Настоящее изобретение касается способа и устройства для подачи катушек в машину. Более конкретно настоящее изобретение касается способа и устройства для подачи катушек в машину, например в фасовочно-упаковочную машину для сигарет, к которой относится последующее описание исключительно в качестве примера.
Фасовочно-упаковочные машины для сигарет в настоящее время работают с такими высокими производительностями, что требуют больших количеств упаковочного материала, который частично подается в форме полос, смотанных в катушки. Каждая катушка содержит полосу упаковочного материала, намотанную вокруг бобины, имеющей центральное отверстие и устанавливаемой на размоточный штифт в фасовочно-упаковочной машине. Полосу упаковочного материала разматывают с катушки, от полосы отрезают листы упаковочного материала и сгибают вокруг комплектов сигарет.
Увеличение количества упаковочного материала требуется для того, чтобы соответствовать автоматической обработке катушек с повышенной скоростью подачи катушек в машину, которая в свою очередь требует определение положения катушки для обеспечения возможности манипулятору катушек захватывать катушку посредством захватного элемента и выравнивать катушку с размоточным штифтом на фасовочно-упаковочной машине.
Европейский патент №551854 касается манипулятора, имеющего захватный элемент для захвата катушек с поддона, на котором размещены катушки таким образом, что их оси расположены вертикально. Захватный элемент имеет телевизионную камеру для того, чтобы снимать изображение катушки, и арифметическое устройство для обработки видеоинформации посредством алгоритма, основанного на трансляции и обратном преобразовании изображения, с целью определения координат характеристической точки на катушке. Как только координаты характеристической точки на катушке определены, манипулятор устанавливает захватный элемент в заданное положение для правильного захвата катушки.
Европейский патент 0994057 раскрывает способ и устройство для подачи катушек в машину из магазина катушек, выполненного в виде поддона и расположенного на подъемной платформе вблизи машины. Каждая катушка имеет ось, центральное отверстие, зацепляемое размоточным штифтом на машине, и две плоские внешние поверхности, перпендикулярные упомянутой оси. Для осуществления способа используют манипулятор с захватным элементом и определяют, находится ли, по меньшей мере, одна ориентирующая точка захватного элемента манипулятора на поверхности катушки в магазине, поднимают катушку посредством захватного элемента, когда ориентирующая точка находится на поверхности катушки, и перемещают катушку из захватного элемента к размоточному штифту.
Хотя вышеописанные манипуляторы надежны и способны перемещать большое количество катушек в единицу времени, арифметическое устройство описанных выше манипуляторов для обработки точек в изображении является относительно дорогостоящим.
Техническим результатом настоящего изобретения является создание прямонаправленного дешевого способа подачи катушек в машину, не требующего точного расположения и поднятия катушек из магазина катушек.
Эта цель достигается тем, что при осуществлении способа подачи катушек в машину из расположенного вблизи машины магазина катушек, каждая из которых имеет ось, центральное отверстие, зацепляемое размоточным штифтом на машине, и две плоские внешние поверхности, перпендикулярные оси, регулируют положение захватного элемента, обращенного к одной из плоских внешних поверхностей катушки, осуществляют испускание пучка электромагнитных волн на катушку посредством излучателя, расположенного на захватном элементе, определяют, находится ли, по меньшей мере, одна ориентирующая точка захватного элемента манипулятора, которая является точкой отражения испускаемого пучка, в отверстии катушки в магазине, поднимают катушку посредством захватного элемента, когда ориентирующая точка находится в отверстии катушки, и перемещают катушку от захватного элемента к размоточному штифту.
В способе можно использовать захватный элемент, содержащий приемник, расположенный на первом расстоянии от излучателя, для приема отраженного пучка, когда плоская внешняя поверхность катушки расположена на втором расстоянии от захватного элемента, параллельном оси катушки, а точка отражения расположена на плоской внешней поверхности катушки.
В способе можно использовать приемник, содержащий несколько смежных ячеек, чувствительных к электромагнитным волнам, для приема отраженного пучка, когда плоская внешняя поверхность катушки расположена в пределах заданного диапазона второго расстояния от захватного элемента, а точка отражения находится на плоской внешней поверхности катушки.
В способе можно перемещать захватный элемент параллельно плоской внешней поверхности катушки, когда приемник принимает отраженный пучок. Можно поднимать катушку, когда приемник не принимает отраженный пучок.
В способе можно использовать захватный элемент, содержащий три датчика расстояния, каждый из которых имеет излучатель и приемник и образует соответствующую ориентирующую точку, а захватный элемент захватывает катушку, когда ни один из приемников не принимает соответствующие отраженные пучки.
Можно регулировать положение захватного элемента на втором расстоянии от плоской внешней поверхности катушки или, по меньшей мере, в пределах заданного диапазона второго расстояния и вблизи отверстия катушки.
Можно приводить захватный элемент в соприкосновение с плоской внешней поверхностью катушки. Определяют наличие этого соприкосновения посредством датчика и извлекают захватный элемент перпендикулярно плоской внешней поверхности катушки для расположения захватного элемента на втором расстоянии от плоской внешней поверхности катушки или в пределах заданного диапазона второго расстояния.
Согласно изобретению создано устройство для подачи катушек в машину из расположенного вблизи машины магазина катушек, каждая из которых имеет ось, центральное отверстие, зацепляемое размоточным штифтом на машине, и две плоские внешние поверхности, перпендикулярные оси, содержащее манипулятор, имеющий захватный элемент для захвата катушки из магазина, когда, по меньшей мере, одна ориентирующая точка захватного элемента расположена в отверстии катушки, и излучатель, расположенный на захватном элементе, для испускания пучка электромагнитных волн, направленного на катушку, причем ориентирующая точка является точкой отражения испускаемого пучка.
Устройство может содержать приемник для приема отраженного пучка, когда точка отражения расположена на плоской внешней поверхности катушки, и для отсутствия приема отраженного пучка, когда точка отражения расположена в отверстии катушки. Приемник может быть расположен на первом расстоянии от излучателя, для приема отраженного пучка, когда плоская внешняя поверхность катушки расположена на втором расстоянии от захватного элемента, параллельном оси катушки, а точка отражения находится на плоской внешней поверхности катушки. Приемник может содержать несколько смежных ячеек, чувствительных к электромагнитным волнам, для приема отраженного пучка, когда плоская внешняя поверхность катушки находится в пределах заданного диапазона второго расстояния от захватного элемента, а точка отражения расположена на плоской внешней поверхности катушки.
Устройство может содержать блок управления, команды которого предназначены для перемещения манипулятора, чтобы перемещать захватный элемент параллельно плоской внешней поверхности катушки, когда точка отражения расположена на плоской внешней поверхности катушки. Захватный элемент может содержать кольцеобразную пластину, имеющую всасывающие отверстия для подъема катушки, когда точка отражения расположена в отверстии катушки, а пластина установлена в соприкосновении с плоской внешней поверхностью катушки.
Захватный элемент может содержать три датчика расстояния, каждый из которых имеет излучатель и приемник и которые образуют отдельные соответствующие ориентирующие точки, и захватный элемент приспособлен захватывать катушку, когда все ориентирующие точки расположены в отверстии катушки.
Устройство может содержать платформу для поддержания магазина катушек в заданном положении относительно машины и манипулятора.
Магазин может представлять собой поддон для катушек.
Платформа может содержать подъемное приспособление.
Размоточный штифт может содержать самоцентрирующийся шпиндель.
Самоцентрирующийся шпиндель может содержать конический свободный конец.
Ниже будет описан ряд неограничивающих вариантов осуществления настоящего изобретения посредством варианта выполнения со ссылкой на прилагаемые чертежи, на которых:
фиг.1 изображает вид в перспективе с удаленными для ясности деталями фасовочно-упаковочной машины, имеющей устройство для подачи катушек в соответствии с настоящим изобретением;
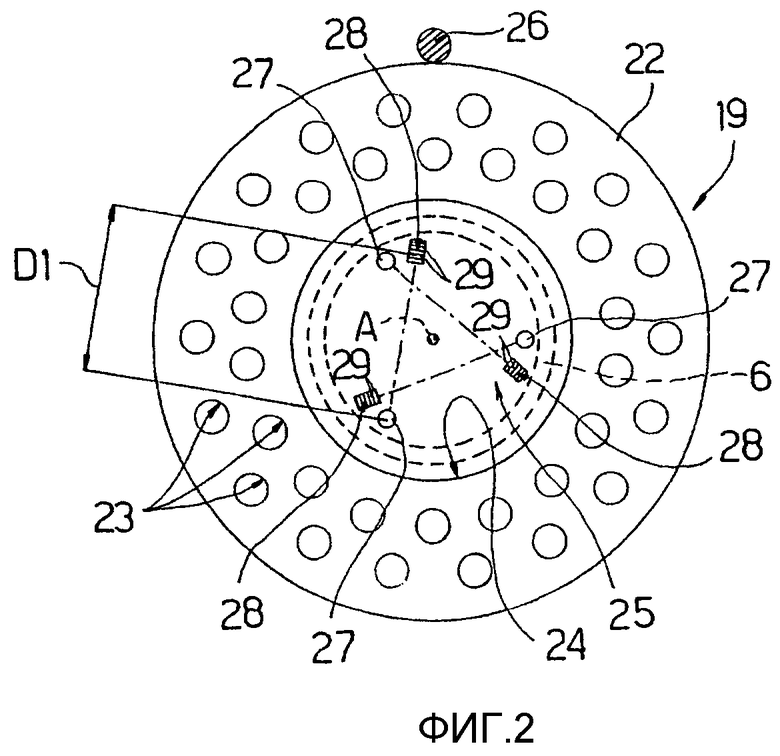
фиг.2 изображает вид снизу в увеличенном масштабе захватного элемента показанного на фиг.1 устройства;
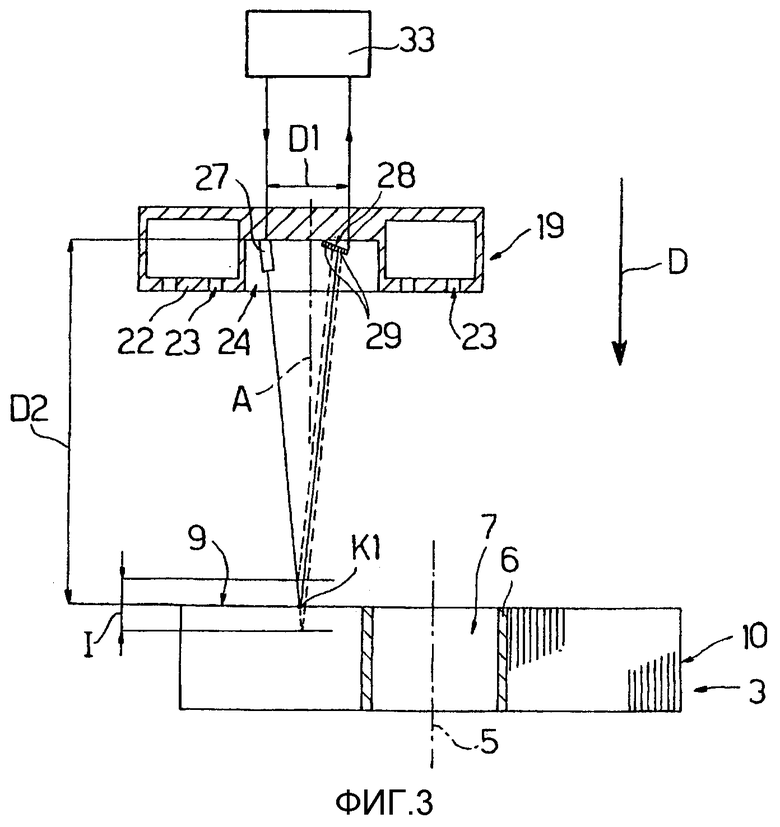
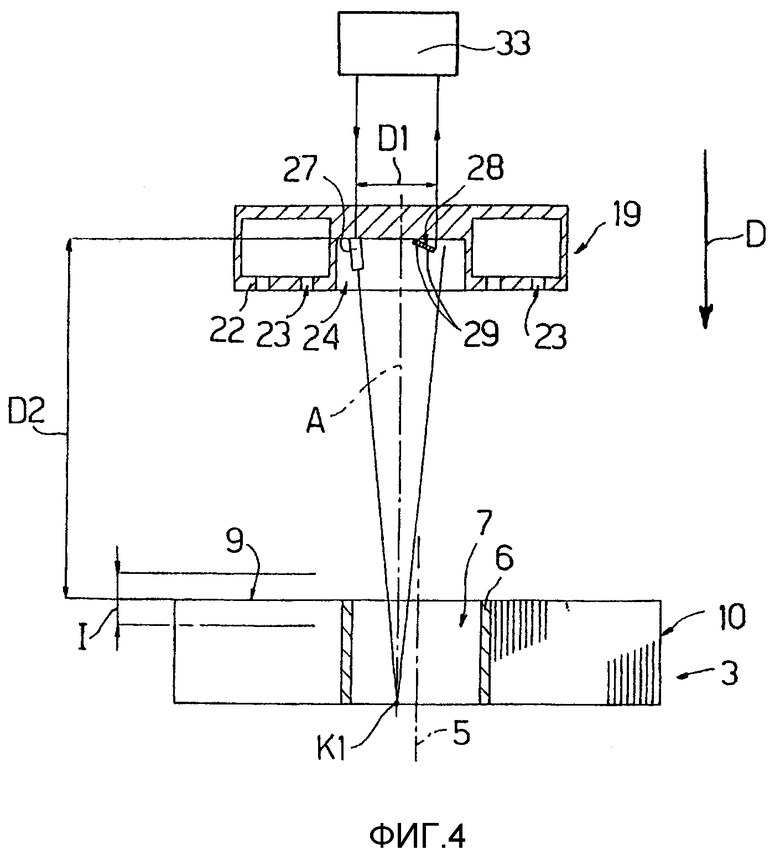
фиг.3 и 4 схематически изображают виды сбоку варианта захватного элемента в двух рабочих положениях относительно катушки;
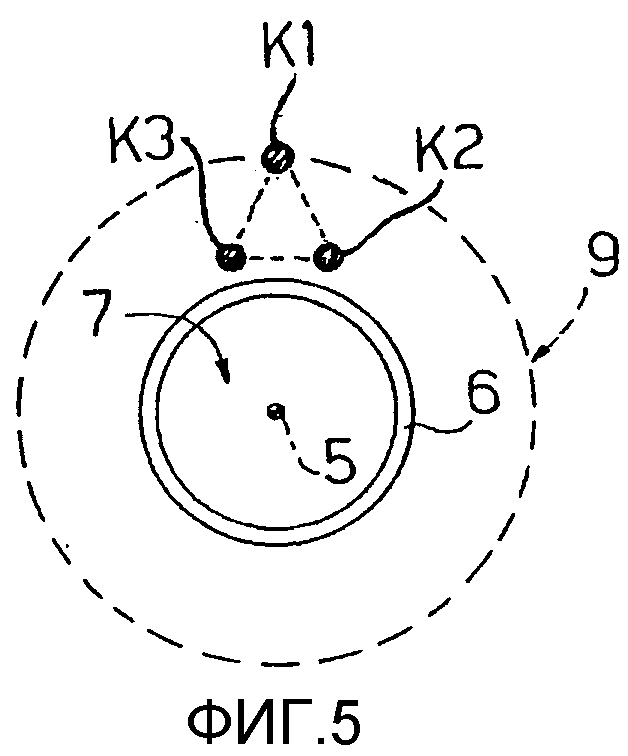
фиг.5-7 изображают схематические виды сверху, показывающие положение захватного элемента показанного на фиг.1 устройства относительно катушки.
Фасовочно-упаковочная машина 1 для сигарет, предназначенная для производства пачек сигарет (не показаны), содержит устройство 2 для подачи катушек 3 и два размоточных штифта 4а и 4b для разматывания катушек 3. Штифт 4а показан в положении, поддерживающем разматываемую катушку 3, а штифт 4b находится в положении для приема катушки 3 от устройства 2 для подачи.
Каждая катушка 3 имеет ось 5 и содержит бобину 6, имеющую отверстие 7, и полосу 8 упаковочного материала, намотанную вокруг бобины 6 так, что она формирует две параллельные, по существу плоские горизонтальные внешние поверхности 9, перпендикулярные оси 5, и по существу цилиндрическую внешнюю поверхность 10, параллельную оси 5.
Машина 1 содержит раму 11, поддерживающую размоточные штифты 4а и 4b, каждый из которых имеет ось 12 и элемент 13 привода для переключения штифтов 4а, 4b между положением разматывания, в котором ось 12 является горизонтальной, и положением приема, в котором ось 12 является вертикальной.
Устройство 2 для подачи катушек 3 содержит манипулятор 14 для манипулирования катушками 3 и платформу 15 для поддержания поддона 16, на котором катушки 3 размещены регулярным образом с соответствующими осями 5, расположенными вертикально. Манипулятор 14 содержит шарнирную руку 17, укрепленную на одном конце рамы 11, чтобы поворачиваться относительно вертикальной оси 18, и поддерживающую на противоположном конце захватный элемент 19 для захвата одной катушки 3 за один раз. Платформа 15 установлена в заданном местоположении относительно машины 1 и содержит подъемное приспособление 20 и установочные элементы 21 для расположения поддона 16 относительно платформы 15.
Захватный элемент 19 является колоколообразным с осью А и, как показано более ясно на фиг.2, содержит кольцеобразную пластину 22, в которой образованы всасывающие отверстия 23, выборочно подсоединяемые к источнику вакуума (не показан), и полость 24, вмещающие три датчика 25 расстояния. Захватный элемент 19 имеет контактный датчик 26, размещенный по кольцеобразной пластине 22 и предназначенный для остановки манипулятора 14, когда захватный элемент 19 соприкасается с катушкой 3.
На фиг.3 показано, что каждый датчик 25 содержит излучатель 27 для испускания пучка электромагнитных волн и приемник 28 для приема пучка электромагнитных волн. Излучатель 27 расположен на расстоянии D1 от приемника 28 и испускает пучок, ориентированный таким образом, что поверхность (внешняя поверхность 9 катушки 3), обращенная параллельно кольцеобразной пластине 22 и на заданном расстоянии D2 от нее, отражает пучок в положение, в котором приемник 28 может принимать отраженный пучок. Расстояние D2 измеряется параллельно оси А и оси 5, а расстояние D1 измеряется перпендикулярно оси А. Приемник 28 образован рядом смежных ячеек 29, чувствительных к электромагнитным волнам, и он может принимать отраженный пучок, когда отражающая поверхность находится в пределах заданного диапазона I (параллельного осям 5 и А) приблизительно на расстоянии D2. На фиг.2 захватный элемент 19 оборудован тремя датчиками 25, излучатели 27 и приемники 28 которых разнесены на равные расстояния относительно оси А полости 24 захватного элемента 19.
На фиг.1 показано, что каждый штифт 4а, 4b содержит удлиняющийся шпиндель 30, имеющий конический свободный конец 31, и три сектора 32, способные перемещаться между закрытым положением, в котором они соприкасаются друг с другом, и открытым положением, в котором они отталкиваются от бобины 6 катушки 3 для удержания катушки 3 в заданном положении относительно оси 12. Когда секторы 32 открыты, ось 5 катушки 3 устанавливается так, что совпадает с осью 12 размоточного штифта. Другими словами, шпиндель 30 является самоцентрирующимся.
Устройство 2 для подачи катушек управляется блоком 33 управления, который обрабатывает сигналы от датчиков 25 и 26 и управляет перемещениями манипулятора 14, подъемного приспособления 20 и штифтов 4а и 4b.
При фактическом применении поддон 16 катушек 3 размещен на платформе 15. Поддоны 16 и катушки 3 имеют стандартный размер, так что расположение катушек 3 на поддоне 16 изменяется в относительно небольших пределах. Следовательно, катушки 3 на поддоне 16, находящемся на платформе 15, расположены с некоторым допуском относительно соответствующих заданных положений, запоминаемых в блоке 33 управления. Для извлечения катушки 3 для подачи в машину 1 манипулятор 14 располагает захватный элемент 19 над одной из катушек 3, положение и высота которой в вертикальном направлении D приблизительно известны. Манипулятор 14 располагает захватный элемент 19 на расстоянии D2 или приблизительно на расстоянии D2 от верхней горизонтальной внешней поверхности 9 катушки 3, как показано на фиг.3 и 4.
При заданных приблизительных положениях катушек 3 захватный элемент 19 может быть установлен в положения фиг.3 или 4, то есть с осью захватного элемента 19, расположенной близко к отверстию 7 в катушке 3 или в этом отверстии. Для простоты и обобщения концепции настоящего изобретения захватный элемент 19, показанный на фиг.3 и 4, оборудован одним датчиком 25 расстояния. Когда захватный элемент 19 расположен над катушкой 3, кольцеобразная пластина 22 поддерживается горизонтально, чтобы она была параллельной горизонтальной внешней поверхности 9 катушки 3. Как показано на фиг.3, излучатель 27 испускает пучок электромагнитных волн, который отражается горизонтальной внешней поверхностью 9 в данной точке К1. Внешняя поверхность 9 расположена в пределах диапазона I расстояния D2, позволяющего приемнику 28 принимать отраженный пучок, при этом отраженный пучок попадает на одну из ячеек 29 приемника 28, передающую сигнал в блок 33 управления, который, в свою очередь, определяет местоположение точки К1 отражения на горизонтальной внешней поверхности 9 катушки 3. Когда точка К1 отражения расположена на внешней поверхности 9, захватный элемент 19 и катушка 3 не выровнены достаточно, чтобы гарантировать, что катушка 3 будет расположена на размоточном штифте 4а, 4b правильно, так что захватный элемент 19 перемещается относительно его начального положения в направлении, перпендикулярном направлению D. При каждом перемещении датчик 25 определяет, находится ли точка К1 отражения на горизонтальной внешней поверхности 9 или в отверстии 7. Когда пучок входит в отверстие 7, точка К1 отражения может быть расположена на основании под катушкой 3 или вдоль внутренней поверхности бобины 6. В любом из этих случаев, когда пучок входит в отверстие 7, отраженный пучок не попадает в приемник 28 из-за того, что отражающая поверхность не находится в пределах диапазона I расстояния D2, так что отсутствие принимаемого сигнала приемником 28 в сочетании с сигналом, излучаемым излучателем 27, указывает на то, что захватный элемент 19 правильно выровнен с катушкой 3 или, по меньшей мере, выровнен достаточно для гарантирования правильного перемещения катушки 3 от захватного элемента 19 к размоточному штифту 4а, 4b.
Манипулятор 14 опускает захватный элемент 19 к катушке 3 в направлении D до тех пор, пока датчик 26 не обнаруживает, что пластина 22 соприкасается с горизонтальной внешней поверхностью 9, затем всасывающие отверстия 23 подсоединяются к источнику вакуума, и катушка 3 поднимается для перемещения к штифту 4b, захватный элемент 19 и катушка 3 располагаются над штифтом 4b так, чтобы ось А элемента 19 была выровнена с осью 12 штифта 4b, захватный элемент 19 опускается на штифт 4b в направлении D так, что штифт 4b зацепляет отверстие 1, даже если ось 5 катушки 3 не идеально выровнена со штифтом 4b, благодаря коническому свободному концу 31 шпинделя 30, захватный элемент 19 отпускает катушку 3, а шпиндель 30 удлиняется так, чтобы ось 5 катушки 3 совпала с осью 12 размоточного штифта 4b.
Другими словами, прежде, чем поднять катушку 3, выполняется проверка с целью определения, находится ли ориентирующая точка К1 захватного элемента 19 в отверстии 7 катушки 3. Очевидно, что чем больше имеется опорных точек, тем более точно и более быстро определяется отверстие 7 катушки 3.
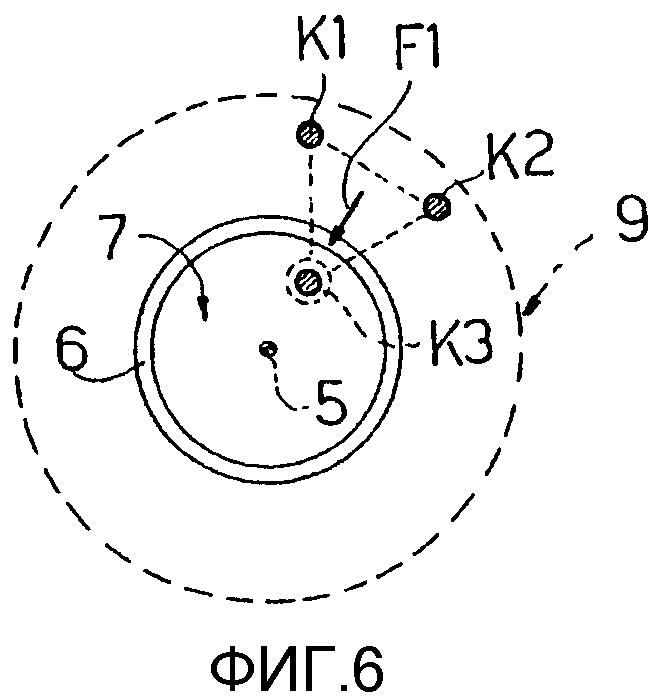
На фиг.5, 6 и 7 схематически показан случай, при котором захватный элемент 19 содержит три датчика 25 расстояния, как на фиг.2. На фиг.5 три отдельные точки K1, K2, К3 отражения расположены на горизонтальной внешней поверхности 9 катушки 3, что является эквивалентным ситуации фиг.3, так что для определения местоположения отверстия 7 требуется ряд перемещений относительно начального положения. Это может привести к ситуации, показанной на фиг.6, при которой две точки K1 и K2 расположены на горизонтальной внешней поверхности 9, а точка К3 расположена в отверстии 7, и поэтому приемником 28 не воспринимается. Однако блоку 33 управления известно гипотетическое положение точки К3, и он отдает команду на перемещение в направлении стрелки F1, то есть к точке К3, также переводя точки K1 и K2 внутрь отверстия 7.
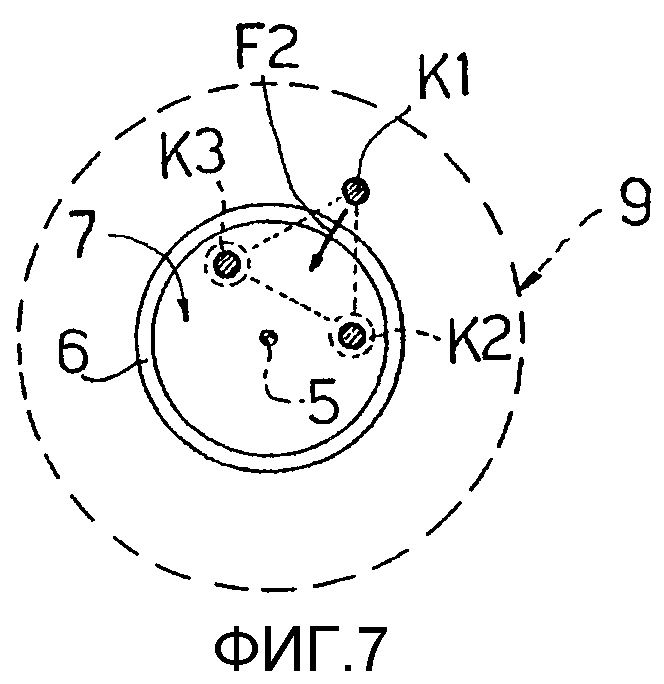
В качестве альтернативы, как показано на фиг.7, одна точка K1 может быть расположена на горизонтальной внешней поверхности 9 катушки 3, а точки K2 и КЗ - внутри отверстия 7. В этом случае манипулятор 14 перемещает захватный элемент 19 в направлении, перпендикулярном линии, соединяющей гипотетические точки К2 и К3, и в направлении стрелки F2 до тех пор, пока точка К1 также не окажется в отверстии 7.
В одном варианте блоку 33 управления не известна высота катушек 3 в направлении D, а только приблизительное расположение катушек 3 в плоскости, перпендикулярной направлению D, так, чтобы при расположении над катушкой 3, захватный элемент 19 опускался в соприкосновение с катушкой 3, и, когда датчик 26 показывает соприкосновение между захватным элементом 19 и катушкой 3, захватный элемент 19 устанавливается на расстоянии D2 или в пределах диапазона относительно расстояния D2, чтобы эффективно определить местоположение захватного элемента 19 относительно катушки 3, как в предыдущем случае.
Способ и устройство согласно настоящему изобретению имеют преимущество в том, что для них требуется только обработка сравнительно небольшого количества элементов данных.
Когда положение захватного элемента 19 относительно катушки 3 определяется с использованием только одной ориентирующей точки К1, катушка 3 центрируется на размоточном штифте 4а или 4b с помощью удлиняющегося шпинделя 30. Когда положение захватного элемента 19 относительно катушки 3 определяется с использованием трех опорных точек K1, K2, К3, ось А захватного элемента 19 может быть выровнена с осью 5 катушки 3 посредством простого выбора трех опорных точек K1, K2, К3, расположенных на расстоянии D2 от отражающей поверхности, вдоль гипотетической окружности немного меньшего диаметра, чем у отверстия 1, так что катушка 3 перемещается на штифт 4а или 4b без необходимости центрирования с помощью самоцентрирующегося шпинделя 30. В дополнительном варианте, не показанном, такой же результат, как с тремя опорными точками, также может быть достигнут с помощью только двух разделенных, на расстоянии D2 от отражающей поверхности, на расстояние, слегка меньшее, чем диаметр отверстия катушки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Линия формования жестких катушек электрических машин | 1991 |
|
SU1823086A1 |
| Устройство для автоматической сборки катушки с сердечниками | 1985 |
|
SU1255356A1 |
| РАЗМАТЫВАТЕЛЬ КАТУШЕК С РУЛОННЫМ МАТЕРИАЛОМ | 2012 |
|
RU2602193C2 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО | 2019 |
|
RU2762223C2 |
| РАЗЛИВОЧНАЯ МАШИНА И СПОСОБ ЭКСПЛУАТАЦИИ РАЗЛИВОЧНОЙ МАШИНЫ | 2011 |
|
RU2561924C2 |
| ГЕРМЕТИЧНЫЙ ПЕНАЛ ХРАНЕНИЯ АМПУЛ С ПУЧКАМИ ОТРАБОТАВШИХ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 2012 |
|
RU2500045C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ВЫСОКОТОЧНОГО ИЗМЕРЕНИЯ ФИЗИКО-ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ОБЪЕКТА | 2007 |
|
RU2353925C1 |
| СВЕТОВОД ДЛЯ ИЗМЕНЕНИЯ ПАТТЕРНА РАСПРЕДЕЛЕНИЯ СВЕТА | 2014 |
|
RU2645250C2 |
| УСТРОЙСТВО КОНТРОЛЯ И УПРАВЛЕНИЯ С ВЫБОРКОЙ ДАННЫХ, ПОСТУПАЮЩИХ В РЕАЛЬНОМ ВРЕМЕНИ, ДЛЯ УСТАНОВКИ, ИСПОЛЬЗУЕМОЙ В КАБЕЛЬНОЙ ПРОМЫШЛЕННОСТИ | 1998 |
|
RU2194817C2 |
| СПОСОБ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ НА АСТЕРОИДЕ С ПОМОЩЬЮ ИСКУССТВЕННОГО ОСВЕЩЕНИЯ | 2014 |
|
RU2586437C1 |
Устройство для подачи катушек содержит манипулятор, имеющий захватный элемент для захвата одной катушки из поддона и перемещения катушки к размоточному штифту на машине, причем захватный элемент может захватывать катушку из поддона, когда, по меньшей мере, одна опорная точка захватного элемента расположена в центральном отверстии катушки. 2 н. и 18 з.п. ф-лы, 7 ил.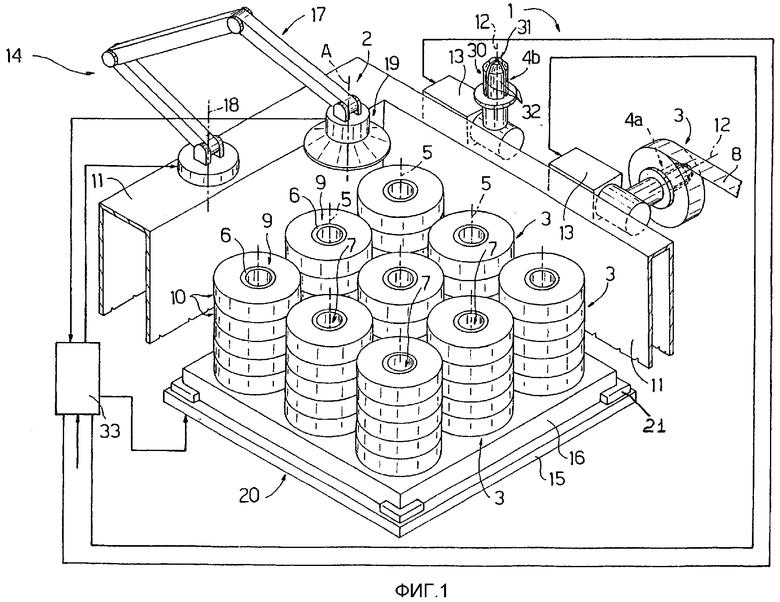
| Центробежный классификатор | 1981 |
|
SU994057A2 |
| US 4723884 A, 09.02.1988 | |||
| ЕР 0551854 А2, 21.07.1993 | |||
| Способ получения производных фталазона или их солей | 1972 |
|
SU577986A3 |
| DE 19708552 A1, 10.09.1998 | |||
| Многопозиционный вакуумный захват | 1988 |
|
SU1662844A1 |
| Захват промышленного робота | 1980 |
|
SU944920A1 |

