Изобретение относится к области радиотехники и предназначено для слежения за фазой двухкомпонентных сигналов спутниковых навигационных систем.
Известна цифровая система фазовой автоподстройки, описанная в книге Первачев С.В. Радиоавтоматика. - М.: Радио и связь, 1982, с.19, рис.2.9 и содержащая последовательно соединенные фазовый дискриминатор, фильтр нижних частот и перестраиваемый генератор, выход которого соединен с управляющим входом фазового дискриминатора, вход фазового дискриминатора является входом цифровой системы фазовой автоподстройки, а второй выход фильтра нижних частот является выходом цифровой системы фазовой автоподстройки.
Недостатками такой цифровой системы фазовой автоподстройки являются низкая точность измерения фазы сигнала и низкая помехоустойчивость.
Наиболее близким к предлагаемому изобретению является цифровая система фазовой автоподстройки, описанная в книге ГЛОНАСС. Принципы построения и функционирования/ Под ред. А.И.Перова, В.Н.Харисова. - М.: Радиотехника, 2010, с.507, рис.13. 14 и содержащая последовательно соединенные цифровой фазовый дискриминатор, цифровой низкочастотный фильтр, управляемый цифровой генератор гармонического сигнала и фазовращатель на 90°, выход которого соединен с квадратурным управляющим входом цифрового фазового дискриминатора, выход управляемого цифрового генератора гармонического сигнала соединен с синфазным управляющим входом цифрового фазового дискриминатора, управляющий вход цифрового фазового дискриминатора является управляющим входом цифровой системы фазовой автоподстройки, второй выход цифрового низкочастотного фильтра является выходом цифровой системы фазовой автоподстройки.
Недостатком такой цифровой системы фазовой автоподстройки при приеме двухкомпонентных сигналов спутниковых навигационных систем является низкая точность измерения фазы сигнала и низкая помехоустойчивость, обусловленные тем, что обрабатываются раздельно каждая из компонент принимаемого двухкомпонентного сигнала, что ведет к энергетическим потерям.
Технической задачей изобретения является повышение точности измерения фазы сигнала и повышение помехоустойчивости.
Эта техническая задача достигается тем, что в известную цифровую систему фазовой автоподстройки частоты, содержащую цифровой фазовый дискриминатор, первый вход которого является входом цифровой системы фазовой автоподстройки, управляющий вход является управляющим входом цифровой системы фазовой автоподстройки, последовательно соединенные цифровой низкочастотный фильтр, управляемый цифровой генератор гармонического сигнала и фазовращатель на 90°, выход которого соединен с квадратурным управляющим входом цифрового фазового дискриминатора, выход управляемого цифрового генератора гармонического сигнала соединен с синфазным управляющим входом цифрового фазового дискриминатора, второй выход цифрового низкочастотного фильтра является выходом цифровой системы фазовой автоподстройки, введены последовательно соединенные первый перемножитель, второй перемножитель, накапливающий сумматор со сбросом и сумматор, второй вход которого соединен с выходом цифрового фазового дискриминатора, а его выход соединен с входом цифрового низкочастотного фильтра, первый вход первого перемножителя соединен с входом цифровой системы фазовой автоподстройки, а его второй вход соединен с выходом цифрового генератора гармонического сигнала.
Сущность изобретения поясняется чертежом, на котором представлена функциональная схема цифровой системы фазовой автоподстройки частоты.
Цифровая система фазовой автоподстройки частоты содержит последовательно соединенные цифровой фазовый дискриминатор 1, сумматор 2, цифровой низкочастотный фильтр 3, управляемый цифровой генератор гармонического сигнала 4 и фазовращатель на 90° 5, выход которого соединен с квадратурным управляющим входом цифрового фазового дискриминатора 1, последовательно соединенные первый перемножитель 6, второй перемножитель 7 и накапливающий сумматор со сбросом 8, выход которого соединен с вторым входом сумматора 2, вход фазового детектора 1 и первый вход первого перемножителя 6 соединены между собой и являются входом цифровой системы фазовой автоподстройки, управляющий вход цифрового фазового дискриминатора 1 соединен с вторым входом второго перемножителя 7 и является управляющим входом цифровой системы фазовой автоподстройки, выход управляемого цифрового генератора гармонического сигнала 4 соединен с синфазным управляющим входом цифрового фазового дискриминатора 1 и вторым входом первого перемножителя 6, второй выход цифрового низкочастотного фильтра 3 является выходом цифровой системы фазовой автоподстройки.
Цифровая система фазовой автоподстройки частоты работает следующим образом.
На вход цифрового фазового дискриминатора 1 поступает оцифрованный радиосигнал s(tk,i)=s1(tk,i)+s2(tk,i), имеющий две компоненты s1(tk,i)=Аhä(tk,i)hD(tk,i)cos(ωtk,i+φk,i) и s2(tk,i)=Ahä(tk,i)cos(ωtk,i+φk,i-π/2), сдвинутые между собой на 90°, где А, ω, φk,i - амплитуда, частота и фаза принятого сигнала, hä(tk,i) - функция расширяющей модуляции, hD(tk,i) - функция модуляции цифровыми навигационными данными, tk,i,  , k=1, 2,… - дискретные моменты времени, такие, что tk,N=tk+1,0. На выходе цифрового фазового дискриминатора 1 в моменты времени tk, формируется процесс u1(tk), среднее значение которого пропорционально ошибке слежения за фазой φ, формирующейся в результате обработки компоненты сигнала s1(tk,i). Входной радиосигнал поступает также на вход последовательно соединенных первого перемножителя 6, второго перемножителя 7 и накапливающего сумматора со сбросом 8, причем на второй вход первого перемножителя поступает процесс u4(tk,i)=cos((ω+ωó,k)tk,i) с выхода управляемого цифрового генератора гармонического сигнала 4, где ωó,k - сигнал управления по частоте, поступающий с первого выхода цифрового низкочастотного фильтра 3, а на второй вход второго перемножителя поступает процесс uó(tk,i)=hä(tk,i) с управляющего входа цифровой системы фазовой автоподстройки. На выходе накапливающего сумматора со сбросом 8 в моменты сброса tk формируется корреляционный интеграл
, k=1, 2,… - дискретные моменты времени, такие, что tk,N=tk+1,0. На выходе цифрового фазового дискриминатора 1 в моменты времени tk, формируется процесс u1(tk), среднее значение которого пропорционально ошибке слежения за фазой φ, формирующейся в результате обработки компоненты сигнала s1(tk,i). Входной радиосигнал поступает также на вход последовательно соединенных первого перемножителя 6, второго перемножителя 7 и накапливающего сумматора со сбросом 8, причем на второй вход первого перемножителя поступает процесс u4(tk,i)=cos((ω+ωó,k)tk,i) с выхода управляемого цифрового генератора гармонического сигнала 4, где ωó,k - сигнал управления по частоте, поступающий с первого выхода цифрового низкочастотного фильтра 3, а на второй вход второго перемножителя поступает процесс uó(tk,i)=hä(tk,i) с управляющего входа цифровой системы фазовой автоподстройки. На выходе накапливающего сумматора со сбросом 8 в моменты сброса tk формируется корреляционный интеграл

Среднее значение u8(tk) пропорционально ошибке слежения за фазой φ, формирующейся в результате обработки компоненты сигнала s2(tk,i).
В сумматоре 2 складываются два процесса u1(tk) и u8(tk). При этом среднее значение процесса u2(tk) на выходе сумматора 2 пропорционально ошибке слежения за фазой φ, формирующейся в результате обработки двух компонент s1(tk,i) и s2(tk,i) принятого сигнала. В результате такой обработки не происходит потерь мощности принимаемого сигнала s(tk,i).
Далее процесс u2(tk) стандартным образом сглаживается в цифровом низкочастотном фильтре 3, на первом выходе которого формируется сигнал управления по частоте ωó,k, а на его втором выходе формируется оценка фазы  .
.
Использование изобретения позволяет повысить точность измерения фазы сигнала и помехоустойчивость цифровой системы фазовой автоподстройки частоты.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОЧАСТОТНАЯ СИСТЕМА ФАЗОВОЙ АВТОПОДСТРОЙКИ | 2021 |
|
RU2760977C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2528405C1 |
| УСТРОЙСТВО СЛЕЖЕНИЯ ЗА ЗАДЕРЖКОЙ ШУМОПОДОБНЫХ ЧАСТОТНО-МАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2006 |
|
RU2313184C1 |
| СПОСОБ ПРИЕМА ШУМОПОДОБНЫХ СИГНАЛОВ С МИНИМАЛЬНОЙ ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ | 2006 |
|
RU2307474C1 |
| РАДИОЛОКАЦИОННЫЙ ДАТЧИК СКОРОСТИ СБЛИЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА С ПРЕПЯТСТВИЕМ | 2013 |
|
RU2543493C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ НЕСУЩЕЙ ЧАСТОТЫ ФАЗОМАНИПУЛИРОВАННОГО СИГНАЛА И СЛЕЖЕНИЯ ЗА НЕЙ | 2012 |
|
RU2510145C1 |
| СЛЕДЯЩИЙ ПРИЕМНИК ШИРОКОПОЛОСНОГО СИГНАЛА | 1999 |
|
RU2157052C1 |
| ДЕМОДУЛЯТОР ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2008 |
|
RU2393641C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2518428C2 |
| СПОСОБ РАННЕГО ОБНАРУЖЕНИЯ ПОЖАРА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2409865C1 |
Изобретение относится к области радиотехники и может быть использовано для слежения за фазой двухкомпонентных сигналов спутниковых навигационных систем. Достигаемый технический результат - повышение точности измерения фазы сигнала и повышение помехоустойчивости. Цифровая система фазовой автоподстройки частоты содержит цифровой фазовый дискриминатор 1, сумматор 2, цифровой низкочастотный фильтр 3, управляемый цифровой генератор гармонического сигнала 4 и фазовращатель на 90° 5, первый перемножитель 6, второй перемножитель 7 и накапливающий сумматор со сбросом 8. 1 ил.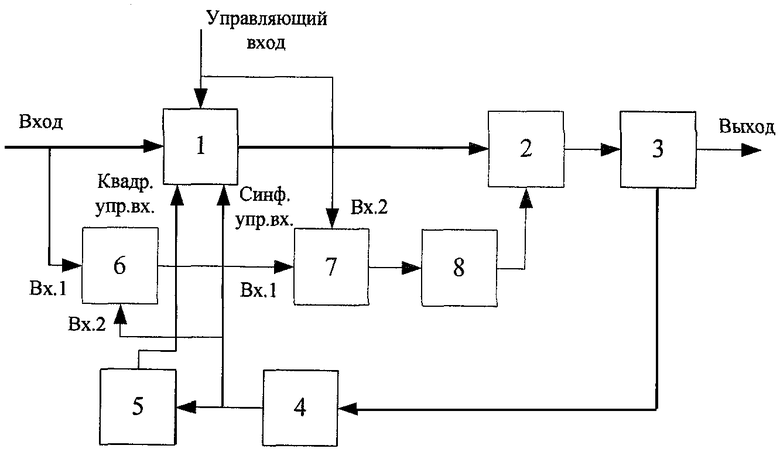
Цифровая система фазовой автоподстройки частоты, содержащая цифровой фазовый дискриминатор, первый вход которого является входом цифровой системы фазовой автоподстройки, управляющий вход является управляющим входом цифровой системы фазовой автоподстройки, последовательно соединенные цифровой низкочастотный фильтр, управляемый цифровой генератор гармонического сигнала и фазовращатель на 90°, выход которого соединен с квадратурным управляющим входом цифрового фазового дискриминатора, выход управляемого цифрового генератора гармонического сигнала соединен с синфазным управляющим входом цифрового фазового дискриминатора, второй выход цифрового низкочастотного фильтра является выходом цифровой системы фазовой автоподстройки, отличающаяся тем, что в нее введены последовательно соединенные первый перемножитель, второй перемножитель, накапливающий сумматор со сбросом и сумматор, второй вход которого соединен с выходом цифрового фазового дискриминатора, а его выход соединен с входом цифрового низкочастотного фильтра, первый вход первого перемножителя соединен с входом цифровой системы фазовой автоподстройки, а его второй вход соединен с выходом цифрового генератора гармонического сигнала.
| СПОСОБ АВТОПОДСТРОЙКИ ЧАСТОТЫ ОПОРНОГО СИГНАЛА ПРИЕМНОЙ СТАНЦИИ, СПОСОБ ОЦЕНИВАНИЯ РАССТРОЙКИ ЧАСТОТЫ СИГНАЛОВ ЛУЧЕЙ ОТНОСИТЕЛЬНО ЧАСТОТЫ ОПОРНОГО СИГНАЛА, УСТРОЙСТВО АВТОПОДСТРОЙКИ ЧАСТОТЫ ОПОРНОГО СИГНАЛА ПРИЕМНОЙ СТАНЦИИ | 2005 |
|
RU2286015C1 |
| СПОСОБ АВТОПОДСТРОЙКИ ЧАСТОТЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 1999 |
|
RU2168267C2 |
| СПОСОБ И СХЕМА УПРАВЛЕНИЯ СИСТЕМОЙ ФАЗОВОЙ АВТОПОДСТРОЙКИ ЧАСТОТЫ С ЦИФРОВОЙ ОБРАБОТКОЙ ДЛЯ СЕТЕВОЙ СИНХРОНИЗАЦИИ | 1995 |
|
RU2154895C2 |
| SU 5539357 A, 23.07.1996 | |||
| US 5661440 A, 26.08.1997. | |||

