I
Изобретение относится к измерительной технике и предназначено для измере шя ускорений.
Известен компенсационный акселерометр , содержащий электростатический обратный преобразователь, состоящий из неподвижных электродов, между которыми расположен подвижный чувствительный элемент, датчик положения чувствительного элемента, выход которого через диффереш1иаль ш1Й усилитель подключен к соответствующим электродам обрат1юго преобразователя fl.
В этом акселерометре в завис шюсти от направле1шя внешнего возмущения работает один из электростатических электродов.
Статическая характеристика обратного преобразователя определяется формулой
с-л, и
F--kgTV
где к - коэффициент пропорцнональмэсти;
-разность потенш1алов между эл ектро д ами;
-величина зазора между электродами.
Недостатком такого акселерометра является иелиней1юсть его характеристики, определяемая нелинейностью статической характеристшо обратного преобразователя.
Наиболее близким по технической сущности к предлагаемому является компенсашюшгый акселерометр, содержащий ПОДВИЖШ11Й чувствительный элемент, устаиовлетгные с противоположных сторон от него электростатические электроды, датчш-х положеш1я чувствительного элемента, подключе111Ш1Й к входу усишггеля, cjb aiaтор н блок вьгчиташ я, первые входы которых подключены к источнику опорного , Bixjpbie,входы - к выходу усил5 теля, а выходы -к электростатическим электродам, и индикатор, подключенный к выходу усилителя 23.
Вьфажение для сильь воздействующей на подвижный чупствит(;шьиый элемент,
вид г() ()г
кмеет
i((4
коэффиниоят прюпорциональК где
1юсти;
и. величина опорного напряжения;приращение величины нали
пряжетшя на электродах;
4 заэор между электуюдами и подвижным чувствительным элементом при его центральном положении; Д(5 - изменение величины зазор при перемецении чувствительного элемента,
Следовательно, сила электростатического обратного преобразователя нелинейно зависит от ВХОД1ЮГО напряжения из-за изменения величины зазора, и статическая характеристика всего акселерометра нелинейна.
Цель изобретения - повытение точности за счет линеаризации статической характеристики акселерометра.
Указанная цель достигается тем, что в компенсационный акселерометр дополнителыю введены последовательно соединенные Корректирующий акселерометр, масштабное звено и второй cyKtviaTOp, другой вход которого подключен к выход усилителя, а выход - ко вторым входам первого сумматора и блока вычитания,
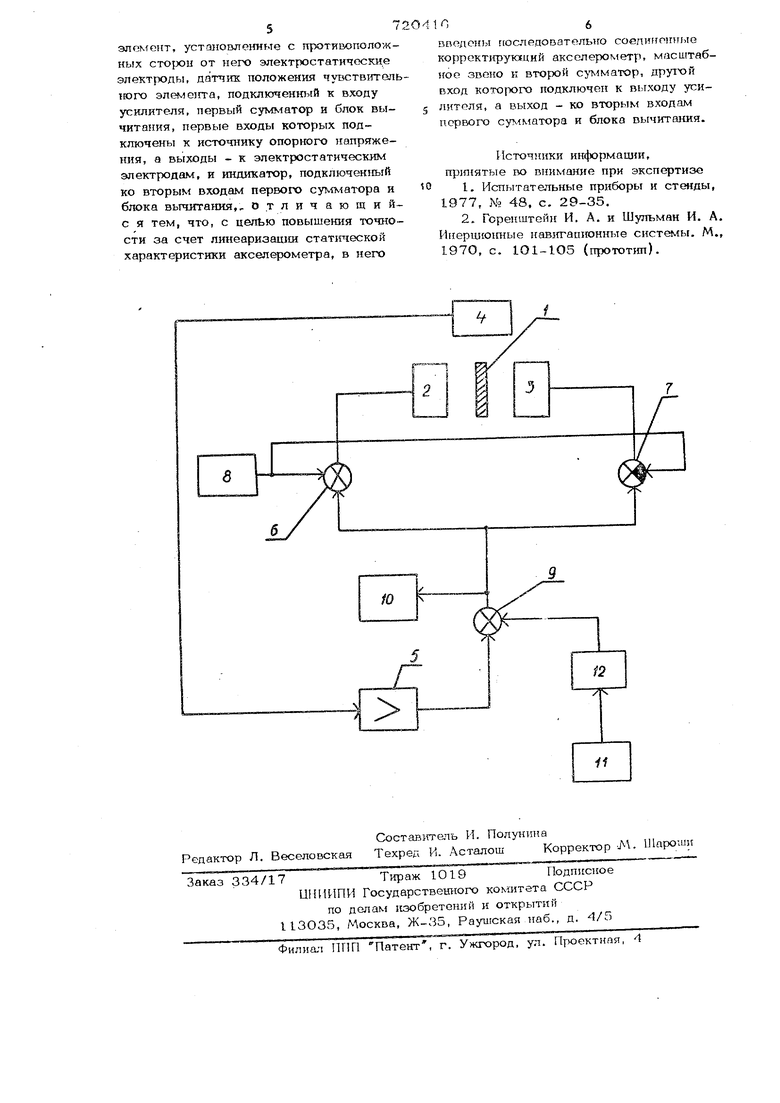
На чертеже приведена функциональная схема компенсационного акселе эометра.
Компенсационный акселерометр содержит-подвижный чувствительный элемент установленные с противоположшэтх от нег сторон электростатические электроды 2,3 составляющие обратный преобразователь, датчик 4 положения чувствительного элемента, подключенный к входу усилителя 5 первый сумматор 6 и блок 7 вычитания, первые входы которых подключень к источнику 8 опорного напряжения, вторые входы - к выходу второго суммаггора 9, а выходы - соответственно, к гшектростатическик электродам 2 и 3.
Индикатор 1О подключен к выходу второго сумматора 9, к первому входу которого подключен выход усилителя 5, . а ко второму входу - последовательно соединенные коррект1фую Щ1й акселерометр 11 и масштабгюе звено 12,
Компенсашгонный акселерометр работает следующим образомПри отсутствии ускорения 1юдвижш11й чувствительный элпмент 1 находится в центральном положе ош. При этом сипьзл с датч}гка 4 положения чувствительнох л элемента, сигнал с коррект1фуюшего акселерометра 11 и, соответственно, сигнал на выходе второго сук матора 9 равны нулю.
Напряжение на электростатических электродах 2, 3 равны напряжению, поступающему с источ1шка 8 опорного напряжения. При этом силы, воздействующие на подвижный чувствительный элемент 1 со сторогаз электростатических электродов 2, 3, равны и противоположны.
При воздействии внеишего ускорения, например в направлении электростатического электрода 3, с выхода корректирующего акселерометра 11 через масштабное звено 12, второй сумматор 9, первый cy Iмaтop 6, блок вычитания 7, на электростатические электроды поступает сигнал, при котором сила электростатического электрода 2 увеличивается, а сила, coздaвaeIvIaя электростатическим элект юдом 3, уменьшается.
Коэффициент переда ш масштабного звена 12 выбран таким образом, что результирующая всех сил, действукмлих на подвижный чувствительный элемент 1, близка к нулю а его положение близко к центральному,
В случае ЕЮЗКЮЖНОЙ недокомпенсацик
5 или перекомпенсации сигнал с датчика 4 перемещения чувствительного элемента через усилитель 5, сумматоры 9, 6 и блок 7 вьпштания поступает на электростатические электроды 2, 3, и силы,
0 действующие на подвижный чувствительный элемент, из леняются таким образом, чтобы он возвратился в центральное положение.
Так как при этом оттогонение чувстви5тельного элемента 1 весьма новеллке по сравнению с известным , то нелш1ейкость статической характеристики обратного пре.
образователя, возникающая за счет изменения вел1гчины зазора, з)1ачитольио
0 уменьщается, а значит лианеризуется и статическая характеристика всего акселерометра.
55
Формула изобретения
Компенсшиюпньгй акселерометр, содержащий подвижный чувствительный
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОГИРОСКОП ПРОФЕССОРА ВАВИЛОВА | 2012 |
|
RU2490592C1 |
| Емкостной акселерометр | 1984 |
|
SU1174861A1 |
| МУЛЬТИСЕНСОР | 1996 |
|
RU2104559C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2000 |
|
RU2173854C1 |
| Электростатический акселерометр | 1987 |
|
SU1525586A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1996 |
|
RU2096785C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1995 |
|
RU2100779C1 |
| Компенсационный акселерометр | 1981 |
|
SU1068820A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1996 |
|
RU2107301C1 |
| ГИРОСКОП-АКСЕЛЕРОМЕТР С ЭЛЕКТРОСТАТИЧЕСКИМ ПОДВЕСОМ РОТОРА И ПОЛНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИЕЙ | 2014 |
|
RU2568147C1 |
