q О5
to
О)
оо
I 4 JMJfrnJl
I IHMBM
Вход МУ 17 объединен с первыми входами ОР 15, С 10 и подключен к выходу формирователя 14. Второй .вход ОР 15 соединен с выходом регулятора 3 частоты вращения а выход - с первым входом С 16. Второй вход С 16 подключен к выходу У 17, а выход - к йходу регулятора 3. Первая пара входов формирователя 14 связана с выходами датчиков 12,13 тока, устанорленных на выходе инвертора 2, подключенного к- асинхронному двигателю t. Управление инвертором ос5тцествляется формирователем 11 фазных управляющих сигналов, входы к-рого соединены с выходами
формирователя 6 гармонических сигналов. Вторая пара выходов формирователя 6 подключена к иторой паре входов формирователя 14. З правляющий вход 7 формирователя 6 через МУ 5 связан с задатчиком 4 тока намагничивания, управляющий вход 8 - с выходом ОР 15, а -ВХОД 9 задания частоты - с выходом С 10. Использование информации о мо- ментозадающей составляющей тока статора асинхронного двигателя в качестве сигнала обратной связи позволяет регулировать частоту вращения ротора и величину тока статора в отсутствии тахогенератора. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод | 1986 |
|
SU1453574A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1677840A2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Асинхронный электропривод с частотно-токовым управлением | 1984 |
|
SU1239824A1 |
| Асинхронный электропривод | 1990 |
|
SU1767690A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1987 |
|
SU1534736A1 |
| Электропривод с асинхронной машиной | 1971 |
|
SU548220A3 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1372579A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
Изобретение относится к электротехнике и может быть использовано в различньк типах станков и других исполнительных механизмах общепромышленного назначения. Целью изобретения является упрощение и улучшение динамических характеристик путем Повышения быстродействия. Для этого в электропривод введены формирователь 14 текущего значения моментозадакяцей составляющей тока статора, определитель рассогласования (О) 15, сумматор (С) 16 и масштабный усилитель (МУ) 17,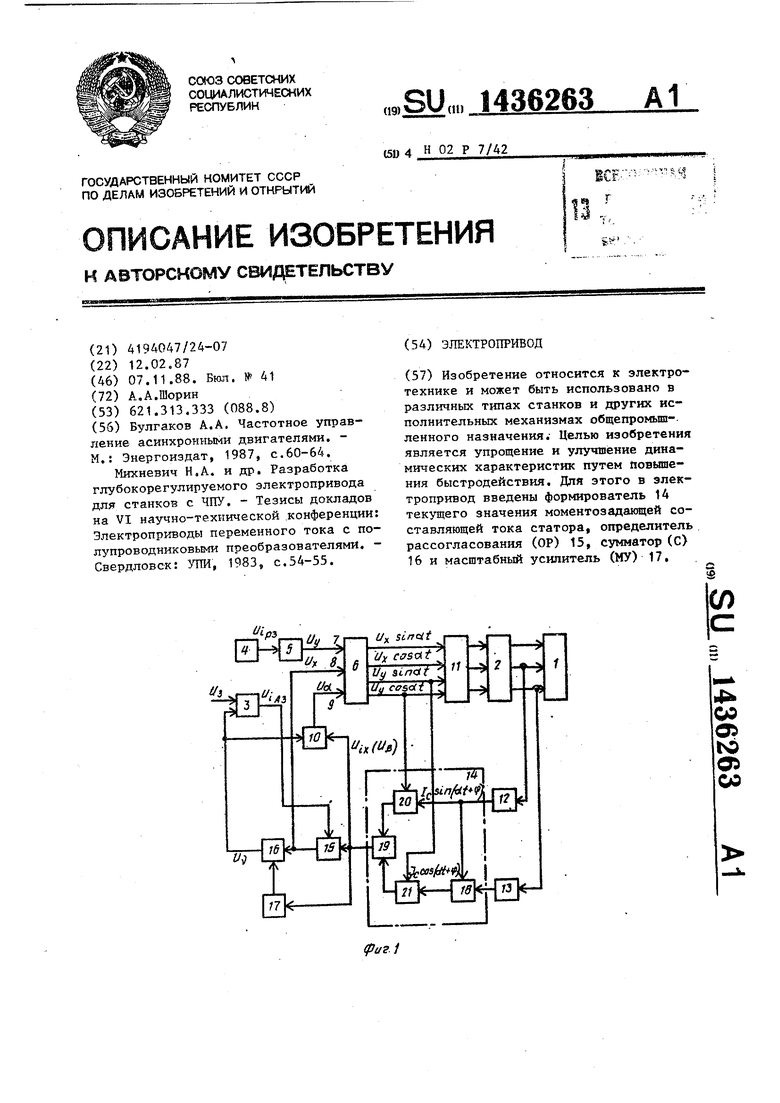
Изобретение относится к электротехнике , а изяенно к управляемому электроприводу на основе асинхрйнного двигателя и автономного инвертора, и может найти применение в различных типах станков и других исполнительных механизмах общепромьшшенного назначения.
Цель изобретения - упрощение и улучшение динамических характеристик путем повьппения быстродействия.
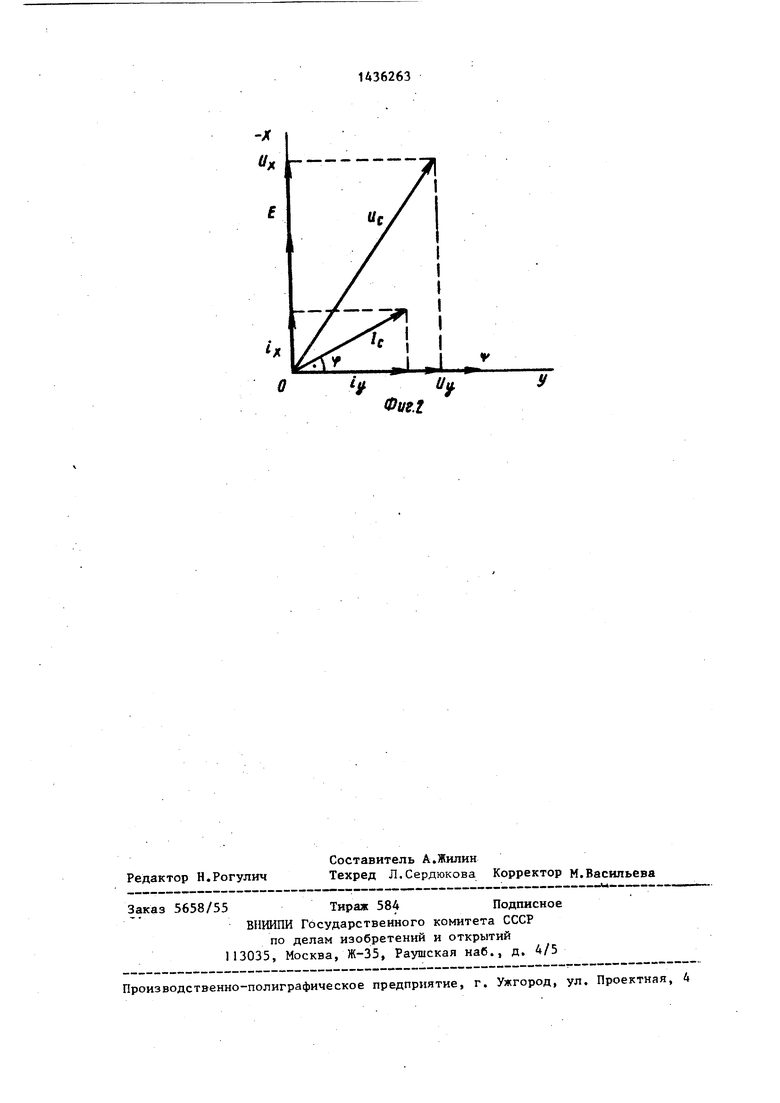
На фиг.1 представлена функциональная схема электропривода на фиг.2 - векторная диаграмма асинхронного двигателя .
Электропривод (фиг.1) содержит асинхронный двигатель 1, подключенный к выходам автономного инвертора 2, регулятор 3 частоты вращения, задат- чик 4 тока намагничивания, первый масштабный усилитель 5, формирователь 6 двухфазных гармонических сигналов с двумя управляющими входами 7 и 8 задания амплитуд составляющих напряжения статора, с входом 9 задания частоты и двумя парами выходов, первый сз«Ф1атор 10, формирователь И фазных управляющих сигналов и два датчика 12 и 13 фазных токов статора.
Выход задатчика 4 тока намагничивания подключен к входу первого масштабного усилителя 5, соединенного выходом с первым управляющим входом 7 задания амплитуды намагиичивающей составляющей напряжения статора формирователя 6 двухфазньж гармонических
сигналов, вход 9 за,с1ания частоты которого подключен к ;зыходу первого сумматора 10, а выходы - к соответствующим входам форми:эователя 11 фазных управляющих сигнало:з, подключенного выходами к управляюДИМ. входам автономного инвертора i,
В электропривод введены формирователь 14 текущего значения моменто- задающей составляющими тока статора с двумя парами входов, определитель
15рассогласования, второй сумматор
16и второй масштаб;1ый усилитель 17 вход которого объед.чнен с первыми входами определител. 15 рассогласования и первого сумматора 10 и подключен к входу формиро зателя 14 текущего значения моментосоставляющей тока статора, первая nap.i входов которого подклю чена к выхода) соответствующих датчиков 12 и 13 фазных токов статора, а вторая пара входов - соответственно к второй паре выходов формирователя 6 двухфазных гармонических сигналов. При этом ;зыход регулятора
3 частоты вращения подключен к второму входу oпpeдeлитeJ я 15 рассогласования,, соединенного В кодом с вторым управляющим входом о задания амплитуды составляющей напряжения статора формирователя 6 двухфазных гармонических сигналов и с первым входом второго сумматора 1 i, второй вход ко- торого подключен к BI ходу второго масштабного усилителя 1 7,а выход второго сумматора - к входу регулятора 3 частоты вращения и к второму входу первого сумматора 10,
Формирователь 14 текущего значения моментозадающей составляющей тока статора выполнен с двумя сумматорами 18 и 19 и двумя умножителями 20 и 21. Первый вход сумматора 18 и объединенные между собой второй вход сумматора 18 и первый вход умножителя 20 образуют первую пару входов указанного формирователя 14.
На фиг.1 и 2 приняты следующие обозначения: U - сигнал задания частоты вращения, U - сигнал, пропорциональный текущему значению частоты вращения ротора, Uл сигнал задания абсолютного скольжения, U - сигнал, пропорциональный текущему значению моментозадающей составляющей тока статора, Uf/ij - сигнал задания момен- тозад щей составляющей тока статора; и,р5 сигнал задания тока намагничивания; и - сигнал задания частоты
потокосцеплением обеспечивается при условии постоянства величины тока намагничивания, т.е. i«) const, и при условии ттропорциональности скольжения р и величины моментозадающей составляющей тока статора i ,
Преобразуя уравнения (1), получают
10
VV и у - (г, + г-г).1)Г9 (2) где л) с/- р - частота вращения ро-
тора,
Зная информацию о составляющей тока i5 статора IK, можно получить сигнал обратной связи по частоте вращения. Электропривод работает следующим образом.
На входах регулятора 3 частоты 10 вращения сравниваются сигналы Uj и и и по резульатам сравнения формируется сигнал задания моменто- образующей составляющей тока статора.
Сигнал задания U ,-pj тока намагни- тока статора} цг- вектор постокосцеп-25 чивания поступает с выхода задатчйка ления; Uc ,1с - векторы напряжения и д согласуется по масштабу с помощью тока статора, Е - вектор п ротивоЭДС, усилителя 5 и в виде сигнала задания
V у
и,и
жения и тока статора на оси х, у; of- частота тока CTaTopaj i/- угол между векторами If. и V
Записьтают уравнения асинхронного двигателя в подвижной системе коор- .динат с осями х, у (фиг.2), вращающейся с синхронной частотой- вращения и ориентированной осью у по вектору потокосцеплелия v при выполнении условия const:
- проекции дектора напря- и для намагничивающей составляющей
напряжения поступает на вход 7 форми- 30 рователя 6. На входы 8 и 9 того же формирователя 6 поступают соответственно сигнал задания U; для моментозадающей составляющей напряжения и сигнал и с выхода сумматора 10 для
35
задания частоты тока статора.
На выходах формирователя 6 получают две системы двухфазных гармонических напряжений Uxsinoft, Uycosoft и jUySinott, Uycoso t. Указанные напряже- 4о ния поступают на соответствующие входы формирователя .11 фазных управляющих сигналов 11, осуществляющего формирование фазных токов асинхронного двигателя 1.
IS у c((t +
X
Uy
(1)
-/3it +
(j/ - L
где L - приведенная индуктивность обмоток (в предположении отсутствия индуктивностей рассеяния, что для двигателей серий ЧА и ДАТ вьтолняется с точностью 3-7%);
приведенные активные сопротивления статора и ро тора. Из (1) следует, что регулирование
асинхронного двигателя с постоянным
г,,г
,
потокосцеплением обеспечивается при условии постоянства величины тока намагничивания, т.е. i«) const, и при условии ттропорциональности скольжения р и величины моментозадающей составляющей тока статора i ,
Преобразуя уравнения (1), получают
VV и у - (г, + г-г).1)Г9 (2) где л) с/- р - частота вращения ро-
тора,
Зная информацию о составляющей тока статора IK, можно получить сигнал обратной связи по частоте вращения. Электропривод работает следующим образом.
На входах регулятора 3 частоты вращения сравниваются сигналы Uj и и и по резульатам сравнения формируется сигнал задания моменто- образующей составляющей тока статора.
35
задания частоты тока статора.
На выходах формирователя 6 получают две системы двухфазных гармонических напряжений Uxsinoft, Uycosoft и jUySinott, Uycoso t. Указанные напряже- 4о ния поступают на соответствующие входы формирователя .11 фазных управляющих сигналов 11, осуществляющего формирование фазных токов асинхронного двигателя 1.
Формирователь 14 текущего значения моментозадающей составляющей тока статора реализует следующее вращение
45
ь й
50
, 55
Ufx KIcSin(c/t+i -Uycoseft KI cosUt+i)Uysina t KlcUv sin,
(3)
где К - коэффициент пропорциональнос. ти.
Поскольку (фиг.2) sinif ij(/Ic , то (3) получают
из выражения
ки,
х
(4)
т.е. сигнал на выходе формирователя 14 при вьтолнении условия U,y const пропорционален текущему значению мо- ментозадагощей составляющей тока ста- тора . Сигнал U;, определяющий согласно (3) текущее значение абсолютного скольжения /ь, поступает на один из входов сз мматора 10. Сигнал и поступает также на вход оп- ределителя 15 рассогласования (вьшол ненного, например, в виде ПИ-регуля- тора)-, где сравнивается с сигналом и.д , По результатам сравнения формируется сигнал и, поступающий на вхо 8 формирователя 6 и на один из входов сумматора 16.
С помощью сумматора 16 и масштабного усилителя 17 реализуется выражение (4), обеспечивающее получение информации о текущей частоте вращения ротора и Е V, которая поступает на другой вход сумматора 10 и в качестве сигнала обратной связи на вход регулятора 3 частоты вращения,
Таким образом, использование вычисленной информации о моментозадаю- щей составляющей тока статора в качестве сигнала обратной связи позволяет регулировать в электроприводе частоту Вращения ротора и величину тока статора без установки специального тахо- датчика, благодаря чему в сравнении с известным устройством увеличивается быстродействие и улучшаются динамические характеристики.
Формула изобретения
Электропривод, содержащий асин хронный двигатель, подключенный к выходам автономного инвертора, регуля тор частоты вращения задатчик тока намагничивания, первый масштабный усилитель, формирователь двухфазных гармонических сигналов с двумя управляющими входами задания амплитуд сое- тавляющих напряжения статора, с входом задания частоты и с двумя парами выходов, первый сумматор, формирова
. с
Q 5
5
5
0
тель фазных управляющей сигналов и два датчика фазных статора, при . этом выход задатчика гока намагничивания подключен к вхо:(у первого масштабного усилителя, соединенного выходом с первым згаравл5поцим входом задания амплитуды состав- яющей напряжения формирователя дву :фазных гармонических сигналов, вход задания частоты которого подключен к Е1ыходу первого сумматора, а выходы - к соответствующим входам формироват-;ля фазных управляющих сигналов, подключенного выходами к управляющим Е1ходам автономно го инвертора, отличающий- с: я тем, что, с цель о упрощения конструкции и улучшения сщнамических характеристик за счет увеличения быстродействия, введены формирователь текущего значения моменгозадающей составляющей тока статорн с двумя парами входов, определитепь рассогласования, второй сумматор я второй масштабный усилитель, вхоц которого объединен с первыми входами определителя рассогласования и перЕюго сумматора и подключен к выходу Формирователя текущего значения момЕштообразующей составляющей тока статора, первая пара уходов которого подключена к выходам соответствующих датчиков фазных токов статора, а вторая пара входов- соответственно к второй паре выходов формирователя двухфазных гармонических сигналов, при этом выход регулятора частоты вращения подключен к второму входу определителя рассогласо ва- ния, соединенного выходом с вторым управляющим входом задания амплитуды составляющей напряжения статора формирователя двухфазных гармонических сигналов и с первым вводом второго сумматора, второй вход которого подключен к выходу второго масштабного усилителя, а выход вт:)рого сумматора - к входу регулятора частоты вращения и к второму входу первого сумматора.
| Булгаков А.А | |||
| Частотное управление асинхронными двигателями | |||
| - М.: Энергоиэдат, 1987, с.60-64 | |||
| Михневич Н,А | |||
| и др | |||
| Разработка глубокорегулируемого электропривода для станков с ЧПУ | |||
| - Тезисы докладов на VI научно-технической .конференции: Электроприводы переменного тока с полупроводниковыми преобразователями | |||
| - Свердловск: УПИ, 1983, с.54-55. |
