Предлагаемое изобретение относится к области машиностроения. В частности, механизмы свободного хода используют в импульсных вариаторах, инерционных трансформаторах вращающего момента, приводах стартеров, гидротрансформаторах, металлорежущих станках, приводах топок, подъемно-транспортных машинах и т.д.
Наиболее распространенным способом создания механизмов свободного хода является использование сил трения, с помощью которых усилие в заклиненном состоянии передается от ведущих элементов к ведомым. К этому классу механизмов свободного хода, называемых фрикционными, относятся широко применяемые роликовые механизмы свободного хода [Леонов А.И. Микрохраповые механизмы свободного хода. - М.: Машиностроение, 1982 - стр.42]. В России, например, роликовые механизмы используют в приводах стартеров компании ГАЗ и ВАЗ. Способ реализации механизмов свободного хода на основе сил трения определяет и основной недостаток фрикционных механизмов. Силы трения могут быть созданы только с помощью нормальных сил. В случае предельного состояния равновесия согласно закону механики нормальная сила равна

Коэффициент трения f стали по стали при наличии смазки составляет несколько сотых, и нормальная сила по крайней мере на порядок превышает силу трения. Таким образом, основной недостаток фрикционных механизмов свободного хода заключается в появлении в механизме нормальных сил, не участвующих непосредственно в передаче момента и значительно, на порядок и больше, превышающих силы трения, осуществляющие рабочий процесс. Появление этих сил приводит к значительному увеличению контактных напряжений и к снижению долговечности фрикционных механизмов свободного хода.
Этот принципиальный недостаток фрикционных механизмов свободного хода устраняется в нефрикционных механизмах, например в храповых [Леонов А.И. Микрохраповые механизмы свободного хода. - М.: Машиностроение, 1982] (фиг.1). В них момент от обоймы 1 к храповику 3 передается с помощью собачек 2, упирающихся в зубья храповика 3, то есть с помощью нормальных сил, что позволяет значительно снизить напряжения в местах контакта собачек с храповиком.
Однако храповой механизм, представленный на фиг.1, имеет существенные недостатки. Основной недостаток - использование жестких собачек 2. Из-за неточностей изготовления деталей механизма в каждый момент заклинивается и передает усилие, как правило, одна жесткая собачка.
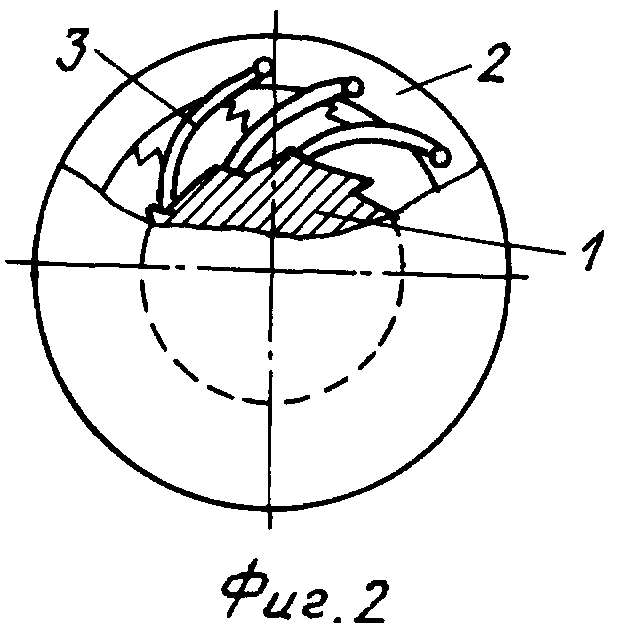
Прототипом предлагаемого изобретения является механизм свободного хода с упругими криволинейными пластинами (собачками) 3, в котором устраняется этот недостаток [Леонов А.И. Микрохраповые механизмы свободного хода. - М.: Машиностроение, 1982 - стр.29] (фиг.2). В этой конструкции при повороте храповика 1 по часовой стрелке криволинейные пластины 3 попеременно включаются и передают крутящий момент обойме 2. Если, например, криволинейная пластина 3 первой заклинилась (уперлась в зуб храповика 1), то храповик продолжает поворот по часовой стрелке, деформируя (изгибая) эту криволинейную пластину. Далее заклинивается криволинейная пластина, конец которой находится ближе всего к впадине своего зуба по сравнению с другими незаклиненными пластинами и т.д. При повороте храповика 1 против часовой стрелки криволинейные пластины выходят из зацепления и при дальнейшем вращении храповика проскакивают по зубьям, не передавая крутящий момент обойме (совершая свободный ход механизма).
К недостаткам прототипа (фиг.2) следует отнести случайный характер включения криволинейных пластин при заклинивании. Вполне вероятно включение нескольких пластин с одной стороны храповика, что будет означать неравномерную (одностороннюю) нагрузку на храповик 1 и обойму 2 и соответственно на подшипники вала храповика и обоймы. Возможно такое расположение криволинейных пластин, когда поворот храповика относительно обоймы при заклинивании будет близок углу, соответствующему одному шагу храповика (расстоянию между двумя соседними вершинами зубьев). Это приведет к ударной нагрузке в момент включения механизма.
Техническим эффектом, достигаемым предлагаемым изобретением, является снижение ударных нагрузок при контакте криволинейных пластин с зубьями храповика и неравномерных (односторонних) нагрузок на храповик и обойму. Это позволяет повысить долговечность механизма свободного хода или при необходимости уменьшить его габариты.
Технический эффект достигается тем, что в храповом механизме (фиг.3), содержащем храповик, обойму, в которой крепятся оси упругих криволинейных пластин, поджимаемых пружинами к храповику, упругие криволинейные пластины разбиты на два равных по количеству пластин пакета, смещенных друг относительно друга на величину, обеспечивающую при заклинивании механизма попеременное включение криволинейных пластин то из одного, то из другого пакета, а концы криволинейных пластин в пакетах также равномерно смещены один относительно другого по полкам зубьев.
На чертеже (фиг.3) представлена конструкция предложенного храпового механизма свободного хода, где 1 - храповик, 2 - обойма, 3 - пружина, поджимающая криволинейную пластину к храповику, 4 - вторая криволинейная упругая пластина первого пакета, 5 - первая криволинейная упругая пластина первого пакета, 6 - первая криволинейная упругая пластина второго пакета.
Первый пакет включает n/2 первых по порядку пластин (n - количество криволинейных пластин механизма), расположенных справа от осевой линии, второй - n/2 следующих пластин (слева от осевой линии). В каждом из пакетов концы любых двух соседних криволинейных пластин 4 и 5 смещены один относительно другого на величину  ,
,
где S - шаг храповика.
Если, например, первая пластина 5 первого пакета находится во впадине своего зуба, то вторая пластина 4 первого пакета смещена от впадины своего зуба на величину
 ,
,
следующая пластина смещена на величину 2h и т.д. Благодаря такому равномерному распределению пластин в пакетах свободный ход при заклинивании механизма сводится к минимуму и не превышает угла поворота храповика, соответствующего h/r, где r - радиус храповика. Это обеспечивает минимальные ударные нагрузки при заклинивании механизма.
В свою очередь, расположение пакетов друг относительно друга таково, что конец первой пластины 6 второго пакета отстоит от впадины своего зуба на величину  (фиг.3), в то время как конец первой пластины 5 первого пакета находится во впадине своего зуба. Аналогичным оказывается смещение вторых пластин обоих пакетов друг относительно друга и т.д.
(фиг.3), в то время как конец первой пластины 5 первого пакета находится во впадине своего зуба. Аналогичным оказывается смещение вторых пластин обоих пакетов друг относительно друга и т.д.
Процесс заклинивания механизма при заданном расположении пластин в пакетах и пакетов друг относительно друга будет происходить следующим образом. Допустим, первой включилась первая пластина 5 первого пакета. При дальнейшем повороте обоймы 2 против часовой стрелки следующей включится первая пластина второго пакета 6, находящаяся с противоположной стороны храповика 1, так как ее конец расположен ближе к впадине своего зуба (h1<h), чем у оставшихся пластин. Затем включается вторая пластина 4 первого пакета и т.д. Тем самым резко снижается односторонняя нагрузка на храповик, обойму и подшипники. При свободном ходе механизма криволинейные пластины поджимаются к храповику 1 пружинами 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| ХРАПОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2002 |
|
RU2221943C2 |
| ХРАПОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 1991 |
|
RU2008542C1 |
| ХРАПОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2010 |
|
RU2439389C1 |
| МИКРОХРАПОВЫЙ МЕХАНИЗМ ДЛЯ ВЫСОКОСКОРОСТНЫХ ИНЕРЦИОННЫХ ТРАНСФОРМАТОРОВ | 2002 |
|
RU2224153C2 |
| Храповой механизм свободного хода | 1989 |
|
SU1723389A1 |
| БЛОК ХРАПОВЫХ МЕХАНИЗМОВ СВОБОДНОГО ХОДА | 2002 |
|
RU2243428C2 |
| ХРАПОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА С СИММЕТРИЧНЫМ ЗАЦЕПЛЕНИЕМ | 2004 |
|
RU2258845C1 |
| Буровая установка с автоматическим выбором режимов бурения | 1980 |
|
SU968290A1 |
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 2009 |
|
RU2424454C1 |
| ХРАПОВЫЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2008 |
|
RU2382249C2 |

Предлагаемое изобретение относится к области машиностроения, а именно к храповым механизмам свободного хода. Храповой механизм свободного хода включает храповик, обойму, в которой крепятся оси криволинейных пластин или собачек, поджимаемых пружинами к храповику. Упругие криволинейные пластины разбиты на два равных по количеству пластин пакета, смещенных один относительно другого на величину, обеспечивающую при заклинивании механизма попеременное включение криволинейных пластин то из одного, то из другого пакета. Криволинейные пластины в пакетах, в свою очередь, также равномерно смещены одна относительно другой по полкам зубьев. Решение направлено на снижение ударных нагрузок в момент заклинивания механизма свободного хода и, соответственно, увеличение долговечности механизма. 3 ил.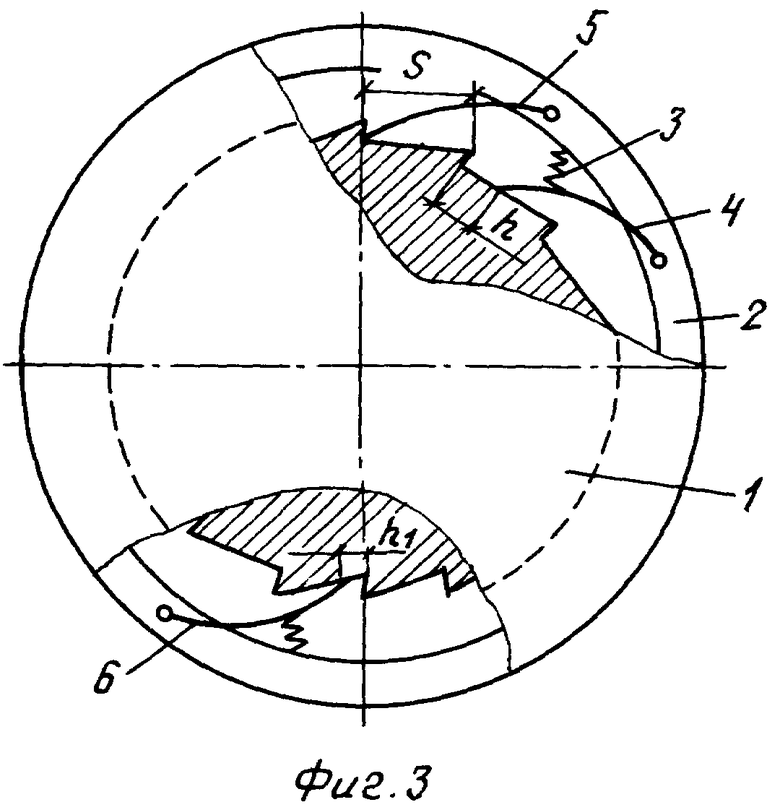
Храповой механизм свободного хода, содержащий обойму, в которой крепятся оси упругих криволинейных пластин (собачек), храповик, пружины, поджимающие криволинейные пластины к храповику, отличающийся тем, что криволинейные пластины (собачки) разбиты на два одинаковых по количеству пластин пакета, смещенных относительно друг друга на величину, обеспечивающую при заклинивании механизма попеременное включение криволинейных пластин то из одного, то из другого пакета, а концы криволинейных пластин в пакетах также равномерно смещены один относительно другого по полкам зубьев.
| ХРАПОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 1997 |
|
RU2138707C1 |
| Храповой механизм свободного хода | 1984 |
|
SU1416771A1 |
| EP 1862690 A1, 05.12.2007 | |||
| JP 9210101 A, 12.08.1997. | |||

