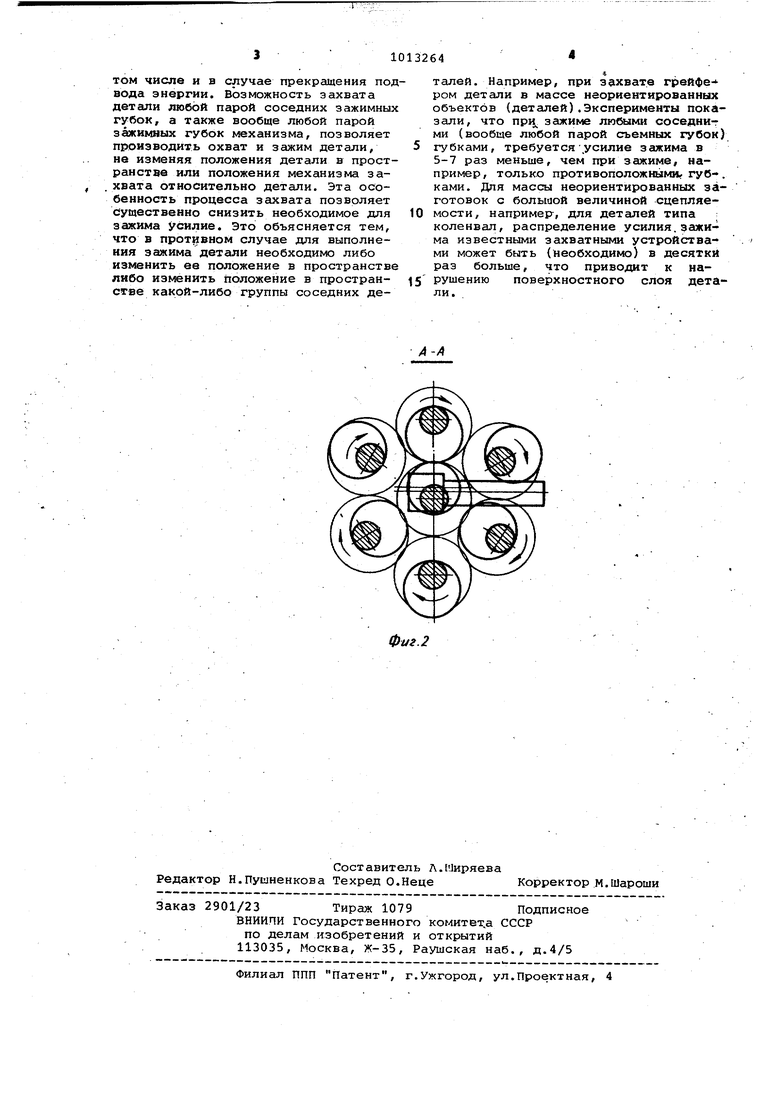
Изобретение относится к машиностр ению, к устройствам для выполнения вспомогательных операций, связанных изменением положения деталей в прост ранстве.. Известна захватная головка маниНулятора, содержащая корпус, в котором размещен механизм зажима в вида Плоской спиральной пружины, и зажим,Яые губки, выполненные в виде стержНей, установленных между витками npy Ясины и в укрепленной на торцах корпу са отверстиях перфорированной пласти ны и привода ill}. Недостатком.этой захватной головк является невозможность захвата деталей снизу или не попадающих в центральну часть механизма захвата, например ме ду соседними зажимными губками, а акже невозможность захйата за внутренние поверхности, так как захват производится при взаимодействии противоположных зажимных губок. Захват детали соседними губками не производится, так как они имеют возможность перемещаться в направлении, перпенди kyЯяpнoм радиальному перемещению. Целью изобретения является расширение технологических возможностей Механизма захватывания за счет обесп чения возможности захвата в любом участке механизма захватывания, что позволяет осуществигь захват не только объекта сложной формы, находящегося в пентре захватного устройства, но и объекта, произвольно расположенного в пространстве, т;е. неориентированного,в том числе изахйат детали, йз навала. Цель достигается тем, что в захват ном устройстве, содержащем привод, корпус, механизм зажима, имеющий зубчатые колеса и шестерню, а также зажимные губки, выполненные в виде подпружиненных относительно корпуса пальцев, один из которых установлен а центральном отверстии зубчатого колеса, а остальные связаны с механизмом зажима через шестерни, пальцы выполнены в виде стержней, имеющих эксцентриковые участки в нижйей части причем направления эксцентриситетов стержней 8 плоскости.их поперечного сечения не совпадают. На фиг.1 изображено захватное устройство для захвата неориентированных деталей типа валов и фланцев; на фиг.2 - разрез А-А на фиг.1. Захватное устройство содержит корпус If укрепленный в нем привод 2 вра щения зажимных губок с механизмом зажима в виде зубчатого колеса 3, имеющим центральное отверстие со шпоночным пазом, Б котором с возможностью осевого перемещения установлена центральная зажимная губка 4 со шпонкой 5. Взаимодействующие с зубчатым колесом 3 шестерни б связаны с верхним : концом 3 ажимных губок 4, имеющих в нижней части эксцентриситет и пояпру:жиненных в осевом .направлении пружинами 7 сжатия. Зажимные губки 4 установлены в корпусе 1 по подвижной посадке с возможностью осевого перемещения и вращения. Устройство работает следующим образом. При подводе захватного устройства к неориентированной детали 8 или к массб неориентированных деталей зажимные губки 4 взаимодействуют с объектом захвата. При этом захватное устройство ориентируется так, чтобы осевое перемещение зажимных губок 4 совпало с направлением подвода захватного устройства к объекту захвата или к массе неориентированных объектов. Усилие, прикладываемое к захватно с/ устройству для его перемещения в направлении подвода захватного устройства, должно быть не менее усилия ежа тия пружин 7, подпружинивающих зажимные губки 4. Выбор параметров усилия зажима, усилия, подпружинивания, эксцентриситет и т.д. определяются периметрами объекта захвата и массы неориентированных объектов, например плотность укладки, степень ориентации деталей, сцепляемость, а также схемой перемещения захватного устройства по поверхности массы неориентированных деталей. При взаимодействии механизма захв.ата с неориентированным объектом, расположенным в свободном пространстве или в массе неориентированных объектов, зажимные губки при попадании торцевой части губки на объект остаются неподвижными относительно объекта , губки, не попадающие на объикт захвата, перемещаются в направлении подвода захватного устройства. Таким образом, захватное устройстВО охватывает некоторыми губками объект захвата. После этого включается привод 2 вращения. Ведущее зубчатое колесо 3 вращает зажимные губки 4 дс заклинивания какой-либо пары зажимных губок 4 с деталью 8, т.е. происходит зажим детали 8 (фиг.2). Затем осуществляется перенос детали 8 манипулятором (не показан в предназначенное место iнапример, ориентатор ) при любой ориентации захвата в пространстве и детали относительно захватного устройства. Для освобождения детали включается в противоположном направлении привод 2 вращения, деталь освобождается, зажимные губки 4 .занимают исходное положение, выдвигаясь под действием пружин 7. Устройство готово к следующей операции . Наличие эксцентриситета губок повышает надежность зажима детали, в
том числе и в случае прекращения подвода энергии. Возможность захвата детали любой парой соседних зажимных губок, а также вообще любой парой зажимных губок механизма, позволяет производить охват и зажим детали, не изменяя положения детали в пространстве или положения механизма захвата относительно детали. Эта особенность процесса захвата позволяет Существенно снизить необходимое для зажима усилие. Это объясняется тем, что в противном случае для выполнения зажима детали необходимо либо изменить ее положение в пространстве либо изменить положение в пространстве какой-либо группы соседних деталей. Например, при захвате грейфером детали в массе неориентированных объектов (деталей).Эксперименты показали, что npir зажиме любыми соседни-г ми (вообще любой парой съемных губок) губками, требуется усилие зажима в 5-7 раз меньше, чем при зажиме, например, только противоположными губ-. ками. Для массы неориентированных заготовок с большой величиной сцепляе0мости, например, для деталей типа : коленвал, распределение усилия.зажима известными захватными устройствами может быть (необходимо) в десятки раз больше, что приводит к нарушению поверхностного слоя дета5ли.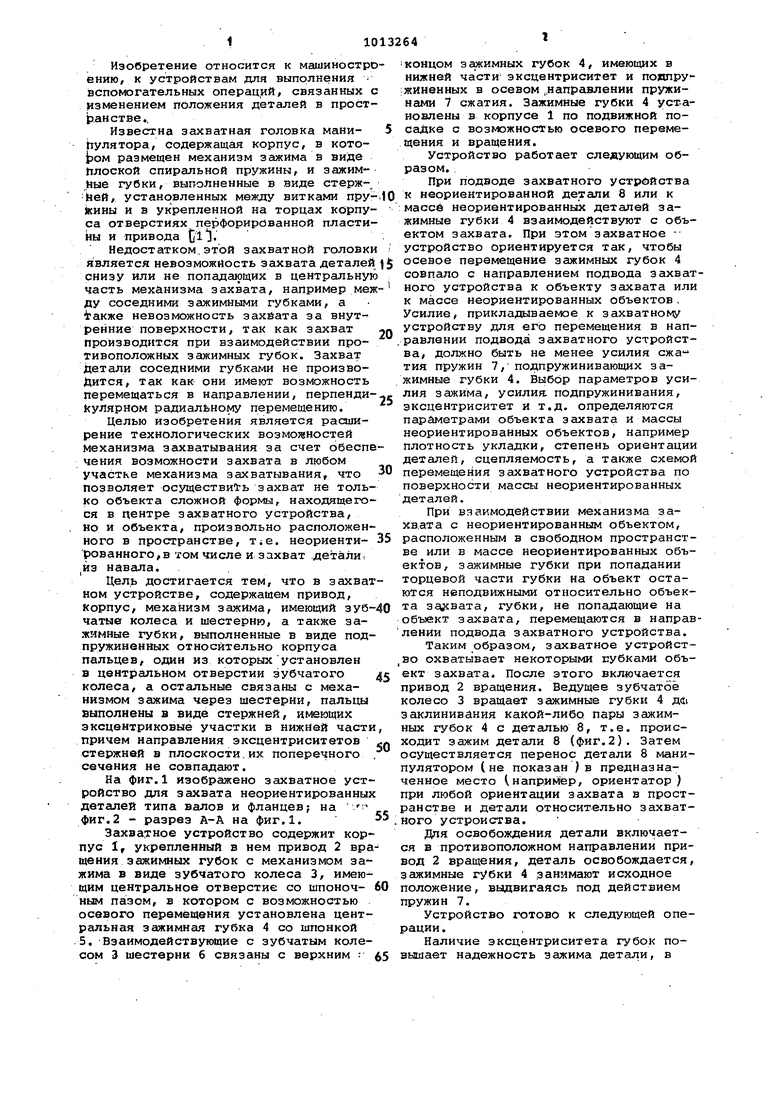
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1983 |
|
SU1220788A1 |
| Захватное устройство | 1985 |
|
SU1283092A1 |
| Захватное устройство | 1987 |
|
SU1465312A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Устройство для захвата неориентированных деталей типа валов | 1983 |
|
SU1140944A2 |
| Захват промышленного робота | 1985 |
|
SU1288051A1 |
| Захватное устройство | 1991 |
|
SU1815213A1 |
| Захват промышленного робота | 1987 |
|
SU1509247A1 |
| Захватное устройство | 1984 |
|
SU1194676A1 |
| Схват манипулятора | 1983 |
|
SU1087327A1 |
ЗАХВАТНОЕ УСТРОЙСТВО, содер. kamee привод, корпус, механизм зажима, : Имеющий зубчатое колесо и шестерни,а iтакже зажимные губки, выполненные в виде подпружиненных относительно корпуса пальцев, один из которых установлен в центральном отверстии зубчатого колеса, а остальные связаны с механизмом зажима через шестерни, отличающееся тем,-ЧТО, с целью расширения технолбгических возможностей, пальцы выполнены в виде стержней, имеющих эксцентриковые участки в ниж.ней части причем направления эксцентриситетов стержней в плоскости их поперечного сечения не совпадают. СО IND да 4
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захватная головка манипулятора | 1978 |
|
SU667397A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
