Изобретение относится к ракетной технике и предназначено для использования в системах наведения телеуправляемых ракет.
Известен способ наведения телеуправляемой ракеты, включающий измерение координат цели и ракеты, формирование опорной (кинематической) траектории наведения ракеты, формирование линейного рассогласования между ракетой и опорной траекторией, формирование пропорциональной этому рассогласованию команды управления ракетой и наведение ракеты на цель по сформированной команде управления ([1] А.А.Лебедев, В.А.Карабанов. Динамика систем управления беспилотными летательными аппаратами. М.: Машиностроение, 1965, с.327-329).
Данный способ имеет низкую точность наведения ракеты на подвижные цели из-за возникающей динамической ошибки, определяемой параметрами движения цели и инерционностью управления ракетой.
Известен способ наведения телеуправляемой ракеты, включающий измерение координат цели и ракеты, формирование опорной траектории наведения ракеты, формирование линейного рассогласования между ракетой и опорной траекторией, формирование команды управления, пропорциональной линейной комбинации линейного рассогласования между ракетой и опорной траекторией наведения, производной линейного рассогласования и интегралу от линейного рассогласования, и наведение ракеты на цель по сформированной команде управления ([2] В.И.Козлов. Системы автоматического управления летательными аппаратами. М.: Машиностроение, 1979, с.192). В известном способе команда управления ракетой u [м] формируется в соответствии с соотношением

где h [м] - линейное рассогласование между ракетой и опорной траекторией;
ph [м/с] - производная линейного рассогласования между ракетой и опорной траекторией («р» - оператор дифференцирования);
 - [мс] - интеграл от линейного рассогласования между ракетой и опорной траекторией («
- [мс] - интеграл от линейного рассогласования между ракетой и опорной траекторией (« » - оператор интегрирования);
» - оператор интегрирования);
к1,к2 [с], к3 [с-1] - весовые коэффициенты соответствующих составляющих команды управления;
W1 (р), W2 (p), W3 (p) - передаточные функции фильтров низких частот, которые вводятся для подавления высокочастотных помех, возникающих в процессе преобразований сигнала рассогласования h.
Введение в команду управления составляющей, пропорциональной интегралу от линейного рассогласования между ракетой и опорной траекторией, позволяет уменьшить установившуюся динамическую ошибку наведения ракеты при воздействии медленно меняющегося кинематического возмущения от движения цели. Однако такое условие не соответствует требованиям по точности реального процесса наведения ракеты, особенно в ближней зоне поражения и при перехвате маневрирующих целей. В этих условиях динамические ошибки носят неустановившийся характер, имеют большую величину, а время выбора этих ошибок в силу инерционности контура управления из-за ограничения по быстродействию может превышать время наведения ракеты до встречи с целью. Поэтому указанный способ наведения также имеет низкую точность.
Известен способ наведения телеуправляемой ракеты, включающий измерение координат цели и ракеты, формирование опорной траектории наведения ракеты, определение линейного рассогласования между ракетой и опорной траекторией, формирование команды управления, пропорциональной линейной комбинации линейного рассогласования между ракетой и опорной траекторией наведения и производной линейного рассогласования, определение динамической ошибки наведения ракеты по опорной траектории и последующее корректирование опорной траектории наведения на величину динамической ошибки наведения ракеты ([1], с.390-395).
В данном способе наведения в команду управления, формируемую пропорционально линейной комбинации линейного рассогласования между ракетой и опорной траекторией наведения и его производной, вводится корректирующая команда (сигнал компенсации динамической ошибки), смещающая опорную траекторию наведения на величину вычисленной динамической ошибки движения ракеты по требуемой опорной траектории. Текущее значение этой команды hk(t) [м] для одной плоскости наведения определяется соотношениями ([1], с.355, 393-394)

где h∂ (t) [м] - вычисляемая динамическая ошибка контура управления ракетой, связанная с движением цели, определяемая соотношением:
здесь jn.k.(t) [м/с2] - потребное нормальное ускорение ракеты на опорной траектории наведения;
K0 [c-2] - коэффициент передачи разомкнутого контура управления ракетой.
Потребное нормальное ускорение ракеты jn.k.(t) определяется соотношением

где F1(t) [м/c], F2(t)[м] - функции, определяемые летно-баллистическими характеристиками ракеты (дальностью rp(t) [м], ее производной rр (t) [м/с], скоростью Vр (t) [м/с] и продольным ускорением Vр (t) [м/с2]):

 [1/с],
[1/с],  [1/с2] - соответственно угловая скорость и угловое ускорение координаты опорной траектории наведения ракеты.
[1/с2] - соответственно угловая скорость и угловое ускорение координаты опорной траектории наведения ракеты.
Данный способ позволяет уменьшить динамическую ошибку наведения телеуправляемой ракеты на подвижные цели. Вместе с тем этот способ наведения ракеты обладает недостатками, связанными с погрешностью формирования корректирующей команды вида (2), которая определяется следующим:
- компенсация динамической ошибки наведения осуществляется не полностью из-за присущей способу физической нереализуемости теоретически потребного динамического коэффициента пропорциональности между формируемой компенсирующей командой и вычисленной динамической ошибкой;
- способ требует вычисления динамической ошибки наведения, при котором необходимо определять производные от угловых координат опорной траектории, что в условиях измерения зашумленных координат цели сделать с необходимой точностью практически невозможно;
- летно-баллистические характеристики ракеты, необходимые для формирования команды компенсации динамической ошибки, известны с определенной погрешностью, имеющей систематическую и случайную составляющие;
- способ обладает существенной погрешностью компенсации динамической ошибки при разбросе коэффициентов передачи ракеты и составляющих элементов системы наведения.
Это приводит к появлению систематической и флюктуационной составляющих сигнала компенсации (2) и соответственно к динамической ошибке наведения, имеющей систематическую составляющую и увеличенную флюктуационную составляющую.
Наиболее близким к предлагаемому является способ наведения телеуправляемой ракеты, включающий измерение координат цели и ракеты, формирование опорной траектории наведения ракеты, формирование линейного рассогласования между ракетой и опорной траекторией наведения, формирование команды управления, пропорциональной линейной комбинации линейного рассогласования между ракетой и опорной траекторией наведения, производной линейного рассогласования и интеграла от линейного рассогласования, определение динамической ошибки наведения ракеты по опорной траектории и последующее корректирование опорной траектории наведения на величину динамической ошибки наведения ракеты ([3], Е.А.Федосов, В.Т.Бобронников, М.Н.Красильщиков, В.И.Кухтенко и др. Динамическое проектирование систем управления автоматических маневренных летательных аппаратов. - М.: Машиностроение, 1997, с.251-253).
В известном способе величина динамической ошибки наведения ракеты, определяемая погрешностью формирования корректирующей команды для смещения опорной траектории, компенсируется за счет введения в закон формирования команды управления составляющей, пропорциональной интегралу от линейного рассогласования между ракетой и опорной траекторией наведения (так называемое повышение порядка астатизма контура управления ракетой). При этом компенсации, за счет введения дополнительных астатических свойств контура управления, подлежит только часть составляющей динамической ошибки наведения, определяемая погрешностью формирования команды компенсации динамической ошибки, что и обеспечивает повышение динамической точности наведения ракеты на подвижные цели. Однако при этом, введение в тракт формирования команды управления интегратора для формирования составляющей команды управления, пропорциональной интегралу от линейного рассогласования между ракетой и опорной траекторией, приводит к снижению запасов устойчивости контура управления и соответственно к повышению его склонности к колебательности и чувствительности к флюктуационным (шумовым) возмущениям во всех условиях наведения ракеты.
При наведении ракеты на малоподвижные цели или на скоростные цели, летящие на малых высотах (малых параметрах), когда кинематическое возмущение контура управления ракетой (4) по отношению к располагаемой перегрузке ракеты имеет небольшое значение, динамическая ошибка наведения и соответственно погрешность формирования компенсирующей команды имеют также небольшие значения. В этом случае превалирующей составляющей полной ошибки наведения является не динамическая ее составляющая, а флюктуационная. Поэтому необходимость повышения порядка астатизма контура управления ракетой с точки зрения обеспечения динамической точности становится избыточной и в тоже время приводит к повышенной колебательности и чувствительности контура управления к шумовым возмущениям.
При наведении ракеты на высокоскоростные цели, особенно в граничных по высоте точках зоны поражения или на маневрирующие цели, когда кинематическое возмущение контура управления ракетой, порождаемое движением цели, имеет значения, соизмеримые с величиной располагаемой перегрузки ракеты, динамическая ошибка и соответственно погрешность ее формирования имеют существенные значения для обеспечения точности наведения. В этом случае динамическая составляющая ошибки преобладает над флюктуационной составляющей и заранее выбранный вес составляющей команды управления при интеграле от линейного рассогласования между ракетой и опорной траекторией, определяемый значением коэффициента k3 в соотношении (1), не обеспечивает парирование ошибки наведения, вызванной существенной в этом случае погрешностью формирования команды компенсации динамической ошибки (2).
Этим определяются недостатки известного способа, которые снижают точность наведения ракеты.
Задачей настоящего изобретения является повышение динамической точности наведения телеуправляемой ракеты и расширение границ ее применения.
Поставленная задача решается тем, что в способе наведения телеуправляемой ракеты, включающем измерение координат цели и ракеты, формирование опорной траектории наведения ракеты, формирование линейного рассогласования между ракетой и опорной траекторией наведения, формирование команды управления ракетой, пропорциональной линейной комбинации линейного рассогласования между ракетой и опорной траекторией наведения, производной линейного рассогласования и интеграла от линейного рассогласования, определение динамической ошибки наведения ракеты по опорной траектории и последующее корректирование опорной траектории наведения ракеты на величину этой динамической ошибки, новым является то, что текущую составляющую команды управления ракетой, пропорциональную интегралу от линейного рассогласования между ракетой и опорной траекторией наведения, корректируют на величину, пропорциональную отношению текущего значения потребной перегрузки ракеты для движения по опорной траектории наведения к текущему значению располагаемой перегрузки ракеты, причем значение потребной перегрузки ракеты для движения по опорной траектории наведения определяют пропорционально величине вычисленной динамической ошибки наведения ракеты по опорной траектории с учетом коэффициента передачи разомкнутого контура управления ракетой.
В предлагаемом способе наведения телеуправляемой ракеты значение потребной перегрузки ракеты nпотр(t) для движения по опорной траектории наведения определяют по соотношению

где K0 (t) [с-2] - коэффициент передачи разомкнутого контура управления ракетой;
h∂ (t) [м] - динамическая ошибка наведения ракеты по опорной траектории;
g=9,81 [м/c2] - ускорение силы тяжести;
t [с] - текущее время полета ракеты.
Предлагаемый способ наведения ракеты поясняется следующим образом.
В процессе сопровождения цели измеряют ее сферические координаты: угол места εц, азимут βц и дальность rц. Далее посредством их дифференцирования и сглаживания определяют текущие угловые скорости и ускорения цели  ,
,  ,
,  и
и  , для определения динамической ошибки наведения.
, для определения динамической ошибки наведения.
После запуска ракеты и начала ее управления измеряют сферические координаты ракеты εр, βр, rр и далее с учетом координат цели в соответствии с выбранным методом наведения формируют опорную траекторию наведения в виде закона изменения угловых координат опорной траектории и ее производных, например, по соотношению ([2], стр.365) (далее для простоты рассматривается одна плоскость наведения, например, угломестная с координатой φ)

где φk [рад] - угловая координата опорной траектории;
φц [рад] - угловая координата цели;
Δφ [рад] - угол упреждения.
Затем по измеренным угловым координатам ракеты φр [рад] и координатам опорной траектории φk [рад] формируют их линейное рассогласование h

Далее по известным для данной ракеты программным (или измеренным) летно-баллистическим характеристикам и производным угловых координат опорной траектории 
 формируют значение потребного нормального ускорения (4), значение динамической ошибки (3) и команды компенсации динамической ошибки (2).
формируют значение потребного нормального ускорения (4), значение динамической ошибки (3) и команды компенсации динамической ошибки (2).
Одновременно по линейному рассогласованию в соответствии с соотношением (1) формируются составляющие команды управления, пропорциональные линейному рассогласованию, производные от него и интеграл от линейного рассогласования. Весовые коэффициенты k1 и k2 определяются заранее исходя из требований по обеспечению минимальных запасов устойчивости контура управления.
Далее производят корректирование текущей составляющей команды управления, пропорциональной интегралу от линейного рассогласования на величину, пропорциональную отношению текущего значения потребной перегрузки ракеты для движения по опорной траектории к текущему значению располагаемой перегрузки путем формирования текущего значения весового коэффициента k3 [с-1] для соотношения (1) в виде
где k3 min и k3 max - соответственно минимальное и максимальное значения весового коэффициента пропорциональной интегралу от линейного рассогласования составляющей команды управления;
Кзап - коэффициент запаса;
nпотр(t) - текущее значение потребной перегрузки ракеты для движения по опорной траектории;
nрасп(t) - текущее значение располагаемой перегрузки ракеты.
Минимальное значение коэффициента k3 min выбирается исходя из обеспечения минимально необходимых дополнительных астатических свойств контура управления для условий стрельбы по неподвижной цели и направленных на устранение динамической ошибки от возможных ненулей в командном тракте управления ракетой. Максимальное значение коэффициента k3 max выбирается исходя из минимально допустимых значений запасов устойчивости контура управления ракетой.
Значение коэффициента запаса Кзап задают исходя из знаний диапазона возможного разброса располагаемой перегрузки ракеты. Современный уровень проектирования ракет обеспечивает диапазон разброса в пределах 10-20% от номинального значения располагаемой перегрузки, т.е. Кзап=1,1-1,2.
Располагаемая перегрузка ракеты является основной ее динамической характеристикой, величина которой по времени полета определяется в процессе проектирования ракеты или экспериментом при летных испытаниях. Текущее значение располагаемой перегрузки определяется соотношением ([1], стр.146);

где Kp(t) [1/рад с] - коэффициент передачи, характеризующий маневренность ракеты и эффективность органов управления ракеты;
δmах [рад] - максимальный угол отклонения органов управления ракетой.
Значение располагаемой перегрузки ракеты в функции времени полета хранится в памяти системы наведения.
Потребная перегрузка ракеты соответствует текущему значению потребного нормального ускорения, необходимого для движения ракеты по опорной траектории, значение которого определяется соотношением (4). Тогда с учетом соотношений (2)-(3) текущее значение потребной перегрузки определяется выражением (6).
Значение коэффициента K0(t) в функции времени полета ракеты хранится в памяти системы наведения ракеты.
Далее полученную команду управления, определяемую линейным рассогласованием ракеты с опорной траекторией (1), суммируют с командой компенсации динамической ошибки (2) и затем передают на ракету.
Отрабатывая суммарную команду управления, ракета переходит с динамической траектории на скорректированную, совмещаясь с целью в точке встречи.
При этом за счет команды компенсации динамической ошибки компенсируется основная составляющая динамической ошибки движения ракеты по опорной траектории, и за счет корректирующего веса составляющей команды управления, пропорциональной интегралу от линейного рассогласования, компенсируется составляющая динамической ошибки, определяемая погрешностью формирования команды компенсации динамической ошибки и разбросом коэффициента передачи контура системы наведения. Корректирование команды управления (астатических свойств контура управления) обеспечивает рациональное соотношение систематической и флуктуационной составляющих динамической ошибки наведения по зоне поражения ракеты и в зависимости от угловой скорости цели снижает склонность контура управления к колебательности под действием шумов, что обеспечивает повышение точности наведения ракеты, особенно в граничных точках зоны поражения.
Предлагаемый способ наведения может быть реализован системой наведения, функциональная схема которой приведена на фиг.1, 2.
Система наведения ракеты (фиг.1) содержит пеленгатор цели (ПЦ) 2 и контур управления ракетой, включающий в каждом из каналов управления блок формирования сигнала компенсации динамической ошибки (КДО) 10, который подключен к выходу пеленгатора цели 2, последовательно соединенные пеленгатор ракеты (ПР) 1, блок формирования линейного рассогласования между ракетой и опорной траекторией наведения ракеты (ФЛО) 3, блок формирования команды управления, пропорциональной линейному рассогласованию между ракетой и опорной траекторией наведения (ФК) 4, сумматор (С) 5, второй вход которого подключен к выходу блока компенсации динамической ошибки 10, устройство передачи команд управления (ПК) 6 и ракету (Р) 7, а также последовательно соединенные блок программных параметров (БПП) 8 и блок коэффициентов астатизма (БКА) 9, второй вход которого подключен к второму выходу блока программных параметров, а третий вход - к выходу блока формирования сигнала компенсации динамической ошибки 10, выход соединен со вторым входом формирователя команд управления 4.
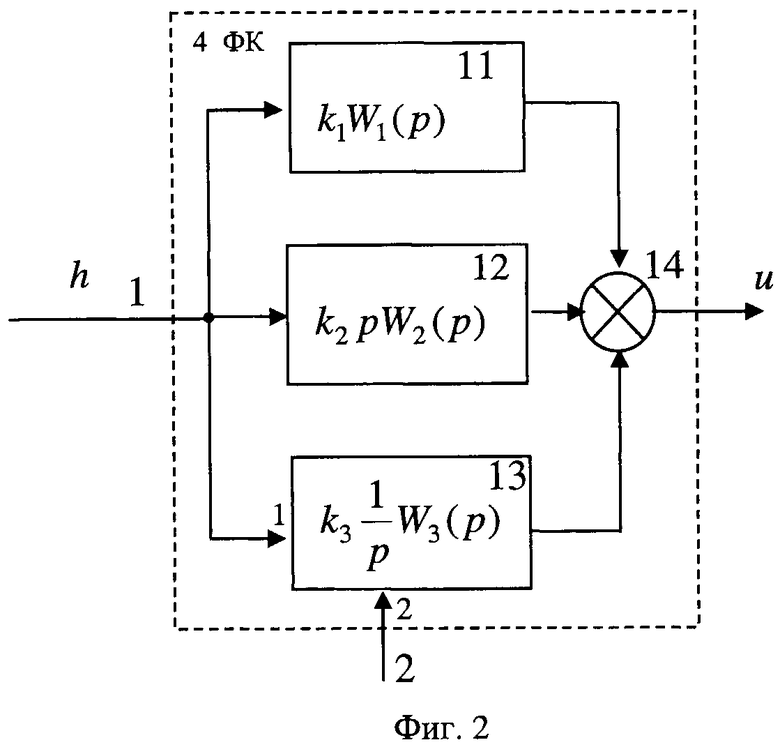
Блок формирования команды управления (фиг.2) включает в себя: блок формирования команды управления, пропорциональной линейному отклонению 11, блок формирования команды управления, пропорциональной производной линейного отклонения 12, блок формирования команды управления, пропорциональной интегралу линейного отклонения 13, на второй вход которого подается сигнал с выхода блока коэффициента астатизма 9, и сумматор 14.
Блок программных параметров 8 реализует зависимость программных значений располагаемой перегрузки ракеты nрасп(t) и коэффициента передачи разомкнутого контура управления ракетой K0(t) в функции времени полета ракеты.
Блок коэффициента астатизма 9 реализует корректируемый весовой коэффициент составляющей команды управления, пропорциональной интегралу от линейного отклонения, в виде зависимости (9).
Составляющие элементы системы: пеленгатор ракеты 1, пеленгатор цели 2, блок формирования линейного рассогласования между ракетой и опорной траекторией наведения ракеты, пропорциональной линейному рассогласованию между ракетой и опорной траекторией наведения ракеты 3, блок формирования команды управления 4, сумматор 5, устройство передачи команд управления 6, блок формирования сигнала компенсации динамической ошибки 10 - представляют собой известные штатные элементы систем наведения ракет ([1], с.366-372).
Блок программных параметров 8 и блок коэффициента астатизма 9 представляют собой счетно-решающие устройства и могут быть выполнены, например, на базе операционных усилителей ([4], И.М. Тетельбаум, Ю.Р.Шнейдер. Практика аналогового моделирования динамических систем. - М.: Энергоатомиздат, 1987, с.178-186, 221-222).
Система наведения телеуправляемой ракеты работает следующим образом. Пеленгатор цели 2 осуществляет сопровождение цели и измеряет ее координаты. После запуска ракеты пеленгатор ракеты 1 захватывает на сопровождение ракету и измеряет ее координаты. Далее рассматривается работа системы в одной полосе наведения. Измеренные угловые координаты цели и ракеты поступают соответственно на первый и второй входы блока формирования линейного рассогласования между ракетой и опорной траекторией ракеты 3, а также угловая целевая координата поступает на вход блока формирования сигнала компенсации динамической ошибки 10, с выхода которого сигнал компенсации подается на второй вход сумматора 5. В блоке 3 формируется сигнал линейного рассогласования между ракетой и опорной траекторией, который поступает на первый вход блока формирования команды управления, пропорциональной линейному рассогласованию между ракетой и опорной траекторией 4, на второй вход этого блока поступает текущее значение коэффициента астатизма с блока 9, сформированное с учетом программных значений располагаемой перегрузки и коэффициента передачи разомкнутого контура управления, определяемых в блоке программных параметров 8. Сформированная таким образом команда управления с выхода блока 4 поступает на первый вход сумматора 5, где суммируется с сигналом с выхода блока компенсации динамической ошибки 10, поступающим на его второй вход, и далее команда устройством передачи команд управления 6 передается на ракету 7. Ракета 7 под действием этой команды наводится на цель.
Таким образом, предлагаемый способ наведения телеуправляемой ракетой обеспечивает повышение точности наведения телеуправляемой ракеты и расширение условий применения, что выгодно отличает его от известных.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2011 |
|
RU2465535C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2106597C1 |
| СПОСОБ ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2013 |
|
RU2537124C1 |
| СИСТЕМА НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2191345C2 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ | 2009 |
|
RU2426969C2 |
| СПОСОБ ИСПЫТАНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2190184C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2016 |
|
RU2645850C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2011 |
|
RU2466345C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2260162C1 |
| СПОСОБ КОМАНДНОГО ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2000 |
|
RU2188381C2 |
Способ включает измерение координат цели и ракеты, формирование опорной траектории наведения ракеты, формирование линейного рассогласования между ракетой и опорной траекторией наведения, формирование команды управления ракетой, пропорциональной линейной комбинации линейного рассогласования между ракетой и опорной траекторией наведения, производной линейного рассогласования и интегралу от линейного рассогласования, определение динамической ошибки наведения ракеты по опорной траектории и последующее корректирование опорной траектории наведения ракеты на величину этой динамической ошибки. Текущую составляющую команды управления ракетой, пропорциональную интегралу от линейного рассогласования между ракетой и опорной траекторией наведения, корректируют на величину, пропорциональную отношению текущего значения потребной перегрузки ракеты для движения по опорной траектории наведения к текущему значению располагаемой перегрузки ракеты. Текущее значение потребной перегрузки ракеты для движения по опорной траектории наведения определяют пропорционально величине вычисленной динамической ошибки наведения ракеты по опорной траектории с учетом коэффициента передачи разомкнутого контура управления ракетой. Технический результат - повышение динамической точности наведения телеуправляемой ракеты и расширение условий ее применения. 1 з.п. ф-лы, 2 ил.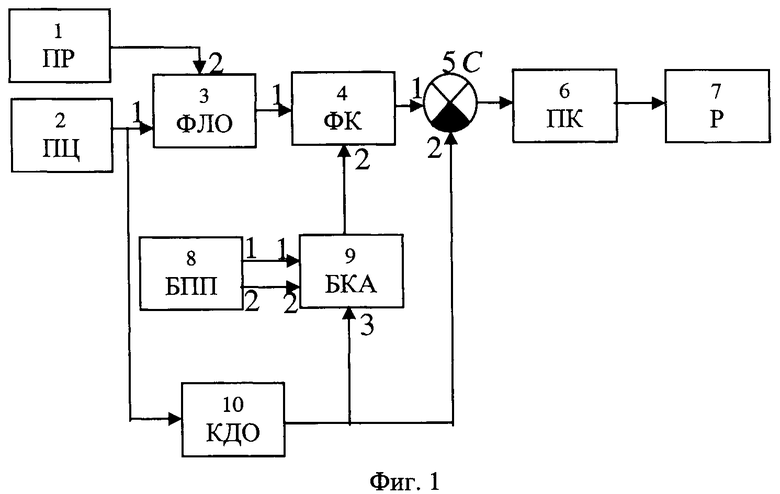
1. Способ наведения телеуправляемой ракеты, включающий измерение координат цели и ракеты, формирование опорной траектории наведения ракеты, формирование линейного рассогласования между ракетой и опорной траекторией наведения, формирование команды управления ракетой, пропорциональной линейной комбинации линейного рассогласования между ракетой и опорной траекторией наведения, производной линейного рассогласования и интегралу от линейного рассогласования, определение динамической ошибки наведения ракеты по опорной траектории и последующее корректирование опорной траектории наведения ракеты на величину этой динамической ошибки, отличающийся тем, что текущую составляющую команды управления ракетой, пропорциональную интегралу от линейного рассогласования между ракетой и опорной траекторией наведения, корректируют на величину, пропорциональную отношению текущего значения потребной перегрузки ракеты для движения по опорной траектории наведения к текущему значению располагаемой перегрузки ракеты, причем текущее значение потребной перегрузки ракеты для движения по опорной траектории наведения определяют пропорционально величине вычисленной динамической ошибки наведения ракеты по опорной траектории с учетом коэффициента передачи разомкнутого контура управления ракетой.
2. Способ наведения телеуправляемой ракеты по п.1, отличающийся тем, что текущее значение потребной перегрузки ракеты nпотр(t) для движения по опорной траектории наведения определяют по соотношению
 ,
,
где K0(t) [c-2] - коэффициент передачи разомкнутого контура управления ракетой;
h∂(t) [м] - динамическая ошибка наведения ракеты по опорной траектории;
g=9,81 [м/с2] - ускорение силы тяжести;
t[с] - текущее время полета ракеты.
| ФЕДОСОВ Е.А., БОБРОННИКОВ В.Т | |||
| и др | |||
| Динамическое проектирование систем управления автоматических маневренных летательных аппаратов | |||
| - М.: Машиностроение, 1997, с.251-253 | |||
| СИСТЕМА НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2191345C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2106597C1 |
| СИСТЕМА НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2006 |
|
RU2329454C2 |
| СЕГНЕТОЭЛЕКТРИЧЕСКИЙ ЭЛЕМЕНТ ДЛЯ ЗАПОМИНАЮЩЕГО УСТРОЙСТВА С ОПТИЧЕСКИМ СЧИТЫВАНИЕМ ИНФОРМАЦИИ | 2007 |
|
RU2338284C1 |

