Настоящее изобретение относится к устройству для захвата, перемещения и установки на место упаковочных блоков, в частности поддонов, например поддонов с яйцами, которое содержит:
захватную раму, соединенную с рычагом или балкой для выполнения с их помощью смещения, например перемещения по вертикали и/или поворота, захватной рамы;
две захватные пластины, которые соединены с возможностью вращения с захватной рамой и которые входят в контакт с упаковочными блоками с двух противоположных сторон;
две опорные полосы, причем каждая опорная полоса соединяется своей верхней кромкой с нижней кромкой захватной пластины, соответствующей опорной полосе, посредством шарнирного соединения, простирающегося по существу в горизонтальном направлении;
исполнительный механизм, который при по существу горизонтальном захвате и установке упаковочных блоков выполняет движение по вертикали для приведения захватных пластин и опорных полос в положение захвата и положение освобождения для оперативного захвата и освобождения упаковочных блоков соответственно,
средство управления, соединенное с захватной рамой, с опорными полосами и с исполнительным механизмом.
Такое устройство описано в NL1013281. В этой публикации описано захватное устройство, которое с двумя захватными пластинами, соединенными с захватной рамой, и, кроме того, с системой стержней между пластинами и захватной рамой способно захватывать множество поддонов, предназначенных, например, для яиц, и помещать их в ящики. Показано, каким образом поддоны, в частности множество поддонов, переносятся на полосах, и для этого эти полосы обладают достаточной шириной. Любому специалисту в данной области техники понятно, что после поворота полос с их выводом из положения переноса, когда эти полосы обращены по существу вертикально вниз, такой поддон, или множество поддонов, упадет вниз на определенное расстояние, равное ширине этих полос. Это влечет за собой, в особенности в случае, когда поддоны заполнены хрупкими продуктами типа яиц, опасность повреждения, а также неправильного относительного расположения поддонов.
Кроме того, должно быть понятно, что захватное устройство, описанное в NL1013281, обычно используется для захвата и установки набора и соответственно обладает способностью к согласованию размеров и веса. Поскольку такое захватное устройство используется для работы с набором, возникает необходимость перед захватом формировать набор или вручную, или с помощью штабелера, например, как описано в ЕР386347. Таким образом, выполнение работы с такими упаковочными единицами дополнительно усложняется.
Для того чтобы устранить перечисленные недостатки, устройство согласно настоящему изобретению отличается тем, что опорные полосы на своих сторонах, противоположных верхней кромке, снабжены каждая опорными концами; что средство управления содержит отдельную подъемную плиту, которая помещена под захватной рамой и между захватными пластинами и которая, прилегая к концам указанных шарниров, соединяется с опорными полосами, когда во время движения подъемной плиты по вертикали вверх относительно захватной рамы опорные полосы перемещаются в положение захвата, и при этом положении захвата штучные упаковки захвачены, будучи зажаты между захватными пластинами и опираясь на опорные концы опорных полос, и во время движения подъемной плиты вниз относительно захватной рамы опорные полосы переходят в положение освобождения, так что опорные полосы по существу отходят друг от друга, а также поворачиваются наружу, так что в процессе использования происходит освобождение упаковочных блоков.
С помощью такого устройства получается значительно упрощенная захватная головка, обладающая значительными преимуществами. С ее помощью весьма удобным образом могут происходить захват и перемещение отдельных упаковочных блоков, причем особенно важно, что их установка происходит очень постепенно. В частности, зажатые поддоны немного прогибаются вниз, при установке входят в контакт своей искривленной частью с нижележащей несущей поверхностью, и при освобождении очень постепенно устанавливаются и помещаются на несущей поверхности. Доказано, что это обеспечивает надежность работы.
Согласно дальнейшему совершенствованию изобретения в целях захвата поддонов, снабженных гнездами, предназначенными, например, для размещения в них яиц или по существу имеющих сферическую форму фруктов, каждая опорная полоса снабжена опорными концами, причем опорные концы ограничивают принимающие углубления в виде ячеек в опорных полосах.
При таких опорных полосах создается большая опорная поверхность, что обеспечивает оптимальную поддержку поддонов.
Согласно дальнейшему совершенствованию изобретения опорные концы могут быть снабжены выступами в форме зубцов, которые доходят до принимающих углублений в виде ячеек. Предпочтительно выступы в форме зубцов разработаны таким образом, чтобы при положении захватного устройства в положении захвата они находились в зацеплении с ячейками поддона. Таким образом, прогиб поддона ограничивается тем, что кромки поддона, входящие в контакт с опорными полосами, не могут перемещаться по направлению друг к другу.
Устройство для захвата и установки на место отдельных поддонов известны также из заявки US2002/005646. В этой публикации описано, каким образом использование сложного узла из соединительных деталей, и соединительных рычагов, и, кроме того, центральной распределительной рычажной детали обеспечивает захват и установку поддона.
В других вариантах реализации устройство может отличаться тем, что подъемная плита соединяется с опорными полосами посредством четырех соединений штифт-паз, причем прорези выполнены в подъемной плите, а штифты соединяются с опорными полосами;
тем, что прорези проходят по существу горизонтально, в то время как штифты проходят параллельно шарнирам и размещаются на первых концах рычагов, которые другими своими концами соединяются с опорными полосами, прилегающими к их верхним кромкам;
тем, что устройство также содержит с обеих упомянутых сторон по меньшей мере одну пружину растяжения, причем каждая натянута с соответствующей стороны между соответствующей захватной пластиной и кромкой захватной рамы;
тем, что подъемная плита содержит верхнюю плиту, имеющую боковые поверхности, расположенные с обеих ее сторон, и имеют по существу форму равнобедренной трапеции, в то время как исполнительный механизм соединяется с верхней плитой; и/или
исполнительный механизм содержит поршень с пневматическим приводом.
Дополнительные детали устройства согласно изобретению будут описаны со ссылкой на чертежи, на которых:
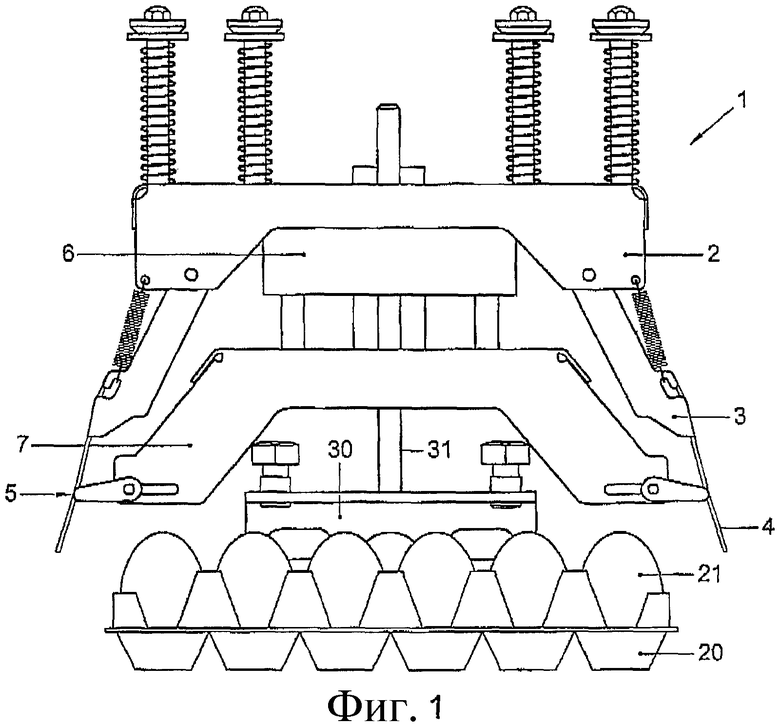
на фиг.1 схематически показан вид сбоку устройства согласно изобретению перед захватом заполненного поддона;
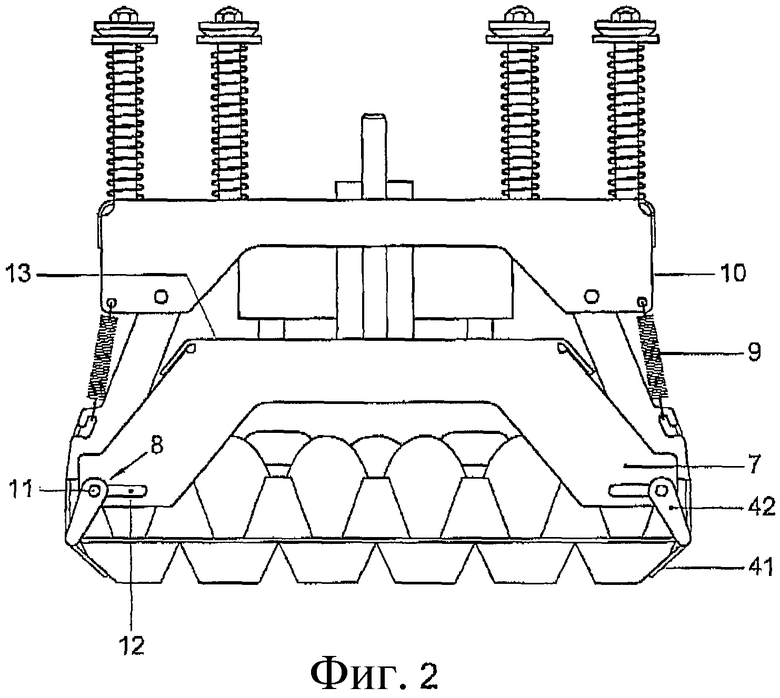
на фиг.2 схематически показан вид сбоку устройства согласно изобретению в положении захвата после захвата заполненного поддона;
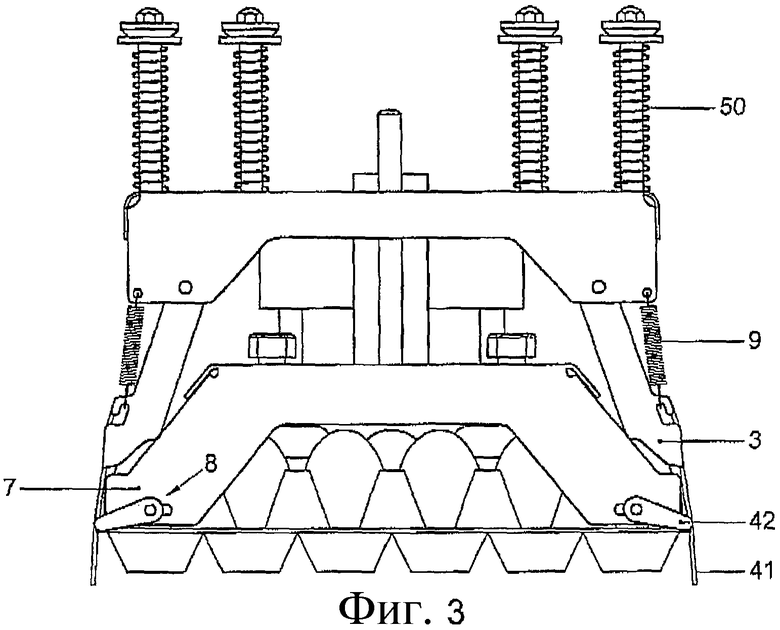
на фиг.3 схематически показан вид сбоку устройства согласно изобретению в положении освобождения при освобождении заполненного поддона;
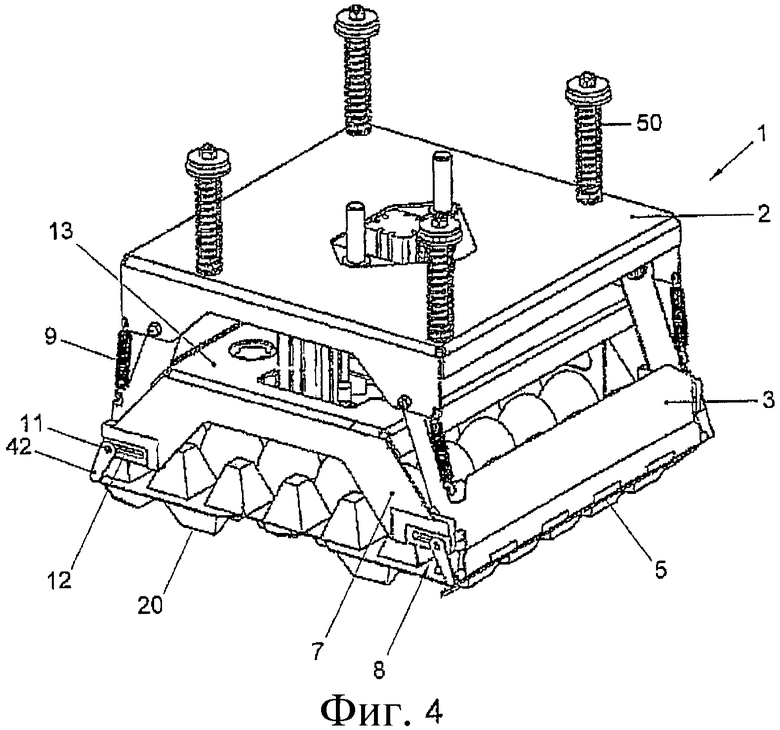
на фиг.4 показан изометрический вид положения согласно показанному на фиг.2;
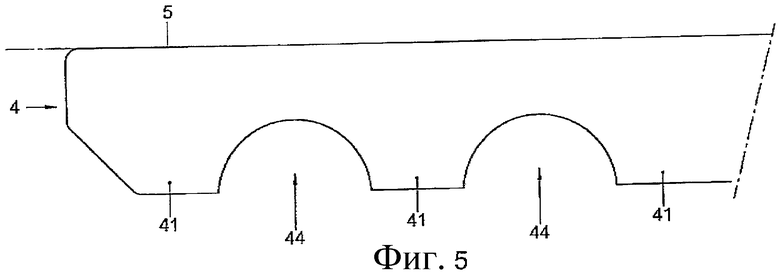
на фиг.5 показан вид сверху первого служащего примером варианта реализации опорной полосы;
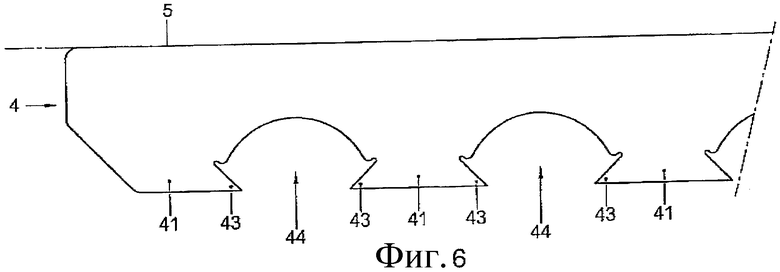
на фиг.6 показан вид сверху второго служащего примером варианта реализации опорной полосы;
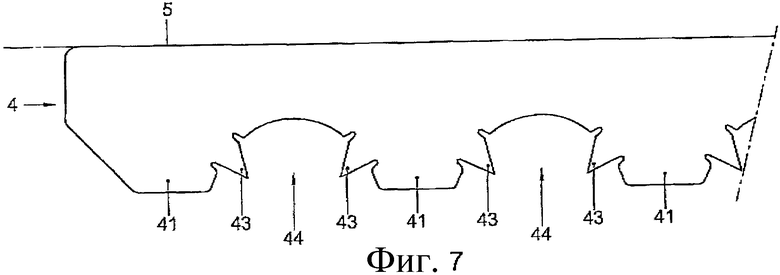
на фиг.7 показан вид сверху третьего служащего примером варианта реализации опорной полосы;
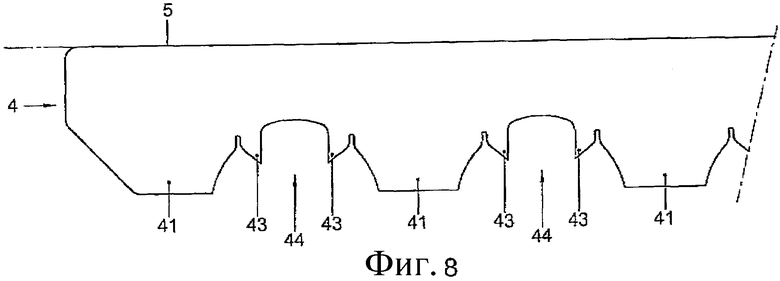
на фиг.8 показан вид сверху четвертого служащего примером варианта реализации опорной полосы.
На различных чертежах одинаковыми числовыми позициями обозначены одинаковые детали.
На фиг. 1, 2, 3 и 4 главный компонент устройства обозначен как захватная головка 1. Захватная головка 1 содержит захватную раму 2, с которой стержневыми соединителями соединены захватные пластины 3. С нижней стороной захватных пластин 3 посредством шарниров 5 соединяются опорные полосы 4. Не показано, каким образом верхняя сторона захватной рамы 2 соединяется с рычагом или балкой, способной в общем выполнять возвратно-поступательные движения по вертикали или, при желании, также поворачиваться. При такой ситуации понятно, что шарниры 5 проходят по существу горизонтально. Для поглощения возможного удара при подъеме и опускании или установке захватной головки поверх захватной рамы 2 размещаются амортизационные пружины 50. Кроме того, на чертежах представлен исполнительный механизм 6, который соединяется одной стороной с захватной рамой 2 и другой стороной - с подъемной плитой 7. Этот исполнительный механизм 6 будет также перемещаться по существу по вертикали и поэтому обладает способностью перемещать подъемную плиту 7 вверх или вниз относительно захватной рамы 2. Любому специалисту в данной области техники должно быть ясно, что в качестве такого исполнительного механизма 6 могут использоваться механизмы различных типов, например пневматические, гидравлические или электромагнитные, чаще сервомотор.
В частности, на фиг.2 представлено, как в положении захвата поддон 20 с ячейками, заполненными яйцами 21, по существу опирается на опорные концы 41, образующие концы опорных полос 4.
Различные конструкции опорных полос, в частности их опорных концов 41, представлены на фиг.5-8.
Отметим, что захватные пластины 3 помещены против противоположных сторон поддона 20, создавая такой зажим, при котором поддон 20 немного прогибается. Кроме того, отметим, что эти опорные концы 41 настолько широки, что размещаются, образуя опору, против боковых сторон наружных ячеек по бокам поддона 20. Иными словами, опорные концы 41 опорных полос 4 сконструированы таким образом, что как следует поддерживают ячейки, которые ограничивают боковые стороны поддона, захваченные захватными лопастями 3.
В показанном в качестве примера варианте реализации подъемная плита 7 имеет периферическую форму с прямоугольной верхней плитой 13 с боковыми поверхностями, имеющими форму равнобедренной трапеции. На четырех острых углах этих трапеций подъемная плита 7 соединяется с опорными полосами 4 посредством четырех соответствующих соединений штифт-паз 8. В частности, штифты 11 размещаются на первых концах рычагов 42, которые другими своими концами соединяются с опорными полосами 4, прилегающими к шарнирам 5. Эти штифты 11 могут перемещаться в прорезях 12 боковой поверхности подъемной плиты 7. В показанном в качестве примера варианте реализации эти прорези 12 проходят по существу горизонтально.
Путем сопоставления фиг.1, 2 и 3 между собой можно следующим образом понять, каким образом действует захватная головка 1.
На фиг.1 захватная головка показана в открытом положении.
На фиг.2 захватная головка показана в положении захвата, а на фиг.3 захватная головка 1 показана в положении освобождения, при котором поддон может быть высвобожден в наружном ящике.
На фиг.1 захватную головку 1 устанавливают в нужное положение над заполненным поддоном 20 с помощью рычага или балки, упомянутых выше, но не показанных. Опорные полосы 4 находятся в это время в положении, при котором они как можно более широко раскрыты. Это осуществляется путем проталкивания подъемной плиты 7 исполнительным механизмом 6 вниз относительно захватной рамы 2, посредством чего через соединения штифт-паз 8 эти опорные полосы 4, а также захватные пластины 3 смещаются наружу, причем движение опорных полос 4 можно наблюдать как комбинацию перемещения и вращения. Такую правильную установку на место будет контролировать, например, компьютерная программа с датчиками, направляющими для обработки управляющие сигналы относительно высоты, ширины и т.п.
На фиг.2 захватная головка 1 перемещается вниз, а подъемная плита 7 перемещается вверх относительно захватной рамы 2 с помощью исполнительного механизма 6, посредством чего через соединения штифт-паз 8 опорные полосы 4 поворачиваются по существу внутрь к поддону 20 и будут таким образом поддерживать поддон 20 опорными концами 41. В этом положении захвата поддон можно захватить и переместить в другое нужное место или положение. В большинстве случаев захватная головка будет перемещаться вверх и или перемещаться к ящику или таре для упаковки или ожидать, пока под ней установят ящик или тару для упаковки, чтобы поместить затем в нее поддон.
На фиг.3, в заключение, представлено, как исполнительный механизм 6 перемещает подъемную плиту в определенной степени, или также выше ранее показанной высоты, вниз относительно захватной рамы 2, посредством чего через соединения штифт-паз опорные полосы 4 вновь поворачиваются наружу. В данном случае будет также разъяснено действие пружин растяжения 9, которые, обычно в количестве четырех, по две с каждой стороны захватной головки 1, соединяют захватные пластины 3 с кромкой захватной рамы 10, расположенной на соответствующих сторонах захватной головки 1. Более конкретно, в показанном в качестве примера варианте реализации эти пружины 9 будут гарантировать, что в зависимости от положения исполнительного механизма 6 узел опорной полосы 4 и захватной пластины 3 занимает фиксированное положение при способности к свободному движению. Кроме того, соединения штифт-паз 8 делают возможным, при установке в ящике или таре для упаковки, которых часто называют наружным ящиком, поворот наружу опорных полос 4 при освобождении под воздействием пружин растяжения 9, в результате чего опорные концы 41 займут по существу вертикальное положение напротив стенок наружного ящика, позволяя им перемещаться вверх вдоль этих стенок при освобождении, установке и оставлении позади поддона или упаковочного блока в наружном ящике.
Дополнительно на чертежах показана плита 30 с исполнительным механизмом 31, которая используется в качестве зацепа или толкателя при захвате или установке штучных упаковок. Этот привод может быть, например, пневматическим, гидравлическим или электромагнитным.
На фиг.5 показан в качестве примера вариант реализации опорной полосы 4. Числовая позиция 5 обозначает положение шарнира, посредством которого опорная полоса 4 крепится к захватной пластине 3. На стороне опорной полосы 4, удаленной от захватной пластины 3, опорная полоса 4 снабжена упомянутыми ранее опорными концами 41. Эти опорные концы 41 в показанном в качестве примера варианте реализации на фиг.5 огранивают принимающие углубления в виде ячеек 44. Ячейки поддона могут быть вмещены и могут содержаться в принимающих углублениях в виде ячеек 44, так что поддон получает достаточную поддержку.
На фиг.6-8 представлены варианты опорных полос. Все эти варианты отличаются от варианта, представленного на фиг.5, наличием зубцов 43, доходящих до принимающих углублений в виде ячеек 44. Эти зубцы 43 взаимодействуют с поддоном и не позволяют сторонам поддонов, зацепленным зубцами, сдвигаться по направлению друг к другу. Это не допускает прогиба поддонов.
Любому специалисту в данной области техники должно быть ясно, что небольшие отклонения, а также тесно связанные варианты реализации должны охватываться объемом охраны прилагаемой формулы изобретения. Например, соединения штифт-паз могут быть сконструированы таким образом, например, с прорезью, следующей по четко обозначенной кривой, причем за счет этого получается заданное перемещение опорных полос, и в этом случае можно обойтись без пружин растяжения. Кроме того, можно выбрать прорезь, открытую с одного конца, и в то же время достаточно протяженную для того, чтобы штифт никогда не выходил из нее, что создает возможность быстрой и эффективной замены опорных полос на другие виды упаковочных блоков. Другой возможностью является использование электромагнитных соединительных элементов для соединения подъемной плиты с опорными полосами.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАШИНА ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В ТАРУ | 2006 |
|
RU2303560C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОДАЧИ КАТУШЕК В МАШИНУ | 2002 |
|
RU2296096C2 |
| СПОСОБ И УСТАНОВКА ДЛЯ СОЕДИНЕНИЯ ПЛАСТИН АККУМУЛЯТОРА В ПАКЕТЫ И ДЛЯ ВСТАВКИ ЭТИХ ПАКЕТОВ В АККУМУЛЯТОРНЫЕ ЯЩИКИ | 2005 |
|
RU2371814C2 |
| СИСТЕМА ЛИТЬЯ БЕТОНА | 1995 |
|
RU2158195C2 |
| Способ изготовления предварительно напряженных железобетонных изделий и устройство для его осуществления | 1990 |
|
SU1838549A3 |
| УПАКОВОЧНЫЙ АППАРАТ | 2009 |
|
RU2536445C2 |
| УПАКОВОЧНАЯ МАШИНА | 2011 |
|
RU2576452C1 |
| Установка для упаковки рулонов на поддоне | 1979 |
|
SU861174A1 |
| СИСТЕМА ДЛЯ УПАКОВЫВАНИЯ ГРУЗОВ | 2007 |
|
RU2415784C2 |
| СИСТЕМА И СПОСОБ ПРИЕМА ДЕПОЗИТОВ В БАНКОМАТЕ, ВЫДАЮЩЕМ НАЛИЧНЫЕ | 2004 |
|
RU2308087C2 |
Изобретение относится к устройству, более конкретно к захватной головке, предназначенной для захвата, перемещения и установки упаковочных блоков, в частности поддонов, например поддонов с яйцами. Устройство содержит захватную раму, соединенную с рычагом или балкой для выполнения с их помощью смещения, например перемещения по вертикали и/или поворота, захватной рамы, две захватные пластины, которые соединены с возможностью вращения с захватной рамой и которые входят в контакт с упаковочными блоками с двух противоположных сторон, две опорные полосы, причем каждая опорная полоса соединяется своей верхней кромкой с нижней кромкой захватной пластины, соответствующей опорной полосе, посредством шарнира, простирающегося по существу в горизонтальном направлении, исполнительный механизм, средство управления, соединенное с захватной рамой, с опорными полосами и с исполнительным механизмом. Средство управления содержит отдельную подъемную плиту, которая размещена под захватной рамой и между захватными пластинами и соединяется с опорными полосами. Изобретение обеспечивает упрощение конструкции и повышение надежности работы. 7 з.п. ф-лы, 8 ил.
1. Устройство для захвата, перемещения и установки упаковочных блоков, в частности поддонов, например поддонов с яйцами, содержащее:
захватную раму, соединенную с рычагом или балкой для выполнения с их помощью смещения, например перемещения по вертикали и/или поворота захватной рамы;
две захватные пластины, которые соединены с возможностью вращения с захватной рамой и которые входят в контакт с упаковочными блоками с двух противоположных сторон;
две опорные полосы, причем каждая опорная полоса соединяется своей верхней кромкой с нижней кромкой захватной пластины, соответствующей опорной полосе, посредством шарнира, простирающегося, по существу, в горизонтальном направлении;
исполнительный механизм, который при, по существу, горизонтальном захвате и установке упаковочных блоков выполняет движение по вертикали для приведения захватных пластин и опорных полос в положение захвата и положение освобождения для оперативного захвата и освобождения упаковочных блоков соответственно, и
средство управления, соединенное с захватной рамой, с опорными полосами и с исполнительным механизмом,
отличающееся тем, что опорные полосы на своей стороне, противоположной верхней кромке, снабжены каждая опорными концами, при этом средство управления содержит отдельную подъемную плиту, которая размещена под захватной рамой и между захватными пластинами, и сопряжением с концами указанных шарниров соединяется с опорными полосами, причем при движении подъемной плиты по вертикали вверх относительно захватной рамы опорные полосы перемещаются в положение захвата, и при этом положении захвата упаковочные блоки захвачены, будучи зажаты между захватными пластинами и опираясь на опорные концы опорных полос, и при движении подъемной плиты вниз относительно захватной рамы опорные полосы переходят в положение освобождения, так что опорные полосы, по существу, отходят друг от друга, а также поворачиваются наружу, так что в процессе использования происходит освобождение упаковочных блоков.
2. Устройство по п.1, в котором, в целях захвата поддонов, снабженных ячейками, предназначенными, например, для размещения в них яиц или, по существу, сферических фруктов, каждая опорная полоса снабжена опорными концами, причем опорные концы ограничивают принимающие углубления в виде ячеек в опорных полосах.
3. Устройство по п.2, в котором опорные концы могут быть снабжены выступами в форме зубцов, которые доходят до принимающих углублений в виде ячеек.
4. Устройство по пп.1-3, в котором подъемная плита соединяется с опорными полосами посредством четырех соединений штифт-паз, причем прорези выполнены в подъемной плите, а штифты соединяются с опорными полосами.
5. Устройство по п.4, в котором прорези проходят, по существу, горизонтально, в то время как штифты проходят параллельно указанным шарнирам и размещаются на первых концах рычагов, которые другими своими концами соединяются с опорными полосами с сопряжением с их верхними кромками.
6. Устройство по п.1, в котором устройство также содержит на обеих указанных сторонах по меньшей мере одну пружину растяжения, причем каждая натянута с соответствующей стороны между соответствующей захватной пластиной и кромкой захватной рамы.
7. Устройство по п.1, в котором подъемная плита содержит верхнюю плиту, имеющую боковые поверхности, размещенные с обеих противоположных сторон, которая имеет, по существу, форму равнобедренной трапеции, в то время как исполнительный механизм соединяется с верхней плитой.
8. Устройство по п.1, в котором исполнительный механизм содержит поршень с пневматическим приводом.
| СПОСОБ ОБРАБОТКИ СТОЧНЫХ ВОД | 2018 |
|
RU2743954C1 |
| Способ формования изделий из цементогрунтовых смесей | 1980 |
|
SU1013281A1 |
| Устройство для перемещения упаковок | 1986 |
|
SU1391555A1 |
| Грузозахватное устройство | 1987 |
|
SU1532509A1 |

