Область техники, к которой относится изобретение
Настоящее изобретение относится к области вибрационных гироскопов, принцип работы которых основан на эффекте Кориолиса. Более конкретно, настоящее изобретение касается точности измерений, осуществляемых при помощи гироскопа такого типа.
Уровень техники
Известны методики использования таких вибрационных гироскопов в инерциальных системах, применяемых в навигации, как, например, в случае гироскопического компаса, выполненного с возможностью измерения величины угла отклонения от эталонного направления, которое совпадает с направлением на географический Север (т.е. курса).
Гироскопы, относящиеся к типу осесимметричных кориолисовых вибрационных гироскопов (CVG от английского «Coriolis Vibratory Gyroscope»), например, такие как гироскопы с полусферическим резонатором (HRG от английского «Hemispherical Resonator Gyroscope»), или, в более общем случае, так называемые гироскопы I типа, описанные, например, в публикации «Type I and Type II micromachined vibratory gyroscopes», Andrei M. Shkel, Institute of Electrical and Electronics Engineers/Institute of Navigation' PLANS 2006, San Diego, CA, USA, стр.586-593, работают в режиме без обратной связи и позволяют измерять абсолютное значение угла поворота путем измерения угла, соответствующего геометрическому положению вибрации гироскопа относительно измерительных электродов.
Такой гироскоп также может быть использован и в режиме с обратной связью с управлением геометрическим положением вибрации путем управления прецессией, как описано, в частности, в патентной публикации FR 2755227.
В таком случае, геометрическое положение вибрации гироскопа удерживают в неподвижном положении, и измеряемое значение получают из величины управляющего сигнала, который необходимо приложить к гироскопу для сохранения такого неизменного геометрического положения вибрации. Такой принцип работы также называют «гирометрической обратной связью».
При использовании таких вибрационных гироскопов, как в режиме без обратной связи, так и в режиме с обратной связью, получаемые с их помощью результаты измерений могут содержать ошибки, зависящие в основном от положения вибрации относительно измерительных электродов. Поэтому величина таких ошибок изменяется в зависимости от геометрического положения вибрации, что приводит к снижению точности измеренных таким образом значений. Следовательно, существует потребность в уменьшении величины таких ошибок с целью улучшения рабочих характеристик гироскопов данного типа.
Раскрытие изобретения
Задача, на решение которой направлено настоящее изобретение, состоит в устранении указанных недостатков.
В соответствии с первым аспектом изобретения предлагается способ гироскопических измерений, проводимых гироскопической системой, содержащей вибрационный гироскоп с вибрацией в исходном первом геометрическом положении вибрации, формирующий сигнал измерений;
в котором на вибрационный гироскоп в течение определенного временного периода подают периодический управляющий сигнал, обеспечивающий:
- поворот геометрического положения вибрации в первом направлении в течение части временного периода с изменением положения вибрации указанного гироскопа от первого геометрического положения вибрации ко второму геометрическому положению вибрации в соответствии с первым скоростным профилем; и
- поворот геометрического положения вибрации во втором направлении, противоположном первому направлению, в течение оставшейся части временного периода с изменением положения вибрации указанного гироскопа от второго геометрического положения вибрации к первому геометрическому положению вибрации в соответствии со вторым скоростным профилем;
причем указанный управляющий сигнал имеет нулевое среднее значение за указанный временной период, а первый и второй скоростные профили задают изменение скорости изменения геометрического положения вибрации как функцию от времени;
причем результаты измерений, произведенных гироскопической системой, получают на основе скорректированного сигнала, соответствующего изменению значений геометрического положения вибрации и полученного путем вычитания управляющего сигнала из сигнала измерений, сформированного гироскопом.
В соответствии с одним из вариантов осуществления настоящего изобретения гироскопическая система содержит вибрационный гироскоп, который передает сигнал измерений, соответствующий изменению его геометрического положения вибрации в зависимости от времени.
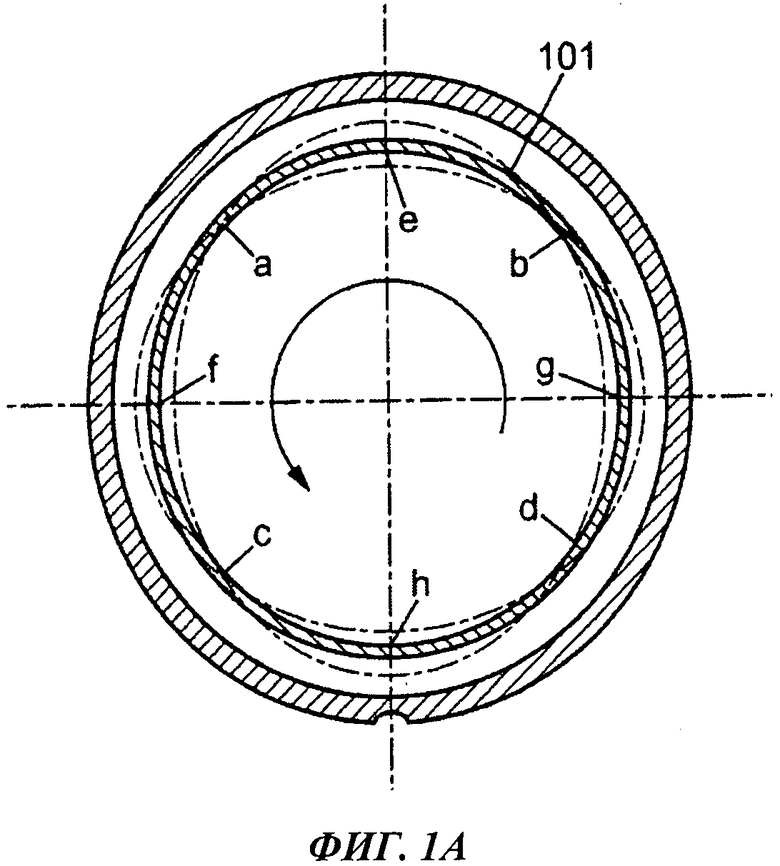
Термин «геометрическое положение вибрации» в применении к гироскопу обозначает здесь положение стоячей волны. Фиг.1-А иллюстрирует такую стоячую волну.
Представленная на чертеже волна имеет четыре узла а, b, с, d и четыре пучности е, f, g, h, расположенные по периферии полусферического резонатора 101. Четыре узла и четыре пучности расположены поочередно и равномерно и разделены угловыми расстояниями, равными сорока пяти градусам. Узлы представляют собой точки стоячей волны, в которых смещение минимально, а пучности представляют собой точки стоячей волны, в которых смещение максимально. Работа гироскопа с полусферическим резонатором требует точного слежения за перемещениями стоячей волны, что, в свою очередь, вызывает потребность в точном определении положения ее узлов и пучностей.
Положение такой стоячей волны, или же геометрическое положение вибрации гироскопа, может быть повернуто так, что проиллюстрированные узлы и пучности не будут находиться в представленных положениях, но будут сдвинуты.
В предпочтительном варианте на такой вибрационный гироскоп в течение некоторого временного периода подают периодический управляющий сигнал, предназначенный для поворота геометрического положения вибрации гироскопа в первом направлении в течение части временного периода и в соответствии с первым скоростным профилем, а затем - в противоположном направлении и в соответствии со вторым скоростным профилем. Таким образом, сигнал измерений, передаваемый вибрационным гироскопом, основан на измерениях, произведенных в разных геометрических положениях вибрации, так, что ошибки измерений, связанные с геометрическими положениями вибрации гироскопа, могут быть устранены или же усреднены. Кроме того, из такого сигнала измерений, переданного вибрационным гироскопом, необходимо вычесть периодический управляющий сигнал, который подавался на гироскоп, чтобы получить в итоге скорректированные результаты гироскопических измерений.
В течение некоторого временного периода периодический управляющий сигнал может соответствовать изменению геометрического положения вибрации в первом направлении, от первого ко второму геометрическому положению вибрации, причем такое изменение геометрического положения вибрации происходит в соответствии с первым скоростным профилем, а затем - изменению геометрического положения вибрации во втором направлении, от второго к первому геометрическому положению вибрации, причем такое изменение положения происходит в соответствии со вторым скоростным профилем. Каждый из таких скоростных профилей определяет как функцию от времени изменение скорости вращения, применяемое к геометрическому положению вибрации через управляющий сигнал по одному из вариантов осуществления настоящего изобретения.
В соответствии с одним из вариантов осуществления настоящего изобретения второй скоростной профиль представляет собой обращение во времени первого скоростного профиля. Таким образом, подаваемый управляющий сигнал симметричен по обе стороны от середины соответствующего ему временного периода.
В одном из вариантов осуществления изобретения может быть предусмотрено, что первая и вторая части временного периода идентичны.
В одном из вариантов осуществления изобретения сигнал измерений гироскопа и управляющий сигнал выражены в виде результатов измерений, произведенных гироскопической системой, и могут быть выражены в виде значений угла либо значений угловой скорости. В таком случае, в оптимальном варианте отсутствует необходимость в интегрировании данного сигнала перед вычитанием управляющего сигнала из сигнала измерений.
Благодаря таким признакам результаты измерений, проводимых при помощи гироскопической системы с вибрационным гироскопом, в оптимальном варианте могут быть основаны на сигнале измерений, передаваемом вибрационным гироскопом, геометрическое положение вибрации которого изменяется в соответствии с первым и вторым скоростными профилями.
В одном из вариантов осуществления настоящего изобретения результаты измерений, производимых гироскопической системой, соответствуют значениям угловой скорости, причем каждое из значений угловой скорости получают путем деления разности между двумя значениями геометрического положения вибрации скорректированного сигнала, разделенными целым числом временных периодов, на длительность промежутка времени, соответствующего данному целому числу временных периодов.
Таким образом возможно получить значения результатов гироскопических измерений, не только свободные от ошибок, связанных с геометрическими положениями вибрации вибрационного гироскопа, но и не содержащие ошибок, связанных с разницей между масштабными коэффициентами сигнала измерений и управляющего сигнала на протяжении полного периода. На протяжении неполного периода сигнал, получаемый в результате вычитания одного сигнала из другого, может содержать ошибку, называемую ошибкой масштабного коэффициента (прецессии). В данном контексте такая ошибка масштабного коэффициента может быть вызвана тем, что скорректированный сигнал по-прежнему содержит остаточные следы управляющего сигнала или же содержит остаточный управляющий сигнал.
Вычисление разности между двумя геометрическими положениями вибрации вибрационного гироскопа, разделенными во времени целым числом периодов управляющего сигнала, позволяет свести ошибки, связанные с масштабным коэффициентом, к нулю. Затем, делением такой разности геометрических положений вибрации на длительность временного периода, разделяющего данные два положения, получают значение угловой скорости, не содержащее ошибки масштабного коэффициента.
В соответствии с одним из вариантов осуществления настоящего изобретения результаты измерений, производимых гироскопической системой, получают в результате дополнительной фильтрации скорректированного сигнала при помощи фильтра низких частот.
Такая фильтрация скорректированного сигнала также обеспечивает возможность устранения ошибок масштабного коэффициента, которые могут присутствовать в скорректированном сигнале. Действительно, при рассмотрении скорректированного сигнала на достаточно длительном временном периоде остаточный управляющий сигнал можно рассматривать как сигнал высокой частоты относительно скорректированного сигнала, который, следовательно, может быть отфильтрован при помощи фильтра низких частот. Достаточно длительным временным периодом можно считать временной период, соответствующий, например, двадцати или более периодам управляющего сигнала.
Таким образом, в вышеописанном контексте в оптимальном варианте для осуществления измерений при помощи гироскопической системы может быть предусмотрена подача периодического сигнала в течение временного интервала, достаточно длительного для того, чтобы управляющий сигнал можно было считать высокочастотным относительно сигнала измерений вибрационного гироскопа.
Затем, после проведения фильтрации при помощи фильтра низких частот, результаты гироскопических измерений могут быть получены в соответствии с одним из вариантов осуществления изобретения на основе отфильтрованного скорректированного сигнала с учетом скользящего временного окна, ширина которого, по меньшей мере, равна длительности вышеописанного временного интервала.
В данной конфигурации до получения результатов измерений, производимых гироскопической системой, может быть предусмотрен минимальный временной период ожидания, обеспечивающий возможность фильтрации остаточного управляющего сигнала, который представляет собой высокочастотный сигнал по сравнению со скорректированным сигналом. Такой минимальный временной период в оптимальном варианте определяют в зависимости от периодичности применяемого управляющего сигнала. Действительно, такой минимальный временной период может быть определен так, чтобы управляющий сигнал можно было считать высокочастотным по сравнению с сигналом измерений, передаваемым вибрационным гироскопом.
Период и постоянная скорость управляющего сигнала могут быть определены так, чтобы первое и второе геометрические положения вибрации вибрационного гироскопа были отделены одно от другого угловым расстоянием в 2π/kN радиан,
где N- частотная мода вибрации вибрационного гироскопа,
a k - целое положительное число, определяемое в зависимости от порядка устраняемых ошибок.
Предусмотренное таким образом сканирование угловой амплитуды геометрического положения вибрации вибрационного гироскопа позволяет скорректировать ошибки различных порядков, связанные с геометрическим положением вибрации гироскопа, т.к. такие ошибки, по существу, удовлетворяют следующему уравнению:

где θ - значение (угла) геометрического положения вибрации;
а n - целое число.
Так, например, для k, равного 1, и N, равного 2, возможно скорректировать ошибки всех порядков. В общем случае, возможно усреднить ошибки, порядок которых соответствует значениям n, большим или равным k.
Действуя таким образом, в итоге получают скорректированный сигнал на основе сигнала измерений вибрационного гироскопа, от которого отфильтровывают связанный с масштабным коэффициентом остаточный управляющий сигнал, представляющий собой высокочастотный сигнал, который вызывает поворот геометрического положения гироскопа, как описано выше. На основе данного скорректированного и отфильтрованного сигнала в оптимальном варианте возможно произвести усреднение ошибок измерений, связанных с геометрическим положением вибрационного гироскопа. Таким образом, обеспечена практическая возможность сведения таких ошибок к нулю.
В соответствии со вторым аспектом настоящего изобретения предлагается гироскопическая система, содержащая средства, выполненные с возможностью применения способа для проведения измерений по одному из вариантов осуществления настоящего изобретения.
Такая гироскопическая система может содержать:
- вибрационный гироскоп с вибрацией в исходном первом геометрическом положении вибрации, формирующий сигнал измерений;
- управляющий модуль, выполненный с возможностью подачи в течение определенного временного периода периодического управляющего сигнала, обеспечивающего:
- поворот геометрического положения вибрации в первом направлении в течение части временного периода с изменением положения вибрации указанного гироскопа от первого геометрического положения вибрации ко второму геометрическому положению вибрации в соответствии с первым скоростным профилем; и
- поворот геометрического положения вибрации во втором направлении, противоположном первому направлению, в течение оставшейся части временного периода с изменением положения вибрации указанного гироскопа от второго геометрического положения вибрации к первому геометрическому положению вибрации в соответствии со вторым скоростным профилем,
причем управляющий сигнал имеет нулевое среднее значение за указанный временной период, а первый и второй скоростные профили задают изменение скорости изменения геометрического положения вибрации как функцию от времени;
и
- обрабатывающий модуль, выполненный с возможностью формирования скорректированного сигнала, соответствующего изменению значений геометрического положения вибрации и получаемого путем вычитания управляющего сигнала из сигнала измерений, сформированного вибрационным гироскопом.
Второй скоростной профиль может представлять собой обращение во времени первого скоростного профиля.
Система может дополнительно содержать вычислительный модуль, предусмотренный на выходе обрабатывающего модуля, выполненный с возможностью выдачи результатов гироскопических измерений, соответствующих значениям угловой скорости, причем каждое из значений угловой скорости представляет собой результат деления разности между двумя значениями геометрического положения вибрации скорректированного сигнала, разделенными целым числом временных периодов, на длительность временного промежутка, соответствующего такому целому числу временных периодов.
Система также может содержать фильтр низких частот, предусмотренный на выходе обрабатывающего модуля, выполненный с возможностью фильтрации высокочастотных составляющих скорректированного сигнала.
В данной гироскопической системе временной период и постоянная скорость управляющего сигнала могут быть определены так, чтобы первое и второе геометрические положения вибрации отстояли одно от другого на 2π/kN радиан,
где N - частотная мода вибрации вибрационного гироскопа,
a k - целое положительное число, определяемое в зависимости от порядка устраняемых ошибок.
Краткое описание чертежей
Другие особенности и преимущества изобретения станут более ясны из нижеследующего описания, приведенного исключительно в иллюстративных целях со ссылками на прилагаемые чертежи.
На чертежах:
- фиг.1-А иллюстрирует геометрическое положение вибрации вибрационного гироскопа;
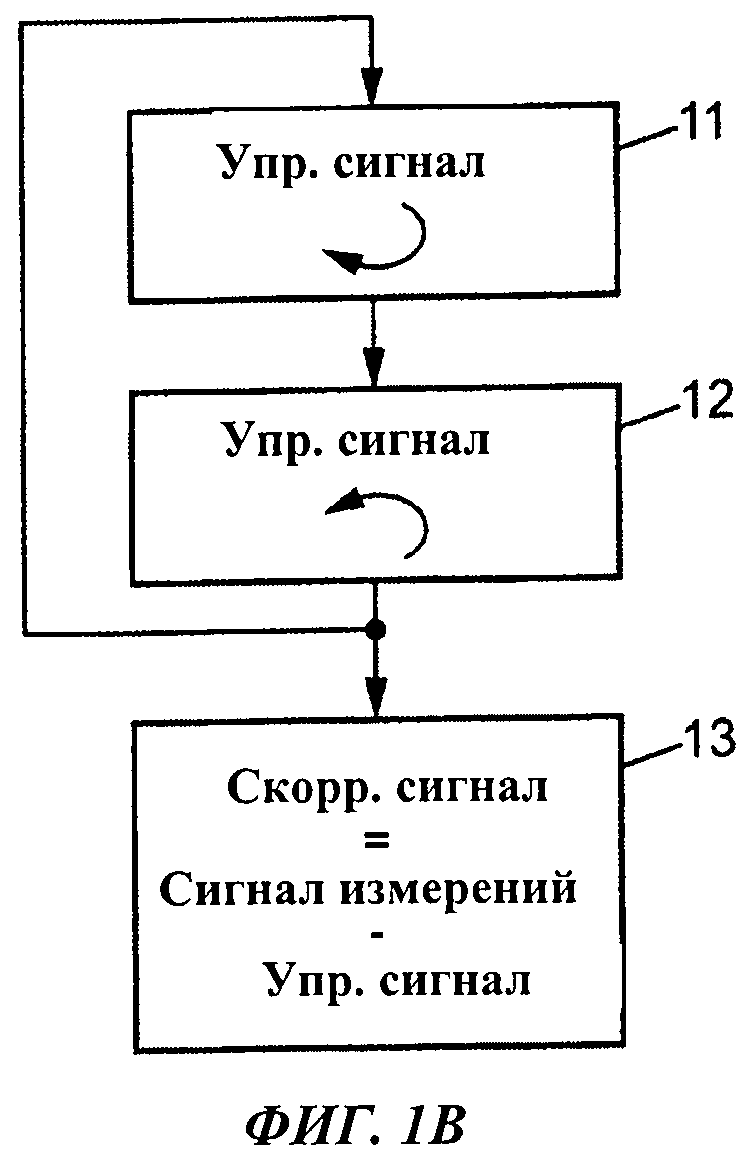
- фиг.1-В иллюстрирует основные шаги способа измерения при помощи гироскопической системы по одному из вариантов осуществления настоящего изобретения;
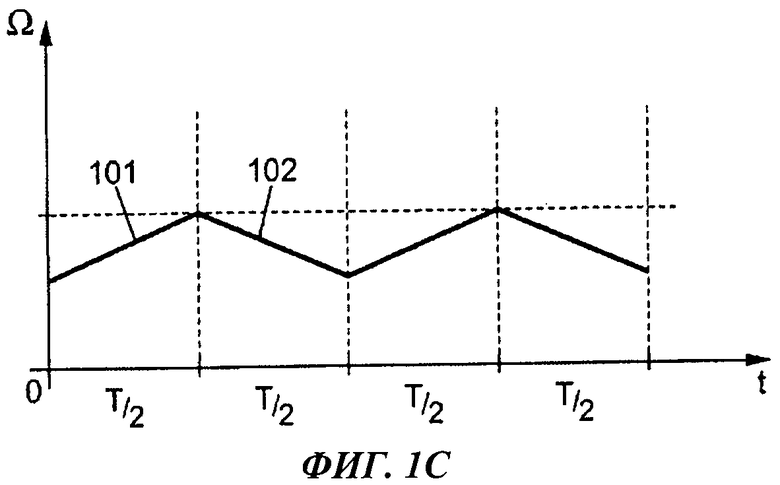
- фиг.1-С иллюстрирует первый и второй временные профили скорости по одному из вариантов осуществления настоящего изобретения;
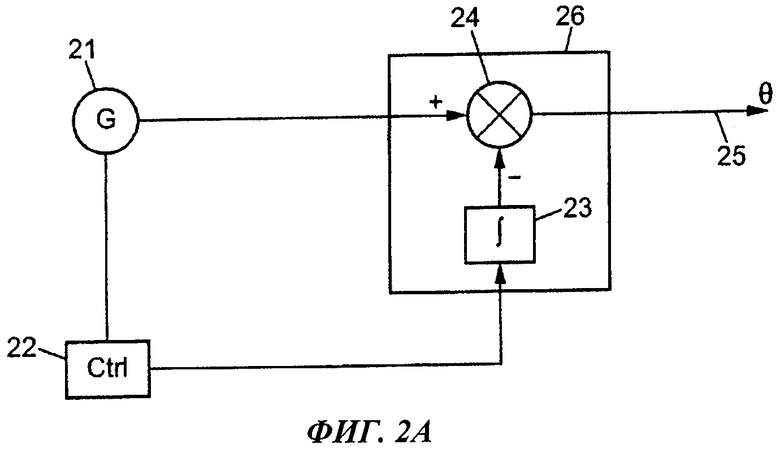
- фиг.2-А иллюстрирует архитектуру гироскопической системы по одному из вариантов осуществления настоящего изобретения;
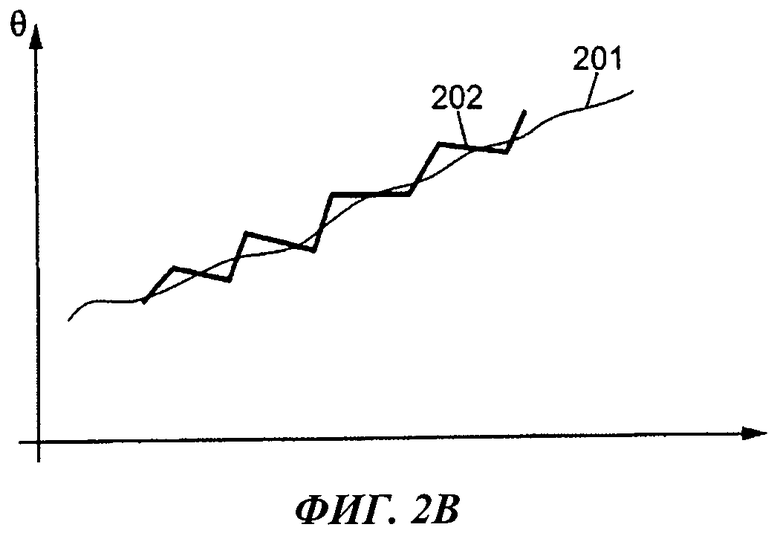
- фиг.2-В иллюстрирует скорректированный сигнал и скорректированный отфильтрованный сигнал по одному из вариантов осуществления настоящего изобретения;
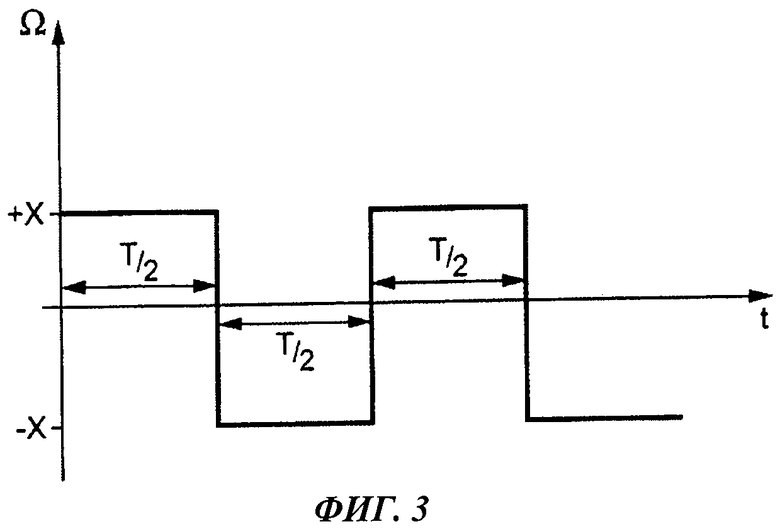
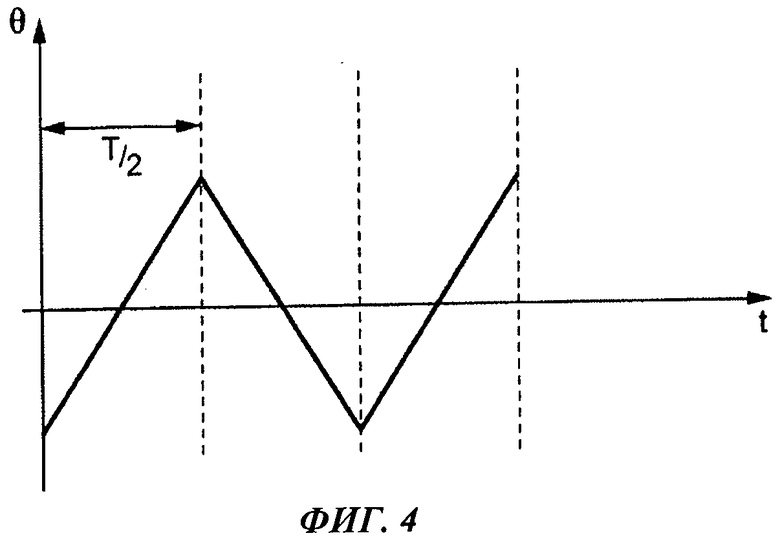
- фиг.3 и 4 иллюстрируют управляющий сигнал и его интегрирование по одному из вариантов осуществления настоящего изобретения;
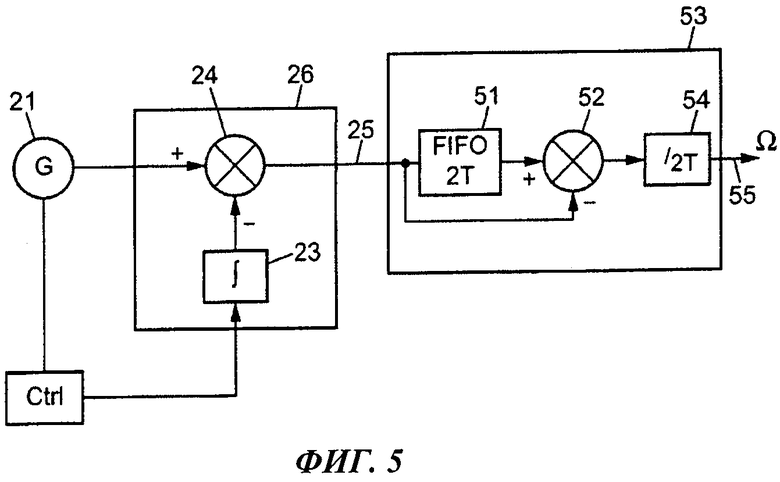
- фиг.5 иллюстрирует архитектуру гироскопического сигнала по другому варианту осуществления настоящего изобретения.
Осуществление изобретения
Фиг.1 иллюстрирует основные шаги способа измерения по одному из вариантов осуществления настоящего изобретения.
На шаге 11 периодический управляющий сигнал, предназначенный для поворота геометрического положения вибрации в первом направлении, применяют в течение части периода периодического управляющего сигнала. Под действием данного управляющего сигнала геометрическое положение вибрации вибрационного гироскопа приходит во вращение в первом направлении со скоростью, которая может изменяться во времени в соответствии с первым заранее определенным профилем. Таким образом, вибрационный гироскоп переходит от первого геометрического положения вибрации ко второму геометрическому положению вибрации. Такой первый скоростной профиль также может соответствовать постоянной скорости, и в таком случае геометрическое положение вибрации будет изменяться непрерывным образом в течение части рассматриваемого периода времени.
Затем на шаге 12 периодический управляющий сигнал, предназначенный для поворота геометрического положения вибрации во втором направлении, обратном первому направлению, применяют в течение другой части периода периодического управляющего сигнала. Данный управляющий сигнал вызывает изменение положения вибрации гироскопа от второго геометрического положения вибрации к первому геометрическому положению вибрации, причем такой переход происходит со скоростью, которая может изменяться со временем в соответствии со вторым скоростным профилем. Среднее значение управляющего сигнала за период периодического управляющего сигнала равно нулю.
В соответствии с одним из вариантов осуществления изобретения второй скоростной профиль соответствует обращенному во времени первому скоростному профилю. Таким образом, первый и второй скоростные профили взаимно симметричны относительно середины временного периода.
Таким образом, по завершении шага 12 вибрационный гироскоп приходит к исходному геометрическому положению вибрации, т.е. к первому геометрическому положению вибрации.
Следует отметить, что в соответствии с одним из вариантов осуществления настоящего изобретения первый и второй скоростные профили предполагают сохранение постоянной скорости, т.е. отсутствие изменений скорости во времени, в результате чего поворот положения вибрации как в первом, так и во втором направлении происходит с постоянной скоростью.
Управляющий сигнал представляет собой сигнал периодической прецессии, предназначенный для вызывания в вибрационном гироскопе прецессии в противоположных направлениях.
Затем шаги 11 и 12 повторяют так, чтобы получить данные измерений вибрационного гироскопа в течение некоторого периода времени при нахождении такого гироскопа в состоянии прецессии.
В такой конфигурации получение сигнала измерений вибрационного гироскопа возможно для разных геометрических положений вибрации. Для получения скорректированного сигнала достаточно вычесть из сигнала измерений вибрационного гироскопа управляющий сигнал, приложенный к вибрационному гироскопу, как это сделано на шаге 13. В качестве управляющего сигнала здесь может быть использован сигнал, указывающий изменение значения угла в зависимости от времени. В таком случае, если сигнал измерений гироскопа соответствует величине угла, вычитание двух сигналов может быть осуществлено напрямую, а если сигнал измерений соответствует величине угловой скорости, предусмотрено интегрирование значений управляющего сигнала для получения управляющего сигнала, соответствующего величине угла, и обеспечения возможности его вычитания из сигнала измерений.
Следует отметить, что действие на шаге 13 возможно выполнять непрерывно, а шаги 11 и 12 выполняются последовательно.
Таким образом, измерения, получаемые от гироскопической системы, могут быть основаны на скорректированном сигнале, который соответствует изменению геометрического положения вибрации гироскопа, и который получают путем вычитания сигналов управления из сигнала измерений, полученного от гироскопа во время осуществления шагов 11 и 12.
Фиг.1-С иллюстрирует первый и второй скоростные профили в соответствии с одним из вариантов осуществления настоящего изобретения. Фиг.1-С иллюстрирует зависимость управляющего сигнала от времени, т.е. изменение в зависимости от времени угловой скорости Ω. В данном случае угловая скорость, соответствующая управляющему сигналу, который вызывает изменение геометрического положения вибрации гироскопа, непрерывно возрастает в течение первой части периода управляющего сигнала и падает симметрично предшествующему росту в течение второй части периода управляющего сигнала. Таким образом, участок 101 иллюстрирует первый скоростной профиль, а участок 102 иллюстрирует второй скоростной профиль, причем данные скоростные профили взаимно обратны во времени.
В дальнейшем описании первый и второй скоростные профили исключительно в иллюстративных целях обеспечивают нулевое изменение скорости со временем, т.е. постоянную величину скорости.
Фиг.2-А иллюстрирует архитектуру гироскопической системы, которая содержит средства, выполненные с возможностью применения способа измерений по одному из вариантов осуществления настоящего изобретения.
Гироскопическая система по одному из вариантов осуществления изобретения содержит, по меньшей мере, один вибрационный гироскоп 21, выполненный с возможностью приема и обработки управляющих сигналов, принимаемых от управляющего модуля 22. Такой управляющий модуль 22 выполнен с возможностью передачи управляющих сигналов для осуществления управления изменениями геометрического положения вибрации гироскопа 21. Точнее, такой управляющий модуль 22 формирует управляющий сигнал, который вызывает поворот геометрического положения вибрации вибрационного гироскопа с непрерывно изменяющейся угловой скоростью от первого ко второму геометрическому положению вибрации.
Гироскопическая система дополнительно содержит обрабатывающий модуль 26, который принимает, с одной стороны, управляющие сигналы, передаваемые управляющим модулем 22, а с другой стороны, сигналы измерений, передаваемые гироскопом 21.
Обрабатывающий модуль 26 содержит интегрирующий модуль 23, выполненный с возможностью приема управляющих сигналов, передаваемых управляющим модулем 22, которые определяют величину угла, и осуществления интегрирования таких управляющих сигналов.
Кроме того, обрабатывающий модуль 26 содержит вычитатель 24 сигналов, который принимает, с одной стороны, сигналы измерений, передаваемые вибрационным гироскопом 21, а с другой стороны, интегрированные управляющие сигналы, передаваемые интегрирующим модулем 23, причем такой обрабатывающий модуль 26 выдает на выход 25 скорректированный сигнал.
Следует отметить, что скорректированный сигнал, выдаваемый на выход обрабатывающего модуля, содержит ошибку, связанную с масштабным коэффициентом. Следовательно, в скорректированном сигнале может присутствовать остаточный сигнал, связанный с управляющим сигналом, что может привести к снижению качества гироскопических измерений, производимых данной гироскопической системой.
Для того, чтобы избавиться от такой остаточной ошибки, связанной с масштабным коэффициентом, возможно, в частности, предусмотреть использование управляющего сигнала в течение временного интервала, достаточно долгого для того, чтобы остаточный сигнал можно было рассматривать как высокочастотный сигнал, который может быть отфильтрован. Тогда по истечении такого временного интервала скорректированный сигнал может быть подвергнут фильтрации.
Таким образом, продолжая подавать на вибрационный гироскоп периодический управляющий сигнал, возможно получить гироскопические измерения высокого качества в скользящем временном окне, длина которого, по меньшей мере, соответствует длительности такого временного интервала.
Для этого на выходе 25 гироскопической системы, представленной на фиг.2-А, может быть предусмотрен фильтр низких частот.
В соответствии с одним из вариантов осуществления настоящего изобретения на выход 25 может быть подан скорректированный сигнал, соответствующий величине угловой скорости, а не величине угла, как было описано выше. В таком случае, интегрирующий модуль 23 может отсутствовать в архитектуре системы, если управляющий сигнал непосредственно соответствует величине угла.
Так, фиг.2-В иллюстрирует скорректированный сигнал 202 на выходе 25 обрабатывающего модуля, в котором явно различим треугольный остаточный сигнал. Скорректированный отфильтрованный сигнал 201 соответствует сигналу на выходе фильтра низких частот.
Скорректированный отфильтрованный сигнал 201 соответствует здесь сигналу, используемому для выдачи результатов гироскопических измерений при помощи гироскопической системы по одному из вариантов осуществления настоящего изобретения.
Таким образом, при помощи фильтрации такая гироскопическая система может осуществлять гироскопические измерения высокого качества даже в том случае, когда масштабный коэффициент неизвестен.
Фиг.3 иллюстрирует управляющий сигнал по одному из вариантов осуществления настоящего изобретения. Данный сигнал представлен в системе координат, в которой по оси абсцисс отложено время, а по оси ординат отложена скорость вращения, задаваемая для геометрического положения вибрации вибрационного гироскопа. В данном случае, управляющий сигнал представляет собой прямоугольный сигнал, определяющий изменения скорости вращения, задаваемые для вибрационного гироскопа, в зависимости от времени. Здесь поочередно применяют скорость Ω вращения величиной +Х и -X в течение последовательных периодов времени длительностью Т/2. Таким образом, скорость вращения постоянна в течение каждого из периодов времени длительностью Т/2 и поочередно положительна и отрицательна в течение двух последовательных периодов времени длительностью Т/2. Величина скорости Ω вращения может, например, быть заключена в интервале от 0,5 градуса в секунду до 20 градусов в секунду.
Следует отметить, что в варианте осуществления изобретения, в котором производят фильтрацию управляющего сигнала, чем короче период управляющего сигнала, тем быстрее возможно получить скорректированный сигнал и, следовательно, высококачественные результаты измерений, проведенных при помощи гироскопической системы.
Управляющий сигнал, проиллюстрированный на фиг.3, подают одновременно на вибрационный гироскоп 21 и в обрабатывающий модуль 26.
После получения управляющего сигнала обрабатывающим модулем 26 такой управляющий сигнал, соответствующий значению угловой скорости, прежде всего интегрируют. Таким образом, в соответствии с одним из вариантов осуществления настоящего изобретения результат интегрирования управляющего сигнала, представленного на фиг.3, подают на выход интегрирующего модуля 23 в виде сигнала, проиллюстрированного на фиг.4.
Данный периодический сигнал треугольной формы с периодом 2Т соответствует зависимости геометрического положения вибрации вибрационного гироскопа 21 от времени.
Задавая однородное изменение положения вибрации в угловом диапазоне размером 2π/kN радиан, возможно усреднить ошибки сигнала измерений гироскопа в соответствии со следующим уравнением, в котором ошибки могут быть записаны в виде sin(nNθ) или cos(nNθ):
где N - частотная мода вибрации вибрационного гироскопа;
k - целое положительное число;
n - целое число, соответствующее порядку исправляемой ошибки; и
θ0 - исходное геометрическое положение вибрации вибрационного гироскопа.
Следует отметить, что целое число k может быть определено по порядку ошибок сигнала измерений вибрационного гироскопа, которые необходимо устранить. Для k, равного 1, и вибрационного гироскопа, для которого частотная мода равна 2 (т.е. N=2), возможно усреднить ошибки любого порядка, относящиеся к геометрическому положению вибрации гироскопа.
Для k, равного 1, и вибрационного гироскопа, для которого частотная мода равна 2, т.е. N равно 2, ошибки порядка n, большего или равного 1, устраняют в соответствии со следующим уравнением:
Число N, соответствующее частотной моде вибрации вибрационного гироскопа, может быть равно, например, 2 или 3, как, например, в случае вибрационного гироскопа, подобного описанному в патентной публикации US 7281426.
Может быть предусмотрено вычитание остаточного управляющего сигнала, связанного с масштабным коэффициентом, из сигнала измерений с определением разности между первым угловым значением, измеренным в начале периода управляющего сигнала, и вторым угловым значением, измеренным в конце такого периода, и делением полученной разности на величину периода.
Также могут быть учтены два геометрических положения вибрации вибрационного гироскопа в два разных момента одного или нескольких периодов управляющего сигнала. В таком случае, разность между двумя положениями делят на число периодов, разделяющих данные геометрические положения вибрации.
Таким образом, получают значение угловой скорости. В оптимальном варианте данное значение угловой скорости может быть скорректировано с устранением ошибки, связанной с масштабным коэффициентом.
Фиг.5 иллюстрирует архитектуру гироскопической системы, выполненной с возможностью получения таких значений угловой скорости в соответствии с одним из вариантов осуществления настоящего изобретения.
Представленная конфигурация системы отчасти сходна с описанной выше со ссылками на фиг.2-А с измененной обработкой на выходе 25, но, кроме того, предназначена для устранения остаточного управляющего сигнала, сохраняющегося в скорректированном сигнале и связанного с масштабным коэффициентом. В данном случае, скорректированный сигнал на выходе 25 обрабатывающего модуля 26 обрабатывают в вычислительном модуле 53, причем данный вычислительный модуль содержит стек 51 FIFO (First In First Out). Данный стек 51 FIFO сохраняет значения угла, поступающие с выхода обрабатывающего модуля 26, для целого числа периодов 2Т управляющего сигнала.
Затем вычитатель 52 совместно с делителем 54 применяют следующее уравнение, в результате чего на выходе 55 получают измеренные значения угловой скорости, не только скорректированные с устранением ошибок, связанных с геометрическим положением вибрации вибрационного гироскопа, но и дополнительно скорректированные с устранением ошибок, связанных с масштабным коэффициентом:

Вычитание на периоде M×2T позволяет устранить ошибки, связанные масштабным коэффициентом.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАЛИБРОВКА ГИРОСКОПИЧЕСКИХ СИСТЕМ С ВИБРАЦИОННЫМИ ГИРОСКОПАМИ | 2009 |
|
RU2509981C2 |
| КАЛИБРОВКА ВИБРАЦИОННОГО ГИРОСКОПА | 2009 |
|
RU2509980C2 |
| Микромеханический вибрационный кольцевой гироскоп | 2022 |
|
RU2800067C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| СПОСОБ КАЛИБРОВКИ ВИБРАЦИОННОГО ГИРОСКОПА | 2015 |
|
RU2687101C2 |
| СПОСОБ КАЛИБРОВКИ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ | 2004 |
|
RU2269813C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПРИ ПОМОЩИ ГИРОСКОПИЧЕСКОЙ СИСТЕМЫ | 2008 |
|
RU2476823C2 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ УНИФИЦИРОВАННЫХ СИСТЕМ ПОЗИЦИОНИРОВАНИЯ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ АКСЕЛЕРОМЕТРОВ И ГИРОСКОПОВ И АВТОМАТИЗИРОВАННЫЙ СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2381511C1 |
| НАВИГАЦИОННО-ТОПОГРАФИЧЕСКИЙ ВНУТРИТРУБНЫЙ ИНСПЕКТИРУЮЩИЙ СНАРЯД | 2007 |
|
RU2321828C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ОСЕСИММЕТРИЧНОГО ВИБРАЦИОННОГО ДАТЧИКА И ИНЕРЦИАЛЬНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2423669C1 |
Изобретение относится к вибрационным гироскопам. Гироскопическая система производит измерения при помощи вибрационного гироскопа, который вибрирует в первом положении вибрации и передает сигнал измерений. На вибрационный гироскоп в течение некоторого временного периода подают периодический управляющий сигнал, обеспечивающий поворот геометрического положения вибрации в первом направлении в течение части временного периода с переходом от первого ко второму положению в соответствии с первым скоростным профилем, поворот геометрического положения вибрации во втором направлении, противоположном первому направлению, в течение оставшейся части временного периода с переходом от второго к первому положению в соответствии со вторым скоростным профилем. Скоростные профили задают изменения скорости изменения положения. Формируют результаты измерений, произведенных системой, на основе скорректированного сигнала, полученного путем вычитания управляющего сигнала из сигнала измерений гироскопа. Изобретение обеспечивает повышение точности измерений. 2 н. и 11 з.п. ф-лы, 5 ил.
1. Способ гироскопических измерений, проводимых гироскопической системой, содержащей вибрационный гироскоп с вибрацией в исходном первом геометрическом положении вибрации, формирующий сигнал измерений, в котором:
на вибрационный гироскоп в течение определенного временного периода подают периодический управляющий сигнал, обеспечивающий:
- поворот геометрического положения вибрации в первом направлении в течение части временного периода с изменением положения вибрации указанного гироскопа от первого геометрического положения вибрации ко второму геометрическому положению вибрации в соответствии с первым скоростным профилем; и
- поворот геометрического положения вибрации во втором направлении, противоположном первому направлению, в течение оставшейся части временного периода с изменением положения вибрации указанного гироскопа от второго геометрического положения вибрации к первому геометрическому положению вибрации в соответствии со вторым скоростным профилем;
причем указанный управляющий сигнал имеет нулевое среднее значение за указанный временной период, а первый и второй скоростные профили задают изменение скорости изменения геометрического положения вибрации как функцию от времени,
при этом получают результаты измерений, произведенных гироскопической системой, на основе скорректированного сигнала, соответствующего изменению значений геометрического положения вибрации и полученного путем вычитания управляющего сигнала из сигнала измерений, сформированного гироскопом.
2. Способ по п.1, отличающийся тем, что второй скоростной профиль представляет собой обращение во времени первого скоростного профиля.
3. Способ по п.1, отличающийся тем, что две части временного периода идентичны.
4. Способ по любому из пп.1-3, в котором сигнал измерений гироскопа и управляющий сигнал выражены в виде результатов измерений, произведенных гироскопической системой, либо в виде значений угла, либо в виде значений угловой скорости.
5. Способ по любому из пп.1-3, отличающийся тем, что результаты измерений, произведенных гироскопической системой, соответствуют значениям угловой скорости, причем каждое из значений угловой скорости представляет собой результат деления разности между двумя значениями геометрического положения вибрации скорректированного сигнала, разделенными целым числом временных периодов, на длительность временного промежутка, соответствующего такому целому числу временных периодов.
6. Способ по любому из пп.1-3, отличающийся тем, что результаты измерений, произведенных гироскопической системой, получают в результате фильтрации скорректированного сигнала при помощи фильтра низких частот.
7. Способ по п.6, отличающийся тем, что перед выводом результатов измерений, произведенных гироскопической системой, периодический сигнал подают в течение временного промежутка, достаточно долгого для того, чтобы управляющий сигнал можно было считать высокочастотным сигналом по сравнению с сигналом измерений вибрационного гироскопа.
8. Способ по любому из пп.1-3, отличающийся тем, что временной период и первый и второй скоростные профили управляющего сигнала определены так, чтобы первое и второе геометрические положения вибрации вибрационного гироскопа отстояли одно от другого на 2π/kN радиан,
где N - частотная мода вибрации вибрационного гироскопа,
а k - целое положительное число, определяемое в зависимости от порядка устраняемых ошибок.
9. Гироскопическая система, содержащая:
вибрационный гироскоп с вибрацией в исходном первом геометрическом положении вибрации, формирующий сигнал измерений;
управляющий модуль, выполненный с возможностью подачи в течение определенного временного периода периодического управляющего сигнала, обеспечивающего:
- поворот геометрического положения вибрации в первом направлении в течение части временного периода с изменением положения вибрации указанного гироскопа от первого геометрического положения вибрации ко второму геометрическому положению вибрации в соответствии с первым скоростным профилем; и
- поворот геометрического положения вибрации во втором направлении, противоположном первому направлению, в течение оставшейся части временного периода с изменением положения вибрации указанного гироскопа от второго геометрического положения вибрации к первому геометрическому положению вибрации в соответствии со вторым скоростным профилем;
причем указанный управляющий сигнал имеет нулевое среднее значение за указанный временной период, а первый и второй скоростные профили задают изменение скорости изменения геометрического положения вибрации как функцию от времени; и
обрабатывающий модуль, выполненный с возможностью формирования скорректированного сигнала, соответствующего изменению значений геометрического положения вибрации и получаемого путем вычитания управляющего сигнала из сигнала измерений, сформированного вибрационным гироскопом.
10. Система по п.9, отличающаяся тем, что второй скоростной профиль представляет собой обращение во времени первого скоростного профиля.
11. Система по п.9, отличающаяся тем, что дополнительно содержит вычислительный модуль, предусмотренный на выходе обрабатывающего модуля, выполненный с возможностью выдачи результатов гироскопических измерений, соответствующих значениям угловой скорости, причем каждое из значений угловой скорости представляет собой результат деления разности между двумя значениями геометрического положения вибрации скорректированного сигнала, разделенными целым числом временных периодов, на длительность временного промежутка, соответствующего такому целому числу временных периодов.
12. Система по п.9, отличающаяся тем, что дополнительно содержит фильтр низких частот, предусмотренный на выходе обрабатывающего модуля, выполненный с возможностью фильтрации высокочастотных составляющих скорректированного сигнала.
13. Система по любому из пп.9-12, отличающаяся тем, что временной период и первый и второй скоростные профили управляющего сигнала определены так, чтобы первое и второе геометрические положения вибрации вибрационного гироскопа отстояли одно от другого на 2π/kN радиан,
где N- частотная мода вибрации вибрационного гироскопа,
а k - целое положительное число, определяемое в зависимости от порядка устраняемых ошибок.
| ИММУНОМОДУЛИРУЮЩИЕ СЛИТЫЕ БЕЛКИ И ПУТИ ИХ ПРИМЕНЕНИЯ | 2016 |
|
RU2755227C2 |
| Ореольный фотометр | 1988 |
|
SU1571417A1 |
| US 7174785 B2, 13.02.2007 | |||
| FR 2904870 A1, 15.02.2008 | |||
| Способ изготовления плавленныхфлюСОВ | 1978 |
|
SU810418A1 |
| JP 2005308650 A, 04.11.2005 | |||
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2001 |
|
RU2196964C1 |

