Изобретения относятся к области радиолокации и могут быть использованы в радиолокационных станциях (РЛС) для обнаружения целей в условиях действия импульсных помех.
В современных РЛС широко используются зондирующие сигналы с внутри-импульсной модуляцией и достаточно большой длительности. Известный способ обнаружения таких сигналов, отраженных от целей, включает временное сжатие принимаемого сигнала с помощью согласованной фильтрации (Справочник по радиолокации, под ред. М.Сколника, т.3, М., Сов. радио, 1979, с.400).
Известно устройство радиолокационного обнаружения сигналов, отраженных от целей, содержащее согласованный фильтр (Справочник по радиолокации, под ред. М.Сколника, т.3, М., Сов. радио, 1979, с.400-402).
Известные способ и устройство позволяют значительно уменьшить влияние импульсных помех в виде мешающих сигналов, не согласованных с фильтром, однако имеют низкую защищенность от импульсных помех в виде мешающих сигналов большой мощности, рассогласованных с фильтром. Термин «рассогласованный принимаемый сигнал», заимствованный из источника: Современная радиолокация. Анализ, расчет и проектирование систем. Пер. с английского. Под ред. Ю.Б.Кобзарева, М., Сов. радио, 1969, с.222, обозначает принимаемый сигнал, не полностью согласованный с фильтром.
Наиболее близкий способ обнаружения отраженного от цели сигнала включает временное сжатие принимаемого сигнала с помощью согласованной фильтрации, выделение огибающей сигнала и последующее ее сравнение с порогом обнаружения q0, при превышении которого принимается решение об обнаружении цели (Теоретические основы радиолокации. Под ред. Ширмана Я.Д., «Сов. радио», 1970, с.110-114). Порог обнаружения q0 устанавливают исходя из заданного уровня ложных тревог.
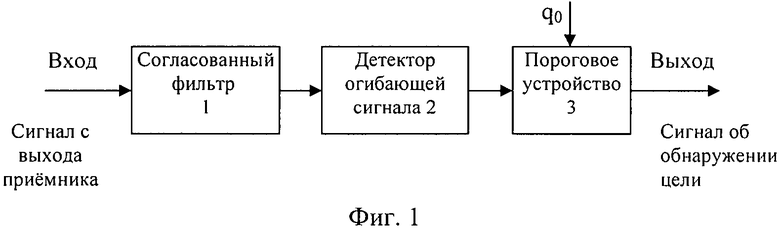
Наиболее близкое устройство (фиг.1) содержит последовательно соединенные согласованный фильтр 1, детектор огибающей сигнала 2, пороговое устройство 3 (Теоретические основы радиолокации. Под ред. Ширмана Я.Д., «Сов. радио», 1970, с.114, рис.3.19).
Наиболее близкие технические решения позволяют эффективно обнаруживать зондирующие сигналы, отраженные от целей, и подавлять импульсные помехи в виде сигналов, не согласованных с фильтром. Однако если импульсная помеха представляет из себя сигнал, рассогласованный с фильтром, и при этом ее мощность достаточно велика, то на выходе согласованного фильтра ее огибающая может превысить порог обнаружения, и в этом случае будет обнаружена как сигнал, отраженный от цели. Это является недостатком наиболее близких технических решений.
Решаемой задачей (техническим результатом) является увеличение защищенности РЛС от импульсных помех в виде рассогласованных сигналов большой мощности.
Указанный технический результат достигается тем, что в способе радиолокационного обнаружения сигналов, отраженных от целей, включающем согласованную фильтрацию принимаемого сигнала с последующим выделением огибающей сигнала и сравнением ее в каждой дискрете по дальности с порогом обнаружения, согласно изобретению, для дискрет по дальности, в которых произошло превышение порога обнаружения, определяют отношение значения огибающей сигнала до согласованной фильтрации, задержанного на время обработки сигнала при согласованной фильтрации, к значению огибающей сигнала после согласованной фильтрации, полученное отношение сравнивают с заданным пороговым значением, установленным исходя из допустимого рассогласования принимаемого сигнала, отраженного от цели, принимают решение об обнаружении сигнала, отраженного от цели, если указанное пороговое значение не превышено.
Указанный результат достигается также тем, что в устройстве радиолокационного обнаружения сигналов, отраженных от целей, содержащем последовательно соединенные согласованный фильтр, детектор огибающей сигнала и пороговое устройство, согласно изобретению, введены второй детектор огибающей сигнала, устройство задержки, вычислитель отношения амплитуд огибающих сигналов, предназначенный для вычисления отношения значения огибающей сигнала до согласованного фильтра к значению огибающей сигнала после согласованного фильтра, второе пороговое устройство и схема «И», при этом соединенные между собой вход согласованного фильтра и вход второго детектора огибающей сигнала являются входом устройства радиолокационного обнаружения, выход второго детектора огибающей сигнала соединен со входом устройства задержки, первый и второй входы вычислителя отношения амплитуд огибающих сигналов соединены соответственно с выходом детектора огибающей сигнала и выходом устройства задержки, а выход его соединен со входом второго порогового устройства, выход порогового устройства и выход второго порогового устройства соединены соответственно с первым и вторым входами схемы «И», выход которой является выходом устройства радиолокационного обнаружения.
Поясним суть изобретения.
Известно, что при согласованной фильтрации уровень сжатого сигнала с внутриимпульсной модуляцией зависит от того, насколько принимаемый сигнал близок по структуре к зондирующему сигналу.
Если импульсная помеха представляет собой сигнал, рассогласованный с фильтром, и имеет достаточно большую мощность, то после фильтрации она может создать сжатый сигнал, огибающая которого превышает порог обнаружения q0, и быть обнаружена как сигнал, отраженный от цели.
Как уже отмечалось, принятый сигнал считается рассогласованным, если он не полностью согласован с фильтром (Современная радиолокация. Анализ, расчет и проектирование систем. Пер. с английского. Под ред. Ю.Б.Кобзарева, М., Сов. радио, 1969, с.222).
В изобретении для уменьшения влияния помех в виде сигналов, рассогласованных с фильтром, окончательное решение о принятом сигнале, превысившем порог обнаружения q0, принимается после дополнительного анализа, при котором оценивается степень рассогласования принимаемого сигнала с согласованным фильтром. В качестве меры рассогласования принимаемого сигнала с согласованным фильтром использовано отношение значения огибающей принимаемого сигнала до согласованной фильтрации Uог к значению огибающей сигнала после согласованного фильтра Uог. ф:
При этом сигнал Uог перед вычислением (1) задерживается на время, равное времени его обработки при согласованной фильтрации.
Наибольшему рассогласованию принимаемого сигнала с согласованным фильтром соответствует значение δ, равное единице, наименьшему - значение, обратно пропорциональное коэффициенту сжатия согласованного фильтра (значительно меньше единицы).
При принятии решения об обнаружении цели величина рассогласования δ для дискрет по дальности, в которых произошло превышение порога обнаружения q0, сравнивается с заданным пороговым значением δ0, которое устанавливается исходя из допустимого рассогласования принимаемого сигнала, отраженного от цели, с согласованным фильтром. Если рассогласование δ не превышает порогового значения δ0 (δ≤δ0), сигнал после согласованной фильтрации считается зондирующим сигналом, отраженным от цели, в противном случае (δ>δ0) - импульсной помехой.
Изобретения иллюстрируются следующими чертежами:
Фиг.1 - наиболее близкое устройство радиолокационного обнаружения сигналов, отраженных от целей, реализующее наиболее близкий способ.
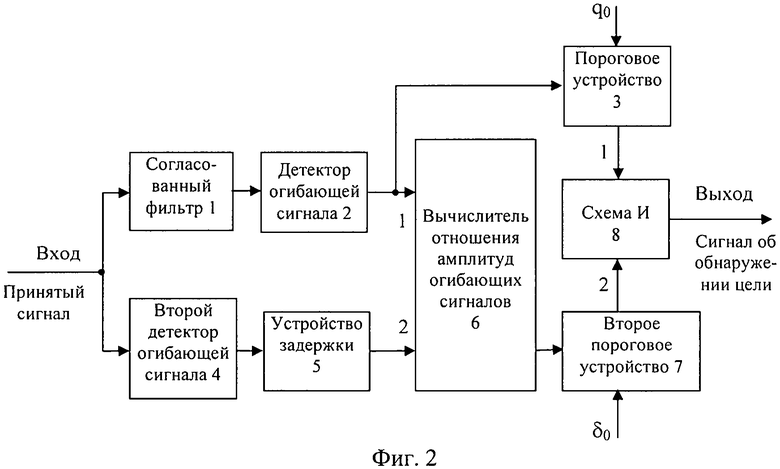
Фиг.2 - заявляемое устройство радиолокационного обнаружения сигналов, отраженных от целей, реализующее заявляемый способ.
Устройство радиолокационного обнаружения сигналов, отраженных от целей, реализующее заявляемый способ, содержит (фиг.2) последовательно соединенные согласованный фильтр 1, детектор огибающей сигнала 2 и пороговое устройство 3, второй детектор огибающей сигнала 4, устройство задержки 5, вычислитель отношения амплитуд огибающих сигналов 6, второе пороговое устройство 7 и схему «И» 8, при этом соединенные между собой вход согласованного фильтра 1 и вход второго детектора огибающей сигнала 4 являются входом устройства радиолокационного обнаружения, выход второго детектора огибающей сигнала 4 соединен со входом устройства задержки 5, первый и второй входы вычислителя отношения амплитуд огибающих сигналов 6 соединены соответственно с выходом детектора огибающей сигнала 2 и выходом устройства задержки 5, а выход его соединен со входом второго порогового устройства 7, выход порогового устройства 3 и выход второго порогового устройства 7 соединены соответственно с первым и вторым входами схемы «И» 8, выход которой является выходом устройства радиолокационного обнаружения.
Заявляемое устройство может быть выполнено с использованием следующих функциональных элементов.
Согласованный фильтр 1 - цифровой фильтр (Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации, М., «Радио связь», 1986, с.38-45).
Детектор огибающей сигнала 2 и второй детектор огибающей сигнала 4 - устройства, создающие выходные напряжения, являющиеся линейной функцией огибающей сигнала промежуточной частоты (Справочник по радиолокации, под ред. М.Сколника, т.3, М., Сов. радио, 1979, с.163).
Пороговое устройство 3 - пороговое устройство, в котором поступающий сигнал сравнивается с уровнем порога обнаружения q0, выбранным исходя из заданной вероятности ложной тревоги, при превышении которого на выходе устройства формируется сигнал (Интегральные микросхемы. Справочник под ред. Б.В.Тарабрина, М., Радио и связь, 1984).
Устройство задержки 5 - устройство временной задержки сигнала (там же). Время задержки устанавливается равным времени задержки сигнала при его обработке в согласованном фильтре 1.
Вычислитель отношения амплитуд огибающих сигналов 6 - цифровой вычислитель, осуществляющий вычисление отношения значения огибающей принимаемого сигнала до согласованной фильтрации к значению огибающей сигнала после согласованной фильтрации (1), выполнен на стандартных микросхемах (там же).
Второе пороговое устройство 7 - пороговое устройство, в котором отношение значения огибающей принимаемого сигнала до согласованной фильтрации к значению огибающей сигнала после согласованной фильтрации сравнивается с пороговым значением δ0. Если пороговое значение δ0 не превышено, на выходе устройства формируется сигнал (там же).
Схема «И» 8 - цифровой элемент, выполненный на стандартной микросхеме (там же).
Устройство радиолокационного обнаружения сигналов, отраженных от целей, работает следующим образом. Принятый сигнал подискретно по дальности поступает на вход согласованного фильтра 1, где происходит сжатие сигнала. Далее детектором огибающей сигнала 2 выделяется его огибающая, которая затем подается на вход порогового устройства 3, где сравнивается с порогом обнаружения q0. В случае превышения огибающей сжатого сигнала порога обнаружения q0 на выходе порогового устройства 3 формируется сигнал, который подается на первый вход схемы «И» 8.
Принимаемый сигнал поступает также на вход второго детектора огибающей сигнала 4, с выхода которого огибающая принимаемого сигнала подается в устройство задержки 5, где задерживается на время, равное времени задержки сигнала в согласованном фильтре 1.
С выхода детектора огибающей сигнала 2 и с выхода устройства задержки 5 сигналы, соответствующие одной и той же дискрете по дальности, подаются соответственно на первый и второй входы вычислителя отношения амплитуд огибающих сигналов 6, в котором вычисляется их отношение δ (1). С выхода вычислителя 6 сигнал, пропорциональный отношению δ, подается на вход второго порогового устройства 7, где сравнивается с пороговым значением δ0. Если величина δ не превышает указанное пороговое значение, то на выходе устройства 7 формируется сигнал, который подается на второй вход схемы «И» 8.
На выходе схемы «И» 8 формируется сигнал об обнаружении цели в дискрете по дальности, если на обоих ее входах присутствуют сигналы.
Таким образом, решение о том, что принятый сигнал является сигналом, отраженным от цели, принимается в случае, если он превысил порог обнаружения q0 и при этом величина рассогласования сигнала с согласованным фильтром δ не превышает допустимого значения δ0.
Таким образом достигается заявляемый технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ИМПУЛЬСНЫХ ПОМЕХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2494412C2 |
| СПОСОБ ОБНАРУЖЕНИЯ МАЛОРАЗМЕРНЫХ ВОЗДУШНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2777652C1 |
| Способ защиты радиолокационной станции с фазоманипулированными зондирующими сигналами от упреждающих сигналоподобных помех | 2024 |
|
RU2840720C1 |
| СПОСОБ ОБНАРУЖЕНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1990 |
|
SU1840237A1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ЦЕЛИ И УСТРОЙСТВА ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2007 |
|
RU2339969C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛА (ВАРИАНТЫ) | 2006 |
|
RU2319978C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩЕЙСЯ ЦЕЛИ С РАЗЛИЧЕНИЕМ СКОРОСТНЫХ И МАНЕВРЕННЫХ ХАРАКТЕРИСТИК | 2015 |
|
RU2619056C2 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ СИГНАЛОВ ПРИ НАЛИЧИИ ПЕРЕМЕННОГО ДОПЛЕРОВСКОГО ЭФФЕКТА | 2009 |
|
RU2467350C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2007 |
|
RU2345382C1 |
| СПОСОБ ОБНАРУЖЕНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1991 |
|
RU2236022C2 |
Изобретения относятся к области радиолокации и могут быть использованы в радиолокационных станциях (РЛС) для обнаружения целей в условиях действия импульсных помех. Достигаемым техническим результатом является увеличение защищенности РЛС от импульсных помех в виде рассогласованных сигналов большой мощности. В изобретениях после согласованной фильтрации окончательное решение о принятом сигнале, превысившем порог обнаружения, принимается после дополнительного анализа, при котором оценивается степень рассогласования принимаемого сигнала с согласованным фильтром. При этом для дискрет по дальности, в которых произошло превышение порога обнаружения, определяют отношение значения огибающей сигнала до согласованной фильтрации, задержанного на время обработки сигнала при согласованной фильтрации, к значению огибающей сигнала после согласованной фильтрации, полученное отношение сравнивают с заданным пороговым значением, установленным исходя из допустимого рассогласования принимаемого сигнала, отраженного от цели. Принимают решение об обнаружении сигнала, отраженного от цели, если указанное пороговое значение не превышено. 2 н.п. ф-лы, 2 ил.
1. Способ радиолокационного обнаружения сигналов, отраженных от целей, включающий согласованную фильтрацию принимаемого сигнала с последующим выделением огибающей сигнала и сравнением ее в каждой дискрете по дальности с порогом обнаружения, отличающийся тем, что для дискрет по дальности, в которых произошло превышение порога обнаружения, определяют отношение значения огибающей сигнала до согласованной фильтрации, задержанного на время обработки сигнала при согласованной фильтрации, к значению огибающей сигнала после согласованной фильтрации, полученное отношение сравнивают с заданным пороговым значением, установленным исходя из допустимого рассогласования принимаемого сигнала, отраженного от цели, принимают решение об обнаружении сигнала, отраженного от цели, если указанное пороговое значение не превышено.
2. Устройство радиолокационного обнаружения сигналов, отраженных от целей, содержащее последовательно соединенные согласованный фильтр, детектор огибающей сигнала и пороговое устройство, отличающееся тем, что введены второй детектор огибающей сигнала, устройство задержки, вычислитель отношения амплитуд огибающих сигналов, предназначенный для вычисления отношения значения огибающей сигнала до согласованного фильтра к значению огибающей сигнала после согласованного фильтра, второе пороговое устройство и схема И, при этом соединенные между собой вход согласованного фильтра и вход второго детектора огибающей сигнала являются входом устройства радиолокационного обнаружения, выход второго детектора огибающей сигнала соединен со входом устройства задержки, первый и второй входы вычислителя отношения амплитуд огибающих сигналов соединены соответственно с выходом детектора огибающей сигнала и выходом устройства задержки, а выход его соединен со входом второго порогового устройства, выход порогового устройства и выход второго порогового устройства соединены соответственно с первым и вторым входами схемы И, выход которой является выходом устройства радиолокационного обнаружения.
| ШИРМАН Я.Д | |||
| Теоретические основы радиолокации | |||
| - М.: Советское радио, 1970, с.110-114 | |||
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ ОТ ПАССИВНЫХ ПОМЕХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1990 |
|
RU2237906C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2007 |
|
RU2345382C1 |
| WO 2009115818 A2, 24.09.2009 | |||
| ДОЗАТОР К АГРЕГАТАМ ДЛЯ ВНЕСЕНИЯ ЖИДКИХ УДОБРЕНИЙ И ГЕРБИЦИДОВ | 1967 |
|
SU214900A1 |
| US 5347281 A, 13.09.1994 | |||
| US 7463181 B2, 09.12.2008. | |||

