимости от глубинь погружения буксируемого кабеля 1 . Наиболее близким к предлагаемому по технич.еской сущности и достигаемому результату являeтc i устройство для автоматического регулирования глу бины погружения буксируемого в воде объекта, содержащее недеформируемое ОБЪЕКТА. крыло, заключенное между боковыми стенками и образованное верхней и нижней поверхностями, выполненное с возможностью перемещения вокруг оси вращения, жестко связанной с объектом, и автоматический механизм регулирования глубины погружения, выполненный в виде чувствительного к изменению давления элемента, связанного с механизмом преобразования движений деформации элемента во вращательное движение крыла 2. Недостатком указанных устройств является их малая чувствительность, что связано с малыми относительно размеров крыла размерами чувствительного элемента. Целью изобретения является повышение чувствительности устройства. Поставленная цель достигается тем, что в устройство для автоматического регулирования глубины погружения буксируемого в воде объекта, содержащее крыло, образованное нижней и верхней поверхностями, заключенное между двумя боковыми стенками и выполненное с возможностью перемещения вокруг оси вращения, жестко связанной с объектом, и автоматический механизм регулирования глубины погружения, введена дополнительная шарнирная ось и деформируемый элемент, причем нижняя и верхняя поверхности крыла шарнирно закреплены одними концами на указанной о от оси и соединены на других концах деформируеммм элементом, а автоматический механизм регулирования содержит средства для создания между нижней и верхней поверхностями усилия сдвига, равного усилию, образуемому гидро статическим давлением на заданной глу бине, и систему преобразования и;зменений указанного уси/мя сдвига в усилие для поворота крыла вокруг оси вращения, при этом средства для образования усилия сдвига между нижней и верхней поверхностями выполнены либо в виде манометрической коробки, расположенной внутри крыла, концы которой закреплены на указанных поверхностях, либо содержат надувной пояс, также расположенный внутри крыла, и пружины, закрепленные на указанных поверхностях, система же преобразования содержит стержень, жестко связанный с крылом, а его концы размещены в отверстиях удлиненной формы, выполненных в боковых стенках и имеющих направление удлинения, отличающееся от направления, соединяющего ось вращения и указанный стержень. На фиг. 1 изображен первый вариант конструкции крыла, общий вид; на фиг. 2 - деформирующаяся пластина, соединяющая две поверхности крыла; на фиг. 3 - боковое соединение между двумя боковыми стенками крыла, частич ный разрез; на фиг. - крыло в положении погружения, разрез; на фиг. 5 крыло в среднем положении, разрез; на фиг. 6 - крыло в положении всплытия, разрез; на фиг. 7 - второй вариант конструкции крыла, общий вид. В первом варианте конструкции (фиг. 1-6) устройство включает крыло 1, имеющее первую профилированную поверхность или верхнюю поверхность 2 и вторую профилированную поверхность ИЛИ нижнюю поверхность 3, задние кром ки которых ( ребро обтекания) соединены при помощи шарнира f, а передние кромки соединены при помощи согнутой 938 пластины 5 изготовленной из деформирующегося материала методом формирования (фиг. 2) и образующей переднюю кромку (ребро атаки) крыла. Обе пластины крыла имеют боковые стенки 6 и (фиг. З). Верхняя пластина крыла 7 приспособлена для того, чтобы вдвигаться в нижнюю пластину. Внутренний объем крыла не изолирован герметично внешней среды. Когда устройство находится в погруженном состоянии, внутренний объем крыла заполняется водой. В поперечном направлении крыло neресекает стержень 8, представляющий собой ось вращения, закрепленную в подшипниках 9, которые крепятся, например, на внутренней поверхности верхней пластины крыла. Две боковые пластины или стенки 10 и 11 расположены по обеим сторонам крыла, параллельно боковым стенкам обеих пластин, и жестко скреплены друг с другом при помощи стержня и двух распорок 12 , и 13. В пластинах имеются отверстия 1, позволяющие закрепить устройство на погруженном элементе, который необходимо стабилизировать на постоянной глубине. Внутри крыла расположены одна или несколько манометрических коробок 15 имеющих цилиндрическую форму и деформирующихся только по оси вращения. Торцевые поверхности коробок крепятся болтами 16 к нижней и верхней пластинам. Манометрические коробки могут быть изготовлены, например, из резины, усиленной металлическими кольцами. На внешнюю поверхность верхней пластины выведены клапаны 17, позволяющие надувать манометрические коробки до определенного давления. Внутри крыла расположен также стержень 18. Он пронизывает боковые стенки нижней пластины крыла, а концы его располагаются в двух прорезях 19 удлиненной формы, проделанных в боковых стенках, параллельных стенкам крыла. Расположенные внутри крыла стержни, которые крепятся к верхней и нижней пластинам, находятся с двух сторон от того места, где манометрические коробки упираются в обе пластины кры;,а, причем стержень 8 расположен к ребру атаки крыла, удлиненные прорези сделаны с некоторым наклоном относительно сегмента длины D (фиг.), соединяющего два стержня, но, например, строго параллельно поперечной оси крыла, т.е. оси, соединяющей ребро атаки и ребро обтекания, в случае когда крыло находится в среднем положении .обеспечивающем перемещение на постоянной глубине погружения (фиг.5 Расстояние D между стержнями выбирается в зависимости от высоты мано-, метримеских коробок с тем, чтобы крыло занимало среднее положение в момент, когда давление газа внутри коробок уравновесит внешнее гидростатическре давление, соответствующее .заданной глубине. Расстояния R и между шарниром и указанными стержнями должны быть постоянными. Устройство функционирует следующим образом. Если весь буксируемый в погруженном состоянии комплекс опускается ниже уровня, на котором крыло находится в среднем состоянии, гидростатиче кое давление начинает превышать давление газа в манометрических коробках, в результате чего коробки сжимаются по своим осям. Нижняя и верхняя пластины крыла стремятся сблизит ся, и расстояние D между стержнями I уменьшается. Стержень 18 перемещается в прОрези 19 в направлении ребра атаки крыла. Однако ввиду того, что расстояния R и RX. постоянны, такое перемёщение становится возможным только В результате поворота шарнира вниз (фиг. 6). Ребро атаки крыла перемещается вверх, в результате чего под дей ствием гидродинамической тяги крыло вместе со всем буксируемым элементом поднимается и выходит на заданную глубину. Как только будет достигнуто равенство давлений, крыло вновь встанет в среднюю позицию. Если весь буксируемый в погруженном состоянии комплекс поднимается выше заданной глубины ( крыло в среднем положении гидростатическое давление становится ниже давления газа в манометрических коробках. Коробки расширяются по осям вращения и стремятся увеличить расстояние между плас тинами крыла (фиг. )). Расстояние увеличивается, а стержень 18 стремится отдалиться от стержня 8, перемещаясь в прорези 19. Однако такое перемещение становится возможным только в результате поворота шарнира вверх. Ребро атаки крыла отклоняется вниз и гидростатическое давление порождает усилие, стремящееся вернуть крыло на заданный уровень. Во втором варианте конструкции (фиг. 7} крыло при помощи стержня и деталей 20 шарнирно закреплено на подставке 21, имеющей форму изогнутой трубы. Манометрические коробки заменены надувным мешком 22 из эластичного материала оборудованным клапаном 23f через который мешок можно накачать воздухом до определенного давления, .соответствующего нужной глубине погружения. Как и в первом варианте конструкции, через клапан 23 мешок может сообщаться с резервуаром, емкостью превосходящим объем мешка и содержащим сжатую жидкость. Пружины 2А крепятся одним концом к верхней пластине крыла, а другим концом - к оси 18, жестко соединенной с нижней пластиной крыла. Подставка тр чатого сечения 21 и детали 20 могут быть заменены пластинами 10 и 11 (фиг. 1 или любой другой соответствующей системой крепления. Принцип действия этого устройства идентичен принципу действия устройства по первому варианту исполнения. Однако, когда мешок сжимается под действием гидростатического давления, оказываемого содержащейся в крыле водой, он не может сблизить две пластины крыла, если он не прикреплен к крылу. Роль пружин 2k состоит в том, что они сближают пластины крыла, давая таким образом ребру атаки возможность отклониться вверх. В обоих вариантах конструкции перед погружением устройства в манометрические коробки 15 или в мешок накачивается воздух под давлением, равным гидростатическому давлению на заданной глубине, которое неизбежно превышает атмосферное давление. В результате этого крыло занимает положение, показанное на фиг. k. Когда устройство погружается в воду, скорость погружения (довольно высокая вначале постепенно уменьшается в результате перемещения крыла в среднее положение. Погружение прекращается, как только достигается равенство давлеий. Конструкция предлагаемого устройства предполагает также замену манометрических коробок или эластичного мешка любым приспособлением, объем
которого может изменяться под действием силы давления.
Формула изобретения
1. Устройство для автоматического регулирования глубины погружения буксируемого в воде объекта, содержащее крыло, образованное нижней и верхней поверхностями, заключенное между двумя боковыми стенками и выполненное с возможностью перемещения вокруг оси вращения, жестко связанной с объектом, и автоматический механизм регулирования глубины погружения, отличающееся тем, что, с целью повышения чувствительности устройства в него введены дополнительная шарнирная ось и деформируемый элемент, причем нижняя и верхняя поверхности крыла шарнирно закреплены одними концами на указанной оси и соединены на других концах деформируемым элементом, а автоматический механизм регулирования содержит средства для создания между нижней и верхней поверхностями усилия сдвига, равного усилию, образуемому гидростатическим давлением на заданной глубине, и систему преобразования изменений указанного усилия сдвига в усилие для поворота крыла вокруг оси вращения.
2.Устройство по п.1,отличающееся тем, что средства для образования усилия сдвига между нижней и верхней поверхностями выполнены в виде манометрической коробки, расположенной внутри крыла, концы которой закреплены на указанных поверхностях.
3.Устройство по п. 1, о т л и чающееся тем, что средства для образования между нижней и верх1ней поверхностями усилия сдвига содержат надувной пояс, расположенный внутри крыла, и пружины, закрепленные на указанных поверхностях.
k. Устройство по п. 1, о т л и чающееся тем, что система преобразования содержит стержень, жестко связанный с крылом, его концы размещены в отверстиях удлиненной формы выполненных в боковых стенках и имеющих направление удлинения, отличающееся от направления, соединяющего ось вращения и указанный стержень.
Источники информации, принятые во внимание при экспертизе
1.Патент США № 3375800, кл. 11.235, опублик. 1967.
2,Патент США W З 35797,
кл. 114.235, опублик. 19б7 (прототип Фив.г /3 f,

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования глубины погружения буксируемого объекта | 1990 |
|
SU1749866A1 |
| Стабилизатор глубины погружения буксируемого в воде объекта | 1973 |
|
SU603932A1 |
| Параван для буксируемых приемных систем в морской сейсморазведке | 1983 |
|
SU1158957A1 |
| БУКСИРУЕМЫЙ НОСИТЕЛЬ ДЛЯ ГИДРОНАВТОВ | 1993 |
|
RU2070130C1 |
| ПОДВОДНЫЙ БУКСИРУЕМЫЙ АППАРАТ | 1995 |
|
RU2096246C1 |
| КРЫЛОВИДНАЯ ТРАЛОВАЯ ДОСКА | 2001 |
|
RU2194388C1 |
| СПОСОБ ИЗЛУЧЕНИЯ ЗВУКА В ЖИДКУЮ СРЕДУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2071637C1 |
| СПОСОБ И УСТРОЙСТВО ПОВЫШЕНИЯ СВЕТИМОСТИ СОПЛА ЛОЖНЫХ ТЕПЛОВЫХ ЦЕЛЕЙ ОДНО- И МНОГОРАЗОВОГО ИСПОЛЬЗОВАНИЯ НА ЖИДКИХ УГЛЕВОДОРОДНЫХ ГОРЮЧИХ | 2001 |
|
RU2228456C2 |
| ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВОДНОЙ СРЕДЫ НА ХОДУ СУДНА (ВАРИАНТЫ) | 2017 |
|
RU2669251C1 |
| ДИНАМИЧЕСКИ УПРАВЛЯЕМЫЕ КРЫЛЬЕВЫЕ СИСТЕМЫ И СПОСОБЫ | 2016 |
|
RU2729696C2 |