t
Изобретение относится к робототехнике, в частности к захватным устройствам промышлекных роботов.
Целью изобретения является расширение технологических возможностей путем обеспечения возможности вращения приводного вала в разные стороны .
На фиг. 1 изображено захватное устройство для захвата полых детале за внутренние поверхности, продольный разрез; на фиг. 2 - то же, дд1я захвата деталей за наружную поверхность.
Захватное устройство (фиг. 1) содержит привод 1, приводной вал 2, установленный в подшипнике 3 корпуса 4 и подшипнике 5 головки 6.. Корпус 4 и головка 6 имеют цилиндрическую форму и соединены с помощью шар крв 7, причем корпус 4 и головка 6 в этом случае служат соответственно обоймой и втулкой подшипникового содинения. Захватные губки 8 выполнены в виде двуплечих рычагов и шар- нирно закреплены на выступах 9 в нижней части головки 6. К верхним плечам захватньш рычагов 8 прикреплены одним концом гибкие нерастягивающиеся элементы 10, представляющие собой приводной узел, другие концы которых закреплены на валу 2, На гибкие элементы 10 надеты упруги элементы 11, представляющие собой, например, пружины, упирающиеся одним концом в верхние плечи захватных губок 8, а другим - в углубления 12 на головке 6. В углублениях 12 головки 6 выполнены отверстия 13 для прохождения в них гибких нерастягивающихся элементов 10. В Hi-геней части корпуса 4 установлен фиксатор 14 заходящий в углубление 15 в верхней части головки 6. Конечньгй выключатель 16 служит для получения информации (воздействия на привод I) в случае, если детали не окажется в зоне захватывания. Вал 2 с приводом 1 соединены с помощью муфты 17.
Захватное устройство целесообразно использовать для захвата полых деталей за внутренние поверхности. При необходимости.захватывания деталей за наружную поверхность (например, для гаек, шайб и т.д.) предлагается другая схема расположения губок 8, гибких 10 и упругих 11 эле- ментов на головке 6 схвата (фиг.2).
374182
В этой конструкции захватные губки 8 выполнены в виде одноплечих рычагов и щарнирно закреплены своими верхними концами на выступах 9 го- 5 ловки 6. Выступы 9 расположены при этом в верхней части головки 6, а углубления 12 с отверстиями 13 и гибкие нерастягивающиеся элементы
10с пружинами 11 находятся в нижней 10 части головки 6. Гибкие нерастягивающиеся элементы 10 закреплены одним концом на нижней части вала 2,
а другим - на средней части соответствующей губки 8.
5 Устройство работает следующим образом.
В исходном положении захватные губки 8 (фиг.1) сведены (на фиг.2 - разведены) под действием упругих 20 элементов, вал 2 не вращается, гyфтa 17 отключена. При захвате детали включается муфта 17, привод 1 начинает вращаться, при этом вращается приводной вал 2, который наматы- 25 вает на себя гибкие нерастягивающиеся элементы 10, преодолевая усилие упругих элементов 11 и тем самым раздвигая (на фиг. 2 сдвигая) захватные губки 8. Фиксатор 14 не вы- 30 ходит из углубления 15 до тех пор, пока губки 8 не дойдут до детали и не захватят ее. После захватывания детали фиксатор 14 силой вращения приводного вала 2 выводится из уг- 35 лубления 15 и скользит по поверхности головки 6. При этом головка 6 с захваченной деталью может вращаться в ту или другую сторону в зависимости от вращения привода . Это вра- 40 щение может быть использовано, например, при сборочных, полировочных операциях и т.д. Сила трения фиксатора 14 о головку 6 не дает возможности губкам 8 отпускать деталь. Сила при- фиксатора 14 к головке б регулируется пружиной, и тем самым регулируется сила сжатия детали губками 8.
Для отпускания детали останавли- вают привод 1, отключают муЛту 17, и под действием упругих элементов
11гибкие элементы 10 сматываются с вала 2, вращая его в противоположную сторону, при этом захватные губ5 ки 8 сходятся (расходятся), освобождая деталь.
При использовании изобретения расширяются технологические возмож3
ности, упрошается конструкция и повышается надежность работы устройства, поскольку обеспечивается воз
можность захватывания дета- щенне ее как против, так и стрелке, т.е. в обоих Hanpai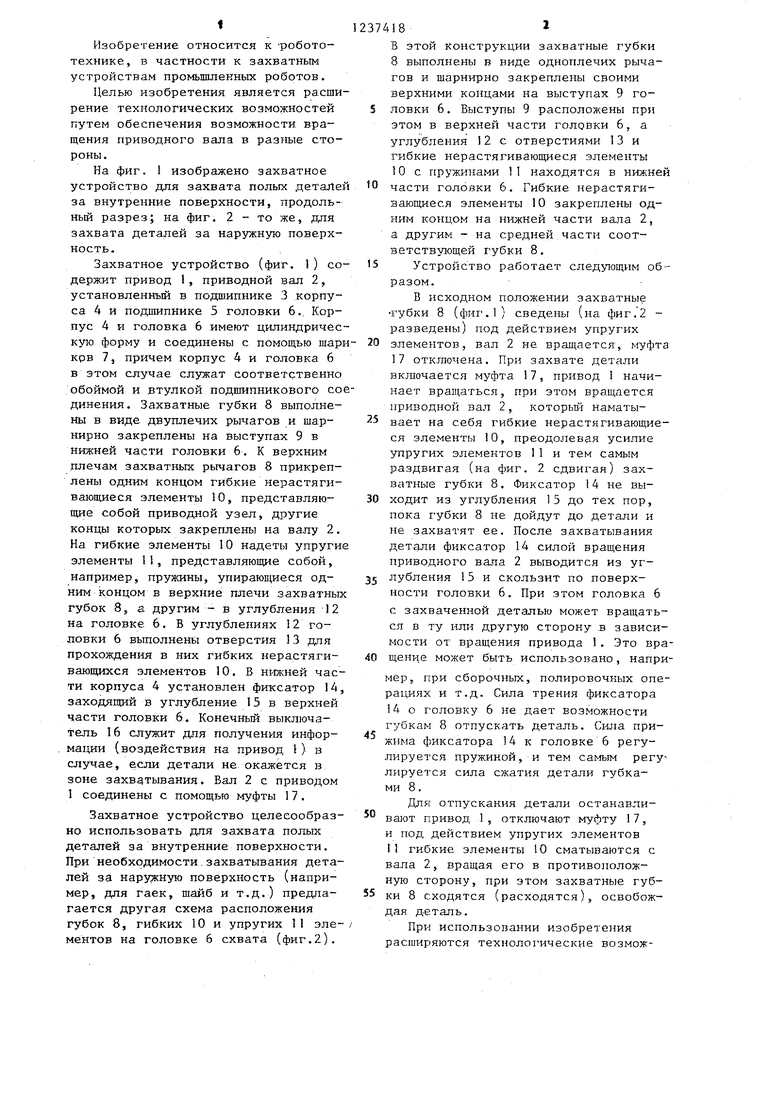
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1984 |
|
SU1283090A1 |
| Захватное устройство | 1982 |
|
SU1013264A1 |
| УСТРОЙСТВО ДЛЯ ВЕРТИКАЛЬНОЙ ОТТЯЖКИ ПОЛОТНА НА АВТОМАТИЧЕСКОЙ ТРИКОТАЖНОЙ МАШИНЕ, ПРЕИМУЩЕСТВЕННО ПЛОСКОВЯЗАЛЬНОЙ | 1992 |
|
RU2078861C1 |
| Схват | 1981 |
|
SU952581A1 |
| Захватное устройство | 1989 |
|
SU1662842A1 |
| Кистевой узел манипулятора | 1990 |
|
SU1712142A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Захватное устройство для деталей | 1980 |
|
SU956271A1 |
| РУЧНОЙ ИНСТРУМЕНТ ДЛЯ СТОМАТОЛОГИЧЕСКИХ ИЛИ ХИРУРГИЧЕСКИХ ЦЕЛЕЙ | 2006 |
|
RU2372874C2 |

1В
11
фиг. 2
Редактор А. Лежнина
Составитель А. Алексеев
Техред Г.Гербер Корректор Е. Сйрохман
Заказ 3237/17
Тираж 1031
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Подписное
| Схват манипулятора | 1982 |
|
SU1076279A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
