Изобретение относится к спутниковым технологиям определения местоположения и обработке радионавигационных сигналов.
Известна цифровая система фазовой автоподстройки частоты, представленная в RU 2431917 С1. Опубликовано 20.10.2011 г. и содержащая последовательно соединенные цифровой фазовый дискриминатор, сумматор, цифровой низкочастотный фильтр, управляемый цифровой генератор гармонического сигнала и фазовращатель на 90°, выход которого соединен с квадратурным управляющим входом цифрового фазового дискриминатора, последовательно соединенные первый перемножитель, второй перемножитель и накапливающий сумматор со сбросом, выход которого соединен с вторым входом сумматора, вход фазового детектора и первый вход первого перемножителя соединены между собой и являются входом цифровой системы фазовой автоподстройки, управляющий вход цифрового фазового дискриминатора соединен с вторым входом второго перемножителя и является управляющим входом цифровой системы фазовой автоподстройки, выход управляемого цифрового генератора гармонического сигнала соединен с синфазным управляющим входом цифрового фазового дискриминатора и вторым входом первого перемножителя, второй выход цифрового низкочастотного фильтра является выходом цифровой системы фазовой автоподстройки.
Недостатком известной цифровой системы фазовой автоподстройки частоты (ФАПЧ), является низкая точность измерения фазы сигнала и низкая помехоустойчивость, обусловленные тем, что обрабатываются только принимаемые двухкомпонентные сигналы, излучаемые другими навигационным космическим аппаратом (НКА), как на одной несущей частоте, так и на разных несущих частотах и обрабатываются при этом в аналогичных и независимых системах ФАПЧ. Это обуславливает неучет общей динамики фаз сигналов на одной частоте и разных НКА, что ведет к энергетическим потерям.
Наиболее близким, принятым за прототип, является цифровая система фазовой автоподстройки, описанная в книге ГЛОНАСС. Принципы построения и функционирования / под ред. А.И. Перова, В.Н. Харисова. - М.: Радиотехника, 2010, с. 507, рис. 13, рис. 14 и содержащая последовательно соединенные цифровой фазовый дискриминатор, цифровой низкочастотный фильтр, управляемый цифровой генератор гармонического сигнала и фазовращатель на 90°, выход которого соединен с квадратурным управляющим входом цифрового фазового дискриминатора, выход управляемого цифрового генератора гармонического сигнала соединен с синфазным управляющим входом цифрового фазового дискриминатора, управляющий вход цифрового фазового дискриминатора является управляющим входом цифровой системы фазовой автоподстройки, а второй выход цифрового низкочастотного фильтра является выходом цифровой системы фазовой автоподстройки.
Недостатком такой цифровой системы фазовой автоподстройки, взятой за прототип, является низкая точность измерения фазы сигнала и низкая помехоустойчивость, обусловленные тем, что обрабатываются раздельно каждая из компонент принимаемых сигналов при этом не учитывается общая динамика фаз за счет движения потребителя и нестабильности опорного генератора приемника, что ведет к энергетическим потерям.
Техническим результатом изобретения является повышение помехоустойчивости системы слежения за фазами сигналов, излучаемых одним НКА спутниковых навигационных систем, как на одной, так и на разных несущих частотах, повышение точности измерения фаз сигналов принимаемых сигналов и повышение энергетики в контуре слежения за фазами сигналов.
Указанный технический результат достигается тем, что в известную цифровую систему фазовой автоподстройки частоты, содержащую последовательно соединенные цифровой фазовый дискриминатор, цифровой низкочастотный фильтр, управляемый цифровой генератор гармонического сигнала и фазовращатель на 90°, выход которого соединен с квадратурным управляющим входом цифрового фазового дискриминатора, выход управляемого цифрового генератора гармонического сигнала соединен с синфазным управляющим входом цифрового фазового дискриминатора, образующие индивидуальный контур слежения, при чем управляющий вход цифрового фазового дискриминатора является управляющим входом цифровой системы фазовой автоподстройки, второй выход цифрового фильтра является выходом индивидуального контура, введены m индивидуальных контуров слежения за фазами принимаемых сигналов, где m=1…i, блок расчета коэффициентов α, β и γ для фильтров, общий контур слежения за базовой частотой, содержащий векторный перемножитель и последовательно соединенный фильтр γ и параллельно ему фильтр α, входом векторного перемножителя являются выходы дискриминаторов индивидуальных контуров, первый выход общего контура является вторым управляющим входом индивидуальных контуров, второй выход общего контура является третьим управляющим входом индивидуальных контуров, при этом фильтр γ выполнен с возможностью определения базовой частоты, для получения вектора оценок фаз принимаемых сигналов  и вектора оценок частот принимаемых сигналов
и вектора оценок частот принимаемых сигналов 



где
K=(K1 K Km)T - вектор коэффициентов отношений i-той частоты к базовой частоте 
α, β и γ - коэффициенты следящего фильтра,
h - интервал интегрирования,
dt=(d1,t, …, dm,t)T - вектор выходов дискриминаторов, значения которых описываются выражением
где
ξi - сигнал НКА на i-м входе дискриминатора,
 - экстраполированное значение фазы i-го сигнала на шаг h, векторное произведение KTd - взвешенная сумма выходов дискриминаторов, Im { } - определение мнимой части.
- экстраполированное значение фазы i-го сигнала на шаг h, векторное произведение KTd - взвешенная сумма выходов дискриминаторов, Im { } - определение мнимой части.
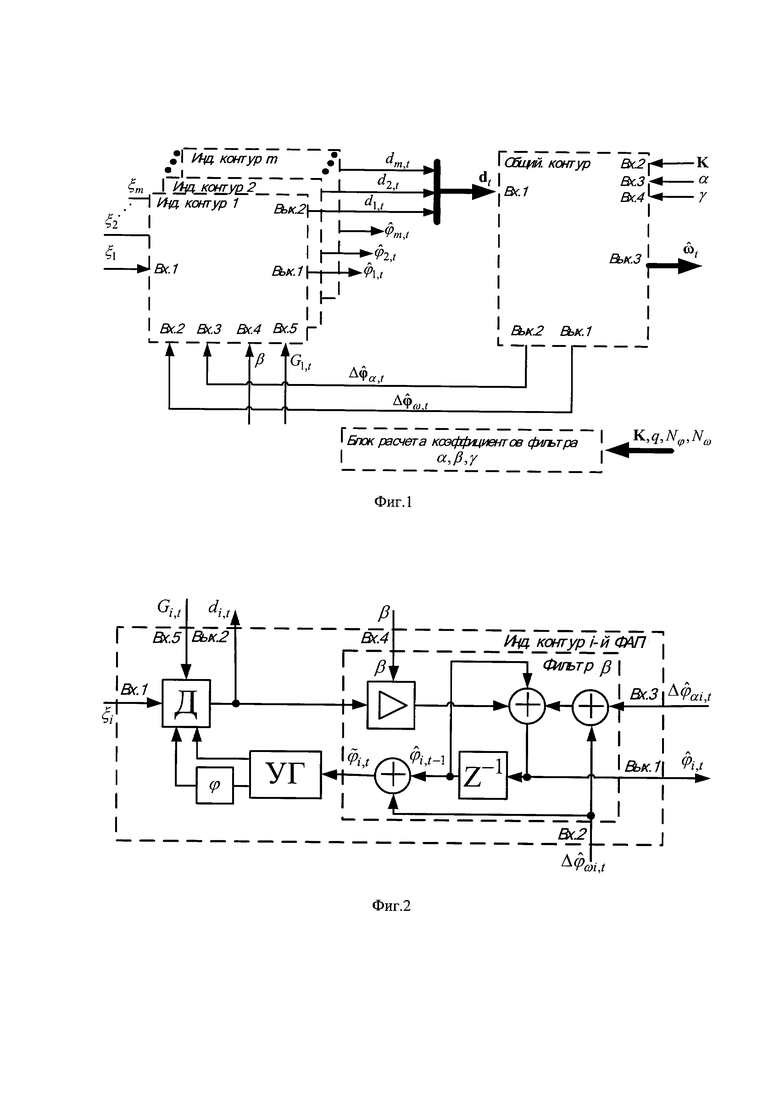
Сущность предлагаемой многочастотной системы фазовой автоподстройки (МЧФАП) поясняется структурными схемами, представленными на фигурах. Указанные фигуры не охватывают и тем более не ограничивают весь объем притязаний данного решения, а являются лишь иллюстрирующим материалом для частного случая исполнения, где на фиг. 1 представлена структурная схема МЧФАП; фиг. 2 - схема индивидуального контура; фиг. 3 - схема общего контура.
МЧФАП (фиг. 1) содержит m индивидуальных контуров слежения за фазами сигналов (соответствует числу принимаемых сигналов), общий контур слежения за базовой частотой и блок расчета коэффициентов фильтров. На вход МЧФАП, которыми являются входы 1 каждого из индивидуальных контуров, поступает совокупность оцифрованных отсчетов АЦП ξi,t, на разные дискриминаторы, имеющие разные опорные сигналы, разных частот, диапазонов, где i=1…m.
В общем контуре формируются приращения по фазам сигналов  и
и  связанные с оценкой базовой частоты.
связанные с оценкой базовой частоты.
В каждом индивидуальном контуре формируются оценки фаз принимаемых сигналов НКА  на основе приращений по фазам
на основе приращений по фазам  и
и  а также определяются экстраполированные значения фаз
а также определяются экстраполированные значения фаз  используемые для управления генераторами сигналов в индивидуальных контурах.
используемые для управления генераторами сигналов в индивидуальных контурах.
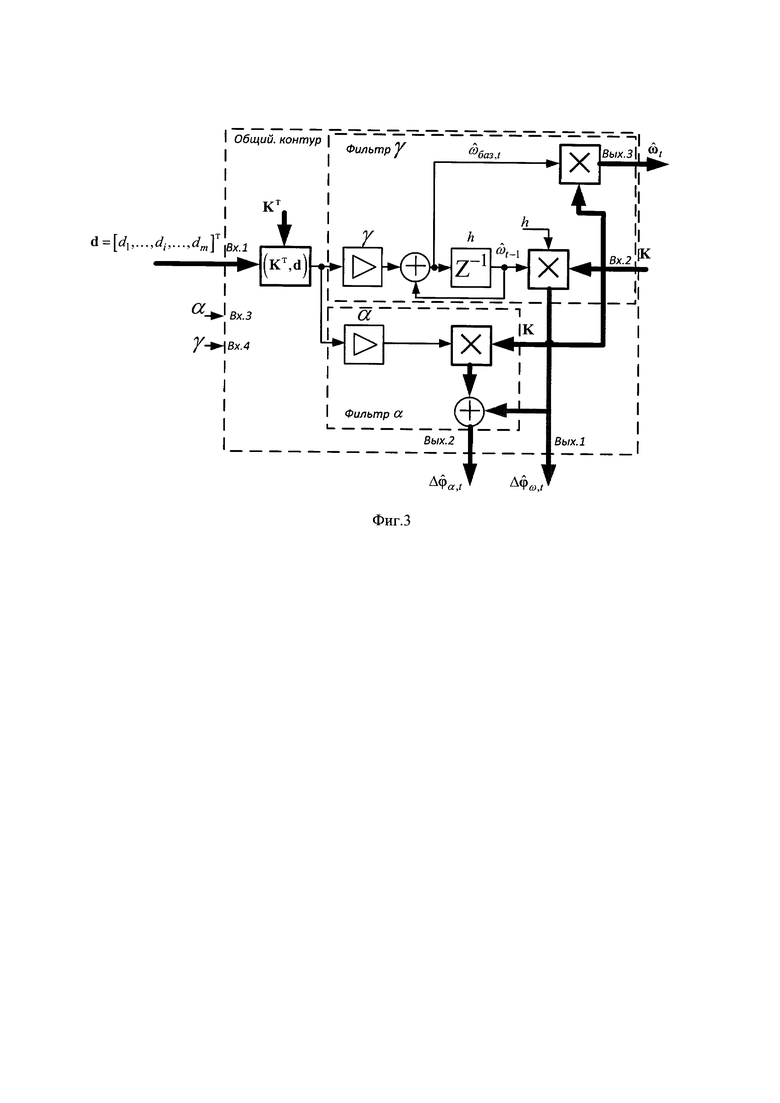
Каждый индивидуальный контур i-й ФАП (фиг. 2) содержит последовательно соединенные цифровой фазовый дискриминатор Д, цифровой фильтр β, управляемый цифровой генератор УГ гармонического сигнала, выход которого соединен с синфазным управляющим входом цифрового фазового дискриминатора Д.
На выходе 2 каждого индивидуального контура формируются процесс di,t, пропорциональный величине рассогласования по фазе несущей входного и опорного сигналов, которые поступают на вход 1 общего контура. На вход 5 каждого индивидуального контура поступает Gi,t - значение символа модулирующей последовательности в момент времени t.
На выходе 1 каждого индивидуального контура формируется оценка фазы  соответствующая i-му частотному диапазону или компоненте принимаемого сигнала.
соответствующая i-му частотному диапазону или компоненте принимаемого сигнала.
Общий контур слежения (фиг. 3), содержащий векторный перемножитель (процесс KTd), последовательно соединенный фильтр γ и параллельно ему фильтр α, при этом фильтр γ выполнен с возможностью определения базовой частоты для расчета приращения фаз для индивидуальных контуров.
Значения процессов di,t с выхода 2 каждого из индивидуальных контуров поступает на вход 1 общего контура, на векторный перемножитель, на выходе которого формируется процесс KTd, который поступает на фильтр γ и фильтр α. На выходе фильтра γ формируются оценки вектора частот  и вектор приращений фаз
и вектор приращений фаз  пропорциональные базовой частоте, которые поступают на входы 2 соответствующих индивидуальных контуров. На выходе фильтра α формируются приращения фаз
пропорциональные базовой частоте, которые поступают на входы 2 соответствующих индивидуальных контуров. На выходе фильтра α формируются приращения фаз  пропорциональные взвешенной сумме KTd выходов дискриминаторов и значениям частот принимаемых сигналов, которые поступают на входы 3 соответствующих индивидуальных контуров.
пропорциональные взвешенной сумме KTd выходов дискриминаторов и значениям частот принимаемых сигналов, которые поступают на входы 3 соответствующих индивидуальных контуров.
Определение вектора оценок фаз принимаемых сигналов  и вектора оценок частот принимаемых сигналов
и вектора оценок частот принимаемых сигналов  (размерность вектора фаз
(размерность вектора фаз  и вектора частот
и вектора частот  соответствуют количеству сигналов m принимаемых от одного НКА), которые можно определить из системы выражений:
соответствуют количеству сигналов m принимаемых от одного НКА), которые можно определить из системы выражений:


где K=(K1 K Km)Т - вектор коэффициентов отношений i-той частоты к базовой частоте  (за базовую частоту может быть принята любая из принимаемых частот), α, β и γ - коэффициенты следящего фильтра, h - интервал интегрирования, dt=(d1,t, …, dm,t)T - вектор выходов дискриминаторов, значения которых описываются выражением
(за базовую частоту может быть принята любая из принимаемых частот), α, β и γ - коэффициенты следящего фильтра, h - интервал интегрирования, dt=(d1,t, …, dm,t)T - вектор выходов дискриминаторов, значения которых описываются выражением
ξi - сигнал НКА на i-м входе дискриминатора,
 - экстраполированное значение фазы i -го сигнала на шаг h, векторное произведение KTd - взвешенная сумма выходов дискриминаторов, Im { } - определение мнимой части.
- экстраполированное значение фазы i -го сигнала на шаг h, векторное произведение KTd - взвешенная сумма выходов дискриминаторов, Im { } - определение мнимой части.
В блоке расчета коэффициентов фильтра α, β и γ осуществляется расчет коэффициентов α, β и γ итерационным методом. Порядок расчета разбит на 4 этапа:
Этап 1. Задать исходные данные:
q - значение отношения сигнал-шум в отсчете коррелятора;
Nϕ - спектральная плотность формирующего шума фазы;
Nω - спектральная плотность формирующего шума базовой частоты.
Этап 2. Определить значения корреляционной матрицы  решая систему уравнений:
решая систему уравнений:

где 
Этап 3. Определение коэффициента усиления  решая систему уравнений с начальными условиями
решая систему уравнений с начальными условиями 

Этап 4. Определение коэффициентов α, β и γ по вычисленным значениям коэффициентов  используя выражения
используя выражения
Использование изобретения позволяет повысить точность измерения фаз сигналов и помехоустойчивость системы фазовой автоподстройки в целом, как при приеме сигналов на разных квадратурах сигнала одной несущей, так и на разных несущих частотах одного НКА, осуществляется оптимальное оценивание фаз всех принимаемых сигналов, за счет взвешенного суммирования выходов дискриминаторов пропорционально отношению несущих частот принимаемых сигналов к базовой частоте.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОСИГНАЛЬНАЯ СИСТЕМА ФАЗОВОЙ АВТОПОДСТРОЙКИ | 2021 |
|
RU2794168C1 |
| ЦИФРОВАЯ СИСТЕМА ФАЗОВОЙ АВТОПОДСТРОЙКИ ЧАСТОТЫ | 2010 |
|
RU2431917C1 |
| СПОСОБ ВЫДЕЛЕНИЯ НЕСУЩЕЙ ИЗ СИГНАЛА С УГЛОВОЙ МОДУЛЯЦИЕЙ | 1992 |
|
RU2099894C1 |
| СЛЕДЯЩИЙ ПРИЕМНИК ШИРОКОПОЛОСНОГО СИГНАЛА | 1999 |
|
RU2157052C1 |
| СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537818C1 |
| Устройство восстановления несущей | 2024 |
|
RU2831382C1 |
| Устройство демодуляции кодоимпульсных сигналов с фазовой манипуляцией | 1974 |
|
SU547973A1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ НЕСТАБИЛЬНОСТИ НЕСУЩЕЙ ЧАСТОТЫ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2006 |
|
RU2336650C2 |
| КВАЗИОПТИМАЛЬНЫЙ ПРИЕМНИК ДИСКРЕТНО-НЕПРЕРЫВНЫХ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2005 |
|
RU2300173C1 |
| Устройство синхронизации псевдошумовых сигналов | 1977 |
|
SU680190A1 |
Изобретение относится к спутниковым технологиям определения местоположения и обработке радионавигационных сигналов. Техническим результатом изобретения является повышение помехоустойчивости системы слежения за фазами сигналов, излучаемых одним навигационным космическим аппаратом (НКА) спутниковых навигационных систем, как на одной, так и на разных несущих частотах, повышение точности измерения фаз сигналов принимаемых сигналов и повышение энергетики в контуре слежения за фазами сигналов. Для этого в цифровую систему фазовой автоподстройки частоты, образующую индивидуальный контур слежения, введены m индивидуальных контуров слежения за фазами принимаемых сигналов, где m=1…i, общий контур слежения за базовой частотой, содержащий векторный перемножитель, фильтры γ и α, при этом фильтр γ выполнен с возможностью определения базовой частоты, для получения вектора оценок фаз  принимаемых сигналов и вектора оценок частот
принимаемых сигналов и вектора оценок частот  принимаемых сигналов, блок расчета коэффициентов α, β и γ для фильтров. 3 ил.
принимаемых сигналов, блок расчета коэффициентов α, β и γ для фильтров. 3 ил.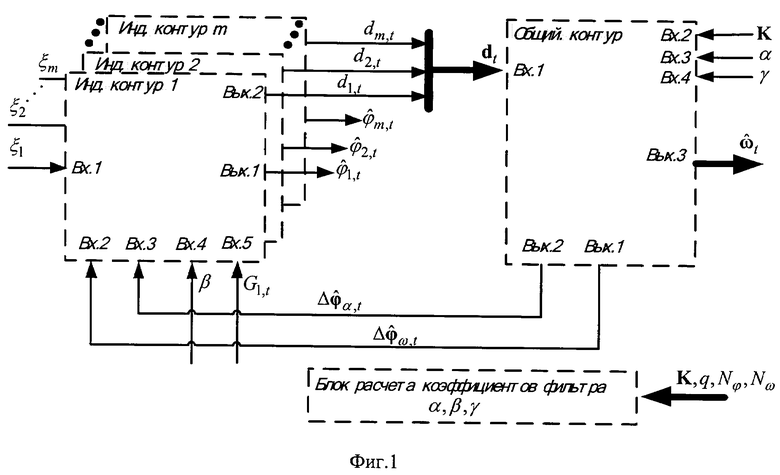
Многочастотная система фазовой автоподстройки, содержащая последовательно соединенные цифровой фазовый дискриминатор, цифровой низкочастотный фильтр, управляемый цифровой генератор гармонического сигнала и фазовращатель на 90°, образующие индивидуальный контур слежения за фазой, выход управляемого цифрового генератора гармонического сигнала соединен с синфазным управляющим входом цифрового фазового дискриминатора, причем управляющий вход цифрового фазового дискриминатора является управляющим входом индивидуального контура, а выход цифрового фильтра – выходом индивидуального контура, отличающаяся тем, что введены m индивидуальных контуров слежения за фазами принимаемых сигналов, где m=1…i, блок расчета коэффициентов α, β и γ для фильтров, общий контур слежения за базовой частотой, содержащий векторный перемножитель и последовательно соединенный фильтр γ, и параллельно ему фильтр α, входом векторного перемножителя являются выходы дискриминаторов индивидуальных контуров, первый выход общего контура является вторым управляющим входом индивидуальных контуров, второй выход общего контура является третьим управляющим входом индивидуальных контуров, при этом фильтр γ выполнен с возможностью определения базовой частоты, для получения вектора оценок фаз  принимаемых сигналов и вектора оценок частот
принимаемых сигналов и вектора оценок частот  принимаемых сигналов
принимаемых сигналов


где K=(K1 K Km)T – вектор коэффициентов отношений i-той частоты к базовой частоте 
α, β и γ – коэффициенты следящего фильтра;
h – интервал интегрирования;
dt=(d1,t, …,dm,t)T – вектор выходов дискриминаторов, значения которых описываются выражением
где ξi – сигнал НКА на i-м входе дискриминатора;
 – экстраполированное значение фазы i-го сигнала на шаг h;
– экстраполированное значение фазы i-го сигнала на шаг h;
векторное произведение KTd – взвешенная сумма выходов дискриминаторов;
Im { } – определение мнимой части.
| ЦИФРОВАЯ СИСТЕМА ФАЗОВОЙ АВТОПОДСТРОЙКИ ЧАСТОТЫ | 2010 |
|
RU2431917C1 |
| КРАН ПОРТАЛЬНОГО ТИПА | 0 |
|
SU193699A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОРРЕКЦИИ ОТКЛОНЕНИЯ ФАЗЫ НЕСУЩЕЙ В ХОДЕ ПРИЕМА РАДИОНАВИГАЦИОННОГО СИГНАЛА | 2012 |
|
RU2584139C2 |
| ЦИФРОВАЯ СИСТЕМА ФАЗОВОЙ АВТОПОДСТРОЙКИ ЧАСТОТЫ (ВАРИАНТЫ) | 2008 |
|
RU2383991C2 |
| АДАПТИВНОЕ МНОГОФУНКЦИОНАЛЬНОЕ КОРРЕЛЯЦИОННО-ФИЛЬТРОВОЕ УСТРОЙСТВО | 2007 |
|
RU2353050C1 |
| US 10031236 B2, 24.07.2018 | |||
| 1972 |
|
SU414488A1 | |
| KR 20110053603 A, 24.05.2011. | |||

