Предлагаемое изобретение относится к области судовождения - автоматическому управлению движением судна по заданному направлению с использованием регуляторов оборотов гребных винтов.
Известен способ автоматического управления движением судна по заданному курсу, реализованный в «Системе автоматического управления движением судна» (патент России № 2248914, БИ № 9, март 05 г.). Способ управления движением судна основан на использовании информации о фазовом состоянии судна для управления только рулевым приводом судна.
Известен также способ автоматического управления движением судна (патент России № 2292289, БИ № 3, 27.01.07, принятый нами в качестве прототипа), в котором используют рулевой привод, сумматор, датчики: курса, угловой скорости судна, перекладки руля, с которых сигнал угловой скорости судна, сигнал угла перекладки руля и сигнал угла курса вводят на вход сумматора. Сигнал, сформированный на выходе сумматора, подают на вход рулевого привода:
δзд=К1Δφ+К2ω-К3δ (1)
где Δφ=φ-φзд - сигнал рассогласования по курсу,
φ, φзд - сигналы текущего и заданного курса,
δ, δзд - сигналы текущего и заданного значения угла перекладки руля,
ω - сигнал угловой скорости судна.
Недостатками рассмотренных способов автоматического управления движением судна являются:
- появляющееся от воздействий внешних возмущений среднее отклонение курса судна от заданного направления движения,
- смещение балансировочного значения угла руля от нулевого положения при наличии неодинаковой тяги гребных винтов судна и возмущающего момента от волнения и ветра, действующего на судно,
- появление угла дрейфа судна из-за отклонения руля на балансировочное значение, отличное от нуля.
Целью предлагаемого способа является компенсация возмущающего момента, действующего на судно, путем введения корректировки тяги гребных винтов.
Рассмотрим как устраняются отмеченные выше недостатки в предлагаемом способе управления.
Предлагаемое изобретение базируется на использовании известного способа автоматического управления движением судна с управлением кормовым рулем, в котором дополнительно формируют сигнал для корректировки оборотов левого и правого гребных винтов судна. Управляющий момент, создаваемый раздраем оборотов левого и правого гребных винтов, компенсирует возмущающий момент. При этом отмеченных три недостатка ликвидируются.
В способе управления движением судна алгебраически суммируют сигналы с задатчика и датчика курса для формирования сигнала рассогласования по углу курса Δφ. Сигналы: рассогласования по углу курса, угловой скорости (с датчика угловой скорости) и угла перекладки руля (с датчика угла руля) вводят на вход сумматора для формирования сигнала управления, который затем подают на вход рулевого привода в соответствии с зависимостью (1). Дополнительно используют блок коммутации, блок управления, два корректора оборотов двух гребных винтов. Сигнал угла перекладки руля с датчика угла руля вводят в блок управления, где формируется сигнал среднего значения угла перекладки руля δср, который используют для формирования сигналов коррекции оборотов левого и правого гребных винтов в соответствии с зависимостью:
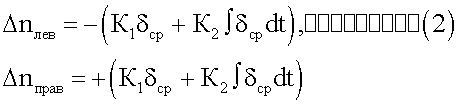
где
δср - среднее значение угла перекладки руля,
К1>100 K2 - постоянные коэффициенты.
Сигналы коррекции оборотов левого и правого гребных винтов Δnлев, Δnправ вводят соответственно в корректоры оборотов левого и правого гребных винтов.
Сигнал заданного значения угла курса φзд из блока задатчика курса вводят в блок коммутации для формирования сигнала отключения коррекции Δnлев=0, Δnправ=0 при выполнении условия:
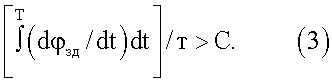
Сигнал отключения коррекции из блока коммутации вводят в блок управления для перевода Δnлев, Δnправ в нулевое состояние.
Для иллюстрации работы предложенного способа рассмотрим устройство автоматического управления движением судна с коррекцией тяги.
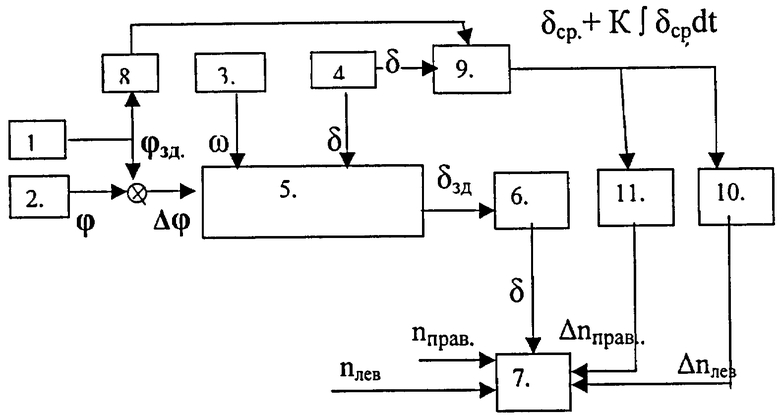
На чертеже приведена блок-схема, содержащая: задатчик курса - 1, датчик курса - 2, датчик угловой скорости - 3, датчик угла руля - 4, сумматор - 5, рулевой привод - 6, судно - 7, блок коммутации - 8, блок управления - 9, корректоры оборотов левого и правого гребных винтов - 10, 11.
Устройство может быть реализовано на типовых датчиках угла: 1, 2, 4 с точностью преобразования не хуже 2.5%; сумматор - 5 и блок управления - 9 - на усилительных микросхемах типа 140 УД 8; датчик угловой скорости - 3 с чувствительностью не ниже 0.05 гр./с; блок коммутации - 8 - электромагнитное реле; корректоры оборотов - 10, 11 - суммирующие устройства в штатных регуляторах оборотов левого и правого гребных винтов; рулевой привод - 6 - штатный судовой.
Рассмотрим работу устройства автоматического управления движением судна с коррекцией тяги.
Судно движется по курсу, равному заданному значению курса φзд, который формируется задатчиком курса - 1. При отклонении судна от заданного курса осуществляется автоматическое возвращение на прежний курс, т.к. на вход сумматора - 5 поступит сигнал рассогласования по курсу:

где φ - текущий курс судна, с датчика курса - 2.
На выходе сумматора - 5 формируется сигнал управления рулевым приводом - 6 (см. (1)):
δзд=К1Δφ+К2ω-К3δ.
Сигнал δзд с выхода сумматора - 5 поступает на вход рулевого привода, руль корабля δ отклоняется на угол δзд и судно возвращается на прежний курс.
В процессе плавания в блоке управления - 9 формируется сигнал среднего значения угла перекладки руля по сигналу текущего значения угла перекладки руля δ от датчика угла руля - 4; на выходе блока - 9 формируется сигнал коррекции оборотов левого и правого гребных винтов в соответствии с зависимостью (2), который поступает на входы корректоров оборотов:
правого гребного винта со знаком «+»,
левого гребного винта со знаком «-»
Δnлев=-(K1δср+К2∫δcpdt),
Δnправ=+(K1δср+К2∫δcpdt).
Это приведет при δср>0 к уменьшению оборотов левого кормового винта и увеличению оборотов правого кормового винта. (Балансировочное значение угла перекладки руля приблизится к нулевому значению, т к. суммарный момент, действующий на судно, будет около нуля.)
При изменении направления движения судна по сигналу φзд из задатчика курса (1) в блоке коммутации (8) формируется условие (3). При выполнении условия (3) сигнал отключения коррекции из блока (8) поступает в блок управления (9) для отключения коррекции Δnлев=0, Δnправ=0.
Проведенное моделирование подтвердило эффективность использования предложенного способа управления движением судна.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ШИРОТЕ И ДОЛГОТЕ | 2012 |
|
RU2516885C2 |
| УСТРОЙСТВО И СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО РАСПИСАНИЮ | 2013 |
|
RU2525606C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ЗАДАННОЙ ТРАЕКТОРИИ | 2011 |
|
RU2483973C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| СПОСОБ ОТКАЗОБЕЗОПАСНОГО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2010 |
|
RU2432297C1 |
| АППАРАТУРА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ ПРИ ВОЛНЕНИИ | 2009 |
|
RU2392181C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВОЗМУЩЕНИЙ | 2012 |
|
RU2492105C1 |
| АППАРАТУРА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ С БЛОКОМ ДИАГНОСТИКИ | 2009 |
|
RU2420424C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С УЧЕТОМ ВОЛНЕНИЯ | 2011 |
|
RU2499727C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ С ДИАГНОЗОМ СБОЕВ | 2009 |
|
RU2394721C1 |
Изобретение относится к области судовождения. Автоматическое управление движением судна обычно осуществляется с помощью кормового руля достаточно эффективно, но при наличии нескольких гребных винтов, а также при волнении моря или ветре качество управления падает. Предложенный способ позволяет повысить качество автоматического управления движением судна благодаря компенсации внешних возмущающих моментов, возникающих от морского волнения, ветра или неравномерной тяги гребных винтов. Компенсация возмущающих моментов осуществляется с помощью раздрая оборотов левого и правого гребных винтов судна. Величина возмущающего момента определяется по величине среднего значения угла перекладки руля. 1 ил.
Способ управления движением судна, при котором используют сигналы задатчика курса, датчика курса, датчика угловой скорости и датчика угла руля для формирования сигнала, управляющего рулевым приводом, отличающийся тем, что, используя сигнал с датчика угла руля, формируют в блоке управления сигнал среднего значения угла руля и сигнал интеграла по времени от среднего значения угла руля, которые вводят в корректоры оборотов правого и левого гребных винтов, а в случае изменения курса судна сигнал задатчика курса вводят в блок коммутации, в котором формируют подаваемый в блок управления сигнал обнуления сигнала среднего значения угла руля и сигнала интеграла по времени от среднего значения угла руля.
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2292289C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ | 2004 |
|
RU2248914C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2240953C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2133491C1 |

