Изобретение относится к области подъемно-транспортирующего оборудования, а более конкретно к захвату, тип которого указан в ограничительной части независимого пункта формулы изобретения. Захват предназначен для захватывания и перемещения с удержанием плоских предметов, в частности печатной продукции, например газет, журналов, брошюр или небольших групп подобных изделий.
Из уровня техники известен способ конвейерного перемещения плотным потоком различных плоских предметов, например печатной продукции, такой как газеты, журналы или брошюры, причем печатные изделия перемещаются друг за другом с по существу параллельным взаимным расположением, а вектор перемещения направлен перпендикулярно или наклонно (непараллельно) основным поверхностям печатных изделий. Промежутки между следующими друг за другом изделиями обычно существенно меньше поверхностной протяженности этих изделий. Для конвейерного перемещения таких плотных потоков применяют, например, транспортеры с захватами. Эти транспортеры имеют группу захватов, закрепленных на несущем органе, например, на плоскозвенной шарнирной цепи, движущейся в канале по замкнутой траектории, причем указанные захваты выполнены с возможностью захватывания и перемещения с удержанием одного печатного изделия или небольшой группы печатных изделий.
Упомянутые захваты обычно имеют две зажимные лапки, которые могут поворачиваться друг относительно друга с переходом в разомкнутое или сомкнутое положение под воздействием соответствующих управляющих/кулачковых средств, размещенных вдоль пути перемещения, причем при разомкнутом положении ориентированные друг к другу зажимные губки, предусмотренные на периферических концах указанных зажимных лапок, находятся на некотором расстоянии друг от друга и не могут обеспечить зажим, тогда как при сомкнутом положении эти губки прижимаются друг к другу или к помещенной между ними части печатного изделия. При осуществлении захватывания печатного изделия его позиционируют между зажимными губками разомкнутого захвата, после чего захват смыкают. Для обеспечения перемещения с удержанием захват фиксируют в сомкнутом положении, предпочтительно блокируют, а при отпускании печатного изделия снова размыкают или, соответственно, разблокируют.
В патенте DE 3102242 (или US 4381056) описан подобный захват. Этот захват имеет две зажимные лапки, оснащенные ориентированными друг к другу губками. Первая зажимная лапка установлена на корпусе захвата неподвижно, тогда как вторая лапка установлена на корпусе захвата с возможностью поворота на валу. Вторая лапка на своем ближнем к месту крепления конце имеет спиральную пружину, которая крепится к валу и навита вокруг него. Поскольку при вращении вала относительно корпуса захвата вторая зажимная лапка движется вместе с ним, т.е. соответствующим образом поворачивается, пружина остается ненапряженной. Однако если губка второй лапки прилегает к губке первой лапки, а вал продолжает вращаться, пружина напрягается и передает зажимное усилие на печатную продукцию, зажатую между губками обеих лапок. При открывании и закрывании захвата и отжимании второй лапки, на вал второй лапки воздействует кулачковый рычаг с кулачковым роликом, причем вдоль пути перемещения предусмотрены неподвижные кулачки, по которым прокатывается ролик. Кроме того, захват имеет средства, при помощи которых вторая лапка или вал стопорятся в их закрытом и зажатом положении относительно первой лапки. Для этого на валу и первой лапке помещено по одному стопорному элементу. Когда вал достигает заданного углового положения, стопорные элементы сцепляются друг с другом. Блокировка размыкается посредством защелки, которая соединена со стопорным элементом первой лапки и может приводиться в действие неподвижным управляющим/кулачковым элементом.
Задача данного изобретения состоит в улучшении захватов указанного типа, в частности захвата по патенту DE 31202242, кратко описанного выше. Улучшение направлено на то, чтобы эти захваты можно было применять для захватывания и перемещения широкого ассортимента плоских предметов. В частности, предлагаемый захват должен обеспечивать надежное захватывание и перемещение с удержанием толстых и тяжелых плоских предметов, очень тонких и легких плоских предметов, а также групп плоских предметов, имеющих участки разной толщины. Кроме того, предлагаемый захват должен обеспечивать возможность захватывания с зажиманием широкого ассортимента плоских предметов, исключая возникновение между губками зажимных лапок и захваченным предметом (или между отдельными частями захваченного предмета) сдвигающих сил, приводящих к пачканию печатной продукции, в результате чего можно было без проблем манипулировать даже с печатной продукцией, на которой краска еще не успела приобрести окончательную сопротивляемость смазыванию.
Поставленная задача решается благодаря захвату, охарактеризованному приложенной формулой изобретения.
Главный признак, благодаря которому предлагаемый захват отличается от известных аналогов, состоит в том, что периферический конец по меньшей мере одной зажимной лапки захвата содержит два плеча, которые с обеих сторон лапки проходят в наружном направлении по существу параллельно оси вращения и на своих свободных концах имеют по одной губке, причем обе эти губки расположены на максимально возможном расстоянии друг от друга. Плечи по меньшей мере одной зажимной лапки являются упругоизгибаемыми в направлении действия зажимной силы. Кроме того, в предпочтительном случае оба плеча по меньшей мере одной зажимной лапки слегка направлены к другой лапке так, что вместе два плеча на той своей стороне, которая обращена к другой лапке, образуют слегка вогнутую форму.
Губки, размещенные на свободных концах плеч, в предпочтительном случае имеют по существу плоские контактные поверхности, ориентация и, возможно, форма которых под действием зажимной силы, прижимающей губки друг к другу или к помещенному между ними предмету, может адаптироваться к контактной поверхности противоположной губки или к зажатому предмету.
Благодаря распределению зажимного действия по двум частям зажимания, которые разнесены в боковом направлении на некоторое расстояние друг от друга и соединены друг с другом с возможностью упругого изгибания, становится возможным не только более стабильно удерживать зажатое печатное изделие (уменьшены вращающие моменты, действующие поперек направления перемещения и воспринимаемые захватом и несущим органом), но и более надежно захватывать предмет, имеющий неодинаковую толщину в пределах двух указанных участков зажимания.
Контактные поверхности зажимных губок предпочтительно лежат в плоскости, которая ориентирована по существу радиально к оси вращения, причем на этой оси может поворачиваться не только вторая зажимная лапка относительно первой зажимной лапки, но и первая зажимная лапка относительно корпуса захвата. В предпочтительном варианте изобретения контактные поверхности губок первой зажимной лапки лежат в плоскости, ориентированной радиально к указанной оси вращения, а контактные поверхности второй зажимной лапки расположены под небольшим углом относительно такой радиальной плоскости, так что контактные поверхности губок второй зажимной лапки ориентированы параллельно контактным поверхностям губок первой зажимной лапки, когда расстояние между контактными поверхностями губок обеих лапок примерно соответствует средней толщине перемещаемого плоского предмета.
Благодаря расположению контактных поверхностей губок по существу в плоскости, ориентированной радиально к оси вращения, центр тяжести захваченного печатного изделия, когда оно перемещается в свободно подвешенном состоянии (первая зажимная лапка и застопоренная с ней вторая зажимная лапка могут свободно поворачиваться относительно корпуса захвата), расположен ниже оси вращения, так что по меньшей мере при таком перемещении в плоскости, параллельной направлению перемещения, не возникает вращающий момент, который должен восприниматься корпусом захвата или несущим органом, и предмет не изгибается. Благодаря описанной ориентации контактных поверхностей обеих захватных лапок относительно друг друга, при сжатии захватываемого печатного изделия между губками лапок удается свести к минимуму поступательные движения, направленные поперек движения зажимания.
Ниже заявленный захват раскрыт на примере конкретных вариантов его выполнения, описанных со ссылкой на приложенные чертежи, на которых показано следующее:
фиг.1-3 сбоку изображают предпочтительный вариант предложенного захвата в разных его состояниях.
фиг.4 и 5 представляют собой вид в направлении перемещения, изображающий периферические концы обеих зажимных лапок показанного на фиг.1-3 захвата.
фиг.6-9 изображают различные варианты губок предложенного захвата.
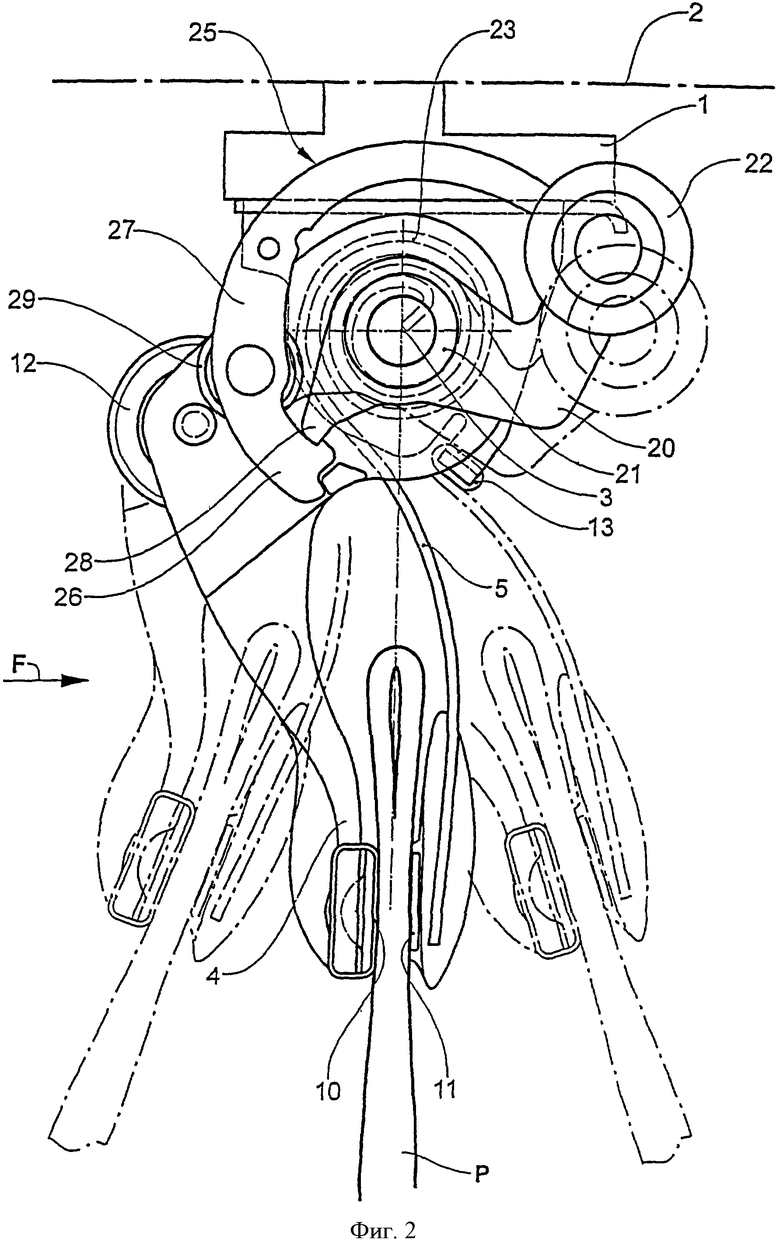
На фиг.1-3 показан предпочтительный вариант предложенного захвата, как он виден сбоку, т.е. если смотреть перпендикулярно направлению перемещения. Сплошной линией на фиг.1 обозначен захват в закрытом положении, с двумя зажатыми между губками печатными изделиями Р, которые перемещаются в свободно подвешенном состоянии; штрихпунктирной линией показан захват в открытом положении. На фиг.2 сплошной линией обозначен захват в закрытом положении, с одним печатным изделием Р, перемещаемым в свободно подвешенном состоянии; штрихпунктирном показан захват также в закрытом положении, при этом зажимные лапки показаны повернутыми относительно несущего органа или корпуса захвата. На фиг.3 показан захват в открытом положении.
Захват имеет корпус 1, установленный на несущем органе, который обозначен штрихпунктирной линией 2. На корпусе 1 размещена первая зажимная лапка 4, выполненная с возможностью поворота относительно оси 3 вращения. Относительно этой же оси 3 может поворачиваться вторая зажимная лапка 5, установленная на первой зажимной лапке 4. Ось 3 проходит перпендикулярно направлению F перемещения, первая зажимная лапка 4 является следящей лапкой. На своих периферических концах обе лапки имеют по паре 10, 11 губок, расположенных на некотором расстоянии друг от друга, если смотреть перпендикулярно движению поворота или направлению перемещения. На фиг.1-3 из каждой пары 10, 11 видна только одна губка. Более подробно губки описаны со ссылкой на фиг.4-9.
Угловое положение первой зажимной лапки 4 относительно корпуса 1 определяется, с одной стороны, кулачковым роликом 12, который прокатывается по соответствующим неподвижным кулачкам (не показаны), а с другой стороны - разжимной пружиной (не показана), которая помещена между первой и второй лапкой и удерживает их на максимально возможном расстоянии друг от друга. Крайние положения обеих лапок 4 и 5 ограничены соответствующими упорами на корпусе 1 (для второй лапки это упор 13). На фиг.1 штрихпунктирной линией обе зажимные лапки показаны в их крайнем положении, определяющемся разжимной пружиной и упорами.
Угловое положение второй лапки 5 относительно первой лапки 4 определяется кулачковым рычагом 20. Этот рычаг воздействует на вал 21, и на нем расположен еще один кулачковый ролик 22, причем вал установлен на первой лапке 4 с возможностью вращения, а вторая лапка 5 закреплена на валу. Дополнительный кулачковый ролик 22 также прокатывается по неподвижным кулачкам (не показаны). Если эти кулачки отжимают дополнительный ролик 22 книзу, то ролик вращает вал 21 по часовой стрелке, вследствие чего вторая лапка 5 перемещается вплотную к первой лапке 4. Так как вторая лапка 5 закреплена на валу 21 посредством спиральной пружины 23, вал может вращаться далее под напряжением пружины 23, даже если вторая лапка 5 не может быть повернута дальше в виду того, что ее губки 11 примкнули к губкам 10 первой лапки 4 или к зажатому между двумя лапками предмету. Благодаря такому дальнейшему вращению пружина 23 напрягается, и создается усилие зажима. Две лапки блокируются друг с другом при определенном угловом положении вала 21 относительно первой лапки 4.
Для обеспечения блокирования, на первой лапке 4 установлена с возможностью вращения стопорная защелка 25 со стопорным рычагом 26 и кулачковым рычагом 27, а кулачковый рычаг 20, закрепленный на валу 21, имеет стопорный элемент 28, взаимодействующий с рычагом 26. Благодаря неподвижному кулачковому элементу (не показан), воздействующему на кулачковый рычаг 26 защелки 25, стопорный рычаг 26 защелки 25 против силы действия напряженной регулировочной пружины 29 переводится из положения блокирования (фиг.1 и 2, сплошная линия) в холостое положение (фиг.3), при этом напряжение пружины 23 уменьшается, и разжимная пружина открывает захват. Когда вал 21 достигает некоторого углового положения относительно первой лапки 4, определяемого защелкой 25 и стопорным элементом 28, рычаг 26 и стопорный элемент 28 заскакивают в положение блокирования, которое может быть снова разомкнуто только посредством вышеописанного приведения в действие кулачкового рычага 27 стопорной защелки 25.
В том состоянии захвата, которое на фиг.1 обозначено сплошной линией, обе зажимные лапки заблокированы друг с другом. Неподвижный кулачок, по которому прокатывается ролик 12, определяющий угловое положение первой зажимной лапки 4, отсутствует, поэтому угловое положение определяется силой тяжести. Как было упомянуто выше, захват выполнен так, что губки 10, 11 обеих лапок 4, 5 удерживают зажатый между ними предмет Р направленным радиально к оси 3 вращения, поэтому центр тяжести предмета Р находится вертикально ниже оси вращения. Это означает, что предмет не сгибается под действием силы тяжести и не создает вращающий момент, который в противном случае воспринимался бы зажимными лапками 4, 5, корпусом 1 и, в конце концов, несущим органом.
Штрихпунктирной линией на фиг.1 показано открытое состояние захвата, при котором положения обеих зажимных лапок 4, 5 определяются разжимной пружиной и упорами 13 на корпусе 1.
Сплошной линией на фиг.2 показано закрытое и заблокированное состояние захвата, при этом угловое положение первой зажимной лапки 4 относительно корпуса 1 захвата определяется, например, силой тяжести. Посредством соответствующего управления кулачковым роликом 12 или соответствующего изменения положения корпуса 1 или несущего органа относительно силы тяжести, первую лапку 4 вместе с застопоренной относительно нее второй лапкой 5 можно перевести в другое угловое положение, например, в два положения, показанные на фиг.2 штрихпунктирной линией, причем в случае изменения положения корпуса захвата относительное положение оси вращения и центр тяжести захваченного предмета остаются неизмененными.
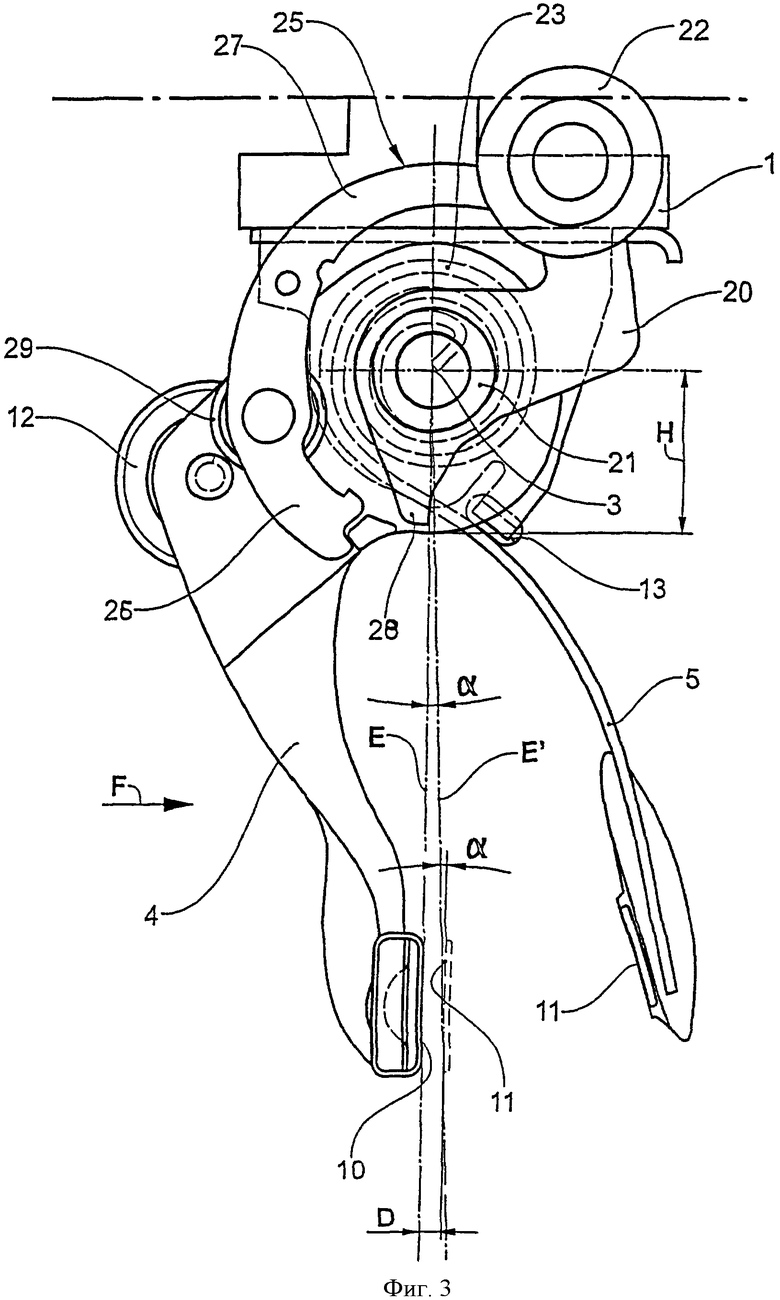
Фиг.3 иллюстрирует предпочтительную взаимную ориентацию контактных поверхностей губок 10, 11 обеих зажимных лапок 4, 5. Контактные поверхности губок 10 первой лапки 4 расположены в вертикальной плоскости Е, радиально ориентированной по отношению к оси 3 вращения. Вторая зажимная лапка 5 изображена в открытом положении, а штрихпунктирной линией обозначено то положение лапки 5, при котором опорные поверхности ее губок 11 ориентированы параллельно контактным поверхностям губок 10 первой зажимной лапки 4. Из этого чертежа видно, что плоскость ориентации контактных поверхностей губок 11 образует с соответствующей радиальной плоскостью Е' угол α. Этот угол соответствует углу поворота между первой и второй зажимными лапками на расстояние D, равное средней толщине перемещаемых предметов.
Из фиг.1-3 видно, что предлагаемый захват имеет весьма компактную конструкцию, которая при одинаковой высоте с известными захватами обеспечивает существенно большую глубину зева захвата. Это означает, что часть зажимания захваченного предмета может быть больше удалена от его края, чем в известных захватах. Благодаря большей глубине зева захвата части зажимания захваченного предмета дальше удалены от его края, то есть они находятся ближе к его центру тяжести (меньшие плечи рычага для действующих сил). Благодаря этому также становится возможным, надежное захватывание и перемещение с удержанием группы печатных изделий, ступенчато расположенных друг на друге, как показано на фиг.1. Свой вклад в компактность конструкции вносит кулачковый рычаг 27 защелки 25, который движется в направлении перемещения не так, как это происходит в устройствах известного уровня техники.
Согласно предпочтительному варианту предложенного захвата, который представлен на фиг.1-3, расстояние Н между осью вращения и крайней внутренней точкой зева захвата снижено до минимума, вследствие чего захват имеет глубину зева, составляющую примерно 75% расстояния между осью вращения и губками.
На фиг.4 показан пример периферического конца первой зажимной лапки 4 предложенного захвата, если смотреть параллельно направлению перемещения. С обеих сторон этот периферический конец имеет плечо 30, выступающее от лапки по существу параллельно оси 3 вращения. На каждом плече предусмотрено по одной губке 10, расположенной как можно дальше наружу. Губки, например, кольцевые, надеты на плечи 30 с их свободного конца. Первая губка выполнена, например, из пластмассы, а плечи выполнены не изгибаемыми или весьма незначительно упругоизгибаемыми.
На фиг.5 показан пример периферического конца второй зажимной лапки 5 предложенного захвата. Эта лапка также содержит боковые плечи 30, на наружных участках которых имеются губки 11. Губки 11, например, защелкнуты или вставлены в отверстия 32 плеч 30. Плечи 30 второй зажимной лапки 5 являются, например, частью периферической насадки 31, насаженной на ту часть 23' спиральной пружины (23 на фиг.1-3), которая образует лапку 5. При этом насадка предпочтительно выполнена так, что плечи 30 могут упруго изгибаться параллельно усилию прижима, то есть перпендикулярно плоскости бумаги на фиг.5. В предпочтительном случае насадка согнута перпендикулярно поверхности бумаги, в результате чего губки выдаются в направлении первой лапки за средний участок насадки. Насадка 31 выполнена, например, из пластмассы, а пружина 23 - из пружинной стали.
В случае транспортеров, предназначенных для перемещения предметов в формате и весе газет и журналов, две губки одной зажимной лапки предпочтительно размещать на расстоянии по меньшей мере 10 см друг от друга.
Вышеописанными плечами и двумя губками можно оснастить только одну зажимную лапку, в то время как вторая лапка соответствующей ширины будет иметь единственную губку соответствующей ширины.
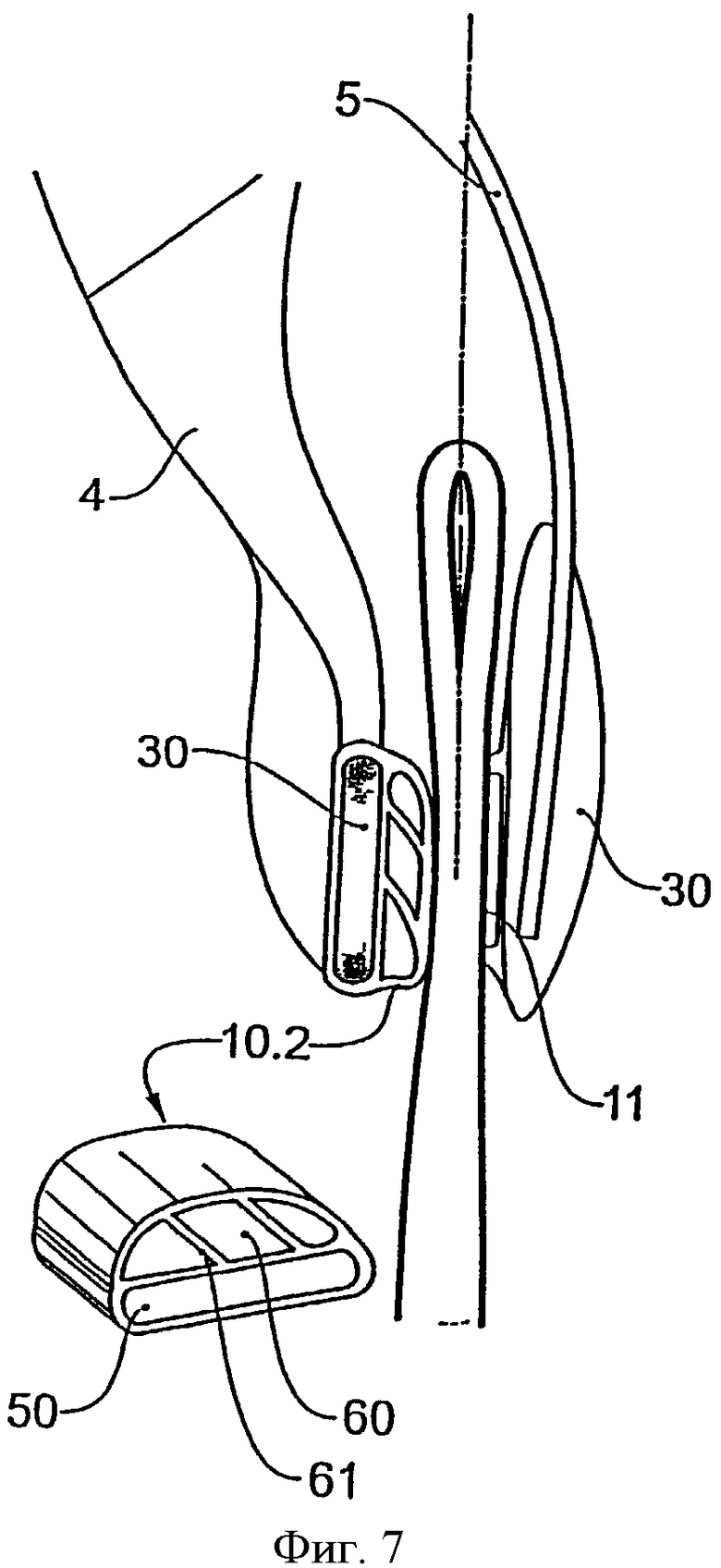
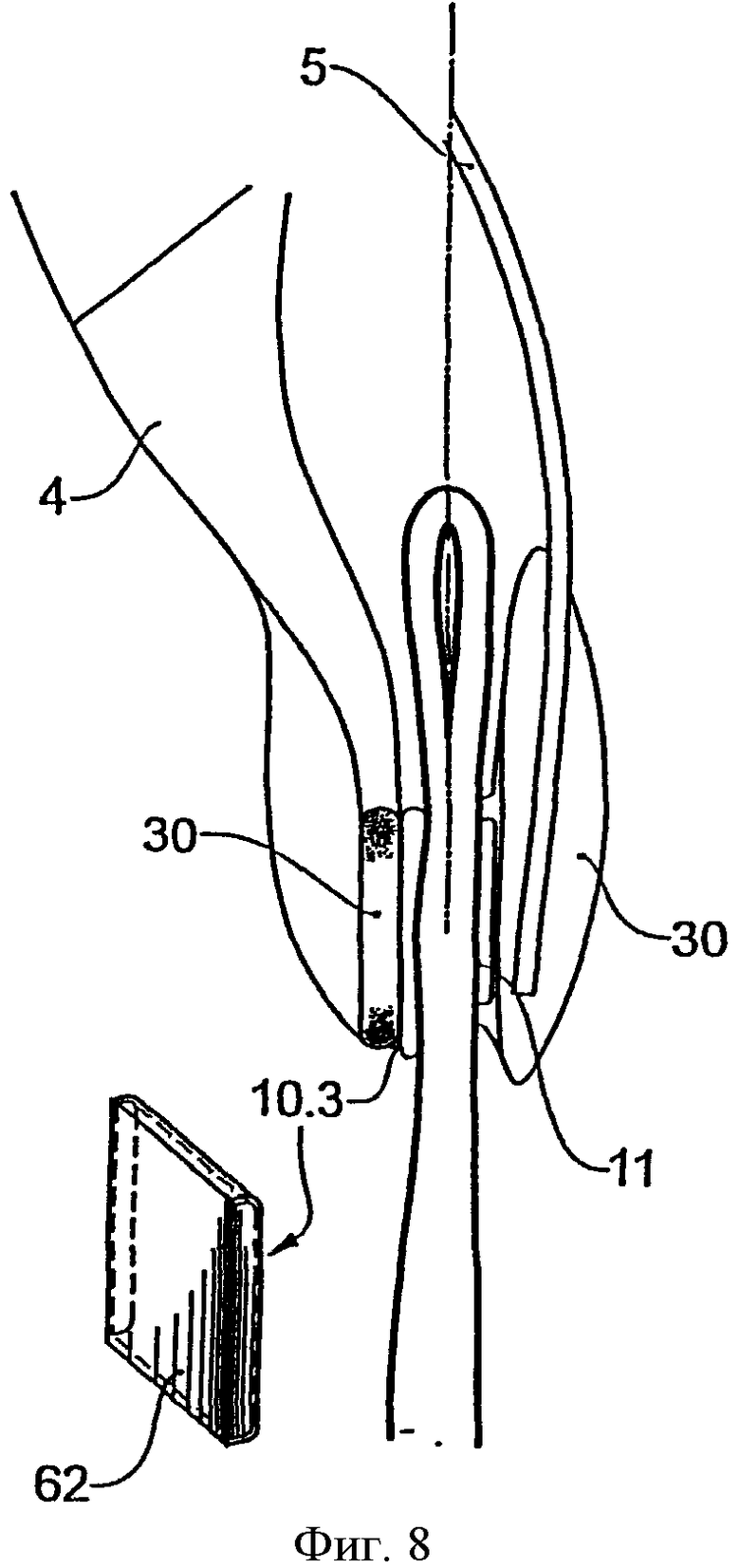
На фиг.6-9 показаны боковые проекции различных вариантов губок 10, 11 для зажимных лапок 4, 5 предложенного захвата. На всех фиг.6-9 губка 11 второй зажимной лапки представляет собой профиль с полостью 40, например, профиль, выполненный за одно целое с плечом 30. Полый профиль имеет упругодеформируемое покрытие, которое обращено к губке 10 первой зажимной лапки 4 и, таким образом, образует контактную поверхность губки 11.
Губки 10.1-10.4 первой зажимной лапки 4 представлены на фиг.6-9 также отдельно в трехмерном изображении.
Согласно фиг.6 зажимную губку 10.1 насаживают на плечо 30 с его свободного конца. Для этого губка содержит трубчатый опорный элемент 50, обладающий ограниченной эластичностью. В трубчатом опорном элементе 50 размещена внутренняя пластина 51, посредине которой имеется полусфера 52. В соответствующем месте плеча 30 имеется углубление 53, соответствующее полусфере 52, причем глубина углубления немного меньше высоты полусферы 52. Когда губку 10.1 насаживают на плечо 30, полусфера 52 размещается в углублении 53, в результате чего пластина 51 является установленной на плече 30 при помощи шарового шарнира. Благодаря такому решению внутренняя пластина 51 может со всех направлений адаптироваться к контактной поверхности противоположной губки или к захваченному предмету.
На фиг.6 дополнительно с той стороны плеча 30, которая является удаленной от захватываемого предмета, изображен формованный элемент 55, который во взаимодействии с выпуклостью 56 трубчатой опоры 50 губки 10.1 обеспечивает крепление губки к плечу.
Губку 10.2, изображенную на фиг.7, также насаживают на плечо 30 сбоку. Для этого она содержит трубчатый опорный элемент 50, имеющий ограниченную эластичность. Этот опорный элемент 50 имеет открытый сбоку полый профиль 60, например, многокамерный, который образует подушечную контактную поверхность на предпочтительно наклонных распорках 61.
Губка 10.3, изображенная на фиг.8, по существу представляет собой плоскую подушку 62, которая закрыта со всех сторон, заполнена жидкостью и, например, наклеена на плечо 30.
Губка 10.4, представленная на фиг.9, состоит из плоского блока 63 упругодеформируемого материала (например, материала, обладающего вязкоупругой деформацией), причем блок 63 закреплен на плече 30, например, путем приклеивания.
На фиг.6-9 изображены губки, подходящие для предложенного захвата. Под действием прикладываемого к лапкам зажимного усилия эти губки могут адаптироваться к противоположной губке или зажатому предмету. Комбинируя различные признаки представленных губок, можно получать дополнительные варианты их осуществления. В частности, губки 10 первой зажимной лапки 4, можно использовать в качестве губок 11 второй лапки 5, и наоборот.
Контактные поверхности губок предпочтительно обрабатывать таким образом, чтобы они приобретали свойство отталкивания краски, - это представляет дополнительную меру против смазывания печатных изделий. Соответствующие виды обработки известны из других применений (например, ленточных транспортеров).
На фиг.1-3 изображен предпочтительный вариант предложенного захвата. Дополнительные варианты осуществления этого захвата отличаются от представленного захвата, например, следующими признаками:
- первая зажимная лапка 4 не является поворачиваемой относительно корпуса 1 захвата;
- вторая зажимная лапка 5 представляет собой упругоизгибаемый элемент, закрепленный на валу без спиральной пружины, а две зажимные лапки стопорятся относительно друг друга;
- обе зажимные лапки представляют собой упругоизгибаемые элементы;
- между двумя зажимными лапками отсутствует разжимная пружина;
- плечи 30 обеих зажимных лапок или только второй лапки выполнены упругоизгибаемыми;
- одна из двух зажимных лапок имеет боковые плечи 30, каждое из которых оснащено губкой, при этом другая лапка имеет лишь одну губку;
- губки по меньшей мере одной зажимной лапки являются не адаптируемыми;
- отсутствуют средства блокировки обеих зажимных лапок в закрытом положении.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ крепления печатной формы на формном цилиндре | 1991 |
|
SU1814621A3 |
| Захватное устройство для деталей | 1980 |
|
SU956271A1 |
| ЗАХВАТ ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ АМПУЛ С ПУЧКАМИ ОТРАБОТАВШИХ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 2018 |
|
RU2684394C1 |
| Захватное устройство | 1982 |
|
SU1013264A1 |
| РУЧНОЙ ИНСТРУМЕНТ ДЛЯ ЗАХВАТА | 2008 |
|
RU2484942C2 |
| Захватное устройство | 1987 |
|
SU1495122A1 |
| Сборочно-захватное устройство | 1987 |
|
SU1495121A1 |
| Схват манипулятора | 1977 |
|
SU662341A1 |
| ЗАКОЛКА ДЛЯ ВОЛОС, ОСНАЩЕННАЯ СОЕДИНИТЕЛЬНЫМ ЭЛЕМЕНТОМ, ДЕЙСТВУЮЩИМ ПРИ РАСТЯЖЕНИИ | 2004 |
|
RU2360586C2 |
| Захватное устройство | 1984 |
|
SU1237418A1 |





Изобретение относится к области полиграфии и может быть использовано для захватывания и перемещения печатной продукции. Захват имеет две зажимные лапки. Лапки поворачиваются друг относительно друга в сомкнутое и разомкнутое положения. В сомкнутом положении лапки прижимаются друг к другу. Концы лапок оснащены двумя гибкими плечами. Плечи отходят вбок от лапки в направлении действия зажимной силы. На свободном конце каждого плеча предусмотрена губка. Контактная поверхность губки адаптируется к контактной поверхности противоположной губки или зажимаемому предмету под действием зажимной силы. Обеспечивается возможность зажима широкого ассортимента печатной продукции. Исключается возникновение сдвигающих сил между губками зажимных лапок и захваченным предметом. 15 з.п. ф-лы, 9 ил.
1. Захват, предназначенный для захватывания и перемещения с удержанием плоских предметов (Р), в частности печатной продукции, такой как газеты, журналы, брошюры, или небольших групп этих изделий, содержащий:
- корпус,
- первую зажимную лапку, имеющую губки на своем периферическом конце,
- вторую зажимную лапку, имеющую губки на своем периферическом конце и выполненную с возможностью поворота вокруг оси вращения относительно первой лапки,
- средство создания зажимной силы,
причем данный захват можно переводить в сомкнутое и разомкнутое положение путем поворота первой и второй зажимных лапок относительно друг друга, при этом в сомкнутом положении губки обеих зажимных лапок прилегают друг к другу или к зажатому предмету и прижимаются друг к другу под действием зажимной силы, причем первая зажимная лапка выполнена с возможностью поворота относительно корпуса захвата, вследствие чего обе зажимные лапки обладают возможностью свободного поворота относительно корпуса, по меньшей мере, в сомкнутом положении, причем захват дополнительно содержит:
- два проходящих в поперечном направлении плеча, которые размещены на периферическом конце, по меньшей мере, одной из указанных двух зажимных лапок и являются упруго изгибаемыми в направлении, параллельном направлению действия зажимной силы,
- губку с контактной поверхностью, предусмотренную на каждом плече, вследствие чего зажимаемый предмет зажимается в двух частях зажимания, находящихся на расстоянии друг от друга.
2. Захват по п.1, в котором обе зажимные лапки на своих периферических концах имеют размещенные сбоку упруго изгибаемые плечи, каждое из которых содержит губку.
3. Захват по п.1 или 2, в котором контактные поверхности губок под действием зажимной силы могут адаптироваться к противоположной губке или к зажатому предмету.
4. Захват по п.3, в котором контактные поверхности губок установлены на плече при помощи шарового шарнира.
5. Захват по п.3, в котором контактные поверхности губок предусмотрены на плечах посредством упруго-деформируемого полого профиля, упруго-деформируемого материала или жидкости.
6. Захват по п.1, в котором контактные поверхности губок обработаны таким образом, что они обладают свойством отталкивания краски.
7. Захват по п.1, в котором контактные поверхности губок, по меньшей мере, одной зажимной лапки лежат в плоскости, ориентированной радиально к оси вращения.
8. Захват по п.7, в котором контактные поверхности губок первой зажимной лапки лежат в плоскости, ориентированной радиально к оси вращения, при этом контактные поверхности губок второй зажимной лапки образуют угол посредством плоскости, ориентированной радиально к оси вращения, вследствие чего контактные поверхности губок обеих лапок являются ориентированными параллельно друг другу, когда между губками зажат плоский предмет.
9. Захват по п.1, в котором губки содержат трубчатый опорный элемент и насажены на плечи сбоку.
10. Захват по п.1, в котором имеется средство блокировки, выполненное с возможностью блокировки зажимных лапок в сомкнутом положении.
11. Захват по п.1, в котором вторая зажимная лапка посредством спиральной пружины прикреплена к валу, установленному с возможностью вращения на первой зажимной лапке, причем указанная спиральная пружина обвита вокруг вала.
12. Захват по п.10 или 11, в котором указанное средство блокировки воздействует на первую зажимную лапку и вал второй зажимной лапки.
13. Захват по п.1, в котором предусмотрена разжимная пружина, посредством которой обе зажимные лапки удерживаются в разомкнутом положении.
14. Захват по п.1, в котором глубина зева захвата составляет примерно 75% от расстояния между губками и осью вращения.
15. Захват по п.11, в котором вторая зажимная лапка образована частью спиральной пружины, при этом плечи являются частью насадки, насаженной на периферический участок спиральной пружины.
16. Захват по п.15, в котором насадка выполнена из пластмассы, а спиральная пружина - из пружинной стали.
| US 4681213 А, 21.07.1987 | |||
| DE 3102242 A1, 04.02.1982 | |||
| US 5575379 A, 19.11.1996 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ ПЕЧАТНЫХ ИЗДЕЛИЙ | 1999 |
|
RU2229429C2 |

